Laplacian comparison for Alexandrov spaces
We consider an infinitesimal version of the Bishop-Gromov relative volume comparison condition as generalized notion of Ricci curvature bounded below for Alexandrov spaces. We prove a Laplacian comparison theorem for Alexandrov spaces under the condi…
Authors: ** Kazuhiro Kuwae, Takashi Shioya **
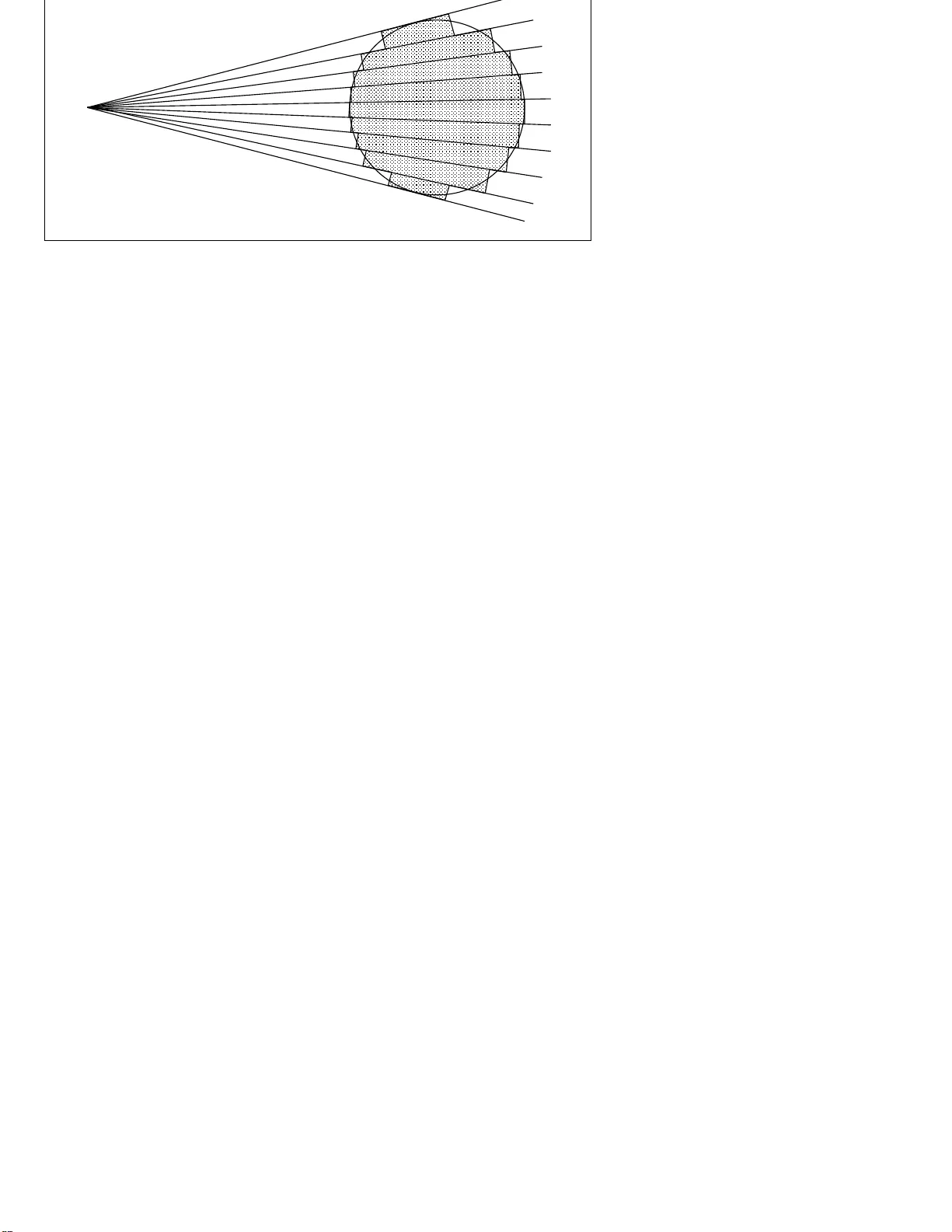
LAPLA CIAN COMP ARISON F OR ALEXANDRO V SP A CES KAZUHIR O KUW AE AND T AK ASHI SHIOY A De d ic ate d to Pr ofessor Karst en Gr ove on the o c c asion of his sixtieth birthday. Abstract. W e consider an infinitesima l version of the Bis ho p- Gromov relative volume co mparison conditio n as generalized no- tion of Ricci curv ature b ounded b elow for Alexandrov spaces. W e prov e a Laplacian co mparison theorem for Alexandrov space s un- der the condition. As an application we prove a top o logical s plit- ting theorem. 1. Introduction In this pap er, w e study singular spaces of Ricci curv ature b ounded b elo w. F or Riemannian manifolds, ha ving a lo w er bound of Ricci cur- v ature is equiv alen t t o an infinitesimal v ersion of the Bishop-G r o mo v v olume comparison condition. Since it is imp ossible to define the Ricci curv ature tensor on Alexandrov spaces, w e consider suc h the v olume comparison condition as a candidate of the conditions of the Ricci cur- v ature b ounded b elo w. In Riemannian geome try , the Laplacian comparison theorem is one of the most imp ortan t to ols to study the structure o f spaces with a low er b ound of Ricci curv ature. A main purp ose of this pap er is to prov e a Laplacian comparison theorem for Alexandro v spaces under the vol- ume comparison condition. As an application, w e pro v e a top ological splitting t heorem of Che eger-Gromoll t yp e. Let us prese n t the v olume comparison condition. F or κ ∈ R , w e set s κ ( r ) := sin( √ κr ) / √ κ if κ > 0 , r if k = 0 , sinh( p | κ | r ) / p | κ | if κ < 0 . The function s κ is the solution of the Jacobi equation s ′′ κ ( r ) + κs κ ( r ) = 0 with initial condition s κ (0) = 0, s ′ κ (0) = 1. Date : Septem b er 6, 2007. 2000 Mathematics Subje ct Classific ation. P r imary 53C20, 53C21 , 53C23 . Key wor ds and phr ases. splitting theor em, Ricci cur v a ture, Bishop-Gromov in- equality , BV functions, Green formula. The authors are partially suppor ted by a Gra n t-in-Aid for Scien tific Resea rch No. 16540 2 01 and 14 54005 6 fr o m the Japan So ciety for the Promotion of Science. 1 Let M b e an Alexandro v space of dimension n ≥ 2. F or p ∈ M and 0 < t ≤ 1, w e define a subse t W p,t ⊂ M and a map Φ p,t : W p,t → M as f o llo ws. x ∈ W p,t if and only if there exis ts y ∈ M suc h that x ∈ py and d ( p, x ) : d ( p, y ) = t : 1, where py is a minimal geo desic from p to y and d the distance function. F or a giv en p o in t x ∈ W p,t suc h a p oin t y is unique and we set Φ p,t ( x ) := y . The Alex andro v conv exit y (cf. § 2.2) implies the Lipsc hitz contin uit y of the map Φ p,t . Let us consider the follo wing. Condition BG( κ ) at a p oint p ∈ M : W e hav e d (Φ p,t ∗ H n )( x ) ≥ t s κ ( t d ( p, x )) n − 1 s κ ( d ( p, x )) n − 1 d H n ( x ) for any x ∈ M and t ∈ ( 0 , 1 ] suc h tha t d ( p, x ) < π / √ κ if κ > 0, where Φ p,t ∗ H n means t he push-fo rw ard b y Φ p,t of the n -dimensional Hausdorff me asure H n on M . If M satisfies BG( κ ) at an y p oin t p ∈ M , w e simply say that M satisfies BG ( κ ) . The condition, BG( κ ), is an infinitesimal v ersion of the Bishop- Gromov inequality . F or a n n -dimensional complete Riemannian mani- fold, BG( κ ) ho lds if and only if the Ricci curv ature satisfies Ric ≥ ( n − 1) κ ( see Theorem 3 .2 of [20] for t he ‘o nly if ’ part). W e see some studies on similar (or same) conditions to BG ( κ ) in [7, 33, 1 5, 16 , 29, 20, 3 8 ] etc. BG( κ ) is sometimes called the Measure Contraction Prop ert y and is w eak er than the curv ature-dimension condition introduced b y Sturm [34, 35 ] and Lott-Villani [17]. An y Alexandro v space of curv ature ≥ κ satisfies BG( κ ). Ho wev er w e do not necessarily assume M to b e of curv ature ≥ κ . F or example, a Gr o mo v-Hausdorff limit of closed n - manifolds of Ric ≥ ( n − 1) κ , sectional curv ature ≥ κ 0 , diameter ≤ D , and v olume ≥ v > 0 is an Alexandro v space with BG( κ ) and of curv a- ture ≥ κ 0 . T o state the Laplacian comparison theorem, w e need some notations and definitions. If M has no b oundary , w e define M ∗ as the set of non- δ - singular p oin ts of M for a num b er δ with 0 < δ ≪ 1 /n . If M has nonempty b oundary , we refer to F act 2.6 b elo w for M ∗ . All the top ological singularities of M are en t ir ely con ta ined in M \ M ∗ and M ∗ has a natural structure o f C ∞ differen tiable manifold. W e hav e a canonical Riemannian metric g on M ∗ whic h is a.e. con tin uous and of lo cally b ounded v ariatio n (lo cally BV for short). See § 2.2 for more details. W e set cot κ ( r ) := s ′ κ ( r ) /s κ ( r ) and r p ( x ) := d ( p, x ) f or p, x ∈ M . The distributional L aplacian ¯ ∆ r p of r p on M ∗ is defined b y the usual form ula : ¯ ∆ r p := − D i ( p | g | g ij ∂ j r ) , on a local c hart of M ∗ , where D i is the distributional deriv ativ e with resp ect to the i th co ordinate. Then, ¯ ∆ r p b ecomes a signed Radon 2 measure on M ∗ (see § 4 ). An main theorem of this pap er is stated as follo ws. Theorem 1.1 (Laplacian Comparison Theorem) . L et M b e an A lexan- dr ov sp ac e of dimension n ≥ 2 . If M s a tisfi e s BG( κ ) a t a p oint p ∈ M , then we have (1.1) d ¯ ∆ r p ≥ − ( n − 1) cot κ ◦ r p d H n on M ∗ \ { p } . Corollary 1.2. If M is an A lexa n dr ov sp ac e of d imension n ≥ 2 and curvatur e ≥ κ , then (1.1) holds for any p ∈ M . Ev en if M is a Riemannian manifold, ¯ ∆ r p is no t absolutely con- tin uous with resp ect to H n on the cut-lo cus of p (see Remark 5.1 0). Differen t from Riemannian, the cut-lo cus of a n Alexandro v space is not necessarily a close d subset. In fa ct, w e ha ve an example o f an Alexan- dro v space for whic h the singular se t and the cut-lo cus are b oth dense in the space (cf. Example (2) in § 0 of [22 ]). The Riemannian metric g on M ∗ is not con tinuous on any singular p oin t and has at most the regularit y of lo cally BV. Therefore, the Laplacian of a C ∞ function do es not b ecome a function, only do es a Radon measure in general. In particular, considering a Laplacian comparison in the barrier sense is meaningless. In this reason, for Theorem 1.1 a standard pro of for Rie- mannian do es not w ork and w e need a more delicate discussion using BV theory . In [26], Petrunin claims that the Laplacian of any λ -semicon v ex func- tion is ≥ − nλ fro m t he study of g r a dien t curv es. This implies Corollary 1.2. Ho we v er we do not kno w the details. After P etrunin, Renesse [36] pro ved Corollary 1.2 in a differen t wa y under some additional condition. Our pro of is based on a differen t idea fro m them. W e do not kno w if the con v erse to Theorem 1.1 is true or not, i.e., if (1.1) implies BG( κ ) at p . F or C ∞ Riemannian manifolds, this is easy to prov e. As an application to Theorem 1.1 w e ha v e Theorem 1.3 (T op ological Splitting Theorem) . If an Alexandr ov sp ac e M s a tisfies BG(0) an d c ontains a str aight line, then M is home omor- phic to N × R for some top olo gic al sp ac e N . W e do not kno w if the isometric splitting in t he theorem is true, i.e., if M is isometric to N × R for some Alexandro v space N . If w e replace ‘BG(0)’ with ‘curv ature ≥ 0’, then the isometric splitting is w ell-kno wn ([19]) as a generalization of the T o p onogo v splitting theorem. F or Rie- mannian manifolds, BG(0) is equiv alen t to Ric ≥ 0 and the isometric splitting was pro v ed by Cheeger-Gromoll [8]. In our case, w e do not ha ve the W e itzen b¨ oc k form ula, so that w e cannot obtain the isometric splitting a t presen t. If the metric of M has enough C ∞ part, w e pro v e the isometric splitting. 3 Corollary 1.4. L et M b e an A lexan dr ov sp ac e. Assume that the sin- gular set of M is close d and the non-si n gular set is an ( inc omplete ) C ∞ Riemannian manifold o f Ric ≥ 0 . If M c ontains a str aight line, then M is isometric to N × R for some Alexandr ov sp ac e N . F or Riemannian orbifolds, Borzellino-Z h u [4 ] pro ve d an isometric splitting t heorem. Corolla ry 1.4 is more general than their result. In our previous pa p er [14 ], w e pro ve d for an Alexandro v space M the existence of the heat k ernel of M and the dis creteness of the sp ectrum of the generator (Laplacian) of the Dir ic hlet energy form on a relat ively compact domain in M . As ano ther application to Theorem 1 .1 , w e hav e the follo wing heat k ernel a nd first eigenv alue comparison r esults, whic h generalize the results of Cheeger-Y au [9] and Che ng [10]. B ( p, r ) denotes the metric ball cen tered at p and o f radius r and M n ( κ ) an n -dimensional complete simply connected space form of cur- v ature κ . Corollary 1.5. L et M b e an n -dimens i o nal Alexandr ov sp ac e whi c h satisfies BG( κ ) at a p oin t p ∈ M , and Ω ⊂ M an op en subset c on- taining B ( p, r ) for a numb er r > 0 . Denote by h t : Ω × Ω → R , t > 0 , the he at kernel on Ω with Dirichlet b oundary c ondition, and by ¯ h t : B ( ¯ p, r ) × B ( ¯ p, r ) → R that on B ( ¯ p, r ) for a p oint ¯ p ∈ M n ( κ ) . Then, for any t > 0 and q ∈ B ( p, r ) we have h t ( p, q ) ≥ ¯ h t ( ¯ p, ¯ q ) , wher e ¯ q ∈ M n ( κ ) is a p oint such that d ( ¯ p, ¯ q ) = d ( p, q ) . Corollary 1.6. L et M b e an n -dimens i o nal Alexandr ov sp ac e whi c h satisfies BG( κ ) at a p oint p ∈ M , and r > 0 a numb er. Denote by λ 1 ( B ( p, r )) the first eigenva l ue of the gener ator ( L aplacian ) of the Dirichlet ene r gy form on B ( p, r ) w ith Diri c hlet b oundary c on d ition, and by λ 1 ( B ( ¯ p, r )) that o n B ( ¯ p, r ) for a p oint ¯ p ∈ M n ( κ ) . Th e n we have λ 1 ( B ( p, r )) ≤ λ 1 ( B ( ¯ p, r )) . Once w e hav e the Laplacian Comparison Theorem (see Corollary 5.11), the pro o fs o f Corollaries 1.5 and 1.6 are the same as of Theorem I I and Corollary 1 of Renesse’s pap er [36]. W e can carefully v erify that the lo cal ( L 1 , 1)-v olume regularity is no t needed in the pro of of Theorem I I of [36]. W e also obtain a Bro wnian motion comparison theorem in the same w ay as in [36]. The detail is omitted here. R emark 1.7 . All the results ab ov e are true ev en in the case where M has non-empt y b oundary . In Corollaries 1.5 and 1.6 , w e implicitly assume the Neumann b oundary condition on the b oundary of M for the heat k ernel and the first eigen v alue. In particular, the results hold for an y con ve x subset of an Alexandro v space. 4 Let us briefly mention the idea of the pro of of Theorem 1.1. One of the imp orta n t steps is to prov e the Green fo rm ula on a region E ⊂ M ∗ with piecewise smo oth boundary: ¯ ∆ r p ( E ) = Z ∂ E h ν E , ∇ r p i d H n − 1 , where ν E is the in w ard normal v ector field along ∂ E o f E (Theorem 4.1). F or the pro of of the Gr een form ula, it is essen tial to pro ve that div g ( h ) Y → div g Y w eakly ∗ as h → 0 (Lemma 4.9), where Y is any C ∞ v ector field on M ∗ , g ( h ) the C ∞ mollifier of the Riemannian metric g on M ∗ , and div g (resp. div g ( h ) ) the distributional div ergence with respect to g (resp. g ( h ) ). Remark that t o o btain this, we need some geometric prop ert y of singularities of M (see the pro ofs of Lemmas 4.8 and 4.9) b esides the BV prop ert y of g . Using the G reen form ula, w e prov e the Laplacian Comparison The- orem, 1.1. Our idea is to approx imate any region E with piecewise smo oth b oundary by the union of finitely man y regions A k , where each A k forms the in tersection of some concen tric annulus cen tered at p o f radii r − k < r + k and a union of minimal geodesics emanating from p . See Figure 1. p Figure 1. Appro ximate E b y S k A k . Set B − k := ∂ B ( p, r − k ) ∩ ∂ A k and B + k := ∂ B ( p, r + k ) ∩ ∂ A k . W e assume that each A k is very thin, i.e., the diameters o f B ± k are ve ry small. W e note that S k ( B − k ∪ B + k ) appro ximates ∂ E and ∂ E has a division corresp onding to { A k } . B ± k are all perp endic ular to ∇ r p and the area of B ± k is close to that of the corresp onding part of ∂ E multiplied b y h ν E , ∇ r p i . Since the cut-lo cus of p could b e v ery complex (e.g. could b e a dense subset), w e need a delicate discussion. Usin g BG( κ ), w e estimate the difference b et we en the areas of B − k and B + k b y the v olume of A k . Summing up this fo r all k , we hav e an estimate of the righ t-hand 5 side of the G reen formula for E b y the v olume of E , that is, ¯ ∆ r p ( E ) ≥ − ( n − 1) sup x ∈ E cot κ ( r p ( x )) H n ( E ) . This implies the L aplacian Comparis on The orem. The organization of this pap er is as follows. In § 2 we prepare Alexan- dro v spaces and BV functions. In § 3 w e prov e some basic prop erties for Condition BG( κ ). In § 4, w e p erform some serious BV calculus on Alexandro v space s and prov e the Green formula. In § 5, w e giv e a pro of of the Laplacian Comparison Theorem, 1.1. In the final sec tion, § 6, w e pro ve Theorem 1.3 following the method of Cheeger-Gromoll [8]. 2. Preliminaries 2.1. Notation. Let θ ( x ) b e some function o f v ariable x ∈ R suc h that θ ( x ) → 0 as x → 0, and θ ( x | y 1 , y 2 , . . . ) some function of v ariable x ∈ R dep ending on y 1 , y 2 , . . . suc h that θ ( x | y 1 , y 2 , . . . ) → 0 as x → 0. W e use them lik e Landau’s sy m b ols. 2.2. Alexandro v spaces and their struct ure. In this section, w e presen t basics fo r Alexandro v spaces. Refer [5, 6, 22, 24] for the details. Let M b e a ge o desic sp ac e , i.e., an y tw o p oints p, q ∈ M can b e joined b y a length-minimizing curv e, called a minimal ge o desic pq . Note that for g iv en p, q ∈ M a minimal geo desic pq is not unique in general. A triangle △ pq r in M means a se t of three p oin t s p, q , r ∈ M ( vertic es ), and of three g eo desics pq , q r , r p ( e dges ). F or a num b er κ ∈ R , a κ - c omp arison triangle of a triangle △ pq r in M is defined to b e a triangle △ ˜ p ˜ q ˜ r in a complete simply connected space form of curv ature κ with the prop ert y that d ( p, q ) = d ( ˜ p, ˜ q ), d ( q , r ) = d ( ˜ q , ˜ r ) , d ( r , p ) = d ( ˜ r, ˜ p ). W e denote b y ˜ ∠ pq r the angle ∠ ˜ p ˜ q ˜ r b et w een ˜ q ˜ p and ˜ q ˜ r a t ˜ q of △ ˜ p ˜ q ˜ r . ˜ ∠ pq r is determined only b y d ( p, q ), d ( q , r ), d ( r , p ), and κ . Definition 2.1 (Alexandro v Con v exit y) . A subse t Ω ⊂ M is said to satisfy the ( κ -) Alexandr ov c onvexity if for a ny t r iangle △ pq r ⊂ Ω, t here exists a κ -comparison tria ngle △ ˜ p ˜ q ˜ r suc h that for an y x ∈ pq , y ∈ pr , ˜ x ∈ ˜ p ˜ q , ˜ y ∈ ˜ p ˜ r with d ( p, x ) = d ( ˜ p, ˜ x ), d ( p, y ) = d ( ˜ p, ˜ y ) w e ha v e d ( x, y ) ≥ d ( ˜ x, ˜ y ) . Definition 2.2 (Lo wer Bound of Curv ature, κ ) . F or a subset Ω ⊂ M , w e denote by κ (Ω) the suprem um of κ ∈ R for whic h Ω satisfies the κ -Alexandro v conv exit y . κ (Ω) ma y be + ∞ or −∞ . F or a p oin t x ∈ M w e set κ ( x ) := sup U κ ( U ), where U runs o ve r all neigh b orho o ds of x . The function κ : M → [ −∞ , + ∞ ] is lo we r semi-con tin uo us. Definition 2.3 (Alexandro v Space) . W e say that M is an Alexandr ov sp ac e if (1) M is a complete geo desic space, (2) κ ( x ) > −∞ fo r any x ∈ M , 6 (3) the Hausdorff dimension of M is finite. An Alex andro v space M is said to b e of curvatur e ≥ κ if κ ( M ) ≥ κ . W e usually assume the connectedness fo r Alexandro v spaces. How ev er, w e agree that a t wo-p oin t space M = { p, q } is an Alexandro v space of curv ature ≥ π 2 /d ( p, q ) 2 . Let M b e an Alexandro v space. Then, M is pr op er , i.e., an y b ounded subset is relativ ely compact. If M is of curv ature ≥ κ > 0, then diam M ≤ π / √ κ and M is compact. By the globalization theorem, for an y b ounded subs et Ω ⊂ M , there exists R > 0 suc h that κ (Ω) ≥ inf x ∈ B (Ω ,R ) κ ( x ) > −∞ , where B (Ω , R ) is the R -neighborho o d of Ω. In particular w e ha v e κ ( M ) = inf x ∈ M κ ( x ) ( ≥ −∞ ) . The Hausdorff dimension of (an y o p en subset of ) M is a non-nega t iv e in teger and coincides with the co v ering dimension. A zero-dimensional Alexandro v space is a one- p oin t or tw o-p oint space. A one-dimensional Alexandro v space is a one-dimensional complete Riemannian manifo ld p ossibly with b oundary . Let n b e the dimension of M a nd assume n ≥ 1. W e take an y p oin t p ∈ M and fix it. Denote by Σ p M the space of directions a t p , and b y K p M t he tangen t cone at p ( see [6]). Σ p M is an ( n − 1)-dimensional compact Alexandro v space of curv ature ≥ 1 and K p M an n -dimensional Alexandro v space of curv ature ≥ 0. If M is a Riemannian manifold, Σ p M and K p M are iden tified respectiv ely with the unit tangen t sphere and the tangen t space. Definition 2. 4 (Singular Poin t, δ -Singular P oin t) . A p oin t p ∈ M is called a singular p oint of M if Σ p M is not isometric to the unit sphere S n − 1 . Let δ > 0. W e say that a p oin t p ∈ M is δ - s ingular if H n − 1 (Σ p M ) ≤ v ol( S n − 1 ) − δ . Let us denote the se t of singular p oin ts of M by S M and the set of δ -singular p oin ts of M by S δ . W e ha v e S M = S δ> 0 S δ . Since the map M ∋ p 7→ H n (Σ p M ) is low er semi-con tinu ous, the δ - singular set S δ is a closed set and so t he singular set S M is a Bo rel set. F or a sufficien tly small δ > 0, an y p oin t in M \ S δ has some Euclidean neighborho o d. F or any geo desic segmen t pq and an y x, y ∈ pq \ { p, q } , Σ x M and Σ y M are isometric to eac h other ([27]). Therefore, a geo desic jo ining t w o p oints in M \ S M is en tirely con tained in M \ S M . Definition 2.5 (Boundary) . The b o undary of an Alexandro v space M is defined inductiv ely . If M is one-dimensional, then M is a complete Riemannian manifold and the b oundary of M is defined as usual. As- sume that M has dimension ≥ 2. A p oin t p ∈ M is a b oundary p oint of M if Σ p M has non-empt y boundary . 7 An y b oundary p o in t of M is a singular p oint. More strong ly , t he b oundary of M is con tained in S δ for a sufficien tly small δ > 0, whic h follo ws from the Morse theory in [23, 25]. The doubling theorem ( § 5 of [23]; 1 3 .2 of [6]) states that if M has non-empt y b oundary , then the double of M (i.e., the g luing of t w o copies of M along their b oundaries) is an Alexandro v space without b oundary and eac h cop y of M is con v ex in the double. Denote b y ˆ S M (resp. ˆ S δ ) the set of singular (resp. δ -singular) p oints of dbl( M ) con tained in M , where w e consider M a s a copy in dbl( M ). W e agree that ˆ S M = S M and ˆ S δ = S δ pro vided M has no b oundary . F act 2.6. F or a n Alexandr ov sp ac e M of dimen s i on n ≥ 2 , we have the fol lowing (1)–(5) . (1) Ther e exists a numb er δ n > 0 dep end ing only on n such that M ∗ := M \ ˆ S δ n is a manifold ( with b oundary ) ([6, 23, 25]) and have a natur al C ∞ differ entiable structur e ( even on the b ound- ary ) ([14]) . (2) The Hausdorff dimen s i on of S M is ≤ n − 1 ([6, 22]) , and that of ˆ S M is ≤ n − 2 ([6]) . (3) We hav e a unique Riemannian metric g on M ∗ \ ˆ S M such that the distanc e function in d uc e d fr om g c oincides with the original one of M ([22 ]) . (4) F or any δ w ith 0 < δ ≤ δ n , ther e exists a C ∞ Riemannian metric g δ on M \ ˆ S δ such that | g − g δ | < θ ( δ | n ) on M ∗ \ ˆ S M ([14]) , wher e θ ( δ | n ) is define d in § 2.1. (5) A C ∞ differ entiable structur e on M ∗ satisfying (4) is unique ([14]) . In this me an i n g, the C ∞ structur e is c anonic al. R emark 2.7 . In [14] we construct a C ∞ structure o nly o n M \ B ( S δ n , ǫ ). Ho wev er this is independent o f ǫ a nd extends to M ∗ . The C ∞ structure is a refineme n t of the structures o f [22, 21, 24]. In part icular, it is compatible with the DC structure of [24]. Note that the metric g is defined only on M ∗ \ ˆ S M and do es not con tinuously extend to an y other p oin t of M . In general the non- singular set M ∗ \ ˆ S M is not a manifold b ecause ˆ S M ma y b e dense in M . F act 2.8. g is of lo c al ly b ounde d variation ([24]; se e § 2.4 b elow for functions of b ounde d varia tion ) . The tangent sp ac es at p oints in M \ S M is iso m etric al ly identifie d with the tangent c ones ([2 2]) . The volume me asur e on M ∗ induc e d fr om g d v ol = d v ol g := p | g | dx 8 c oincides with the n -dimensional Hausdorff m e asur e H n ([22]) , w her e dx := dx 1 · · · dx n is the L eb esgue me asur e on a chart. g is uniformly elliptic ([2 2]) , i.e., ther e exists a chart ar ound e ach p oint in M ∗ on which (UE) the eigenva l ues of ( g ij ) ar e b ounde d awa y fr om zer o and b ounde d fr om ab ove. W e assu me that all charts of M ∗ satisfy (UE). Definition 2.9 (Cut-lo cus) . Let p ∈ M b e a p oin t. W e sa y that a p oin t x ∈ M is a cut p oin t of p if no minimal geodesic py fro m p con tains x as an in terior point. The set of cut points of p is called the cut-lo cus of p and denoted by Cut p . F or the W p,t defined in § 1, we hav e S 0 0 } and B − ν ( x, ρ ) := { y ∈ B ( x, ρ ) | h y − x, ν i < 0 } . Denote by J u the set of approxim ate jump p oin t o f u . J u is a Borel set and satisfies J u ⊂ S u (cf. Prop osition 3.69 o f [1]). Definition 2.16 (BV F unction) . An L 1 function u : U → R is of BV ( b ounde d variation ) if t he distributional deriv ativ es D i u , i = 1 , . . . , n , are all finite Radon measures. | D i u | denotes the total v ariatio n measure of D i u . Lemma 2.17 (cf. Lemma 3.76 of [1]) . L et u : U → R b e a BV function and B ⊂ U a Bor el set. (1) If H n − 1 ( B ) = 0 , then | D i u | ( B ) = 0 . (2) If H n − 1 ( B ) < + ∞ and B ∩ S u = ∅ , then | D i u | ( B ) = 0 . Lemma 2.18 (F e derer-V ol’p ert; cf. Theorem 3.78 of [1]) . F or any BV function u : U → R we have H n − 1 ( S u \ J u ) = 0 . Lemma 2.19 (cf. Theorem 3.96 of [1]) . (1) F or any B V functions u 1 , u 2 : U → R an d c 1 , c 2 ∈ R , the line ar c ombination c 1 u 1 + c 2 u 2 is also of BV and satisfie s D i ( c 1 u 1 + c 2 u 2 ) = c 1 D i u 1 + c 2 D i u 2 . (2) Assume | U | < ∞ . If u : U → R is a BV function with inf u > 0 , sup u < + ∞ , and H n − 1 ( J u ) = 0 , and if f : ( 0 , + ∞ ) → R is a C 1 function, then f ◦ u is of BV and D i ( f ◦ u ) = ( f ′ ◦ ˜ u ) D i u. Lemma 2.20 (Leibniz Rule; cf. Example 3.97 in § 3.10 of [1]) . F or a ny b ounde d B V functions u 1 , u 2 : U → R we have the fol lowing (1) and (2) . (1) u 1 u 2 is of BV. (2) If H n − 1 ( J u 1 ∩ J u 2 ) = 0 , then D i ( u 1 u 2 ) = ˜ u 1 D i u 2 + ˜ u 2 D u 1 and J u 1 u 2 is c ontaine d in ( J u 1 \ S u 2 ) ∪ ( J u 2 \ S u 1 ) upto a n H n − 1 - ne gligible set. 2.5. DC functions. Let Ω b e a n op en subset of an Alexandrov space. (Ω is allo w ed to b e an op en subset of R n .) A function u : Ω → R is said to be c onvex if u ◦ γ is a conv ex function for any geo desic γ in Ω. Definition 2.21 (DC F unction) . A lo cally Lipsc hitz function u : Ω → R is o f DC if it is lo cally represen ted as the difference of tw o con ve x functions, i.e., for an y p ∈ Ω there exists t wo conv ex functions v and w on some neigh b orho o d U o f p in Ω suc h that u | U = v − w on U . 11 Lemma 2.22 (cf. § 6.3 of [11]) . F or any DC function u on Ω ⊂ R n , the p artial de rivatives ∂ i u , i = 1 , 2 , . . . , n , ar e al l lo c al ly b ounde d and lo c al ly B V functions. Lemma 2.23 (Perelm an; § 3 of [24]) . L et M b e an n -dimensional A lexandr ov sp ac e. F or any chart ( U, ϕ ) in M ∗ and any DC function u on U , u ◦ ϕ − 1 is of DC on ϕ ( U ) ⊂ R n . In p articular, ∂ i u := ∂ i ( u ◦ ϕ − 1 ) , i = 1 , 2 , . . . , n , ar e al l lo c al ly b ounde d and lo c al ly BV functions. Lemma 2.24 (cf. [24]) . F or any p oint p in a n Alexandr ov sp ac e M , r p ( x ) := d ( p, x ) is a DC function on M \ { p } . 3. Condition BG( κ ) In this section, w e mention some elemen tary and obvious prop erties of Condition BG( κ ). Let M b e an n -dimensional Alexandro v space and p ∈ M a p oin t. F or a subse t C ⊂ M , let A p ( C ) ⊂ M b e the union of imag es of minimal geo desics from p inters ecting C . F or r > 0 and 0 ≤ r 1 ≤ r 2 , we set a C ( r ) := H n − 1 ( A p ( C ) ∩ ∂ B ( p, r )) , A r 1 ,r 2 ( C ) := { x ∈ A p ( C ) | r 1 ≤ r p ( x ) ≤ r 2 } . Lemma 3.1. L et 0 < r 1 ≤ r 2 ≤ R and t := r 1 /r 2 . Then we have a C ( r 1 ) ≥ (1 − θ ( t − 1 | R, κ 0 )) a C ( r 2 ) , wher e κ 0 is a lower b ound o f curvatur e on B ( p, 2 R ) , i.e., κ 0 := κ ( B ( p, 2 R )) , and θ ( · · · ) is defin e d in § 2.1. In p articular, if a C ( r 0 ) = 0 for a num- b er r 0 > 0 , then a C ( r ) = 0 for any r ≥ r 0 . Mor e over, we have a C ( r +) ≤ a C ( r ) ≤ a C ( r − ) for an y r > 0 and a C has at most c ountably many disc ontinuity p oints. Pr o of. T o pro v e the first assertion, we assume that A p ( C ) ∩ ∂ B ( p, r 2 ) is nonempt y . The map Φ p,t : A p ( C ) ∩ ∂ B ( p, r 1 ) ∩ W p,t → A p ( C ) ∩ ∂ B ( p, r 2 ) defined in § 1 is surjectiv e and Lipsc hitz contin uous b y the Alexandro v con ve xit y . If t is close to 1, then so is the Lipsc hitz constan t of Φ p,t . Therefore w e hav e the first assertion of the lemma, whic h prov es the rest. Lemma 3.1 implies the inte grabilit y of a C ( r ). The same pro of as f or a Riemannian manifold leads to (3.1) H n ( A r 1 ,r 2 ( C )) = Z r 2 r 1 a C ( r ) dr for any 0 ≤ r 1 ≤ r 2 . F or a function f : ( α , β ) → R , we set ¯ f ′ ( x ) := lim sup h → 0 f ( x + h ) − f ( x ) h ∈ R ∪ {−∞ , + ∞} , α < x < β . Lemma 3.2. The fol lowing (1)–(3 ) ar e e quivalent to e ach other. 12 (1) BG( κ ) at p . (2) F or any s ubse t C ⊂ M and 0 < r 1 ≤ r 2 ( with r 2 < π / √ κ if κ > 0) , we hav e a C ( r 1 ) ≥ s κ ( r 1 ) n − 1 s κ ( r 2 ) n − 1 a C ( r 2 ) . (3) F or any C ⊂ M and r > 0 with a C ( r ) > 0 ( and with r < π / √ κ if κ > 0) , we have ¯ a ′ C ( r ) ≤ ( n − 1) cot κ ( r ) a C ( r ) . Pr o of. (1) = ⇒ (2): W e fix 0 < r 1 ≤ r 2 . Assume that r 2 < π / √ κ if κ > 0. F or a sufficien tly small δ > 0, we set t δ := r 1 / ( r 2 − δ ). Since Φ − 1 p,t δ ( A r 2 − δ,r 2 ( C )) ⊂ A r 1 ,t δ r 2 ( C ), w e ha ve b y BG( κ ) at p , H n ( A r 1 ,t δ r 2 ( C )) ≥ min r 2 − δ ≤ r ≤ r 2 t δ s κ ( t δ r ) n − 1 s κ ( r ) n − 1 H n ( A r 2 − δ,r 2 ( C )) . W e multiply the b o th sides o f this f orm ula b y 1 / ( t δ δ ) and tak e the limit as δ → 0. Then, r emarking Lemma 3.1 w e obtain (2). (2) = ⇒ (1): Let E ⊂ M b e a compact subset and set r − E := inf x ∈ E r p ( x ), r + E := sup x ∈ E r p ( x ). W e assume r + E < π / √ κ if κ > 0. F o r r ∈ [ r − E , r + E ], we set C := ∂ B ( p, r ) ∩ E , r 2 := r , and r 1 := tr . (2) implies H n − 1 (Φ − 1 p,t ( ∂ B ( p, r ) ∩ E )) ≥ s κ ( tr ) n − 1 s κ ( r ) n − 1 H n − 1 ( ∂ B ( p, r ) ∩ E ) . In tegrating this with resp ect to r ov er [ r − E , r + E ] yields Φ p,t ∗ H n ( E ) = H n (Φ − 1 p,t ( E )) ≥ min r − E ≤ r ≤ r + E t s κ ( tr ) n − 1 s κ ( r ) n − 1 H n ( E ) , whic h implies BG ( κ ) at p . (2) ⇐ ⇒ (3): W e set a ( r ) := a C ( r ) for simplicit y . Let 0 < r 1 ≤ r 2 b e an y n umbers suc h that r 2 < π / √ κ if κ > 0. In (2) w e may assume that r 1 < r 2 and a ( r 1 ) , a ( r 2 ) > 0, so that (2) is equiv alen t to log a ( r 2 ) − log a ( r 1 ) r 2 − r 1 ≤ ( n − 1) log s κ ( r 2 ) − log s κ ( r 1 ) r 2 − r 1 . This is also equiv alen t to that for an y r > 0 with a ( r ) > 0 (and with r < π / √ κ if κ > 0), (log ◦ a ) ′ ( r ) ≤ ( n − 1) cot κ ( r ) . The left-hand side of this is equal t o ¯ a ′ ( r ) /a ( r ). Corollary 3.3. If κ > 0 and if M satisfies BG( κ ) at p ∈ M , then r p ≤ π / √ κ. 13 Pr o of. By Lemma 3.2(2), we ha v e a M ( r ) → 0 as r → π / √ κ . By Lemma 3.1, a M ( r ) = 0 fo r an y r ≥ π / √ κ . Using ( 3 .1) yields tha t H n ( M \ B ( p, π / √ κ )) = 0. This completes t he pro of. Lemma 3.2(2) leads to the following. Corollary 3.4 (Bishop-Gromov Inequalit y) . If M satisfies BG( κ ) at a p oint p ∈ M , then H n ( B ( p, r 1 )) H n ( B ( p, r 2 )) ≥ v κ ( r 1 ) v κ ( r 2 ) for 0 < r 1 ≤ r 2 , wher e v κ ( r ) is the volume of an r -b al l in an n -dime n sional c omplete simply c onne cte d sp ac e fo rm of curvatur e κ . Prop osition 3.5 (Stabilit y for BG( κ )) . L et M i , i = 1 , 2 , . . . , and M b e n -dimension al c omp act Alexandr ov sp ac es o f curvatur e ≥ κ 0 for a c onstant κ 0 ∈ R . If al l M i satisfy BG( κ ) and if M i Gr omov-Hausdorff c onver ges to M , then M satisfies BG( κ ) . Pr o of. By § 3 of [32] or 10 .8 o f [6 ], ( M i , H n ) measured Gromov-Hausdorff con ve rges to ( M , H n ). The rest of t he pro of is o mitted (cf. [7]). The following prop osition and corollary are pro v ed b y standard dis- cussions (cf. Theorem 3 .5 in Chapter IV of [30]). Prop osition 3.6. L et M b e an A l e xandr ov sp ac e w ith BG ( κ ) , κ > 0 . T hen we hav e diam M ≤ π / √ κ . I f diam M = π / √ κ then M is home omorphic to the susp ension over some top olo gic al sp ac e. Corollary 3.7. L et M b e an Alexandr ov sp ac e such that the singular set S M is close d. I f M \ S M is an ( inc omplete ) C ∞ Riemannian ma n- ifold of Ric ≥ κ > 0 and if diam M = π / √ κ , then M is isom etric to the spheric al susp ension over some c omp act A le x andr ov sp ac e. The corollary is a g eneralization of Cheng’s maximal diameter theo- rem [10 ]. Compare also [3]. 4. Gree n Fo rmula Throughout t his section, let M be an n -dimensional Alexandro v space. The purp o se of this section is to pro v e the follo wing G reen form ula , whic h is needed fo r the pro of of the La pla cian Comparison Theorem, 1 .1. Theorem 4.1 (Green F ormula) . L et p ∈ M b e a p oint and E ⊂ M ∗ \ { p } a r e gion satisfying Assumption 4.2 b elow and H n − 1 (Cut p ∩ ∂ E ) = 0 . Then, for any C ∞ function f : M ∗ → R we have Z E f d ¯ ∆ r p = Z E h∇ f , ∇ r p i d H n + Z ∂ E f h ν E , ∇ r p i d H n − 1 , 14 wher e ν E denotes the inwar d normal ve ctor fie l d along ∂ E o f E . In p articular, ¯ ∆ r p ( E ) = Z ∂ E h ν E , ∇ r p i d H n − 1 . Assumption 4.2. E is a compact region in M ∗ with piecewise C ∞ b oundary suc h that | D k g ij | ( ∂ E ∩ U ) = 0 for an y i, j, k = 1 , 2 , . . . , n and for an y c hart U of M ∗ . Here, the pie c ewise C ∞ b oundary means that the b oundary ∂ E is divided into t w o disjoin t subsets ˜ ∂ E and ˆ ∂ E suc h that ˜ ∂ E is a n ( n − 1 ) - dimensional C ∞ submanifold of M ∗ and that ˆ ∂ E is a closed set with H n − 1 ( ˆ ∂ E ) = 0. T o define the distributional Laplacian ¯ ∆, let us consider the distribu- tional div ergence of lo cally BV v ector fields. Let Ω b e an open subset of M ∗ . A lo c al ly BV ve ctor field X on Ω is defined as a linear com bi- nation X = X i ∂ i of lo cally BV functions X 1 , . . . , X n on eac h c hart in Ω with the compatibility condition under c ha rt transformatio ns. F or a lo cally L 1 function u on Ω, the approximate jump set J u on a chart is defined. It is easy to pro ve that J u is independent of the chart, so that J u is defined as a subset of Ω. F or a lo cally L 1 tensor T on M ∗ , the approximate jump set J T ⊂ Ω is defined to b e the union of the appro ximate jump sets of all co efficien ts of T . Definition 4.3 (D istributional D ivergence ) . F or a lo cally b ounded and lo cally BV v ector field X on Ω, the distributional diver genc e of X is defined by div X = div g X := D i ( p | g | X i ) , where X = X i ∂ i on a c hart. By F act 2.8, Lemmas 2.19 and 2 .20, p | g | is a lo cally b ounded and lo cally BV function. Since H n − 1 ( J √ | g | ) ≤ H n − 1 ( S M ∩ M ∗ ) = 0 and by the Leibniz rule (Lemma 2.20), div X is determined indep enden t o f the lo cal c hart. div X is a Radon measure on Ω. R emark 4.4 . div X is a generalization of div X d vol on a C ∞ Riemann- ian manifold, where div X is the usual div ergence of a C ∞ v ector field X . div X/ p | g | is corresp onding to div X dx and is not a n in v ariant under chart tra nsfor mat ions, where d x is the Lebesgue measure on the c hart. Definition 4.5 (D istributional Laplacian) . F or a DC function u on Ω, the partial deriv ativ es ∂ i u , i = 1 , 2 , . . . , n , are lo cally b ounded and lo cally BV functions (see Lemmas 2.22 and 2.23) and so the gr adien t v ector field ∇ u := g ij ∂ j u ∂ i is a lo cally b ounded and locally BV v ector field on Ω. ∇ u is indep enden t of the lo cal c hart. The distributional L aplacian of u ¯ ∆ u := − div ∇ u = − D i ( p | g | g ij ∂ j u ) 15 is defined as a Radon measure on Ω. ¯ ∆ u is corresp onding to ∆ u d vol, where ∆ is the usual Laplacian. By Lemma 2.24, ¯ ∆ r p is defined on M ∗ \ { p } . Lemma 4.6. F or any b ounde d BV ve ctor field X on M ∗ with c omp act supp ort in M ∗ , we have Z M ∗ d div X = 0 . Pr o of. There is a finite co ve ring { U k } of supp X consisting of ch arts of M ∗ with compact closure ¯ U k . W e tak e a C ∞ partition of unity { ρ k : M ∗ → [ 0 , 1 ] } k asso ciated with the cov ering, i.e., supp ρ k ⊂ U k and P k ρ k = 1 o n supp X . Since X = P k ρ k X w e ha ve Z M ∗ d div X = X k Z U k dD i ( p | g | ρ k X i ) = 0 . F or a lo cally L 1 v ector field X = X i ∂ i on Ω, w e define e ( ∇ u, X ) := p | g | ˜ X i D i u, where ˜ X i is the appro ximate limit of X i (see Definition 2.13). Lemma 4.7. L et f : Ω → R b e a C ∞ function, u a b ounde d BV function with c omp act supp ort in Ω , and v a DC function o n Ω . If H n − 1 ( J u ∩ J dv ) = 0 , then div( f u ∇ v ) = f e ( ∇ u, ∇ v ) + ˜ u div( f ∇ v ) , (1) Z Ω f de ( ∇ u, ∇ v ) = − Z Ω ˜ u d div( f ∇ v ) . (2) Pr o of. (2) is obtained by integrating (1) on Ω and using Lemma 4.6. W e pro v e (1). W e fix a relatively compact c hart ( U ; x 1 , . . . , x n ) with ¯ U ⊂ Ω. The uniform ellipticity of ( U ; x 1 , . . . , x n ) implies that | U | < + ∞ . Since g ij are con tinuous on M \ S M , w e hav e S g ij ⊂ S M and ˜ g ij = g ij on M \ S M . By Lemma 2.14, the same is true f o r g ij and p | g | . Since the Hausd orff dimens ion of S M ∩ M ∗ is ≤ n − 2 and since g ij , g ij , and ∂ j v are all BV functions on U , Lemmas 2.1 4 and 2.20 sho w div( f u ∇ v ) = D i ( p | g | u f g ij ∂ j v ) = p | g | f g ij f ∂ j v D i u + ˜ u D i ( p | g | f g ij ∂ j v ) = f e ( ∇ u, ∇ v ) + ˜ u div( f ∇ v ) . Let us study the C ∞ mollifier g ( h ) of the R iemannian metric g on M ∗ . Let { U λ } b e a lo cally finite co v ering of M ∗ consisting of relativ ely compact c harts with ¯ U λ ⊂ M ∗ , and { ρ λ : M ∗ → [ 0 , 1 ] } an asso ciated 16 partition of unity , i.e., eac h supp ρ λ is a compact subset of U λ and P λ ρ λ = 1. Let η ∈ C ∞ 0 ( R n ) b e suc h that η ≥ 0, η ( − x ) = η ( x ), supp η ⊂ B ( o, 1), and R R n η dx = 1. W e set η ǫ := ǫ − n η ( x/ǫ ), ǫ > 0. Denote b y g λ ; ij the co efficien ts o f g with respect to the co ordinate of U λ . F or eac h λ , there exists ǫ λ > 0 suc h t ha t for an y ǫ with 0 < ǫ ≤ ǫ λ , g λ ; ij ∗ η ǫ ( x ) := R U λ η ǫ ( x − y ) g λ ; ij ( y ) dy is a C ∞ Riemannian metric on some neigh b orho o d of supp ρ λ . F or 0 < h ≤ 1, g ( h ) λ denotes the metric tensor defined b y g λ ; ij ∗ η ǫ λ h ( x ). D efine the C ∞ Riemannian metric g ( h ) on M ∗ b y g ( h ) := X λ ρ λ g ( h ) λ . On eac h relativ ely compact c hart U , g ( h ) ij is uniformly b ounded. As h → 0, g ( h ) ij → g ij p oin t wise on U \ S M and D k g ( h ) ij = ∂ k g ( h ) ij dx → D k g ij w eakly ∗ (cf. Prop o sition 3.2 of [1 ]). Lemma 4.8 (Compare F act 2.6(4) (or Theorem 6.1 o f [14])) . F or any ǫ, δ > 0 with δ ≤ δ n , we have lim sup h → 0 sup U \ ( S M ∪ B ( S δ ,ǫ )) | g ( h ) ij − g ij | < θ ( δ | U ) , wher e δ n is that in F act 2.6 and θ ( δ | U ) dep ends also on the c o or dinates of U . Pr o of. The same pro o f as of Lemma 3.2(1) of [22 ] yields that for an y p, q ∈ M and z ∈ U \ B ( S δ , ǫ ), sup x ∈ B ( z ,t ) | ∠ pxq − ∠ pz q | < θ ( δ ) + θ ( t | p, q , z ) . Hence, lo oking at the definition of g in [2 2], we ha ve for an y z ∈ U \ B ( S δ , ǫ ), sup x,y ∈ U ∩ B ( z ,t ) \ S M | g ij ( x ) − g ij ( y ) | < θ ( δ | U ) + θ ( t | z , U ) . This and the relativ e compactness of U \ B ( S δ , ǫ ) imply the lemma. Lemma 4.9. F or any C ∞ ve ctor field Y on M ∗ we have div g ( h ) Y → div g Y we akly ∗ . Pr o of. W e tak e any relative ly compact c hart ( U ; x 1 , . . . , x n ) with ¯ U ⊂ M ∗ and fix it. Let Y = Y i ∂ i . F or ˆ g = g , g ( h ) w e ha v e on U , div ˆ g Y = Y i 2 p | ˆ g | n X k =1 | ( ˆ g j 1 , . . . , ˆ g j,k − 1 , D i ˆ g j k , ˆ g j,k +1 , . . . , ˆ g j n ) j = 1 ,...,n | + ∂ i Y i p | ˆ g | dx, whic h forms F ij k ( ˆ g ) D i ˆ g j k + ∂ i Y i p | ˆ g | dx, 17 where F ij k ( g ( h ) ) is a C ∞ function and F ij k ( g ) is a BV function whic h is contin uous on U \ S M . W e fix i, j, k and set f h := F ij k ( g ( h ) ), f := F ij k ( g ) , µ h := D i g ( h ) j k = ∂ i g ( h ) j k dx , and µ := D i g j k . It suffices to pro ve that f h µ h → f µ w eakly ∗ . Denote the p ositiv e pa rt of µ h b y µ + h and the negativ e par t b y µ − h . There are a sequence h l → 0 and non-negativ e Radon measures ν + and ν − on U suc h that µ ± h l → ν ± w eakly ∗ . It ho lds that µ = ν + − ν − . W e do not kno w the p ositiv e (resp. negativ e) part of µ coincide s with ν + (resp. ν − ). F or simplicit y we write h l b y h . Since f h µ ± h − f ν ± = ( f h − f ) µ ± h + f µ ± h − f ν ± , w e ha v e for an y ϕ ∈ C 0 ( U ), (4.1) Z U ϕf h dµ ± h − Z U ϕf dν ± ≤ Z U | ϕ || f h − f | dµ ± h + Z U ϕf dµ ± h − Z U ϕf dν ± . T ak e an y ǫ, δ > 0 with δ ≤ δ n . If h ≪ δ, ǫ , then | f h − f | < θ ( δ ) on U \ ( S M ∪ B ( S δ , ǫ )) b y Lemma 4.8. By the uniform b o undedness of g ( h ) ij and g ij on U \ S M , we ha v e | f h | , | f | ≤ c on U \ S M , where c is some constan t independen t of h . The limit-sup as h → 0 of the first term of the rig h t-hand side of (4.1) is lim sup h Z U | ϕ || f h − f | dµ ± h (4.2) ≤ lim sup h Z U ∩ B ( S δ ,ǫ ) 2 c | ϕ | dµ ± h + lim sup h Z U \ B ( S δ ,ǫ ) θ ( δ ) | ϕ | dµ ± h ≤ Z U ∩ B ( S δ ,ǫ ) 2 c | ϕ | dν ± + θ ( δ ) Z U | ϕ | dν ± . T o estimate the first term o f the right-hand side, w e pro v e: Sublemma 4.10. We have | ν | ( U ∩ S δ ) = 0 for any δ > 0 , w h er e | ν | := ν + + ν − . Pr o of. By r emarking the uniform ellipticit y of the c harts, a direct cal- culation sho ws t ha t d | µ h | ≤ c ′ dx + c ′ X λ,l,m,a ρ λ d | D λ ; a g λ ; lm ∗ η ǫ λ h | , where c ′ is some p ositiv e constan t, l , m, a run ov er all 1 , 2 , . . . , n , and D λ ; a means D a for the coor dina t e of U λ . According to Prop osition 3.7 of [1] w e ha v e, as h → 0, ρ λ d | D λ ; a g λ ; lm ∗ η ǫ λ h | → ρ λ d | D λ ; a g λ ; lm | w eakly ∗ on U λ , a nd hence d | ν | ≤ c ′ dx + c ′ X λ,l,m,a ρ λ d | D λ ; a g λ ; lm | . Since the Hausdorff dimension of S δ ∩ M ∗ is ≤ n − 2, and b y Lemma 2.17(1), this pro v es the sublemma. 18 By the sublemma, taking δ → 0 after ǫ → 0 in (4.2), w e hav e lim h Z U | ϕ || f h − f | dµ ± h = 0 . W e are going to estimate the other term of (4.1). There is a contin- uous function ψ δ,ǫ : U → [ 0 , 1 ] suc h tha t ψ δ,ǫ = 1 on U ∩ B ( S δ , ǫ ), ψ δ,ǫ = 0 on U \ B ( S δ , 2 ǫ ). Set ¯ ψ δ,ǫ := 1 − ψ δ,ǫ and ta k e a n um- b er h 0 with 0 < h 0 ≪ δ . Since ¯ ψ δ,ǫ ϕf h 0 is contin uous, w e hav e lim h → 0 R U ¯ ψ δ,ǫ ϕf h 0 dµ ± h = R U ¯ ψ δ,ǫ ϕf h 0 dν ± . Moreo v er, b y Lemma 4.8, | f h 0 − f | < θ ( δ ) on U \ ( S M ∪ B ( S δ , ǫ )) and therefore lim sup h Z U ¯ ψ δ,ǫ ϕf dµ ± h − Z U ¯ ψ δ,ǫ ϕf dν ± (4.3) ≤ lim sup h Z U ¯ ψ δ,ǫ ϕf dµ ± h − Z U ¯ ψ δ,ǫ ϕf h 0 dµ ± h + Z U ¯ ψ δ,ǫ ϕf h 0 dν ± − Z U ¯ ψ δ,ǫ ϕf dν ± ≤ θ ( δ ) lim sup h Z U ¯ ψ δ,ǫ | ϕ | dµ ± h + θ ( δ ) Z U ¯ ψ δ,ǫ | ϕ | dν ± ≤ θ ( δ ) . W e also ha v e lim sup h Z U ψ δ,ǫ ϕf dµ ± h ≤ ν ± ( B ( S δ , 3 ǫ )) sup U | ϕf | ≤ θ ( ǫ | δ ) , (4.4) Z U ψ δ,ǫ ϕf dν ± ≤ θ ( ǫ | δ ) . (4.5) Com bining (4.3 ), (4.4), and (4.5) yields lim sup h Z U ϕf dµ ± h − Z U ϕf dν ± ≤ lim sup h Z U ¯ ψ δ,ǫ ϕf dµ ± h − Z U ¯ ψ δ,ǫ ϕf dν ± + lim sup h Z U ψ δ,ǫ ϕf dµ ± h + Z U ψ δ,ǫ ϕf dν ± ≤ θ ( δ ) + θ ( ǫ | δ ) . Th us w e obta in f h µ ± h → f ν ± and so f h µ h = f h µ + h − f h µ − h → f ν + − f ν − = f µ . This comple tes the pro of. W e nee d Lemma 4.9 to pro v e: Lemma 4.11. L et E ⊂ M b e a r e gion satisfying Assumption 4 . 2 . Define I E ( x ) := 1 for x ∈ E , I E ( x ) := 0 for x ∈ M \ E . Then we have D i I E = | g | − 1 / 2 g ij ν j E H n − 1 ⌊ ∂ E , (1) e ( ∇ I E , X ) = h ν E , ˜ X i H n − 1 ⌊ ∂ E (2) 19 for a ny b ounde d m e asur able ve ctor fi eld X on M ∗ , wher e ν E = ν j E ∂ j is the i n war d norm al ve ctor field alo n g ∂ E of E and ⌊ indic ates the r estriction of a me asur e. Pr o of. (1): W e take an y C ∞ v ector field Y on M ∗ . On the C ∞ Rie- mannian manifold ( M ∗ , g ( h ) ), the div ergence form ula implies Z E div g ( h ) Y = − Z ∂ E h ν ( h ) E , Y i g ( h ) d v ol ( ∂ E ,g ( h ) ) , where ν ( h ) E is the in w ard normal v ector field a long ∂ E with resp ect to the metric g ( h ) . It fo llo ws from Assump tion 4.2 that | div g Y | ( ∂ E ) = 0. Lemma 4 .9 sho ws that the left-ha nd side of the ab ov e con v erges to R E div g Y . Since g ( h ) → g on M ∗ \ S M , the righ t- hand side con ve rges to − R ∂ E h ν E , Y i g d H n − 1 ⌊ ∂ E . Therefore w e ha v e Z E div g Y = − Z ∂ E h ν E , Y i g d H n − 1 ⌊ ∂ E , whic h implies (1 ). (2) fo llows from ( 1 ) b y a direct calculation. With the help of Lemma 4.11, w e finally prov e the Green F orm ula. Pr o of of The or em 4.1. By L emma 4.7(1), w e ha v e div( f ∇ r p ) = h∇ f , ∇ r p i d H n − f ¯ ∆ r p , whic h implies Z E d div( f ∇ r p ) = Z E h∇ f , ∇ r p i d H n − Z E f d ¯ ∆ r p . By J dr p ⊂ Cut p , b y the assumption for E , and by applying Lemmas 4.7(2), 4.11(2), the left-hand side of the abov e is equal to Z M ∗ I E d div( f ∇ r p ) = − Z M ∗ \{ p } f de ( ∇ I E , ∇ r p ) = − Z ∂ E f h ν E , g ∇ r p i d H n − 1 . Since H n − 1 (Cut p ∩ ∂ E ) = 0, w e ha v e g ∇ r p = ∇ r p H n − 1 -a.e. on ∂ E . This completes the pro of of the theorem. 5. Laplacian Comp arison W e pro ve Theorem 1.1 b y using the G r een F orm ula (Theorem 4.1). Let a C ( r ) a nd A r 1 ,r 2 ( C ) be as defined in § 3. Lemma 3.2(3) implies the follow ing. Lemma 5.1. If M sa tisfies BG( κ ) at a p oint p ∈ M , then for any C ⊂ M and 0 < r 1 ≤ r 2 , a C ( r 2 ) − a C ( r 1 ) ≤ ( n − 1 ) cot κ ( r 1 ) H n ( A r 1 ,r 2 ( C )) . 20 Denote b y M 3 ( κ 0 ) the three-dimensional complete simply connected space form of curv ature κ 0 . F act 5.2 (W ald Con v exit y; [37, 2]) . L et p 1 , p 2 , q 1 , q 2 ∈ M b e four p oints. T a ke a sufficiently lar ge domai n Ω c ontaining p 1 , p 2 , q 1 , q 2 and set κ 0 := min { κ (Ω) , 0 } . T h en ther e exist four p oints ˜ p 1 , ˜ p 2 , ˜ q 1 , ˜ q 2 ∈ M 3 ( κ 0 ) and i 0 , j 0 = 1 , 2 with ( i 0 , j 0 ) 6 = (1 , 2) such that d ( p 1 , p 2 ) = d ( ˜ p 1 , ˜ p 2 ) , d ( q 1 , q 2 ) ≥ d ( ˜ q 1 , ˜ q 2 ) , d ( p i , q j ) = d ( ˜ p i , ˜ q j ) for ( i, j ) 6 = ( i 0 , j 0 ) , d ( p i 0 , q j 0 ) ≥ d ( ˜ p i 0 , ˜ q j 0 ) . Mor e over, for a ny x i ∈ p i q i , i = 1 , 2 , if w e take ˜ x i ∈ ˜ p i ˜ q i such that d ( p i , x i ) : d ( p i , q i ) = d ( ˜ p i , ˜ x i ) : d ( ˜ p i , ˜ q i ) , then we have d ( x 1 , x 2 ) ≥ d ( ˜ x 1 , ˜ x 2 ) . F or a, b ∈ R (dep ending on a num b er δ > 0), w e define a + b as | a − b | < θ ( δ ). F act 5.3 (5.6 of [6]) . T ak e four p oints p 1 , p 2 , q 1 , q 2 ∈ M a nd set κ 0 := min { κ (Ω) , 0 } for a sufficiently lar ge domain Ω c ontain i n g p 1 , p 2 , q 1 , q 2 . If d ( q 1 , q 2 ) < δ min { d ( p 1 , q 1 ) , d ( p 2 , q 1 ) } and ˜ ∠ p 1 q 1 p 2 > π − δ , then we have ˜ ∠ p 1 q 1 q 2 + ˜ ∠ p 2 q 1 q 2 + π , ∠ p 1 q 1 q 2 + ˜ ∠ p 1 q 1 q 2 , ∠ p 2 q 1 q 2 + ˜ ∠ p 2 q 1 q 2 , wher e ˜ ∠ indic ates the angle of a κ 0 -c omp arison triangle. Corollary 5.4. Under the same assumption as in F act 5.3, if we take a p oint x ∈ p 1 q 1 such that d ( q 1 , x ) < δ min { d ( p 1 , q 1 ) , d ( p 2 , q 1 ) } , then ∠ xq 1 q 2 + ˜ ∠ xq 1 q 2 , (1) ∠ q 1 xq 2 + ˜ ∠ q 1 xq 2 . (2) Pr o of. (1): The Alexandro v con v exit y implies that ∠ xq 1 q 2 ≥ ˜ ∠ xq 1 q 2 ≥ ˜ ∠ p 1 q 1 q 2 + ∠ p 1 q 1 q 2 = ∠ xq 1 q 2 . (2): The p oin ts p 1 , p 2 , x, q 2 satisfy the assumption of F act 5.3. T ak e a p oint q ′ 1 ∈ p 2 x with d ( x, q ′ 1 ) = d ( x, q 1 ) and use (1 ). Then, ∠ p 2 xq 2 + ˜ ∠ q ′ 1 xq 2 . Since ∠ p 1 xp 2 ≥ ˜ ∠ p 1 xp 2 + π , w e ha ve ˜ ∠ q 1 xq ′ 1 ≤ ∠ q 1 xp 2 = π − ∠ p 1 xp 2 + 0. Therefore ∠ p 2 xq 2 + ∠ q 1 xq 2 and ˜ ∠ q ′ 1 xq 2 + ˜ ∠ q 1 xq 2 , whic h imply (2). Let E b e a regio n satisfying the following. 21 Assumption 5.5. E is a region in M ∗ \ { p } satisfying Assumption 4.2 and H n − 1 (Cut p ∩ ∂ E ) = 0. The smo oth part of ∂ E is tra nsve rsal to ∇ r p . Recall that ∂ E is divided into the smo oth pa r t ˜ ∂ E and the non- smo oth part ˆ ∂ E . By H n (Cut p ) = 0, w e hav e a lo t of E ’s satisfying Assumption 5 .5. F or ρ > 0 w e set D := ˜ ∂ E \ ( S M ∪ Cut p ∪ A p ( ˆ ∂ E \ Cut p )) , D ρ := { x ∈ D | there is y ∈ M suc h that x ∈ py and d ( x, y ) ≥ ρ } . Namely , x ∈ D if and only if the fo llowing (1) and (2) hold. (1) x ∈ ˜ ∂ E \ ( S M ∪ Cut p ). (2) If w e extends px to a minimal geo desic from p hitting ˆ ∂ E , then it cannot b e extende d an y more. It is ob vious that S ρ> 0 D ρ = D . Lemma 5.6. (1) D and D ρ ar e Bor el subsets. (2) We have H n − 1 ( ∂ E \ D ) = 0 . Pr o of. (1): F or ρ > 0, we set W ρ := { x ∈ M | there is y ∈ M such that x ∈ py and d ( x, y ) ≥ ρ } . Since D ρ = D ∩ W ρ and W ρ is closed, it suffices to pro ve that D is a Borel se t. In fact, A p ( ˆ ∂ E ∩ W ρ ) is closed, monotone non-increasing in ρ , and satisfies (5.1) [ ρ> 0 A p ( ˆ ∂ E ∩ W ρ ) = A p ( ˆ ∂ E \ Cut p ) , whic h is a Borel set. Since ˜ ∂ E , S M , Cut p are all Borel, so is D . (2): W e tak e an y p oin ts p 1 , p 2 ∈ ˜ ∂ E ∩ A p ( ˆ ∂ E ∩ W ρ ). F or eac h i = 1 , 2, w e extend pp i to a minimal geo desic from p hitting ˆ ∂ E ∩ W ρ and denote the hitting p oin t by x i . W e further extends the geo desic b ey ond x i to the point, sa y q i , suc h that d ( x i , q i ) = ρ . Suc h the po ints x i and q i necessarily exist b ecause of p 1 , p 2 ∈ A p ( ˆ ∂ E ∩ W ρ ). F or the p oin ts p i , q i , x i , i = 1 , 2 , w e apply the W ald conv exit y (F a ct 5 .2) and ha ve d ( p 1 , p 2 ) ≤ c d ( x 1 , x 2 ), where c is a constan t indep enden t of p 1 , p 2 . Therefore, H n − 1 ( ˜ ∂ E ∩ A p ( ˆ ∂ E ∩ W ρ )) ≤ c n − 1 H n − 1 ( ˆ ∂ E ∩ W ρ ) = 0, which together with (5.1) implies H n − 1 ( ˜ ∂ E ∩ A p ( ˆ ∂ E \ Cut p )) = 0. Combin ing this, H n − 1 ( S M ) = 0, and H n − 1 (Cut p ∩ ∂ E ) = 0, w e obtain (2). F or tw o p oin ts x, y ∈ D ρ , we define the p oint π x ( y ) to b e the in- tersection p oint of a minimal geo desic from p passing through y and ∂ B ( p, r p ( x )) (if an y). Since ∇ r p and ˜ ∂ E a re transv ersal to eac h other, if d ( x, y ) is small enough compared with a given x ∈ ˜ ∂ E , suc h the in tersection p oin t π x ( y ) exists. 22 Lemma 5.7. F o r any subset A ⊂ B ( x, δ ) ∩ D ρ with H n − 1 ( A ) > 0 , we have |h ν E ( x ) , ∇ r p ( x ) i| H n − 1 ( A ) H n − 1 ( π x ( A )) − 1 < θ ( δ | x, ρ ) . Pr o of. W e fix x and ρ , then w e write θ ( δ ) = θ ( δ | x, ρ ). Assume δ ≪ ρ . F or a, b ∈ R , w e define a ≃ b as | a − b | ≤ θ ( δ ) | a | . Let y , z ∈ B ( x, δ ) ∩ D ρ b e tw o differen t p oints. W e ta ke a minimal geo desic, say σ ( r esp. τ ), from p con taining p y (resp. pz ) whic h has maximal length. It fo llo ws that L ( σ ) , L ( τ ) ≥ r − δ + ρ ≥ r + ρ/ 2, where we set r := r p ( x ). Sublemma 5.8. We have d ( σ ( t 1 ) , τ ( t 1 )) ≃ d ( σ ( t 2 ) , τ ( t 2 )) f o r any t 1 and t 2 with σ ( t i ) , τ ( t i ) ∈ B ( x, δ ) . Pr o of. The Alexandro v con v exit y implies d ( σ ( t 1 ) , τ ( t 1 )) ≥ (1 − θ ( δ )) d ( σ ( t 2 ) , τ ( t 2 )) . An in v erse estimate follo ws from applying the W ald con v exity (F act 5.2) to p 1 := σ ( t 1 ), p 2 := τ ( t 1 ), q 1 := σ ( r + ρ/ 2), q 2 := τ ( r + ρ/ 2), x 1 := σ ( t 2 ), x 2 := τ ( t 2 ). Setting y ′ := τ ( r p ( y )) and z ′ := σ ( r p ( z )) w e hav e, b y Sublemma 5 .8, d ( π x ( y ) , π x ( z )) ≃ d ( y , y ′ ) ≃ d ( z , z ′ ) . Let α := ∠ z y z ′ . By Coro llary 5 .4 , α + ˜ ∠ z y z ′ and hen ce d ( y , z ) sin α ≃ d ( π x ( y ) , π x ( z )) . W e also ha v e | r p ( y ) − r p ( z ) | = d ( y , z ′ ) ≃ d ( y , z ) cos α. W e assume that δ is small enough compared with x . Then, there is a c hart ( U, ϕ ) of M ∗ con taining B ( x, δ ) suc h that ϕ ( ∂ E ) is a hyper-plane in ϕ ( U ) ⊂ R n and g ij ( x ) = δ ij . Let c b e a curv e from y to z suc h that ϕ ◦ c is a Euclidean line segmen t in ϕ ( U ). Since h ˙ c ( s ) , ∇ r p ( c ( s )) i + h ˙ c (0) , ∇ r p ( y ) i and L ( c ) ≃ d ( y , z ), the first v ariation form ula leads to r p ( y ) − r p ( z ) ≃ d ( y , z ) h ˙ c (0) , ∇ r p ( y ) i . and so cos α + |h ˙ c (0) , ∇ r p ( y ) i| . Therefore, d ( y , z ) q 1 − h ˙ c (0) , ∇ r p ( y ) i 2 ≃ d ( π x ( y ) , π x ( z )) . T ak e a hy p er-plane H ⊂ R n con taining ϕ ( x ) and p erp endicular to ∇ r p ( x ). D enoting the o rthogonal pro jection by P : ϕ ( ∂ E ) → H , we see d R n ( P ( ϕ ( y )) , P ( ϕ ( z ))) = d ( y , z ) q 1 − h ˙ c (0) , ∇ r p ( y ) i 2 ≃ d ( π x ( y ) , π y ( z )) , 23 whic h implies that H n − 1 ( π x ( A )) ≃ H n ( P ( ϕ ( A ))). Since g ij + δ ij on U , w e hav e d ( y , z ) ≃ d R n ( ϕ ( y ) , ϕ ( z )) and H n − 1 ( A ) ≃ H n − 1 ( ϕ ( A )). This completes the pro of. Pr o of of The or em 1.1. By the Green F orm ula (Theorem 4.1), it suffices to prov e the theorem that (5.2) Z ∂ E h ν E , ∇ r p i d H n − 1 ≥ − ( n − 1 ) sup x ∈ E cot κ ( r p ( x )) H n ( E ) for any region E satisfying Assumption 5.5. W e define D − := { x ∈ D | h ν E ( x ) , ∇ r p ( x ) i < 0 } , D + := { x ∈ D | h ν E ( x ) , ∇ r p ( x ) i > 0 } , D ± ρ := D ρ ∩ D ± . They are all H n − 1 -measurable sets. T ak e any ǫ > 0 and fix it for a momen t. Let δ x,ρ > 0 b e a n um b er small enough compared with x , ρ , and ǫ . F or the θ ( δ | x, ρ ) of Lemma 5.7, w e assume θ ( δ x,ρ | x, ρ ) ≤ ǫ . F or a p oin t x ∈ ∂ D − , let π ( x ) be the in tersection p oint of px and ∂ E whic h is nearest to x . F rom the definition of D w e ha v e π ( D − ) ⊂ D + . T ak e a coun table dense subs et { x − k } k ⊂ D − ρ and set x + k := π ( x − k ). It holds that x + k ∈ D + . W e find a num b er δ k in suc h a w a y that 0 < δ k < δ x − k ,ρ and π ( B ( x − k , δ k ) ∩ D − ρ ) ⊂ B ( x + k , δ x + k ,ρ ). It fo llo ws from D − ρ ⊂ S k B ( x − k , δ k ) that there are disjoin t H n − 1 -measurable subsets B − k ⊂ B ( x − k , δ k ) with D − ρ = S k B − k . Setting B + k := π ( B − k ) w e hav e B + k ⊂ D + ρ . The definition of δ k and Lemm a 5.7 lead to |h ν E ( x ± k ) , ∇ r p ( x ± k ) i| H n − 1 ( B ± k ) H n − 1 ( π x ± k ( B ± x ± k )) − 1 < ǫ. T aking δ k small enough, w e assume that |h ν E ( x ± k ) , ∇ r p ( x ± k ) i − h ν E , ∇ r p i| < ǫ on B ± k . Th us w e ha ve Z D − ρ ∪ π ( D − ρ ) h ν E , ∇ r p i d H n − 1 = X k ( Z B − k h ν E , ∇ r p i d H n − 1 + Z B + k h ν E , ∇ r p i d H n − 1 ) ≥ X k h ν E ( x − k ) , ∇ r p ( x − k ) iH n − 1 ( B − k ) + h ν E ( x + k ) , ∇ r p ( x + k ) iH n − 1 ( B + k ) − 2 ǫ H n − 1 ( ∂ E ) ≥ X k n H n − 1 ( π x + k ( B + k )) − H n − 1 ( π x − k ( B − k )) o − 4 ǫ H n − 1 ( ∂ E ) . 24 By Lemma 5.1, this is ≥ − ( n − 1) sup E cot κ ◦ r p X k H n ( A r + k ,r − k ( π x − k ( B − k ))) − 4 ǫ H n − 1 ( ∂ E ) . where w e set r ± k := r p ( x ± k ). Let A ( D − ρ ) b e the region in A p ( D − ρ ) b et w een D − ρ and π ( D − ρ ). W e assume the division { B − k } k of D − ρ to b e so fine that X k H n ( A r + k ,r − k ( π x − k ( B − k ))) − H n ( A ( D − ρ )) < ǫ. Therefore, Z D − ρ ∪ π ( D − ρ ) h ν E , ∇ r p i d H n − 1 ≥ − ( n − 1) sup E cot κ ◦ r p ( H n ( A ( D − ρ )) + ¯ ǫ ) − 4 ǫ H n − 1 ( ∂ E ) , where ¯ ǫ is either ǫ or − ǫ . W e define A ( D − ) as in the same manner as A ( D − ρ ). After ǫ → 0 w e tak e ρ → 0 and then ha v e (5.3) Z D − ∪ π ( D − ) h ν E , ∇ r p i d H n − 1 ≥ − ( n − 1) sup E cot κ ◦ r p H n ( A ( D − )) . Set D ′ := D + \ π ( D − ). The set of x ∈ ∂ E suc h that px passes t hro ugh D ′ is of H n − 1 -measure zero. Therefore, the same discuss ion a s ab o ve leads to (5.4) Z D ′ h ν E , ∇ r p i d H n − 1 ≥ − ( n − 1 ) sup E cot κ ◦ r p H n ( A ( D ′ )) , where A ( D ′ ) is the in tersection o f E a nd t he union of images o f minimal geo desics from p in t ersecting D ′ . By (5.3 ) and (5.4) w e obta in (5.2). This completes the pro of. By using Theorem 1.1, a direct calculation implies Corollary 5.9. Under the same assumption as in Th e or em 1.1, for any C 2 function f : R → R with f ′ ≥ 0 , we have ¯ ∆ f ◦ r p ≥ − ( s n − 1 κ f ′ ) ′ s n − 1 κ ◦ r p d H n on M ∗ \ { p } . R em a rk 5.10 . ¯ ∆ r p is not absolutely contin uo us with resp ect to H n on the cut-lo cus of p . In fa ct, let M be a n n -dimensional complete Riemannian manifold without b oundar y and N ⊂ M a k -dimensional submanifold without b oundary whic h is contained in Cut p for a p oin t p ∈ M . (W e do assume the completeness of N .) D enote b y ν ( N ) the normal bundle ov er N and b y ν ǫ ( N ) the set of v ectors in ν ( N ) with length ≤ ǫ . W e assume t hat there exists a nu m b er ǫ 0 > 0 suc h that exp( ν ǫ 0 ( N )) ∩ Cut p = N . F or x ∈ N , let V x b e the set of unit v ectors 25 at x tang ent to minimal geo desics from x to p . V x is isometric to a ( n − k − 1)-sphere of radius ∈ ( 0 , 1 ]. The angle b et w een u and V x , α ( x ) := inf v ∈ V x ∠ ( u, v ), is constan t for all u ∈ ν 1 ( N ) ∩ T x M . Applying Theorem 4 .1 to ν ǫ ( N ′ ), N ′ ⊂ N , 0 < ǫ ≤ ǫ 0 , we ha ve d ¯ ∆ r p ⌊ N ( x ) = ω n − k − 1 cos α ( x ) d H k ⌊ N ( x ) , where ω n − k − 1 is the v olume of a unit ( n − k − 1) - sphere. In particular, ¯ ∆ r p is not absolutely contin uous with resp ect to H n on N . The followin g is needed in the pro ofs o f Theorem 1 .3 , Corollaries 1.5 and 1.6. Corollary 5.11. F or any f ∈ C ∞ 0 ( M ∗ \ { p } ) with f ≥ 0 , we have Z M ∗ h∇ r p , ∇ f i d H n ≥ Z M ∗ f d ¯ ∆ r p ≥ − ( n − 1 ) Z M ∗ f cot κ ◦ r p d H n . Pr o of. Theorem 1.1 s a ys the second ineq ualit y o f the corollary . In the case where M ∗ has no b oundary , the Green F orm ula (Theorem 4.1) tells us that the first t erm is equal to the second. W e prov e the first inequalit y in the case where M ∗ has non-empt y bo undar y . Assume that M ∗ has non-empt y b o undary . Sinc e M ∗ is a C ∞ manifold with C ∞ b oundary ∂ M ∗ , w e can approximate ∂ M ∗ b y a C ∞ h yp ersurface N ⊂ M ∗ with resp ect to the C 1 top ology suc h that H n − 1 (Cut p ∩ N ) = 0 and | D k g ij | ( N ∩ U ) = 0 for an y i, j, k and for any c hart U o f M ∗ . Let V N b e the closed regio n in M ∗ b ounded by N and not con taining the b oundary of M ∗ . W e find a compact region E ⊂ M ∗ \ { p } satisfying the assumption o f the Green F ormula (Theorem 4.1) suc h that V N ∩ supp f ⊂ E ⊂ V N . The Green F o r m ula implies Z V N h∇ r p , ∇ f i d H n = Z V N f d ¯ ∆ r p − Z N ∩ supp f f h ν N , ∇ r p i d H n − 1 , where ν N is the inw ard unit normal v ector fields on N with resp ect to V N . Since M is con ve x in the double of M , as N con verges to the b oundary of M ∗ in the C 1 top ology , an y limit of h ν N , ∇ r p i is non- p ositiv e, whic h together with F at ou’s lemma sho ws lim sup N → ∂ M ∗ Z N ∩ supp f f h ν N , ∇ r p i d H n − 1 ≤ 0 . This completes the pro of. 6. Splitting Theorem W e prov e the T op olo gical Splitting Theorem, 1.3, follow ing the idea of Cheeger-Gromoll [8]. Let M b e a non-compact Alexandrov space and γ a r ay in M , i.e., a geo desic defined o n [ 0 , + ∞ ) suc h tha t d ( γ ( s ) , γ ( t )) = | s − t | for a ny s, t ≥ 0. 26 Definition 6.1 (Busemann F unction) . The B usemann function b γ : M → R for γ is define d b y b γ ( x ) := lim t → + ∞ { t − d ( x, γ ( t )) } , x ∈ M . It follow s from the triangle inequalit y that t − d ( x, γ ( t )) is monotone non-decreasing in t , so that t he limit ab ov e exists. b γ is a 1-Lipsc hit z function. Definition 6.2. W e sa y that a ray σ in M is asymptotic to γ if there exist a sequence t i → + ∞ , i = 1 , 2 , . . . , and minimal geo desics σ i : [ 0 , l i ] → M with σ i ( l i ) = γ ( t i ) suc h that σ i con ve rges to σ as i → ∞ , (i.e., σ i ( t ) → σ ( t ) for eac h t ). F or any p oin t in M , there is a ra y a symptotic to γ f rom the p o int. An y subray of a ra y asymptotic to γ is asymptotic to γ . By the same pro of as for Riemannian manifolds (cf. Theorem 3.8.2(3) of [3 1 ]), f or an y ra y σ asymptotic to γ w e ha v e (6.1) b γ ◦ σ ( s ) = s + b γ ◦ σ (0 ) for any s ≥ 0. F or a complete Riemannian manifo ld, b γ is differen tiable at σ ( s ) for an y s > 0, whic h seems to b e true also for Alexandro v spaces, but w e do not need it for the pro of of Theorem 1.3. Lemma 6.3. L et f : M → R b e a 1 -Li p schitz function and u, v ∈ Σ p M two dir e c tions a t a p oint p ∈ M . I f the dir e ctional deriva tive of f to u is e qual to 1 and that to v e qual to − 1 , then the angle b etwe en u and v is e qual to π . Pr o of. There are p oints x t , y t ∈ M , t > 0, suc h that d ( p, x t ) = d ( p, y t ) = t for all t > 0 and that the direction at p of px t (resp. py t ) conv erges to u (resp. v ) as t → 0. The a ssumption f o r f tells us that lim t → 0 f ( x t ) − f ( p ) t = 1 and lim t → 0 f ( y t ) − f ( p ) t = − 1 , whic h imply lim t → 0 d ( x t , y t ) t ≥ lim t → 0 f ( x t ) − f ( y t ) t = 2 . This completes the pro of. Lemma 6.4. Assume that a r ay σ : [ 0 , + ∞ ) → M is asymptotic to a r ay γ : [ 0 , + ∞ ) → M , and let s b e a given p ositive numb e r. The n , among al l r ays emanating fr om σ ( s ) , only the subr ay σ | [ s, + ∞ ) of σ is asymptotic to γ . Pr o of. Lo ok a t ( 6 .1) and use Lemma 6.3 for f := b γ . Lemma 6.5. L et γ b e a str ai g ht line in M . Denote by b + the Busemann function for γ + := γ | [ 0 , + ∞ ) and by b − that for γ − := γ | ( −∞ , 0 ] . If 27 b + + b − ≡ 0 holds, then M is c ov er e d by disjoint str aigh t lines bi- asymptotic to γ . I n p articular, b − 1 + ( t ) for al l t ∈ R ar e home omo rphic to e a c h other and M is home omo rphic to b − 1 + ( t ) × R . Pr o of. T ak e any p oint p ∈ M and a ra y σ : [ 0 , + ∞ ) → M from p asymptotic to γ + . F o r any s > 0, the directional deriv ativ es of b + to the t wo opp osite directions at σ ( s ) tangent to σ a r e − 1 and 1 resp ectiv ely . Since b − = − b + and b y Lemma 6 .3, a r a y fro m σ ( s ) a symptotic to γ − is unique and con t a ins σ ([ 0 , s ]). By the arbitrar iness of s > 0, σ extends to a straigh t line bi- asymptotic to γ . Namely , for a giv en point p ∈ M , we hav e a straigh t line σ p passing thr o ugh p and bi-asymptotic to γ . By L emma 6.4, a n y ray from a p oin t in σ p asymptotic to γ ± is a subra y of σ p . In particular, σ p is unique (upto parameters) f or a giv en p . M is co v ered b y { σ p } p ∈ M and this completes the pro of. Lemma 6.6. Assume that M satisfies BG(0) at an y p oin t on a r ay γ in M . Then, the Busemann function b γ is E -subharmoni c. See Definition 2.10 f o r the definition of E -subharmonicit y . Pr o of. W e ta ke a seq uence t i → + ∞ , i = 1 , 2 , . . . . Since r γ ( t i ) , b γ are 1-Lipsc hitz, they are H n -a.e. differentiable. Let x ∈ M ∗ b e any p oint where r γ ( t i ) and b γ are all differentiable. W e hav e a unique minimal geo desic σ x,i from x to γ ( t i ) and ∇ r γ ( t i ) ( x ) is tangen t to it. A ra y σ x from x asymptotic to γ is unique and −∇ b γ ( x ) is tangen t to it. Since σ x,i → σ x as i → ∞ , w e ha ve ∇ r γ ( t i ) ( x ) → −∇ b γ ( x ). Therefore, the dominated con v ergence t heorem and Corolla ry 5.11 sho w tha t f o r a n y u ∈ C ∞ 0 ( M ∗ ) with u ≥ 0, − Z M ∗ h∇ b γ , ∇ u i d H n = lim i Z M ∗ h∇ r γ ( t i ) , ∇ u i d H n ≥ − ( n − 1 ) lim i Z M ∗ u r γ ( t i ) d H n = 0 . This completes the pro of. R em a rk 6.7 . In general, b γ is not of DC and ¯ ∆ b γ do es not exist as a Radon measure. Pr o of o f The or em 1.3. By Lemma 6.6, b := b + + b − is E -subharmonic. It follo ws from the triangle inequalit y that b ≤ 0. W e ha ve b ◦ γ ≡ 0 b y t he definition o f b . The maximum principle ( Lemma 2.12) prov es b ≡ 0. Lemma 6.5 implies the theorem. Pr o of o f Cor ol lary 1.4. W e denote b y ∆ the usual L a placian induced from the C ∞ Riemannian metric o n M \ S M . It follow s from b + + b − = 0 that b + is E -subharmonic and E -sup erharmonic, so that b + is a w eak solution of ∆ u = 0 on M \ S M . By the regularit y theorem of elliptic dif- feren tial equation, b + is C ∞ on M \ S M and satisfies ∆ b + = 0 p oin twis e on M \ S M . By using W eitzen b¨ oc k fo rm ula and b y Ric( ∇ b + , ∇ b + ) ≥ 0, 28 the Hessian of b + v anishes on M \ S M , namely b + is a linear function along any geo desic in M \ S M . Since an y geo desic joining tw o p oin ts in M \ S M is con tained in M \ S M , the set of geo des ic segmen ts in M \ S M is dense in the set of a ll geo desic segmen ts. Therefore, b + is linear a long an y geodesic in M . Since M is cov ered b y straigh t lines bi-asymptotic to γ , b + is a ve raged D 2 in the sense of [1 8]. The corollary follo ws from Theorem A of [1 8]. Reference s 1. L. Ambrosio, N. F usco , a nd D. Pallara, F unctions of b ou n de d variation and fr e e disc ont inu ity pr oblems , O xford Univ er sity Pre ss, New Y ork, 20 00. 2. V. N. Ber estovski ˘ ı, Sp ac es with b ounde d curvatur e and distanc e ge ometry , Sibirsk. Mat. Zh. 27 (1986 ), no. 1, 11–25, 1 97. 3. J. E . Bor zellino, Orbifolds of maximal diameter , Indiana Univ. Math. J. 42 (1993), no. 1, 37–53 . 4. J. E. Borzellino and S.-H. Zhu, Th e splitting the or em for orbifo lds , Illino is J. Math. 38 (1994), no. 4, 679– 691. 5. D. Burago , Y. Burago, and S. Iv anov, A c ou r s e in m et ric ge ometry , Graduate Studies in Mathematics, v ol. 33, American Ma thematical So ciety , Providence, RI, 2001. 6. Y u. Bura go, M. Gromov, and G. Perel’man, A. D. A leksandr ov sp ac es with curvatur es b ounde d b elow , Usp ekhi Mat. Nauk 47 (1992), no . 2(28 4), 3–5 1, 222, translation in Russian Math. Surveys 47 (1992), no. 2, 1–58 . 7. J. Cheeger and T. H. C o lding, On t he st ructur e of sp ac es with Ric ci cu rvatur e b ounde d b elow. I , J. Differential Geom. 46 (1997), no. 3, 406– 4 80. 8. J. Cheeger and D. Gr omoll, The splitting the or em for manifolds of nonne gative Ric ci curvatur e , J. Differen tia l Geometry 6 (19 7 1/72), 11 9–128 . 9. J. Cheeger a nd S. T. Y au, A lower b ound for the he at kernel , Comm. Pure Appl. Math. 34 (1981 ), no. 4, 465–480 . 10. S. Y. Cheng, Eigenvalue c omp arison the or ems and its ge ometric applic ations , Math. Z. 143 (1975 ), no. 3, 289–297 . 11. L. C. Ev ans and R. F. Gar iepy , Me asur e the ory and fine pr op erties of funct ions , Studies in Adv anced Mathematics, CRC Pr e ss, B o ca Raton, FL, 1992 . 12. M. F ukushima, Y. Oshima, a nd M. T akeda, Dirichlet forms and symmetric Markov pr o c esses , de Gruyter Studies in Math., vol. 19, W alter de Gruyter, Berlin–New Y or k, 1994. 13. K . Kuw a e, Maximum principles for subharmonic functions via lo c al semi- Dirichlet forms , to a ppea r in Canadian J. Math. 14. K . K u w ae, Y. Machigashira, a nd T. Shioy a, S ob olev sp ac es, Laplacian, and he at kernel on Alexandr ov sp ac es , Math. Z. 238 (200 1), no. 2, 269–31 6. 15. K . Kuw a e and T. Shioya, On gener alize d me asur e c ontr action pr op erty and ener gy functionals over Lipschitz maps , Poten tial Anal. 15 (2001), no . 1 -2, 105–1 21, ICP A98 (Hammamet). 16. , Sob olev and Dirichlet sp ac es over maps b etwe en metric sp ac es , J. Reine Angew. Math. 555 (2003 ), 39 –75. 17. J . Lott and C. Villani, Ric ci curvatur e for metric-me asur e sp ac es via optimal tr ansp ort , to app ear in Ann. Math., 2 006. 18. Y. Mashiko, A splitting the or em for Alex andr ov sp ac es , Pacific J. Math. 20 4 (2002), no. 2, 445–4 58. 19. A. D. Milk a, Metric st ructur e of a c ert ain class of sp ac es that c ontain str aight lines , Ukrain. Geometr. Sb. Vyp. 4 (196 7), 43–48 . 29 20. S. Ohta, On the me asur e c ont r action pr op erty of metric me asur e sp ac es , to app ear in Comment. Ma th. Helv., 2 006. 21. Y. Otsu, Almost everywher e existanc e of se c ond differ entiable structu r e of Alexandr ov sp ac es , pr eprint. 22. Y. Otsu and T. Shioya, The Riemannian st ructur e of Alexandr ov sp ac es , J. Different ial Geom. 39 (1994 ), no. 3, 629–658 . 23. G. Perelman, A. D. Alexandr ov’s sp ac es with curvatu re s b ounde d fr om b elow II , preprint. 24. , DC-struct u r e on Alexandr ov sp ac e , preprint . 25. , Elements of Morse the ory on Alexandr ov sp ac es , St. Petersburg Math. Jour. 5 (1994), no. 1, 207– 214. 26. A. Petrunin, Subharmonic fun ctions on Alexandr ov sp ac e , preprint. 27. , Par al lel tr ansp ortation for Alexandr ov sp ac e with cur vatu r e b oun de d b elow , Geom. F unct. Anal. 8 (1998 ), no. 1, 123–148 . 28. , Harmonic functions on Alexandr ov sp ac es and their applic ations , Elec- tron. Res. Announc. Amer. Math. So c. 9 (200 3), 135–14 1 (electronic). 29. A. Ranjbar- Mo tlagh, Poinc ar´ e ine quality for abstr act sp ac es , Bull. Austral. Math. Soc . 71 (2005), no. 2, 193–2 04. 30. T. Sak ai, Ri emannian ge ometry , Americ an Mathema tical So ciety , Providence, RI, 1996, T r a nslated from the 1992 Japa nes e o riginal b y the author. 31. K . Shiohama, T. Shioya, and M. T ana k a , The ge ometry of total curvatur e on c omplete op en su rfac es , Cambridge T ra cts in Mathematics, vol. 1 5 9, Cambridge Univ. Press , 2003 . 32. T. Shioy a , Mass of r ays in Ale xandr ov s p ac es of nonne gative curvatur e , Com- men t. Math. Helv. 69 (1994 ), no. 2, 2 08–22 8. 33. K .-T. Sturm, Diffusion pr o c esses and he at kernels on metric sp ac es , Ann. Probab. 26 (1998), no. 1, 1–5 5. 34. , On the ge ometr y of metric me asur e sp ac es. I , Acta Math. 1 96 (2 006), no. 1, 65–13 1. 35. , On the ge ometry of metric me asure sp ac es. II , Acta Math. 196 (2006 ), no. 1, 133–1 77. 36. M.-K . von Reness e, He at kernel c omp arison on Alexandr ov sp ac es with curva- tur e b ounde d b elow , Potential Anal. 21 (200 4), no. 2, 151–17 6. 37. A. W ald, Be gr ¨ undung einer ko or dinatenlosen Differ entialge ometrie der Fl¨ achen , Ergebniss e eines mathematishen Kollo quiums 7 (1 935), 24–46. 38. M. W atanab e, L o c al cu t p oints and metric me asur e sp ac es with Ri c ci curvatur e b ounde d b elow , 20 06, preprint. Dep ar tment of Ma thema tics, F a cul ty of Educa tion, Kumamoto Uni- versity, Kumamoto, 860-8555, JAP AN E-mail addr ess : kuwae@ gpo.ku mamoto-u.ac.jp Ma thema tical Institute, Tohok u University, Sendai 980-8578, JAP AN E-mail addr ess : shioya @math. tohoku.ac.jp 30 $p$
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment