Extensions to Network Flow Interdiction on Planar Graphs
Network flow interdiction analysis studies by how much the value of a maximum flow in a network can be diminished by removing components of the network constrained to some budget. Although this problem is strongly NP-complete on general networks, pse…
Authors: Rico Zenklusen
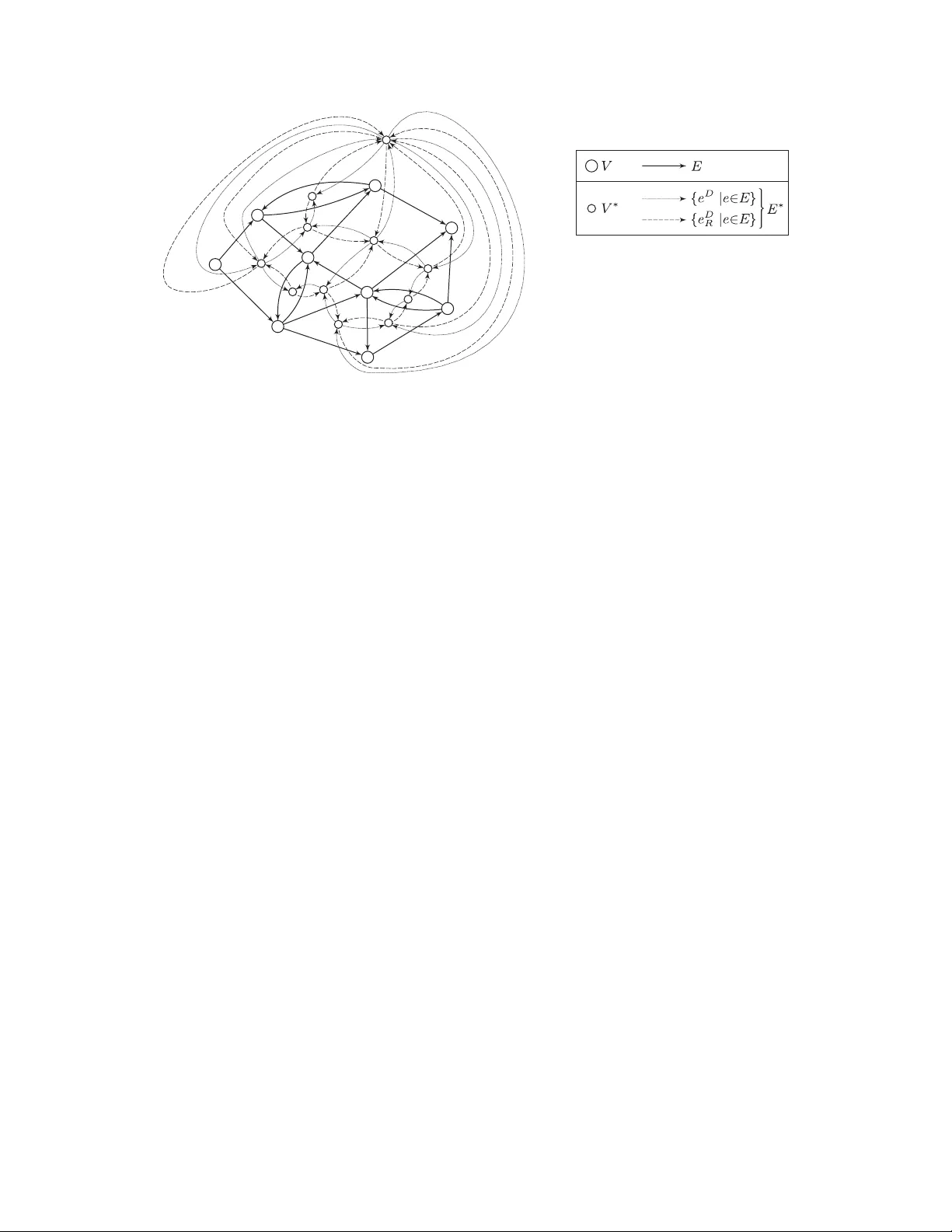
Extensions to Net w ork Flo w In terdiction on Planar Graphs Rico Zenklusen Institute for Op erations Researc h, ETH Zurich rico.zenklusen@ifor.math.ethz.c h No vem ber 4, 2021 Key w ords: net work flow interdiction, netw ork s ecurit y , planar graphs, planar duality Abstract Net work flow interdiction analysis studies by how muc h the v alue of a maximum flow in a netw ork can b e diminished b y remo ving components of the net work constrained to some budget. Although this problem is strongly NP-complete on general netw orks, pseudo-p olynomial algorithms were found for planar net works with a single source and a single sink and without the possibility to remo ve v ertices. In this work w e in tro duce pseudo-p olynomial algorithms which o vercome some of the restrictions of previous metho ds. W e prop ose a planarity-preserving transformation that allows to incorp orate vertex remo v als and vertex capacities in pseudo-p olynomial in terdiction algorithms for planar graphs. Additionally , a pseudo-p olynomial algorithm is introduced for the problem of determining the minimal interdiction budget whic h is at least needed to mak e it impossible to satisfy the demand of all sink nodes, on planar net works with multiple sources and sinks satisfying that the sum of the supplies at the source no des equals the sum of the demands at the sink no des. F urthermore we show that the k -densest subgraph problem on planar graphs can be reduced to a netw ork flow interdiction problem on a planar graph with multiple sources and sinks and p olynomially b ounded input num b ers. Ho wev er it is still not known if either of these problems can b e solv ed in p olynomial time. 1 In tro duction In this pap er w e are interested in minimizing the maximum flo w of a netw ork by removing arcs and vertices constrained to some interdiction budget. This problem is known as network inter diction or network flow inter diction 1 . One can either allo w or disallow partial remov al of arcs (remo ving half of an edge corresponds to reduce its capacity to half of the original v alue). How ev er the tec hniques and results seem not to substan tially differ on this issue. W e are in terested in the case without partial arc destruction. The problem of finding the k most vital ar cs of a flow net work is a sp ecial case of the netw ork interdiction problem where k arcs hav e to b e remov ed such that the maximum flow is reduced as m uch as p ossible. Net work in terdiction and related problems appear in v arious areas such as drug in terdiction [19], military planning [8], protecting electric p ow er grids against terrorist attac ks [17] and hospital infection control [2]. The netw ork in terdiction problem was shown to b e strongly NP-complete on general graphs and weakly NP-complete when restricted to planar graphs [15, 19]. Differen t algorithms for finding exact solutions w ere prop osed ([8, 13, 16, 19]) which are mainly based on branch and b ound pro cedures. In [3] a pseudo- appro ximation was presented. Earlier w ork include [18]. Ho wev er when dealing with planar graphs with a single source and sink it was shown that b y using planar dualit y , pseudo-po lynomial algorithms for the netw ork interdiction problem can b e constructed when only arc remov al is allow ed [15]. Two of the ma jor drawbac ks of these algorithms (apart from the fact that they can only b e applied on planar graphs) are the restrictions that only arc remov als are allow ed and that the net work m ust hav e exactly one source and one sink. V ertex remov al can easily b e form ulated as edge remo v al b y a standard technique of doubling vertices and multiple sources and sink are generally handled by the 1 The term network inhibition is also used. 1 in tro duction of a sup ersource and sup ersink [1, 6]. How ever, these transformations destro y planarity and mak e it imp ossible to profit from the curren tly known sp ecialized interdiction algorithms for planar graphs. In this work, we are interested in the dev elopment of pseudo-p olynomial algorithms for planar graphs whic h ov ercome some of the restrictions of previous methods. Inspired by algorithms presented in [10, 14], we prop ose a planarit y-preserving transformation that allo ws to incorp orate v ertex remo v als and v ertex capacities in pseudo-polynomial interdiction algorithms for planar graphs. Additionally , a pseudo-p olynomial algorithm is introduced for the problem of determining the minimal interdiction budget needed to mak e it imp ossible to satisfy the demand of all sink no des, on planar net works with multiple sources and sinks satisfying that the sum of the supplies at the source no des equals the sum of the demands at the sink no des. This problem is closely related to the problem of determining if a flow net work is n − k secure, i.e. any remo v al of k of its comp onen ts do es not infect the v alue of the maximum flow, and can b e seen as a sp ecial case of netw ork interdiction. It is not known if netw ork interdiction on planar netw orks with multiple sources and sinks is a strongly NP-complete problem. W e sho w that the k -densest subgraph problem on planar graphs, a problem for which neither a p olynomial algorithm is known nor is it kno wn if it is NP-complete, can b e reduced to a planar net work interdiction problem with p olynomially b ounded num b ers as input. The pap er is organized as follows. W e b egin b y giving some definitions and notations in Section 2. In Section 3, different known complexity results on net work interdiction are stated and w e show how the k - densest subgraph problem on planar graphs can b e reduced to a planar netw ork interdiction problem with small input num bers. Section 4 presents a simple extension of curren tly known algorithms for netw ork in terdiction problems on undirected net works were only arc remo v als are allow ed to the case of directed net works. W e present in Section 5 a pseudo-p olynomial algorithm for netw ork interdiction on planar s - t flo w net works allowing v ertex interdiction. In Section 6 we present a pseudo-p olynomial algorithm for a sp ecial net work flow interdiction problem with multiple sources and sinks. 2 Definitions and Notations Let ( V , E ) b e a directed graph where V is the set of vertices, E is the set of arcs and for every arc e ∈ E , u ( e ) ∈ { 0 , 1 , 2 , . . . } denotes its capacit y . Two sp ecial nodes s, t ∈ V , s 6 = t designate the source node resp ectiv ely the sink no de (the generalization to multiple sources and sinks is straightforw ard). W e call the net work G = ( V , E , u, s, t ) a flow netw ork. F or V 0 , V 00 ⊂ V we denote by ( V 0 , V 00 ) the set of all arcs from V 0 to V 00 . F urthermore, for V 0 ⊂ V we denote by ω + ( V 0 ) resp ectively ω − ( V 0 ) the set of all arcs exiting V 0 resp ectiv ely enterin g V 0 , i.e., ω + ( V 0 ) = ( V 0 , V \ V 0 ) and ω − ( V 0 ) = ( V \ V 0 , V 0 ) 2 . F or an y subset V 0 of V w e denote by [ V 0 , V \ V 0 ] the cut defined by V 0 . The v alue of the cut [ V 0 , V \ V 0 ] is P e ∈ ω + ( V 0 ) u ( e ). In the more general setting when every arc e ∈ E has an additional low er b ound l ( e ) on the capacity , the v alue of the cut [ V 0 , V \ V 0 ] is defined by ν ([ V 0 , V \ V 0 ]) = P e ∈ ω + ( V 0 ) u ( e ) − P e ∈ ω − ( V 0 ) l ( e ) 3 . A cut [ V 0 , V \ V 0 ] in G is called elementary if the subgraph of G induced b y V 0 is connected. F or tw o distinct vertices s, t ∈ V , a cut [ V 0 , V \ V 0 ] is called an s - t cut if s ∈ V 0 , t 6∈ V 0 . A function f : E → R is called a flo w in G (or simply flow if there is no danger of ambiguit y) if it satisfies the follo wing constraints: i) 0 ≤ f ( e ) ≤ u ( e ) ∀ e ∈ E ii) P e ∈ ω + ( v ) f ( e ) − P e ∈ ω − ( v ) f ( e ) = 0 ∀ v ∈ V \ { s, t } iii) P e ∈ ω + ( s ) f ( e ) − P e ∈ ω − ( s ) f ( e ) ≥ 0 . F or an s - t flow f we define its v alue ν ( f ) by P e ∈ ω + ( s ) f ( e ) − P e ∈ ω − ( s ) f ( e ). A maximum s - t flow is an s - t flo w f with maximum v alue. The v alue of a maximum s - t flow in a flow netw ork G is denoted by ν max ( G ). In the context of net work in terdiction, for ev ery arc and no de of the netw ork p ∈ V ∪ E an interdiction cost c ( p ) ∈ { 1 , 2 , 3 , . . . } ∪ {∞} is asso ciated (with c ( s ) = c ( t ) = ∞ ). The netw ork G = ( V , E , u, s, t, c ) is called an interdiction net work. An interdiction netw ork has unit interdiction costs if c ( p ) ∈ { 1 , ∞} ∀ p ∈ V ∪ E . 2 W e also use the notation ω + G and ω − G to sp ecify that we are working on the graph G . 3 Sometimes the notation ν G is used to sp ecify the netw ork. 2 The netw ork in terdiction problem asks to find a set R ⊂ V ∪ E resp ecting a given budget constrain t c ( R ) := P r ∈ R c ( r ) ≤ B (with B ∈ { 0 , 1 , 2 , . . . } ), and among all these sets minimizing the v alue of a maximum s - t flo w on the graph G \ R , which is the subgraph of G obtained b y removing the arcs and vertices contained in R (when removing a vertex, all arcs adjacen t to this v ertex are remov ed to o). The v alue of this minimum maxim um s - t flo w corresponding to budget B is denoted by ν max B ( G ) (w e therefore ha ve ν max ( G ) = ν max 0 ( G )). In this context a set R ⊂ V ∪ E satisfying the budget constraint will b e called an interdiction set. An optimal in terdiction set R minimizes the maxim um s - t flow with respect to the giv en budget. F urthermore an optimal in terdiction set R is called minimum if its interdiction cost c ( R ) is minim um among all optimal interdiction sets and it is called minimal when removing any arc from the in terdiction set results in a non-optimal in terdiction set. W e define the netw ork flow securit y problem to b e the problem of finding the minimal budget necessary to decrease the maximum flow by at least one unit, i.e., min { B ∈ { 0 , 1 , 2 , . . . } | ν max B ( G ) < ν max ( G ) } . The ab ov e definitions and problems can easily be extended to interdiction net works with m ultiple sources and sinks with fixed supply/demand. In this case an interdiction netw ork is giv en by G = ( V , E , u, S, T , c, d ) where S, T ⊂ V with S ∩ T = ∅ are the set of sources resp ectively sinks and the function d : V → Z is the demand/supply function and satisfies d ( s ) < 0 ∀ s ∈ S , d ( t ) > 0 ∀ t ∈ T and d ( v ) = 0 ∀ v ∈ V \ ( S ∪ T ). T o simplify notations a circuit C in G will b e represented by the set of arcs it contains. F or further graph-theoretical terms used in this pap er and not further sp ecified in this section w e refer to [11]. 3 Complexit y 3.1 Previous results W e asso ciate the following natural decision problems to the net work in terdiction problem resp ectively the net work flow security problem. Problem 1 (Decision version of net work interdiction problem) . Given an inter diction network G , some inter diction budget B ∈ { 0 , 1 , 2 , . . . } and a value K ∈ { 0 , 1 , 2 , . . . } , de cide whether ν max B ( G ) ≤ K ? Problem 2 (Decision version of net work flo w security) . Given an inter diction network G and an inter diction budget B ∈ { 0 , 1 , 2 , . . . } , de cide whether ν max B ( G ) < ν max ( G ) ? It is easy to observe that Problem 2 is a sp ecial case of Problem 1 by choosing K = ν max ( G ). Otherwise, when working on a class of in terdiction netw orks with a single source or sink, Problem 1 can b e reduced to Problem 2 by the following simple construction. Supp ose we ha ve a single source s (the case of a single sink is analogue). W e in tro duce a new v ertex s 0 whic h replaces s as source and add an unremov able arc from s 0 to s with capacity equal to K . Problem 2 on the mo dified in terdiction netw ork is then equiv alen t to Problem 1 on the initial interdiction netw ork. The follo wing theorem was shown in [19] b y reducing a maximum clique problem to Problem 1. Theorem 1 ([19]) . Pr oblem 1 is str ongly NP-c omplete even when the underlying inter diction network is r estricte d to unit inter diction c osts. F urthermore there is a trivial reduction from the binary knapsack problem (see [7] for more information on the binary knapsack problem) to an in terdiction problem on a graph with only tw o vertices [19] implying the follo wing theorem. Theorem 2 ([19]) . Pr oblem 1 is we akly NP-c omplete on planar gr aphs even when r estricte d to a single sour c e and sink. A pseudo-p olynomial algorithm for netw ork in terdiction problems on planar graphs with a single source and sink [15] show that that this class of problems is not strongly NP-complete. By the reducibility of Problem 1 to Problem 2, Theorem 1 and Theorem 2 apply also for Problem 2 when w orking on interdiction netw orks with a single source or a single sink. It is not known whether the class of interdiction problems on planar graphs with multiple sources and sinks is strongly NP-complete. F urthermore, the direct reduction from Problem 1 to Problem 2 is not p ossible anymore on this class of netw orks. W e will introduce in Section 6 a pseudo-p olynomial algorithm 3 for Problem 2 on the class of planar interdiction net works with multiple sources and sinks and such that the sum of the demands is equal to the sum of the supplies and equal to the maximum flo w in the initial netw ork. This algorithm do es not seem to generalize in a simple wa y to Problem 1. 3.2 Relation b et ween planar netw ork interdiction and the k -densest subgraph problem in planar graphs W e will show that finding dense subgraphs of a given size on planar graphs can easily b e mo delled as a planar netw ork interdiction problem. The problem of finding a densest subgraphs of size k is often called the k -densest subgraph problem or the k -clustering problem and is formally defined as follows. Problem 3 ( k -densest subgraph problem) . Given an undir e cte d gr aph G = ( V , E ) , find a sub gr aph over k vertic es with a maximum numb er of e dges. Whereas Problem 3 is known to b e NP-complete on a wide v ariet y of graph classes [4], its complexit y for the class of planar graphs is still op en. A slight mo dification of Problem 3 obtained by imp osing that the subgraph m ust b e connected was shown to b e NP-complete on planar graphs [9]. Theorem 3. The k -densest sub gr aph pr oblem on planar gr aphs c an b e r e duc e d in p olynomial time to a network inter diction pr oblem on planar gr aphs. Pr o of. Let G = ( V , E ) b e a planar undirected graph. Consider the follo wing planar interdiction net work G 0 = ( V 0 , E 0 , u, S, T , c, d ). The underlying graph ( V 0 , E 0 ) is obtained from G by sub dividing all edges, i.e., on ev ery edge e ∈ E , a new no de v e is added. W e thus obtain a bipartite planar graph where each edge has one endp oin t in V and the other one in the set of newly added vertices V E ( V 0 = V ∪ V E ). By directing all edges from V to V E , we get E 0 (c.f. Figure 1). The sets containing the sources and sinks are defined as follows S = V , T = V E , all arcs ha ve unit capacity u ( e ) = 1 ∀ e ∈ E 0 , sources ha ve infinite supply d ( s ) = ∞ ∀ s ∈ S and every sink has unit demand d ( t ) = 1 ∀ t ∈ T . F urthermore all arcs and all vertices of V E are unremov able (they ha ve an interdiction cost of ∞ ) and the vertices in V ha ve an interdiction cost equal to one. F or some fixed budget B ∈ { 0 , 1 , 2 . . . } , an optimal in terdiction set G 0 corresp onds exactly to the vertices of a B -densest subgraph in G b ecause of the following observ ation. F or some in terdiction set R , the decrease of flow by removing the comp onents in R corresp onds to the num b er of sinks for which b oth neigh b ors are in R . This corresp onds to the num b er of edges in G that hav e b oth endp oints in R . 4 Planar dualit y and curren t pseudo-p olynomial algorithms Planarit y is a very helpful prop erty when dealing with interdiction problems as the problem seems to hav e a simpler form when restated on the planar dual of the original interdiction netw ork. W e first introduce the planar dual of an interdiction netw ork, which can b e seen as a generalization of the classical planar dual. In a second step we prop ose a pseudo-p olynomial algorithm for planar netw ork interdiction with a single source and a single sink and without vertex remov als. This algorithm is a direct generalization of an algorithm in tro duced in [15], which was designed only for undirected netw orks 4 . The extensions we prop ose in the follo wing sections will ov ercome some restrictions of this algorithm. 4.1 Planar dualit y for in terdiction netw orks The classical planar dual 5 of a directed graph is constructed on the base of a planar embedding b y placing a vertex in each face of the original graph and connecting tw o v ertices by an arc if they corresp ond to faces in the original graph sharing an arc. This gives a natural one-to-one correspondence b etw een arcs in the original graph and arcs in the dual graph (dual arcs) as well as faces in the original graph and vertices in the dual graph, and vice versa. By conv ention, the dual arcs are oriented suc h that they cross the corresp onding original arcs from right to left. See [12] for more details. 4 F urthermore the algorithm w e presen t does not allow partial arc remov als whereas the algorithm presented in [15] did allow it. This makes no real difference as the technique applies easily to both cases. 5 It is also called ge ometric dual or simply dual . 4 Figure 1: T op ology of the auxiliary graph ( V 0 , E 0 ) used for pro ofing Theorem 3. F or our purp oses we extend the notion of planar duality on net works with lo wer and upp er capacities on the arcs and interdiction costs on the arcs. Let G = ( V , E , l , u, c ) b e a directed planar netw ork where for ev ery arc e ∈ E , l ( e ) , u ( e ) , c ( e ) ∈ { 0 , 1 , 2 , . . . } corresp ond to the lo wer capacity b ound, upp er capacit y b ound and interdiction cost of arc e (where l ( e ) ≤ u ( e ) ∀ e ∈ E ). W e define the dual G ∗ = ( V ∗ , E ∗ , λ ∗ , c ∗ ) of the net work G in the follo wing wa y . The graph ( V ∗ , E ∗ ) is the planar dual in the classical sense of the graph ( V , E ) with the single difference that for every arc in the dual we added a rev erse arc. F or every arc e ∈ E we denote by e D the corresp onding dual arc (as in the classical sense) and by e D R its reverse arc (cf. Figure 2). The function λ ∗ : E ∗ → Z is an integral length function in the netw ork G ∗ , defined by λ ∗ ( e D ) = u ( e ) and λ ∗ ( e D R ) = − l ( e ) ∀ e ∈ E . The cost function c ∗ is defined by c ∗ ( e D ) = c ( e ) , c ∗ ( e D R ) = 0 ∀ e ∈ E . F or every cut [ V 0 , V \ V 0 ] in the original netw ork we denote its corresp onding dual arcs by C ∗ ( V 0 ) = { e D ∈ E ∗ | e ∈ ( V 0 , V \ V 0 ) } ∪ { e D R ∈ E ∗ | e ∈ ( V \ V 0 , V 0 ) } . Note that the set C ∗ ( V 0 ) is a set of edge- disjoin t, counterclockwise non-ov erlapping circuits in ( V ∗ , E ∗ ), where non-o verlapping is defined as follows. Let C ∗ 1 , C ∗ 2 b e tw o circuits in G ∗ and V 1 , V 2 ⊂ V b e the vertices in V surrounded in counterclockwise sense b y C ∗ 1 resp ectiv ely C ∗ 2 . W e say that C ∗ 1 , C ∗ 2 do not ov erlap if V 1 ∩ V 2 = ∅ . The following prop osition highlights the corresp ondence of minimal cuts in the netw ork G and sets of non-o verlapping, edge-disjoint circuits in its dual G ∗ . Prop osition 1. The function that asso ciates with every cut [ V 0 , V \ V 0 ] its c orr esp onding dual ar cs C ∗ ( V 0 ) is a one-to-one mapping b etwe en cuts in G and sets of non-overlapping, e dge-disjoint, c ounter clo ckwise cir cuits in G ∗ . F urthermor e, the value of a cut in G is e qual to the sum of the lengths of the c orr esp onding dual ar cs in G D , i.e., for any subset V 0 ⊂ V , we have ν ([ V 0 , V \ V 0 ]) = X e ∗ ∈C ∗ ( V 0 ) λ ∗ ( e ∗ ) . Pr o of. The one-to-one prop erty follows easily by observing that for any set C ∗ 0 of non-ov erlapping, edge- disjoin t, coun terclo ckwise circuits, the set V 0 of all vertices b eing surrounded in counterclockwise sense by one of the circuits in C ∗ 0 satisfies C ∗ ( V 0 ) = C ∗ 0 . The equality b etw een the v alue of a cut in G and the sum of the lengths of the corresp onding dual arcs follows directly from the definition of λ ∗ . Prop osition 1 implies that for every minimal cut in G , there exists a corresp onding circuit in the dual G ∗ with length equal to the v alue of the cut. In particular, when working on a flow netw ork G = ( V , E , l , u, s, t ) with a single source s and a single sink t , ev ery minimal s - t cut in G corresp onds to a counterclockwise circuit around s with t separated from s by the circuit and with length equal to the v alue of the cut. W e call circuits that separate s and t in such a w ay s - t sep ar ating c ounter clo ckwise cir cuits . In the following we see ho w this corresp ondence can b e exploited for solving netw ork interdiction problems on planar graphs with a single source and a single sink. 5 Figure 2: Example dual graph ( V ∗ , E ∗ ) drawn o ver the giv en original graph ( V , E ). 4.2 A pseudo-p olynomial algorithm for single source, single sink net w ork in ter- diction on planar graphs without v ertex remo v al W e now construct a pseudo-p olynomial algorithm for solving the netw ork interdiction problem on planar directed graphs with a single source s and a single sink t and without vertex remov al, whic h is a direct generalization of an algorithm pres en ted in [15] (that only work ed for undirected graphs). This algorithm nicely illustrates the tec hniques curren tly used for creating pseudo-p olynomial netw ork interdiction algorithms on planar graphs. Given is an interdiction net work G = ( V , E , u, s, t, c ) with unremo v able vertices, i.e., c ( r ) = ∞ ∀ r ∈ V , and interdiction budget B . F or every interdiction set R ⊂ E we fix a minimum s - t cut in G \ R that w e denote b y [ V R , V \ V R ]. W e therefore hav e ν max ( G \ R ) = ν ([ V R , V \ V R ]) − P e ∈ R ∩ ω + ( V R ) c ( e ). Note that an optimal, minimal interdiction set R alwa ys satisfies R ⊂ ω + ( V R ), as otherwise the interdiction set R 0 = R ∩ ω + ( V R ) w ould reduce the maximum flow by the same v alue as R and has lo wer interdiction cost. The reduced v alue of an s - t cut C (with resp ect to the budget B ) is defined as the minimum v alue of C in G \ R ov er all interdiction sets R and is denoted by ν B ( C ). Note that the problem to find for some giv en s - t cut C an in terdiction set R that minimizes the v alue of C in G \ R is a binary knapsack problem. The main idea of the algorithm is to find an optimal, minimum interdiction set R b y finding a corresp onding s - t cut with minimal reduced v alue. This is done by translating the problem into the dual. F or any set of edges U ∗ ⊂ E ∗ , we define its reduced length (with resp ect to B ) b y λ ∗ B ( U ∗ ) = min { P e ∗ ∈ U ∗ \ X ∗ λ ∗ ( e ∗ ) | X ∗ ⊂ U ∗ , P e ∗ ∈ X ∗ c ∗ ( e ∗ ) ≤ B } . Similarly for a walk W ∗ in G ∗ going along the arcs ( e ∗ 1 , e ∗ 2 , . . . , e ∗ k ), w e define λ ∗ B ( W ∗ ) = min { P i ∈{ 1 , 2 ,...,k }\ I λ ∗ ( e ∗ i ) | I ⊂ { 1 , 2 , . . . , k } , P i ∈ I c ∗ ( e ∗ ) ≤ B } . By the corresp ondence b etw een s - t cuts in G and s - t separating counterclockwise circuits in G ∗ as highligh ted in Section 4.1, we hav e that the problem of finding an s - t cut in G with minimal reduced v alue is equiv alent to finding an s - t separating coun terclo ckwise circuit with minimal reduced length in the dual. Suc h circuits can b e describ ed in the follo wing w ay . Let P b e an y path in the graph G from v ertex s to v ertex t , w e define P D = { e D ∈ E ∗ | e ∈ P } and P D R = { e D R ∈ E ∗ | e ∈ P } . F or any set of edges U ∗ ⊂ E ∗ w e define its parity with resp ect to P b y p P ( U ∗ ) = | U ∗ ∩ P D | − | U ∗ ∩ P D R | . By a result of [14] we hav e that for every circuit C ∗ in G ∗ , t wo consecutive crossings on P alternate b etw een left-right crossing and right-left ones. This implies that every circuit C ∗ in G satisfies p P ( C ∗ ) ∈ {− 1 , 0 , 1 } . Another implication is that a circuit C ∗ in G ∗ has the prop erties to b e coun terclo ckwise s - t separating if and only if p P ( C ∗ ) = 1. W e therefore hav e to solv e the following problem. Problem 4. argmin { λ ∗ B ( C ∗ ) | C ∗ cir cuit in G ∗ with p P ( C ∗ ) = 1 } Consider the following relaxation of Problem 4. 6 Problem 5. argmin { λ ∗ B ( W ∗ ) | W ∗ close d walk in G ∗ with p P ( W ∗ ) = 1 } A solution to Problem 4 can b e easily obtained on the base of a solution W ∗ to Problem 5 by the following observ ation. W ∗ can b e partitioned in a disjoint union of circuits C ∗ 1 , C ∗ 2 , . . . , C ∗ k . F urthermore, by mo dularity of the parity function p P and the fact that p P ( W ∗ ) = 1, w e ha ve 1 = p P ( W ∗ ) = P k i =1 p P ( C ∗ i ). As the parity of eac h circuit is in {− 1 , 0 , 1 } we ha ve that there is some index i ∈ { 1 , 2 , . . . , k } with p P ( C ∗ i ) = 1. F rom C ∗ i ⊂ W ∗ follo ws that λ ∗ B ( C ∗ i ) ≤ λ ∗ B ( W ∗ ). By optimality of W ∗ for Problem 5 we thus hav e λ ∗ B ( C ∗ i ) = λ ∗ B ( W ∗ ) and by the fact that Problem 5 is a relaxation of Problem 4 follo ws that C ∗ i is an optimal solution for Problem 4. More generally , the ab ov e reasoning shows that minimal solutions of Problem 5 corresp ond to solutions of Problem 4 and vice versa. W e finally sho w how Problem 5 can b e solved by a dynamic programming approach that we realize as a sequence of shortest path problems on an auxiliary graph G 0 = ( V 0 , E 0 , λ 0 ) with p ositive arc lengths λ 0 whic h is defined as follows. Let P b e a shortest path from s to t in G and we denote b y | P | the length of the path whic h is the num b er of arcs used in P . V 0 consists of | V ∗ | · ( B + 1) · (2 | P | + 1) v ertices that we denote in the following wa y V 0 = { v ∗ b,p | v ∗ ∈ V ∗ , b ∈ { 0 , 1 , . . . , B } , p ∈ {−| P | , −| P | + 1 , . . . , | P |} . The set of arcs E 0 is defined b y E 0 = E 0 0 ∪ E 0 1 , = ∪ E 0 1 , + ∪ E 0 1 , − ∪ E 0 2 , = ∪ E 0 2 , + ∪ E 0 2 , − with • E 0 0 = { ( v ∗ b,p , v ∗ b − 1 ,p ) | v ∗ b,p ∈ V 0 , b ∈ { 1 , 2 , . . . , B } , p ∈ {−| P | , −| P | + 1 , . . . , | P |}} • E 0 1 , = = { ( u ∗ b,p , v ∗ b,p ) | ( u ∗ , v ∗ ) ∈ E ∗ \ ( P D ∪ P D R ) , b ∈ { 0 , 1 , . . . , B } , p ∈ {−| P | , −| P | + 1 , . . . , | P |}} • E 0 1 , + = { ( u ∗ b,p , v ∗ b,p +1 ) | ( u ∗ , v ∗ ) ∈ P D , b ∈ { 0 , 1 , . . . , B } , p ∈ {−| P | , −| P | + 1 , . . . , | P | − 1 }} • E 0 1 , − = { ( u ∗ b,p , v ∗ b,p − 1 ) | ( u ∗ , v ∗ ) ∈ P D R , b ∈ { 0 , 1 , . . . , B } , p ∈ {−| P | + 1 , −| P | + 2 , . . . , | P |}} • E 0 2 , = = { ( u ∗ b 1 ,p , v ∗ b 2 ,p ) | ( u ∗ , v ∗ ) ∈ E ∗ \ ( P D ∪ P D R ) , b 1 ∈ { c ∗ ( u ∗ , v ∗ ) , c ∗ ( u ∗ , v ∗ ) + 1 , . . . , B } , b 2 = b 1 − c ∗ ( u ∗ , v ∗ ) , p ∈ {−| P | , −| P | + 1 , . . . , | P |}} • E 0 2 , + = { ( u ∗ b 1 ,p , v ∗ b 2 ,p +1 ) | ( u ∗ , v ∗ ) ∈ P D , b 1 ∈ { c ∗ ( u ∗ , v ∗ ) , c ∗ ( u ∗ , v ∗ ) + 1 , . . . , B } , b 2 = b 1 − c ∗ ( u ∗ , v ∗ ) , p ∈ {−| P | , −| P | + 1 , . . . , | P | − 1 }} • E 0 2 , − = { ( u ∗ b 1 ,p , v ∗ b 2 ,p − 1 ) | ( u ∗ , v ∗ ) ∈ P D R , b 1 ∈ { c ∗ ( u ∗ , v ∗ ) , c ∗ ( u ∗ , v ∗ ) + 1 , . . . , B } , b 2 = b 1 − c ∗ ( u ∗ , v ∗ ) , p ∈ {−| P | + 1 , −| P | + 2 , . . . , | P |}} . W e define a function η : V 0 ∪ ( E 0 \ E 0 0 ) → V ∪ E that maps elements of G 0 to corresp onding elemen ts in G ∗ in the following wa y . η ( v ∗ b,p ) = v ∗ ∀ v ∗ b,p ∈ V 0 η ( v ∗ b 1 ,p 1 , u ∗ b 2 ,p 2 ) = ( v ∗ , u ∗ ) ∀ ( v ∗ b 1 ,p 1 , u ∗ b 2 ,p 2 ) ∈ E 0 \ E 0 0 The length λ 0 : E 0 → { 0 , 1 , . . . } is defined as follows. λ 0 ( e 0 ) = ( 0 if e 0 ∈ E 0 0 ∪ E 0 2 , = ∪ E 0 2 , + ∪ E 0 2 , − λ ∗ ( η ( e 0 )) if e 0 ∈ E 0 1 , = ∪ E 0 1 , + ∪ E 0 1 , − W e now define a corresp ondence b etw een walks in G 0 and w alks in G ∗ b y extending the function η in the follo wing wa y . Let u ∗ b 1 ,p 1 , v ∗ b 2 ,p 2 ∈ V 0 , W 0 b e a w alk in G 0 from u ∗ b 1 ,p 1 to v ∗ b 2 ,p 2 and ( e 0 1 , e 0 2 , . . . , e 0 k ) the suite of edges corresp onding to the walk W 0 . F urthermore, let I = { i ∈ { 1 , 2 , . . . , k } | e 0 i ∈ E 0 \ E 0 } . The walk η ( W 0 ) in G 0 is defined to go along the edges ( η ( e 0 i )) i ∈ I . It is easy to verify that η ( W 0 ) is effectively a walk (from u ∗ to v ∗ ) in G ∗ and satisfies p P ( η ( W 0 )) = p 2 − p 1 . W e asso ciate to the walk W 0 a set R ( W 0 ) ⊂ E defined b y R ( W 0 ) = { e ∈ E | ∃ i ∈ I with e 0 i ∈ E 0 2 , = ∪ E 0 2 , + ∪ E 0 2 , − and e D = η ( e 0 i ) } . By construction of G 0 w e hav e c ( R ( W 0 )) ≤ b 1 − b 2 6 . Therefore, for an y path W 0 in G 0 , the set R ( W 0 ) is an interdiction set. F urthermore, w e ha ve λ ∗ b 1 − b 2 ( η ( W 0 )) ≤ λ 0 ( W 0 ) b ecause by setting the length of the arcs R ( W 0 ) D in G ∗ to zero, the length of η ( W 0 ) is smaller or equal than λ 0 ( W 0 ) 7 . In particular, if the walk W 0 go es from v ∗ B , 0 to v ∗ 0 , 1 for some v ∗ ∈ V ∗ , w e then hav e that η ( W 0 ) is a closed walk in G ∗ with p P ( η ( W 0 )) = 1 and satisfying λ ∗ B ( η ( W 0 )) ≤ λ 0 ( W 0 ). Con v ersely , for every circuit C ∗ in G ∗ satisfying p P ( C ∗ ) = 1, we can find a corresp onding path P 0 in G 0 with λ 0 ( P 0 ) = λ ∗ B ( C ∗ ) in the follo wing wa y . Let ( e ∗ 1 , e ∗ 2 , . . . , e ∗ k ) b e a suite of arcs in E ∗ corresp onding to the circuit C ∗ and v ∗ ∈ V ∗ b e 6 When η ( W 0 ) corresp onds to a path or a circuit, this relation is alwa ys satisfied with equality . 7 Here to o, in case that η ( W 0 ) corresp onds to a path or a circuit, we hav e λ ∗ b 1 − b 2 ( η ( W 0 )) = λ 0 ( W 0 ). 7 the vertex corresp onding to the tail of e ∗ 1 . Let I ⊂ { 1 , 2 , . . . , k } b e a set satisfying P i ∈ I c ∗ ( e ∗ i ) ≤ B and λ ∗ B ( C ∗ ) = P i ∈ I λ ∗ ( e ∗ i ). The path P 0 will b e defined by its corresp onding suite of arcs ( e 0 1 , e 0 2 , . . . , e 0 k 0 ) as follows. W e set k 0 = k + B − P i ∈ I c ∗ ( e ∗ i ). P 0 starts at the vertex v ∗ B , 0 . The path P 0 will b e defined by adding edges step by step. F or i ∈ { 1 , 2 , . . . , k } let e ∗ i = ( u ∗ , v ∗ ) and u ∗ b,p b e the endp oint of the currently constructed path. If i ∈ I , w e set e 0 i = ( u ∗ b,p , v ∗ b − c ∗ ( e ∗ i ) ,p + p P ( e ∗ i ) ) and otherwise e 0 i = ( u ∗ b,p , v ∗ b,p + p P ( e ∗ i ) ). F or i ∈ { k + 1 , k + 2 , . . . , k 0 } , we set e 0 i = ( v ∗ k 0 − i +1 , 1 , v ∗ k 0 − i, 1 ). It is easy to verify that P 0 is effectively a path in G 0 with η ( P 0 ) = C ∗ satisfying λ 0 ( P 0 ) = λ ∗ B ( C ∗ ). Let v ∗ ∈ V ∗ b e some fixed v ertex and P 0 b e a shortest path from v ∗ B , 0 to v ∗ 0 , 1 . The discussion ab ov e sho ws that η ( P 0 ) is a solution to the following problem. Problem 6. argmin { λ ∗ B ( W ∗ ) | W ∗ close d walk in G ∗ c ontaining vertex v ∗ and satisfying p P ( W ∗ ) = 1 } Solving Problem 6 for all vertices v ∗ ∈ V ∗ will solve Problem 5. How ever, as a walk solving Problem 5 will pass at least once by an arc e 0 with η ( e 0 ) ∈ P D it suffices to solve Problem 6 for all vertices in G ∗ ha ving at least one outgoing edge contained in P D . Therefore, it suffices to solve | P | instances of Problem 6 to get a solution to Problem 5. Notice that solving the netw ork interdiction problem with the ab ov e algorithm for some budget B , solv es also the interdiction problems for all budgets B 0 < B . This solution can b e obtained in an analogue manner as for the case with budget B by lo oking in G 0 at w alks from v ∗ B , 0 to v ∗ B − B 0 , 1 . Applying Dijkstra’s algorithm for shortest paths to solve the subproblems of Problem 6, the algorithm in tro duced ab ov e to solve Problem 5 gets an o v erall complexity of O ( B | P | 2 n log( nB )). Because of the sp ecial structure of the net work G 0 it is easy sligh tly improv e the running time by handling the vertices in Dijkstra’s algorithm lev el by level with resp ect to the remaining budget, i.e., we handle all vertices corresp onding to a budget B first (alw ays taking the one with the smallest lab el as usual), then all with budget B − 1 and so on. When lo oking for the v ertex with the smallest lab el, we only hav e O ( n ) candidates instead of O ( nB ). This allo ws to reduce the running time to O ( B | P | 2 n log( n )). By reversing the roles of budget and length in the prop osed algorithm, one can replace B in the ab ov e running times by ν max B ( G ). Notice that the prop osed metho d can b e slightly simplified (without influencing the ab ov e running time b ounds) allo wing for the parit y only to tak e v alues in {−d | P | 2 e , −d | P | 2 e + 1 , . . . , d | P | 2 e} instead of {−| P | , −| P | + 1 , . . . , | P |} as every circuit in G ∗ with parity equal to one contains no subpath with a parity not contained in this range b ecause it would not b e p ossible to come back to parit y one without going tw o times through a same vertex. The form ulation of Problem 6 as a shortest path problem on G 0 is essen tially a dynamic programming realization of a m ulti-ob jective shortest path problem with the three ob jectives budget, length and parit y on a graph G defined as follows. The graph G = ( V ∗ , E ) is obtained from the graph G ∗ = ( V ∗ , E ∗ ) b y doubling ev ery arc. F or every arc e D ∈ E ∗ , we denote by e 1 , e 2 the tw o corresp onding parallel arcs in E . T o every arc in E we asso ciate a parity v alue, a length and a budget v alue. The parity v alue of e 1 and e 2 is set to p P ( e ). The length of e 1 is equal to u ( e ) and the length of e 2 is set to zero. Finally , the budget v alue is set to zero for e 1 and to c ( e ) for e 2 . Therefore, the arcs in E indexed by one corresp ond to non-remo ved arcs and the ones indexed by tw o corresp ond to remov ed arcs. F or some fixed vertex v ∗ ∈ V ∗ , a closed w alk in G con taining v , having parity equal to one, a budget v alue b ounded by B and with minimal length among all those closed walks corresp onds exactly to a solution to Problem 6. 5 Incorp orating v ertex in terdiction and v ertex capacities Let G = ( V , E , u, s, t, c ) b e an interdiction net work. In this section we show how v ertex interdiction and v ertex capacities can b e incorp orated in the algorithm of the previous section. W e b egin by introducing the p ossibilit y of vertex in terdiction and observe afterwards ho w v ertex capacities can b e added to the mo del. The role of the dual net work G ∗ will b e replaced by a mo dified dual f G ∗ whic h allows to mo del vertex interdiction basically as arc interdiction. This technique was used in [10] for mo delling vertex capacities in planar flow problems. As we will see in this section, this mo del can also b e used for mo delling vertex in terdiction. The mo dified dual w e presen t in this section and extend in the next one is sligh tly differen t from the one presen ted in [10], using some less artificially added vertices. 8 The mo dified dual netw ork f G ∗ = ( f V ∗ , f E ∗ , f λ ∗ , e c ∗ ) is an extended v ersion of G ∗ = ( V ∗ , E ∗ , λ ∗ , c ∗ ) with additional vertices and arcs defined as follo ws. F or every vertex v ∈ V we denote by f ∗ ( v ) the face of G ∗ corresp onding to v . Similarly , for every v ∗ ∈ V ∗ w e denote by f ( v ∗ ) the face of G corresp onding to v ∗ . The net work f G ∗ consists of the vertices V ∗ and contains an additional vertex for every face of G ∗ . Because of the one-to-one relation b etw een faces in G ∗ and vertices in G we set f V ∗ = V ∗ ∪ V . The arc set f E ∗ is defined b y f E ∗ = E ∗ ∪ g E V where g E V con tains the tw o arcs ( v , v ∗ ) and ( v ∗ , v ) for every pair of v ∈ V and v ∗ ∈ V ∗ , where f ( v ∗ ) is a face adjacent to v (c.f. Figure 3). The length function f λ ∗ is an extension of λ ∗ on the arcs f E ∗ giving a v alue of ∞ to all arcs in g E V (or simply a high finite v alue assuring that the arc is never used in follo wing applications of shortest path algorithms). F urthermore, the mo dified interdiction cost function e c ∗ is an extension of c ∗ on the arcs in f E ∗ defined as follows. e c ∗ ( e ∗ ) = c ∗ ( e ∗ ) ∀ e ∗ ∈ E ∗ e c ∗ ( v , v ∗ ) = 0 ∀ ( v , v ∗ ) ∈ g E V ∩ V × V ∗ e c ∗ ( v ∗ , v ) = c ( v ) ∀ ( v ∗ , v ) ∈ g E V ∩ V ∗ × V F or some subset of arcs f U ∗ ⊂ f E ∗ w e define their reduced cost in e G ∗ with resp ect to the budget B b y f λ ∗ B ( f U ∗ ) := min { P f e ∗ ∈ f U ∗ \ X ∗ f λ ∗ ( e e ∗ ) | X ∗ ⊂ f U ∗ , P f e ∗ ∈ X ∗ e c ∗ ( e e ∗ ) ≤ B } . The main idea of this mo del lies in the follo wing corresp ondence b etw een in terdiction sets in G and s - t separating coun terclo ckwise circuits in f G ∗ . Theorem 4. i) F or every inter diction set R ⊂ V ∪ E with r esp e ct to the budget B , ther e is an s - t sep ar ating c ounter- clo ckwise cir cuit f C ∗ in f G ∗ satisfying f λ ∗ B ( f C ∗ ) ≤ ν max ( G \ R ) . ii) F or every s - t sep ar ating c ounter clo ckwise cir cuit in f G ∗ and every budget B , ther e is an inter diction set R ⊂ V ∪ E with r esp e ct to B satisfying ν max ( G \ R ) ≤ f λ ∗ B ( f C ∗ ) . Pr o of. Let R ⊂ V ∪ E b e an interdiction set with resp ect to some fixed budget B and U ⊂ E b e a set of arcs corresp onding to a minimum s − t cut in G \ R . As there is no path from s to t in the graph G \ ( R ∪ U ), it is easy to see (by means of the Jordan curve theorem) that there is an s - t separating counterclockwise circuit f C ∗ in f G ∗ consisting only of arcs which are either adjacent to vertices in R or are dual arcs of arcs con tained in R or U . W e therefore hav e as desired f λ ∗ B ( e C ∗ ) ≤ ν max ( G \ R ). Con versely let f C ∗ b e an s - t separating coun terclo ckwise circuit in f G ∗ satisfying f λ ∗ B ( f C ∗ ) < ∞ (when the reduced dual length is equal to ∞ , the result follows trivially). Let f U ∗ ⊂ f E ∗ b e a solution of argmin f X ∗ ⊂ f C ∗ { X f e ∗ ∈ f C ∗ \ f X ∗ λ ∗ ( e ∗ ) | e c ∗ ( f X ∗ ) ≤ B } . By definition of the reduced dual length we hav e f λ ∗ B ( f C ∗ ) = f λ ∗ ( f C ∗ \ f U ∗ ). Let V f C ∗ b e the subset of vertices in V through whic h the circuit f C ∗ passes and let U ∗ = f U ∗ ∩ E ∗ . Because of f λ ∗ B ( f C ∗ ) < ∞ we ha v e that all arcs of f C ∗ en tering in one of the vertices in V f C ∗ are contained in f U ∗ . The cost of f U ∗ can therefore b e reformulated as follo w. e c ∗ ( f U ∗ ) = c ∗ ( U ∗ ) + c ( V f C ∗ ) Let U = { e ∈ E | e D ∈ U ∗ } and we define R = V f C ∗ ∪ U . By the ab ov e equation and the definition of f U ∗ w e ha ve c ( R ) = c ∗ ( U ∗ ) + c ( V f C ∗ ) = e c ∗ ( f U ∗ ) ≤ B showing that R is an interdiction set with resp ect to the budget B . Let E ∗ f C ∗ = f C ∗ ∩ E ∗ and E f C ∗ = { e ∈ E | e D ∈ E ∗ f C ∗ } . The fact that f C ∗ is a counterclockwise, s - t separating circuit implies that there is no path from s to t in G \ ( V f C ∗ ∪ E f C ∗ ). Therefore, removing the arcs E f C ∗ \ U from G \ R destroys all paths from s to t implying ν max ( G \ R ) ≤ u ( E f C ∗ \ U ). The result is finally obtained b y observing that u ( E f C ∗ \ U ) = f λ ∗ ( f C ∗ \ f U ∗ ) = f λ ∗ B ( f C ∗ ). Theorem 4 implies that the problem of finding by ho w m uch the v alue of a maximum flow can b e reduced through interdiction reduces to finding an s - t separating counterclockwise circuit with minimal reduced v alue 9 Figure 3: T op ology of the auxiliary graph ( e V ∗ , e E ∗ ) used for mo deling vertex in terdiction. in f G ∗ . F urthermore, the pro of of Theorem 4 shows ho w one can transform such a circuit to an optimal in terdiction set. F or characterizing s - t separating counterclockwise circuits, w e in tro duce an adapted version of the parity function. As in the previous section, let P b e a path in G from v ertex s to vertex t . Because in the graph f G ∗ it is p ossible to cross P at a vertex, we hav e to take this p ossibility into accoun t in the parity function. W e therefore define a parit y function f p P whic h is an extension of p P on the subsets of f E ∗ in the following w ay . F or every vertex v ∈ V \ { s, t } whic h lies on the path P and every arc ( v , v ∗ ) ∈ f E ∗ whic h lea ves P on the left side, we set f p P ( v , v ∗ ) = 1. Similarly , for every vertex v ∈ V \ { s, t } on P and every arc ( v ∗ , v ) ∈ f E ∗ whic h enters P from the left side w e set f p P ( v ∗ , v ) = − 1. F or all other edges in f E ∗ w e set f p P = 0. Finally , for an y set f U ∗ ⊂ f E ∗ w e define its parit y by f p P ( f U ∗ ) = P f e ∗ ∈ f U ∗ f p P ( e e ∗ ). As in the previous section, we ha ve, by this definition of f p P , that a circuit f C ∗ in f G ∗ has the prop erties to b e coun terclo ckwise s - t separating if and only if f p P ( f C ∗ ) = 1. Applying the techniques of the previous section to the mo dified dual f G ∗ allo ws therefore to solve netw ork in terdiction problems on planar graphs with a single source and sink and with the p ossibilit y to in terdict arcs and vertices. The asymptotic worst case complexity stays the same as in the previous section b ecause the size of the graph f G ∗ is only at most a constant factor larger than G ∗ , and the same is true for the num b er of times Problem 5 has to b e solved. Upp er capacities on the v ertices can b e introduced in the same wa y as shown in [10] by slightly mo difying the netw ork f G ∗ as follows. Supp ose that some vertex v ∈ V has an upp er capacit y u ( v ) ∈ { 1 , 2 , . . . } . Let V ∗ v = { v ∗ ∈ V ∗ | ( v ∗ , v ) ∈ f E ∗ } . F or every v ∗ ∈ V ∗ v , an additional arc from v ∗ to v is added with interdiction cost ∞ and capacit y u ( v ). F or a justification of this construction in the case without interdiction (resp ectively b y setting B = 0), see [10]. Theorem 4 remains true for the mo dified netw ork mo delling vertex capacities. This can b e prov en in an analogue wa y as for the case without vertex capacities. T o simplify further results, w e consider in the follo wing only flo w net works without v ertex capacities. V ertex capacities can easily b e added b y the ab ov e construction. The metho d presented in the next section to solv e the netw ork flo w securit y problem on netw orks with m ultiple sources and sinks differs significan tly from the approach presented in Section 4.2. Therefore the mo del presen ted in this section do es not apply directly to this case. W e will see in the next section ho w the mo del for vertex interdiction can b e adapted (the adaption for vertex capacities will b e analogue). 6 Pseudo-p olynomial algorithm for netw ork flow securit y In this section we prop ose a pseudo-p olynomial algorithm for the netw ork flow security problem on planar graphs with m ultiple sources and sinks where the sum of the demands is equal to the sum of the supplies and equal to the maximum flow. The metho d is inspired by an algorithm introduced in [14] for testing if all demand can b e satisfied in a planar flow problem with mu ltiple sources and sinks. W e will therefore b egin with a short summary of this maximum flow algorithm for planar graphs in Subsection 6.1. Our algorithm for netw ork flo w securit y will be introduced in Subsection 6.2 restricted to the case without vertex remov als. 10 This restriction will b e lifted in Subsection 6.3 by adapting the mo delling idea of Section 5. 6.1 Maxim um flo w algorithm of Miller and Naor In this section we briefly present an algorithm in tro duced in [14] for testing if all demands can b e satisfied in a flow problem with multiple sources and sinks such that the sum of all demands equals the sum of all supplies. Let G = ( V , E , l , u, S , T , d ) b e a planar flow net work with low er and upp er limits on the capacities designated b y l and u , with source set S ⊂ V and sink set T ⊂ V \ S and with demand/supply function d satisfying − d ( S ) = d ( T ). A flow in G is called satur ating if it satisfies all demands. The problem w e wan t to solv e is the following. Problem 7. Do es ther e exist a satur ating flow in G ? In a first step, the problem is reduced to a circulation problem on a net work b G , whic h is the problem of finding a flow in a net work with low er and upp er capacities on the arcs but without sources and sinks. The netw ork b G = ( b V = V , b E , b l, b u ) is defined as follo ws. Let T 0 b e an undirected tree o ver the v ertices in V that spans the sources and sinks and that can b e added to G without destroying planarity . F or every edge { v , u } ∈ T 0 w e denote by V T 0 ( v , u ) ⊂ V the set of vertices connected to vertex v in T 0 \ { v , u } . W e orient the edges in T 0 to obtain T in the following w ay . F or { v, u } ∈ T 0 w e orien t the edge from v to u if d ( V T 0 ( v , u )) ≥ 0, otherwise w e orient the edge from u to v . The set b E is defined to b e E ∪ T . F urthermore, the low er and upp er capacities b l and b u are extensions of l and u on the set b E defined b y b l ( v , u ) = b u ( v, u ) = d ( V T 0 ( v , u )) ∀ ( v , u ) ∈ T . As noted in [14] we hav e the follo wing theorem. Theorem 5. Ther e exists a satur ating flow in G ⇔ ther e exists a cir culation in b G . A circulation in a planar flow netw ork can b e computed by solving shortest path problem in its dual in the follo wing wa y . Let b G ∗ = ( b V ∗ , b E ∗ , b λ ∗ ) b e the dual netw ork of b G as defined in Section 4, with the difference that we hav e no dual costs b c ∗ as we deal with a standard flow netw ork and not an interdiction netw ork. Let b r ∗ ∈ b V ∗ b e an arbitrary v ertex in b G ∗ and for b v ∗ ∈ b V ∗ let µ ( b v ∗ ) b e the distance of a shortest path from b r ∗ to b v ∗ (with resp ect to the length b λ ∗ ). In [14] the following theorem was prov en. Theorem 6. Ther e exists a cir culation in b G ⇔ b G ∗ has no ne gative cir cuits. In this case, a circulation can b e obtained in the following wa y . Let ( b v , b u ) ∈ b E and ( b v ∗ , b u ∗ ) = ( b v , b u ) D its corresp onding dual arc. A circulation can finally be defined b y assigning a flow equal to max { 0 , µ ( b u ∗ ) − µ ( b v ∗ ) } to eac h arc ( b v , b u ) ∈ e E . 6.2 Net w ork security on planar graphs with m ultiple sources and sinks Let G = ( V , E , l, u, S, T , d, c ) b e a planar in terdiction netw ork satisfying − d ( S ) = d ( T ) and without vertex remo v al. Let ( b V , b E , b l, b u ) b e the auxiliary netw ork corresponding to ( V , E , l , u, S, T , d ) as defined in Section 6.1. W e extend this auxiliary net work to b G = ( b V , b E , b l, b u, b c ) where b c is an extension of c on the set b E , satisfying b c ( b e ) = ∞ ∀ b e ∈ b E \ E . Let b G ∗ = ( b V ∗ , b E ∗ , b λ ∗ , b c ∗ ) b e its corresp onding dual netw ork as defined in Section 4. Using Theorem 6 we can formulate a problem on b G ∗ , whic h is equiv alen t to Problem 2 for G , as follo ws. Problem 8. Do es ther e exist a cir cuit b C ∗ in b G ∗ with b λ ∗ B ( b C ∗ ) < ν max ( G ) ? The circuit with minimum reduced cost can b e found by similar tec hniques as the ones presented in Section 4 with the differences that we do not hav e to tak e parit y in to ac coun t and that we hav e to use a shortest path algorithm, whic h can deal with negative arc lengths. A simple implementation would b e first to determine shortest paths for all pairs of vertices in b G . By using an algorithm presented in [5] this can b e done in O ( n 2 log 3 n ) time. T o chec k if there is a circuit with negative reduced v alue in b G ∗ going through some fixed v ertex b v ∗ ∈ b V ∗ , a shortest path in an auxiliary netw ork as describ ed in Section 4 will b e determined. This can b e done by determining the shortest paths from some initial vertex to all others by pro ceeding level b y level with resp ect to the remaining budget using at each lev el information of the prepro cessing step. Ov er the B budget levels, this can be done in O ( B n 2 ) time. By simply p erforming this op eration for all p ossible start vertices, we get a running time of O ( B n 3 ). By reversing the roles of budget and length, w e can get an algorithm with running time O ( ν max B ( G ) n 3 ). W e exp ect that this running time can even b e improv ed b y exploiting more deeply the structure of the auxiliary graph. 11 6.3 Generalization to the case with v ertex in terdiction Let G = ( V , E , l, u, S, T , d, c ) b e a planar interdiction net work satisfying − d ( S ) = d ( T ) and allowing arc and vertex remov al (except for sources and sinks). As in the case without vertex remov al, we b egin b y reform ulating the problem as an in terdiction problem for circulations. Let b G = ( b V = V , b E , b l, b u, b c ) b e the auxiliary graph as defined in Section 6.2 and as b efore we denote by T = b E \ E the added tree arcs. W e no w discuss how arc and vertex remov al in G can b e translated to b G such that Theorem 5 remains v alid for the resulting netw orks. As already exploited in Section 6.2, removing an arc of G corresp onds to removing the same arc in b G . How ev er, vertex remov al cannot b e translated in such a direct w ay as the arcs in b E \ E are auxiliary arcs which should not b e remov ed by a vertex remov al. F or any interdiction set R ⊂ V ∪ E , w e denote by b G ( R ) the graph obtained from b G by removing all arcs con tained in R and all arcs in E b eing adjacen t to a vertex in R . W e hav e the following relation. Theorem 7. F or any inter diction set R of G we have the fol lowing e quivalenc e. Ther e is a satur ating flow in G \ R ⇔ ther e is a cir culation in b G ( R ) . Pr o of. Let G ( R ) b e the netw ork obtained from G by removing all arcs in R and all arcs adjacent to vertices in R . W e trivially hav e that there is a saturating flow in G \ R if and only if there is a saturating flo w in G ( R ). The netw ork b G ( R ) can easily b e obtained from G ( R ) by applying the construction introduced in Section 6.1. Applying Theorem 5 prov es finally the claim. By a classical c haracterization for feasibility of circulation problems (see [1]) the following theorem follows. Theorem 8. F or any inter diction set R in G we have: Ther e exists no cir culation in b G ( R ) ⇔ ther e exists a cut in b G ( R ) with value < 0 . F urthermore, as the arcs con tained in a cut can be partitioned in groups of arcs corresp onding to elemen tary cuts, w e ha ve that there is a cut in b G ( R ) with v alue strictly less than zero exactly when there is an elemen tary cut in b G ( R ) with v alue strictly less than zero. In the following, we show ho w the problem of finding an in terdiction set R and an elementary cut in b G ( R ) with negative v alue can b e mapp ed onto a mo dified dual net work of G . Let e G ∗ = ( e V ∗ , e E ∗ , e λ ∗ , e c ∗ ) b e the mo dified dual netw ork for the netw ork b G as introduced in Section 5 8 . Analogously as in Section 5, we use the notations e V ∗ = V ∪ b V ∗ and e E ∗ = b E ∗ ∪ g E V . W e asso ciate with every circuit e C ∈ e G a mo dified reduced length e γ ∗ B ( e C ) defined as follows. Let V I e C ∗ ⊂ V b e all the vertices of V which are surrounded in counterclockwise sense by the circuit e C ∗ in the graph e G ∗ and let V e C ∗ ⊂ V I e C ∗ b e the vertices of V on the circuit e C ∗ . T + e C ∗ resp ectiv ely T − e C ∗ denote the set of arcs in T going out resp ectively en tering the set V I e C ∗ in b G and b eing adjacent to one of the vertices in V e C ∗ , i.e., T + e C ∗ = T ∩ ω + b G ( V I e C ∗ ) ∩ ω + b G ( V e C ∗ ) , T − e C ∗ = T ∩ ω − b G ( V I e C ∗ ) ∩ ω − b G ( V e C ∗ ) . W e finally define e γ ∗ B ( e C ∗ ) = e λ ∗ B ( e C ∗ ) + b u ( T + e C ∗ ) − b l ( T − e C ∗ ) . (1) The following theorem shows how the adapted reduced cost can b e used to reformulate the interdiction problem. Theorem 9. L et B b e a fixe d budget. The fol lowing statements ar e e quivalent. i) Ther e exists an inter diction set R in b G such that ther e exists an elementary cut [ V 0 , V \ V 0 ] in b G ( R ) with ν b G ( R ) ([ V 0 , V \ V 0 ]) < 0 . ii) Ther e exists a cir cuit e C ∗ in e G ∗ with e γ ∗ B ( e C ∗ ) < 0 . 8 Using the notation e b G ∗ instead of e G ∗ would b e more consistent. T o simplify notations we c hose the second form. 12 Pr o of. Let R b e an interdiction set in b G and [ V 0 , V \ V 0 ] b e an elementary cut in b G ( R ) with strictly negative v alue. W e partition the set R into R = V R ∪ b E R with V R = R ∩ V and b E R = R ∩ b E . Let U + = T ∩ ω + b G ( V 0 ) ∩ ω + b G ( V R ) resp ectively U − = T ∩ ω − b G ( V 0 ) ∩ ω − b G ( V R ) the subset of arcs in T going out resp ectively entering into the set V 0 and b eing adjacent to vertices in V R . F urthermore let W = ω + b G \ R ( V 0 \ R ). The v alue of the cut [ V 0 , V \ V 0 ] in b G ( R ) can b e rewritten in the following wa y . ν b G ( R ) ([ V 0 , V \ V 0 ]) = b u ( W ) + b u ( U + ) − b l ( U − ) Notice that in the netw ork b G \ ( R ∪ W ), there is no path from V 0 to v ertices in V \ V 0 . This implies that we can find a counterclockwise circuit e C ∗ in e G ∗ consisting only of dual arcs of arcs in b E R ∪ W and of arcs b eing adjacen t to vertices in V R . Such a circuit furthermore satisfies V I e C ∗ = V 0 . This im plies U + = T + e C ∗ and U − = T − e C ∗ . By a reasoning identical to the one in Section 5 w e hav e e λ ∗ B ( e C ∗ ) ≤ b u ( W ) implying finally e γ ∗ B ( e C ∗ ) ≤ ν b G ( R ) ([ V 0 , V \ V 0 ]) < 0. Con versely let e C ∗ b e a circuit in e G ∗ with e γ ∗ B ( e C ∗ ) < 0. W e will show ho w to find an interdiction set R and a cut [ V 0 , V \ V 0 ] in b G ( R ) with ν b G ( R ) ([ V 0 , V \ V 0 ]) < 0. The existence of such a cut implies directly the existence of an elementary cut satisfying the claim. W e set V 0 = V I e C ∗ and V R = V e C ∗ . As b efore by defining U + = T ∩ ω + b G ( V 0 ) ∩ ω + b G ( V R ) and U − = T ∩ ω − b G ( V 0 ) ∩ ω − b G ( V R ) we ha ve U + = T + e C ∗ and U − = T − e C ∗ . Let b E ∗ e C ∗ ⊂ b E ∗ b e the subset of all arcs in b E ∗ whic h are contained in the circuit e C ∗ , this corresp onds to the set of all arcs in e C ∗ that are not adjacen t to a vertex in V R . F urthermore we define b E e C ∗ = { b e ∈ b E | b e D ∈ b E ∗ e C ∗ } . The minimal v alue of the cut [ V 0 , V \ V 0 ] in b G ( R ) with resp ect to the interdiction set R can b e reformulated as follows. min R ⊂ V ∪ b E : b c ( R ) ≤ B ν b G ( R ) ([ V 0 , V \ V 0 ]) ≤ min b E R ⊂ b E : b c ( b E R ) ≤ B − b c ( V R ) ν b G ( V R ∪ b E R ) ([ V 0 , V \ V 0 ]) = ν b G B − b c ( V R ) ( E e C ∗ ) + b u ( U + ) − b l ( U − ) = e λ ∗ B − b c ( V R ) ( b E ∗ e C ∗ ) + b u ( U + ) − b l ( U − ) (2) Note that w e hav e furthermore e λ ∗ B − b c ( V R ) ( b E ∗ e C ∗ ) = e λ ∗ B ( e C ). This comes from the facts that all arcs e e ∗ ∈ e C ∗ \ e E ∗ e C ∗ satisfy e λ ∗ ( e e ∗ ) = ∞ and th us hav e to b e in terdicted in the calculation of e λ ∗ B ( e C ) and that e c ∗ ( e C ∗ \ e E ∗ e C ∗ ) = c ( V R ) as already seen in Section 5. F urther developing Equation 2 by using this relation, the definition of e γ ∗ B and U + = T + e C ∗ , U − = T − e C ∗ w e finally get min R ⊂ V ∪ b E : b c ( R ) ≤ B ν b G ( R ) ([ V 0 , V \ V 0 ]) ≤ e γ ∗ B ( e C ∗ ) < 0 pro ving the claim. In the next step, we in tro duce a new length function e χ ∗ : E ∗ → Z ∪ {∞} , which is a slight adaption of e λ ∗ and satisfies e χ ∗ B ( e C ∗ ) = e γ ∗ B ( e C ∗ ) for every circuit e C ∗ in e G ∗ , where e χ ∗ B is the reduced length with resp ect to e χ ∗ and the budget B . Such a length function allo ws us to solve the netw ork security problem on G as in the previous sections by lo oking for a circuit in e G ∗ with negativ e reduced length with resp ect to e χ ∗ . Let e C ∗ b e a circuit in e G ∗ . F or ev ery arc e e ∗ ∈ b E ∗ w e set e χ ∗ ( e e ∗ ) = e λ ∗ ( e e ∗ ). The v alue of e χ ∗ on the arcs in e E V will b e defined such that for each circuit e C ∗ in e G ∗ and each vertex v ∈ V the following equality will b e satisfied. e χ ∗ ( e C ∗ ∩ ω e G ∗ ( v )) = e λ ∗ ( e C ∗ ∩ ω e G ∗ ( v )) + b u ( T + e C ∗ ∩ ω e G ∗ ( v )) − b l ( T − e C ∗ ∩ ω e G ∗ ( v )) (3) Summing the ab o ve equation o ver all v ertices on the circuit e C ∗ giv es e χ ∗ ( e C ∗ ∩ e E V ) = e λ ∗ ( e C ∗ ∩ e E V ) + b u ( T + e C ∗ ) − b l ( T − e C ∗ ), which implies the desired prop erty e χ ∗ B ( e C ∗ ) = e γ ∗ B ( e C ∗ ) ∀ e C ∗ circuit in e G ∗ . In the following, we define e χ ∗ on the arcs e E V in suc h a wa y that Equation 3 is satisfied. F or all arcs b e ∗ ∈ e E V adjacen t to a vertex in S ∪ T we set e χ ∗ ( e e ∗ ) = e λ ∗ ( e e ∗ ) = ∞ . This ensures that Equation 3 is satisfied for all v ∈ S ∪ T . Let v ∈ V \ ( S ∪ T ), T + ( v ) b e all arcs in T going out of v , T − v b e all arcs in T en tering v , T ( v ) = T + v ∪ T − v and let e E V v b e the set of all arcs in e E V adjacen t to v . F urthermore, 13 let e e ∗ v b e an arbitrary fixed arc in e E V v . W e denote by H the (geometric) graph ( e V ∗ , e E ∗ ∪ T ) obtained by adding the arcs T to the planar graph ( e V ∗ , e E ∗ ). F or e e ∗ 1 , e e ∗ 2 ∈ e E V v , w e define T v ( e e ∗ 1 , e e ∗ 2 ) to b e the set of all arcs in T v that are tra versed in H when going in coun terclo ckwise sense from e e ∗ 1 around v to e e ∗ 2 . F urthermore, let T + v ( e e ∗ 1 , e e ∗ 2 ) resp ectively T − v ( e e ∗ 1 , e e ∗ 2 ) b e the arcs in T v ( e e ∗ 1 , e e ∗ 2 ), that are entering resp ectively going out of v . T o simplify notations, we define α ( e e ∗ 1 , e e ∗ 2 ) = b u ( T + v ( e e ∗ 1 , e e ∗ 2 )) − b l ( T − v ( e e ∗ 1 , e e ∗ 2 )). Finally we define for e e ∗ ∈ e E V v e χ ∗ ( e e ∗ ) = ( e λ ∗ ( e e ∗ ) + α ( e e ∗ , e e ∗ v ) if e e ∗ en ters v e λ ∗ ( e e ∗ ) − α ( e e ∗ , e e ∗ v ) if e e ∗ lea ves v . Let e C ∗ b e a circuit in e G ∗ and v ∈ V a vertex though which e C ∗ passes. W e denote by e e ∗ in resp ectiv ely e e ∗ out the incoming and outgoing arc of e C ∗ with resp ect to the vertex v . Using the introduced notation, Equation 3 can b e rewritten as e χ ∗ ( e e ∗ in ) + e χ ∗ ( e e ∗ out ) = e λ ∗ ( e e ∗ in ) + e λ ∗ ( e e ∗ out ) + α ( e e ∗ in , e e ∗ out ) . (3 0 ) Applying furthermore the definition of e χ ∗ in Equation 3 0 , w e finally ha v e to pro v e the follo wing proposition. Prop osition 2. α ( e e ∗ in , e e ∗ v ) − α ( e e ∗ out , e e ∗ v ) = α ( e e ∗ in , e e ∗ out ) Pr o of. W e distinguish tw o cases describing tw o p ossible constellations of the arcs e e ∗ v , e e ∗ in , e e ∗ out around the v ertex v . When going in counterclockwise sense around v b eginning at e e ∗ in , these arcs are either encountered in the order ( e e ∗ in , e e ∗ out , e e ∗ v ) or ( e e ∗ in , e e ∗ v , e e ∗ out ). Case 1: ( e e ∗ in , e e ∗ out , e e ∗ v ) The result follows immediately by the definition of α and the relations b u ( T + v ( e e ∗ in , e e ∗ out )) + b u ( T + v ( e e ∗ out , e e ∗ v )) = b u ( T + v ( e e ∗ in , e e ∗ v )) b l ( T − v ( e e ∗ in , e e ∗ out )) + b l ( T − v ( e e ∗ out , e e ∗ v )) = b l ( T − v ( e e ∗ in , e e ∗ v )) . Case 2: ( e e ∗ in , e e ∗ v , e e ∗ out ) With the same reasoning as in the first case we get α ( e e ∗ in , e e ∗ out ) − α ( e e ∗ in , e e ∗ v ) = α ( e e ∗ v , e e ∗ out ) . The prop osition th us reduces to α ( e e ∗ v , e e ∗ out ) = − α ( e e ∗ out , e e ∗ v ), which follows by observing that by construction of T and the fact that v 6∈ S ∪ T we hav e b u ( T + v ) − b l ( T − v ) = 0 . The net work security problem on G can th us b e solved as in Section 6.2 by lo oking for a circuit e C ∗ in e G ∗ with negativ e reduced length with respe ct to e χ ∗ . If and only if such a circuit exists, it is p ossible to diminish the v alue of a maximum flow in the netw ork G by at least one unit giv en the budget B . It follo ws from the pro of of Theorem 9 that in this case, an interdiction strategy can b e found in the same wa y as in presen ted in Section 5. As the net work e G used in this section is only at most a constan t factor larger than the auxiliary netw ork used in Section 6.2, the algorithm can b e implemented with a running time of O ( B n 3 ) or, b y reversing the roles of budget and length, with a running time of O ( ν max B ( G ) n 3 ). Here, to o, w e exp ect that the running time can b e improv ed by exploiting more deeply the structure of the netw ork e G in the dynamic programming steps. 7 Conclusions W e prop osed a planarit y-preserving transformation that allo ws to incorporate vertex remov als and v ertex capacities in pseudo-polynomial in terdiction algorithms for planar graphs. Additionally , a pseudo-p olynomial algorithm was introduced for the problem of determining the minimum in terdiction budget needed to make 14 it imp ossible to satisfy the demand of all sink no des. The algorithm w orks on planar net works with m ultiple sources and sinks where the sum of the supplies at the source no des equals the sum of the demands at the sink no des. How ev er this algorithm do es not seem to extend easily to general net work interdiction problems with multiple sources and sinks. Th us, it is still not known whether netw ork flow interdiction on planar graphs with multiple sources and sinks is solv able in pseudo-p olynomial time. W e show ed that the k -densest subgraph problem on planar graphs can b e p olynomially reduced to a netw ork flow in terdiction problem on a planar graph with m ultiple sources and sinks. The algorithms presen ted in this pap er can easily be adapted to the case when m ultiple resources are needed for remo ving arcs and no des, still remaining pseudo-p olynomial. The main purp ose of the algorithms presen ted in this paper, was to sho w that v arious in terdiction problems on planar graphs can b e solved in pseudo-p olynomial time. W e exp ect how ever, that it should b e p ossible to sp eed up the prop osed algorithms by using more e lab orate techniques as for example nested dissection. F urthermore, it w ould b e in teresting to extend the presented w ork to nearly planar netw orks as for example net works with a b ounded crossing num b er or genus. References [1] R. K. Ahuja, T. L. Magnanti, and J. B. Orlin. Network flows: the ory, algorithms, and applic ations . Pren tice-Hall, Inc., Upp er Saddle River, NJ, USA, 1993. [2] N. Assimakopoulos. A netw ork in terdiction mo del for hospital infection control. Computers in biolo gy and me dicine , 17(6):413–422, 1987. [3] C. Burc h, R. Carr, S. Krumk e, M. Marathe, C. Phillips, and E. Sundb erg. Network inter diction and sto chastic inte ger pr o gr amming , volume 22, chapter 3, pages 51–68. Springer, 2003. A decomp osition- based pseudoappro ximation algorithm for netw ork flow inhibition. [4] D. G. Corneil and Y. P erl. Clustering and domination in p erfect graphs. Discr ete Applie d Mathematics , 9:27–29, 1984. [5] J. F ak charoenphol. Planar graphs, negativ e weigh t edges, shortest paths, and near linear time. In F OCS ’01: Pr o c e e dings of the 42nd IEEE symp osium on F oundations of Computer Scienc e , page 232, W ashington, DC, USA, 2001. IEEE Computer So ciety . [6] L. R. F ord and D. R. F ulkerson. Maximal flow through a netw ork. Canadian Journal of Mathematics , 8:399–404, 1956. [7] M. R. Garey and D. S. Johnson. Computers and Intr actability; A Guide to the The ory of NP- Completeness . W. H. F reeman & Co., New Y ork, NY, USA, 1990. [8] P . M. Ghare, D. C. Montgomery , and W. C. T urner. Optimal interdiction p olicy for a flow netw ork. Naval R ese ar ch L o gistics Quarterly , 18:37–45, 1971. [9] J. M. Keil and T. B. Brec ht. The complexity of clustering in planar graphs. J. Combinatorial Mathematics and Combinatorial Computing , 9:155–159, 1991. [10] S. Khuller and J. Naor. Flow in planar graphs with vertex capacities. Algorithmic a , 11(3):200–225, 1994. [11] B. Korte and J. Vygen. Combinatorial Optimization, The ory and Algorithms . Springer, 3 edition, 2006. [12] E. L. Lawler. Combinatorial Optimization: Networks and Matr oids . Holt, Rinehart and Winston, 1976. [13] A. W. McMasters and T. M. Mustin. Optimal interdiction of a supply net work. Naval R ese ar ch L o gistics Quarterly , 17(3):261–268, 1970. [14] G. L. Miller and J. Naor. Flow in planar graphs with multiple sources and sinks. SIAM J. Comput. , 24(5):1002–1017, 1995. [15] C. A. Phillips. The netw ork inhibition problem. In STOC ’93: Pr o c e e dings of the twenty-fifth annual A CM symp osium on The ory of c omputing , pages 776–785, New Y ork, NY, USA, 1993. ACM Press. 15 [16] H. D. Ratliff, G. T. Sicilia, and S. H. Lub ore. Finding the n most vital links in flow netw orks. Management Scienc e , 21(5):531–539, 1975. [17] J. Salmeron, K. W o o d, and R. Baldick. Analysis of electric grid security under terrorist thread. IEEE T r ansaction on Power Systems , 19(2):905–912, 2004. [18] R. W ollmer. Removing arcs from a netw ork. Op er ations R ese ar ch , 12(6):934–940, 1964. [19] R. K. W o o d. Deterministic netw ork in terdiction. Mathematic al and Computer Mo deling , 17(2):1–18, 1993. 16
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment