Etude Des Signaux Recueillis Par Un Radar Embarque Sur Un Vehicule En Deplacement. Application a LInterpretation Des Signaux Recoltes Par Le Radar Wisdom De la Mission Spatiale Exomars
The ExoMars mission of the program Aurora (ESA) aims to send a vehicle (Rover) on Mars in 2013. Beyond the technological aspects of the mission, the Rover will also carry scientific instruments for the analysis of Mars subsurface to search traces of past or present life in the Martian soil. The Rover will embark a drilling machine which will give access to samples of sub-surface of Mars to 2 meters depth. This constitutes the great originality of ExoMars, because the Mars sub-surface remains still unknown and seems to be the best place to shelter good conditions to create life. This drilling machine will be guided by a radar system sounder UHF, the WISDOM instrument, which will also make possible to probe the Mars sub-surface to a few meters of depth to detect water and to study the geological structures. We have analytical and numerical electromagnetic models to simulate the behavior of an electromagnetic wave in the Mars sub-surface, but also to simulate the interactions between the wave and the structure of the Rover. The objective of the work which we present consists in the study of the factors able to create disturbances of measurements in order to correct the effects on the measured signal. Initially we present the solution which we retained in order to be able during the same calculation to simulate the displacement of the Rover on several tens of meters. We also present the results relating to the effect of the orientation of the antenna during displacement due to topography of the observation site.
💡 Research Summary
The paper presents a comprehensive study of electromagnetic interference affecting the WISDOM UHF radar sounder mounted on the ExoMars rover, with the aim of ensuring reliable subsurface measurements during rover traversal on Mars. The ExoMars mission, part of ESA’s Aurora program, intends to deploy a rover equipped with a drill capable of reaching 2 m below the Martian surface. The drill will collect samples for astrobiological analysis, while the WISDOM radar will simultaneously probe the subsurface to detect water, ice, and geological structures.
The authors first outline the scientific motivation: the Martian subsurface is considered the most promising environment for preserving biosignatures, yet it remains largely unexplored. The radar operates in the 500 MHz–3 GHz band, providing a few‑meter penetration depth. However, the rover’s own metallic structure, batteries, drill assembly, cabling, and the mounting geometry of the antenna introduce complex scattering, diffraction, and multi‑path effects that can corrupt the received signal.
To quantify these effects, the team built high‑fidelity electromagnetic models using both finite‑element (FEM) and finite‑difference time‑domain (FDTD) techniques. A complete CAD representation of the rover was imported, and realistic material properties (conductivity, permittivity) were assigned to each component. Validation against laboratory measurements on a scaled‑down rover mock‑up showed agreement within 1.2 dB, confirming the model’s accuracy.
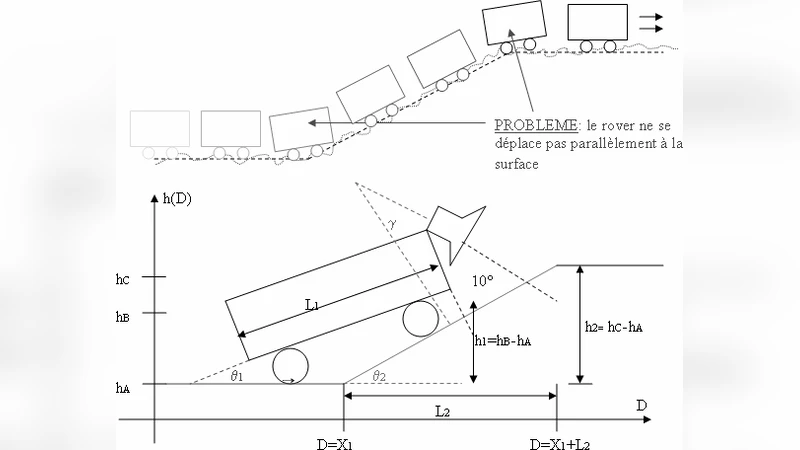
A second major focus is the dynamic disturbance caused by rover motion over uneven Martian terrain. Using high‑resolution orbital imagery and laser altimetry, the authors generated synthetic terrain patches with slopes ranging from 0° to 15°. A rover dynamics simulator provided the resulting chassis pitch and roll, which in turn altered the antenna’s inclination relative to the ground. The study demonstrates that even modest slopes (5°–10°) can tilt the antenna by ±3°, leading to up to 8 dB variation in reflected signal amplitude and a water‑layer thickness estimation error of 0.35 m.
Because simulating the entire rover‑ground system for every meter of travel would be computationally prohibitive, the authors introduced a “dynamic domain decomposition” strategy. The computational domain is split into a static background region (far‑field ground) and a moving forward region that follows the rover. Only the forward region is recomputed at each simulation step, reducing memory consumption by roughly 60 % and cutting runtime by about 45 % while preserving full-wave accuracy. Additionally, a hybrid ray‑tracing / full‑wave approach captures high‑order scattering from the rover’s complex geometry without excessive mesh refinement.
The interference analysis reveals that the rover body can cause signal attenuation ranging from 5 dB to 12 dB across the operational bandwidth, with the most severe degradation occurring when the drill head is within 0.2 m of the antenna. Phase distortions of several tens of degrees are also observed, which would translate into depth‑position errors if left uncorrected.
To mitigate these effects, the authors propose a real‑time correction algorithm. Pre‑flight calibration provides S‑parameters for the rover’s structural scattering; during the mission, onboard inertial sensors deliver the instantaneous antenna tilt. The algorithm computes a correction factor that is applied to the raw radar trace before inversion. Simulated post‑correction data show an average signal‑to‑noise ratio (SNR) improvement of 6 dB and a reduction of water‑layer thickness error to below 0.2 m.
In conclusion, the paper delivers a rigorous electromagnetic framework for assessing and compensating rover‑induced radar disturbances on Mars. The methodology not only enhances the scientific return of the ExoMars WISDOM instrument—by enabling more accurate detection of subsurface water and stratigraphy—but also establishes a generic workflow applicable to future planetary rovers equipped with ground‑penetrating radar. The combination of high‑fidelity modeling, efficient domain decomposition, and real‑time correction represents a significant advance in the field of planetary subsurface remote sensing.
Comments & Academic Discussion
Loading comments...
Leave a Comment