Mobile robots require basic information to navigate through an environment: they need to know where they are (localization) and they need to know where they are going. For the latter, robots need a map of the environment. Using sensors of a variety of forms, robots gather information as they move through an environment in order to build a map. In this paper we present a novel sampling algorithm to solving the simultaneous mapping and localization (SLAM) problem in indoor environments. We approach the problem from a Bayesian statistics perspective. The data correspond to a set of range finder and odometer measurements, obtained at discrete time instants. We focus on the estimation of the posterior distribution over the space of possible maps given the data. By exploiting different factorizations of this distribution, we derive three sampling algorithms based on importance sampling. We illustrate the results of our approach by testing the algorithms with two real data sets obtained through robot navigation inside office buildings at Carnegie Mellon University and the Pontificia Universidad Catolica de Chile.
Deep Dive into A statistical approach to simultaneous mapping and localization for mobile robots.
Mobile robots require basic information to navigate through an environment: they need to know where they are (localization) and they need to know where they are going. For the latter, robots need a map of the environment. Using sensors of a variety of forms, robots gather information as they move through an environment in order to build a map. In this paper we present a novel sampling algorithm to solving the simultaneous mapping and localization (SLAM) problem in indoor environments. We approach the problem from a Bayesian statistics perspective. The data correspond to a set of range finder and odometer measurements, obtained at discrete time instants. We focus on the estimation of the posterior distribution over the space of possible maps given the data. By exploiting different factorizations of this distribution, we derive three sampling algorithms based on importance sampling. We illustrate the results of our approach by testing the algorithms with two real data sets obtained throu
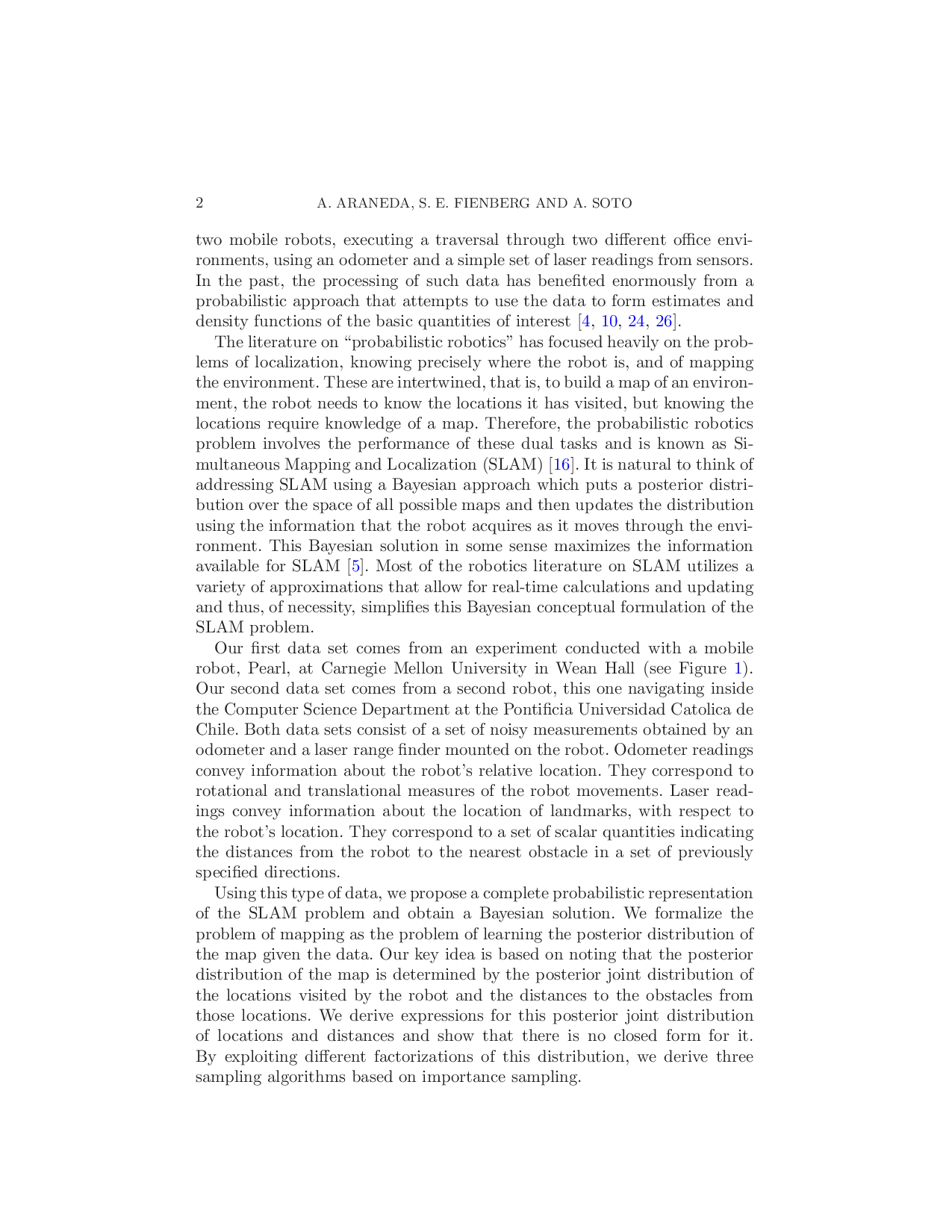
1. Introduction. Mobile robots require basic information to navigate through an environment: they need to know where they are (localization) and they need to know where they are going. For the latter, robots need a map of the environment. Using sensors of a variety of forms, robots gather information as they move through an environment in order to build a map. There are many algorithmic approaches to deal with this problem; for example, see the discussion in [4]. In this paper we examine data gathered by The outline of the paper is as follows. In Section 2 we discuss previous research in SLAM and compare this literature with our approach. In Section 3 we describe in detail the dependencies and models that define our probabilistic approach. In Section 4 we explore the posterior distribution of maps and develop three sampling algorithms. In Section 5 we apply these algorithms to the data sets collected in Wean Hall Building at Carnegie Mellon University, and in the Computer Science Department at the Pontificia Universidad Catolica de Chile. Finally, in Section 6 we discuss briefly extensions of our model and methodology, in order to allow for both real time implementation and more elaborate forms of data input.
