Some notes on the equivalence of first-order rigidity in various geometries
These pages serve two purposes. First, they are notes to accompany the talk “Hyperbolic and projective geometry in constraint programming for CAD” by Walter Whiteley at the “Janos Bolyai Conference on Hyperbolic Geometry”, 8–12 July 2002, in Budapest, Hungary. Second, they sketch results that will be included in a forthcoming paper that will present the equivalence of the first-order rigidity theories of bar-and-joint frameworks in various geometries, including Euclidean, hyperbolic and spherical geometry. The bulk of the theory is outlined here, with remarks and comments alluding to other results that will make the final version of the paper.
💡 Research Summary
This paper presents a unified treatment of first‑order (infinitesimal) rigidity for bar‑and‑joint frameworks across three fundamental geometries: Euclidean, hyperbolic, and spherical. The author’s motivation stems from a talk given at the 2002 János Bolyai Conference on Hyperbolic Geometry, where the need to handle constraints in non‑Euclidean spaces for computer‑aided design (CAD) was highlighted. The manuscript serves as a detailed set of notes that outline the main results which will appear in a forthcoming full‑length article.
The central objects of study are frameworks defined by a graph (G=(V,E)) together with a placement of the vertices in a chosen geometry. For each edge ((i,j)) a distance constraint (|x_i-x_j|g = \ell{ij}) is imposed, where (g) denotes the metric of the underlying space (Euclidean, hyperbolic, or spherical). An infinitesimal motion assigns a velocity vector (v_i) to each vertex and requires that the first‑order variation of every edge length vanish. This yields the linear equations ((x_i-x_j)\cdot_g (v_i-v_j)=0) for all edges.
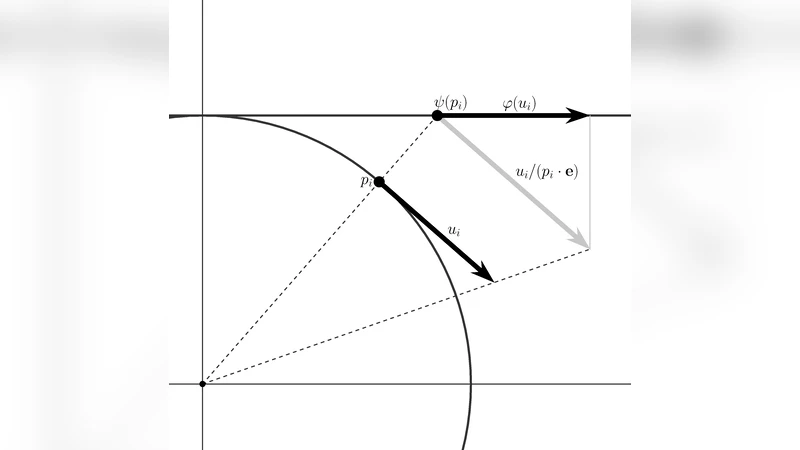
The key insight is that all three geometries can be embedded into a common projective space (\mathbb{P}^n) using appropriate homogeneous coordinates: Euclidean points become ((x,1)), hyperbolic points are represented in the Lorentz model as ((x,\sqrt{1+|x|^2})), and spherical points are mapped by stereographic projection to ((x,\sqrt{1-|x|^2})). Under these embeddings the metric inner products (\cdot_g) are transformed into the standard Euclidean inner product on (\mathbb{R}^{n+1}). Consequently, the infinitesimal rigidity equations for all three geometries collapse to a single linear system \
Comments & Academic Discussion
Loading comments...
Leave a Comment