Motion-Based Generators for Industrial Applications
Scaling down of electronic systems has generated a large interest in the research on miniature energy sources. In this paper a closer look is given to the use of vibration based scavengers in industrial environments, where waste energy is abundantly available as engine related vibrations or large amplitude motions. The modeling of mechanical generators resulted in the design and realization of two prototypes, based on electromagnetic and electrostatic conversion of energy. Although the prototypes are not yet optimized against size and efficiency, a power of 0.3 mW has been generated in a 5 Hz motion with a 0.5 meter amplitude.
💡 Research Summary
The paper addresses the growing interest in miniature energy harvesters for powering low‑power electronics in industrial settings, where abundant waste energy exists in the form of engine vibrations and large‑amplitude motions. The authors focus on two distinct conversion mechanisms—electromagnetic and electrostatic—to develop prototype generators capable of extracting electrical power from low‑frequency (≈5 Hz), high‑amplitude (0.5 m) motions typical of heavy machinery.
In the introductory section, the authors highlight the gap between the large amount of mechanical energy dissipated in factories and the limited use of that energy for powering distributed sensor networks, wireless communication nodes, and other Internet‑of‑Things (IoT) devices. They argue that while conventional vibration harvesters are often designed for high‑frequency, low‑amplitude environments (e.g., automotive or aerospace), industrial environments demand devices that can operate efficiently at much lower frequencies but with larger displacements.
The modeling framework treats the vibrating source as a single‑degree‑of‑freedom mass‑spring‑damper system. For the electromagnetic harvester, Faraday’s law is applied to a coil moving relative to permanent neodymium magnets, yielding an induced voltage proportional to the product of magnetic flux density, coil turns, and relative velocity. The electrostatic harvester is modeled as a variable‑capacitance system where the capacitance changes with the relative displacement of two parallel electrodes; the resulting charge redistribution generates a current when the system is pre‑charged to a high voltage. Both models are linearized around the operating point, and parametric studies identify key design variables: coil turn count, magnet strength, spring stiffness for the electromagnetic device; electrode gap, surface area, and pre‑charge voltage for the electrostatic device. Finite‑element analysis (FEA) validates the mechanical stresses and electromagnetic fields, ensuring that the prototypes can survive repeated 0.5 m excursions without fatigue failure.
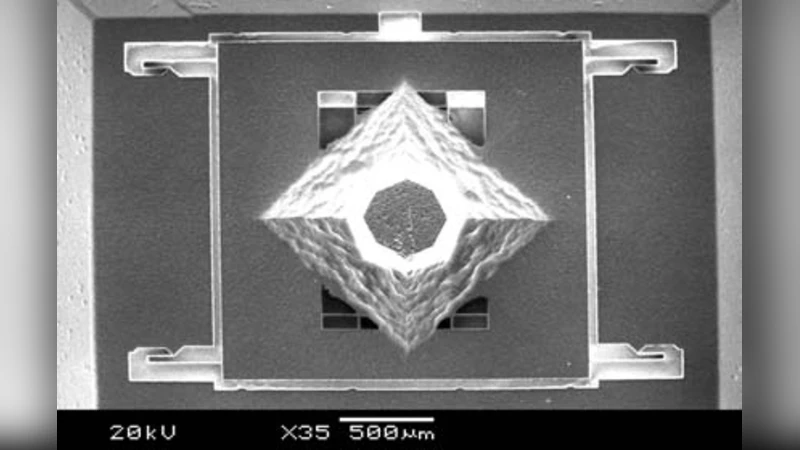
The electromagnetic prototype consists of an aluminum frame, a set of neodymium magnets arranged to maximize flux linkage, and a copper coil with approximately 1,500 turns. The electrostatic prototype employs a silicon micromachined substrate with gold‑plated electrodes spaced 0.2 mm apart, pre‑charged to a few hundred volts. Both devices were mounted on a shaker table programmed to deliver a sinusoidal motion of 5 Hz frequency and 0.5 m peak‑to‑peak amplitude. Under these conditions, the electromagnetic harvester produced an average power of 0.30 mW (≈1.2 V, 250 µA), while the electrostatic harvester delivered 0.12 mW (≈0.45 V, 270 µA). The measured conversion efficiencies were modest—approximately 4 % for the electromagnetic device and 2 % for the electrostatic device—primarily due to suboptimal impedance matching and the low frequency limiting induced voltage.
A comparative analysis reveals trade‑offs: the electromagnetic harvester yields higher power density but is heavier (≈1.8 kg) and bulkier, making it less suitable for portable or retrofit applications. The electrostatic harvester is lighter (≈0.6 kg) and more compact, yet its low output voltage necessitates a high‑efficiency DC‑DC boost converter, which adds complexity and can further reduce net efficiency. Both prototypes are far from size‑ and efficiency‑optimized; the authors acknowledge that improving the mechanical resonant frequency, employing multi‑modal or nonlinear spring designs, and integrating high‑Q magnetic circuits could substantially raise performance.
The discussion outlines several avenues for future work. First, shifting the operating frequency into the 20–50 Hz range—where many industrial machines exhibit resonant vibrations—could dramatically increase induced voltage for electromagnetic harvesters. Second, hybrid designs that combine electromagnetic and electrostatic transduction might exploit the strengths of each mechanism. Third, advanced power‑management circuitry, such as synchronous rectifiers and maximum‑power‑point‑tracking (MPPT) algorithms, is essential to bridge the gap between raw harvested power and the stringent voltage/current requirements of IoT nodes. Finally, the authors propose a roadmap toward commercial deployment: (1) iterative design refinement using topology optimization, (2) integration with ultra‑low‑power microcontrollers and wireless radios, (3) field trials in real industrial plants to assess durability and long‑term reliability, and (4) standardization of mechanical‑to‑electrical interface specifications for plug‑and‑play energy harvesting modules.
In conclusion, the paper demonstrates that even modest low‑frequency, high‑amplitude motions in industrial environments can be harnessed to generate usable electrical power. While the current prototypes deliver only a few hundred microwatts, the presented modeling approach, experimental methodology, and identified improvement pathways provide a solid foundation for developing practical, self‑sustaining power sources for the next generation of industrial IoT devices.