Although there is an extensive robotics research literature dealing with mapping or localization for mobile robots (e.g., see [2,8,24,26]) the SLAM problem is a relatively newer research area, where most efforts have been made over the last couple of decades. An important family of approaches to SLAM is based on versions of the Kalman filter. The pioneering development in this area was the paper by Smith et al. [22] which proposed a basic version of the Hidden Markov Model (HMM) approach widely used today, and then used the Kalman filter to address the problem of estimating topological maps. They assumed a fixed number of landmarks in the environment where these landmarks can be identified by their cartesian coordinates. At a fixed point in time, the set of landmarks coordinates and the location of the robot are assumed to be unobservable or latent variables. As in the Kalman filter, the main assumption is that the posterior distributions of all these variables are Gaussian and that the observations, given the latent variables, can be described by a linear function and a white noise term.
These two assumptions, Gaussian variables and linearity, are somewhat restrictive. The Gaussian assumption makes this approach unsuitable for multimodal distributions that arise when the location of the robot is ambiguous. The linearity assumption is not met in general, since the relation between odometry and locations involves trigonometric functions. The Extended Kalman Filter (EKF) [7,15] partially handles nonlinearity using a Taylor series approximation.
For the non-Gaussian case, Thrun et al. [25] outlined a general approach that can be used with general distribution functions. Under this approach, however, maximum likelihood estimation is too expensive computationally. As an alternative, Thrun [24] presented an application of the Expectation-Maximization (EM) algorithm [6] applied to mapping. He treated the map as the parameter to be estimated and the locations as part of an HMM, maximizing the expected log likelihood of the observations and the locations, given the map.
A more recent and successful approach to the SLAM problem is the Fast-SLAM algorithm [17]. This approach applies to topological maps, and is based on a factorization of the posterior distribution of maps and locations. For full details on both the models and their algorithmic implementation, see [18]. The key factorization of maps and locations is not part of the model we present here and should be thought of as an approximation which allows for real-time implementation.
Hähnel et al. [13] present an approach that is also based on the description in [24], but this one applied to occupancy grids. This approach finds locations iteratively over time. At each point in time, the algorithm estimates the location visited by the robot as the location that maximizes the probability of the current data, given past data and previous location estimates. The next step finds the map, as the map that maximizes the posterior probability of the estimated locations and the observed data.
Our mapping approach applies to occupancy grid maps of static environments. Our formulation of the problem is based on the approach initially described in Thrun et al. [25]. We build a graphical representation of that formulation where the locations are considered unobservable variables determining the observed odometer readings and, together with the map, determining the observed laser readings. The probability model for the entire process is determined by motion and perception models and a prior distribution for the map.
In contrast with most of these other approaches, we provide a formal probabilistic description of the entire process and develop a Bayesian solution wit
…(Full text truncated)…
This content is AI-processed based on ArXiv data.