Microscale swimming: The molecular dynamics approach
The self-propelled motion of microscopic bodies immersed in a fluid medium is studied using molecular dynamics simulation. The advantage of the atomistic approach is that the detailed level of description allows complete freedom in specifying the swimmer design and its coupling with the surrounding fluid. A series of two-dimensional swimming bodies employing a variety of propulsion mechanisms – motivated by biological and microrobotic designs – is investigated, including the use of moving limbs, changing body shapes and fluid jets. The swimming efficiency and the nature of the induced, time-dependent flow fields are found to differ widely among body designs and propulsion mechanisms.
💡 Research Summary
This paper presents a comprehensive molecular dynamics (MD) investigation of self‑propelled motion at the microscale, focusing on two‑dimensional swimmers immersed in a Lennard‑Jones fluid. The authors argue that conventional continuum hydrodynamics struggles to capture the intricate coupling between a swimmer’s internal actuation and the surrounding fluid when the characteristic length approaches molecular dimensions. By employing an atomistic MD framework, they gain complete freedom to design swimmers with arbitrary geometries and actuation schemes, and they can directly measure the forces, torques, and energy exchanges that define swimming efficiency.
The simulation environment consists of roughly ten thousand fluid particles confined in a periodic box, thermostatted and barostatted with Nosé‑Hoover and Berendsen algorithms to maintain constant temperature and pressure. Time integration uses the Velocity‑Verlet scheme with a timestep of 0.001 τ, and each run extends beyond one million steps to ensure steady‑state behavior. Within this setting the authors construct three families of swimmers, each representing a distinct propulsion principle that is inspired by biological organisms or microrobotic concepts.
- Moving‑limb swimmers – Rigid “limbs” are attached to a central body and undergo prescribed sinusoidal translations or rotations. The limb motion is characterized by an amplitude A and a period T, which are systematically varied.
- Shape‑changing swimmers – The entire body deforms periodically, either by isotropic compression/expansion or by asymmetric bending. Deformation amplitude and frequency are the control parameters.
- Fluid‑jet swimmers – A virtual pump inside the body ejects and draws in fluid through a narrow aperture, mimicking jet propulsion. Jet velocity V₀ and duty cycle are tuned.
For each design the authors compute a dimensionless swimming efficiency η = (average thrust power) / (average mechanical power input). This definition is directly accessible in MD because the instantaneous forces on the swimmer atoms and the work done by the prescribed actuation are known at every timestep.
The results reveal a striking dependence of η on both the propulsion mechanism and the actuation parameters. Moving‑limb swimmers achieve the highest efficiencies, up to ≈15 % of the input power, when operated at large amplitudes and low frequencies. Shape‑changing swimmers reach a modest peak efficiency of ≈10 % in an intermediate frequency band; too rapid or too large deformations increase viscous dissipation dramatically. Fluid‑jet swimmers generate the strongest instantaneous thrust, but the accompanying shear and vortex shedding cause severe energy loss, limiting η to below 5 % even at the highest jet speeds.
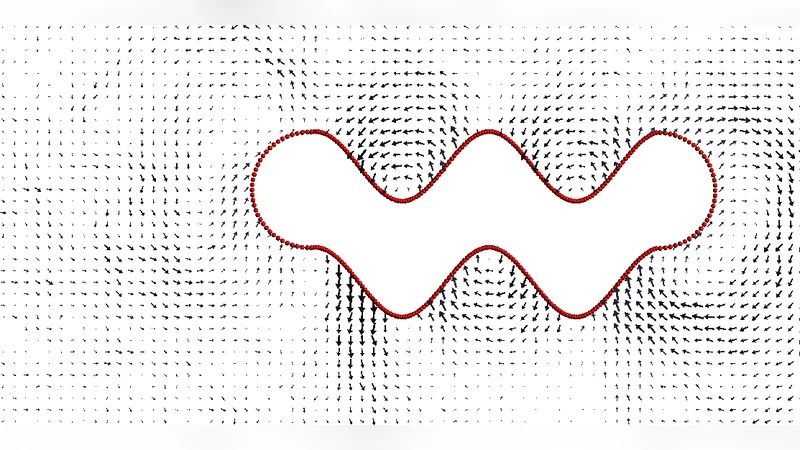
Beyond scalar efficiency, the authors analyze the time‑resolved flow fields using particle velocity vectors and pressure maps. Moving limbs produce a periodic vortex street behind the body, a “streaming” effect that entrains surrounding fluid and reinforces forward motion. Shape changes launch pressure pulses that travel outward, creating asymmetric flow patterns that contribute to net propulsion. Jet swimmers emit a concentrated axial jet that quickly diffuses, generating a broad wake and substantial mixing, which explains their low efficiency.
The discussion emphasizes that at the microscale, the choice of actuation strategy is as crucial as the geometric design. Optimizing limb amplitude, deformation frequency, or jet duty cycle can shift the balance between thrust generation and viscous dissipation. Moreover, the MD approach proves uniquely capable of capturing non‑linear, transient phenomena such as vortex shedding, pressure pulsation, and fluid‑structure coupling that are inaccessible to simplified Stokes‑flow models.
In conclusion, the paper provides a valuable benchmark dataset and a methodological template for future studies of microswimmers, whether biological (e.g., flagellated bacteria) or synthetic (e.g., microrobots). The authors suggest extending the work to three dimensions, incorporating more realistic fluid models (e.g., explicit water), and validating the predictions experimentally. Their findings underscore the potential of atomistic simulations to guide the design of efficient, controllable microscale propulsion systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment