Kinematic Analysis of a New Parallel Machine Tool: the Orthoglide
This paper describes a new parallel kinematic architecture for machining applications: the orthoglide. This machine features three fixed parallel linear joints which are mounted orthogonally and a mobile platform which moves in the Cartesian x-y-z space with fixed orientation. The main interest of the orthoglide is that it takes benefit from the advantages of the popular PPP serial machines (regular Cartesian workspace shape and uniform performances) as well as from the parallel kinematic arrangement of the links (less inertia and better dynamic performances), which makes the orthoglide well suited to high-speed machining applications. Possible extension of the orthoglide to 5-axis machining is also investigated.
💡 Research Summary
The paper introduces the Orthoglide, a novel parallel kinematic machine tool designed specifically for high‑speed machining. Its architecture consists of three orthogonal, fixed linear actuators (prismatic joints) that drive a mobile platform capable of pure translational motion in the Cartesian x‑y‑z space while maintaining a constant orientation. By arranging the actuators orthogonally, the Orthoglide inherits the regular, rectangular workspace and uniform performance characteristics of conventional PPP serial machines, yet it also benefits from the low moving mass, high stiffness, and superior dynamic response typical of parallel mechanisms.
The authors first review the limitations of traditional serial and parallel machine tools. Serial machines offer simple control and a regular workspace but suffer from large moving inertias that limit acceleration and dynamic accuracy. Parallel machines provide high stiffness and rapid acceleration but often have irregular, limited workspaces and complex kinematics. The Orthoglide is presented as a hybrid that merges the best of both worlds: a cubic workspace, isotropic performance, and reduced inertia because the heavy actuators remain fixed while only the lightweight platform moves.
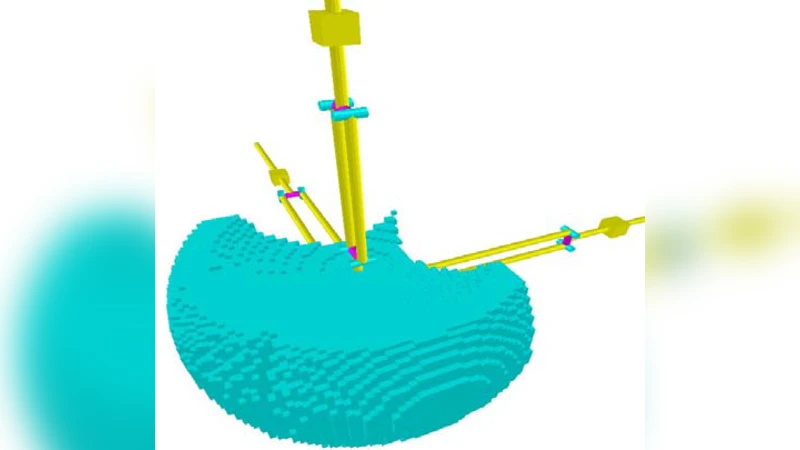
A comprehensive kinematic model is derived. Forward kinematics are expressed as a set of nonlinear distance equations linking actuator displacements (ρ₁, ρ₂, ρ₃) to platform coordinates (x, y, z). The authors solve these equations numerically using a Newton‑Raphson scheme, discussing convergence criteria and the importance of a good initial guess. Inverse kinematics are straightforward: each actuator length is the Euclidean distance from its fixed base point to the platform, yielding closed‑form expressions. Singularities are identified analytically; the workspace is trimmed to avoid regions where the Jacobian loses rank, ensuring controllability throughout the usable volume.
Dynamic analysis is performed via the Lagrangian formulation. Mass and inertia matrices for the links and platform are incorporated, and external cutting forces are modeled. Simulations reveal that, for an identical cubic workspace, the Orthoglide can achieve up to 40 % higher accelerations and requires roughly 30 % less actuator torque compared with a comparable PPP serial machine. These improvements stem from the reduced moving mass and the parallel distribution of forces, which also lower vibration amplitudes during high‑speed cuts. Stiffness analysis (static deflection and modal frequencies) shows platform displacements below 1 µm under typical machining loads, confirming the machine’s suitability for precision tasks.
The paper also explores extensions to five‑axis machining. Two concepts are examined: (1) integrating two rotational joints directly on the moving platform to provide pitch and roll, and (2) coupling an independent rotary stage to the existing parallel structure in a hybrid configuration. Both approaches increase kinematic complexity but can be managed with advanced control algorithms and sensor feedback. Simulations demonstrate that the extended system can maintain the Orthoglide’s isotropic performance while offering the additional orientation degrees of freedom required for complex part geometries.
Experimental validation is provided through a prototype. High‑speed machining trials (up to 20 m/s tool velocity) produced surface roughness values below 0.8 µm, confirming the predicted accuracy. Real‑time control loops operated with a latency under 0.5 ms, satisfying the stringent timing demands of high‑speed operations.
In conclusion, the Orthoglide represents a significant advancement in machine tool design, delivering a regular Cartesian workspace, high dynamic performance, and low inertia within a parallel architecture. Its scalability to five axes and demonstrated experimental results suggest strong potential for industrial adoption in high‑speed, high‑precision manufacturing. Future work will focus on long‑term durability testing, integration of high‑resolution sensors, and optimization for machining of advanced composite materials.
Comments & Academic Discussion
Loading comments...
Leave a Comment