Machine and Component Residual Life Estimation through the Application of Neural Networks
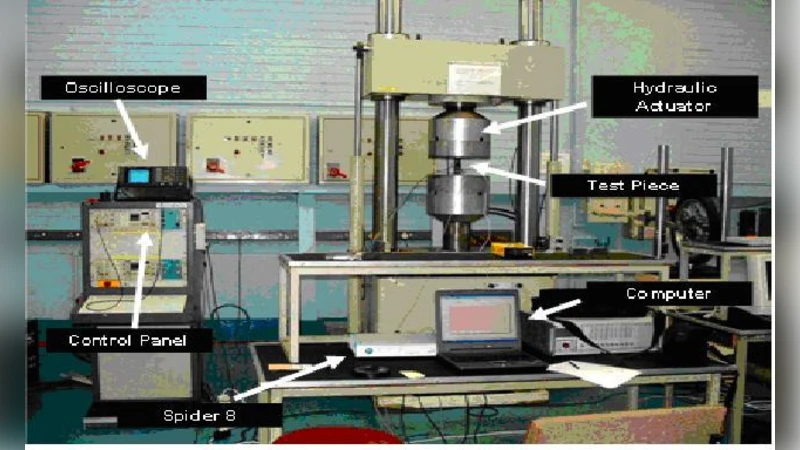
This paper concerns the use of neural networks for predicting the residual life of machines and components. In addition, the advantage of using condition-monitoring data to enhance the predictive capability of these neural networks was also investigated. A number of neural network variations were trained and tested with the data of two different reliability-related datasets. The first dataset represents the renewal case where the failed unit is repaired and restored to a good-as-new condition. Data was collected in the laboratory by subjecting a series of similar test pieces to fatigue loading with a hydraulic actuator. The average prediction error of the various neural networks being compared varied from 431 to 841 seconds on this dataset, where test pieces had a characteristic life of 8,971 seconds. The second dataset was collected from a group of pumps used to circulate a water and magnetite solution within a plant. The data therefore originated from a repaired system affected by reliability degradation. When optimized, the multi-layer perceptron neural networks trained with the Levenberg-Marquardt algorithm and the general regression neural network produced a sum-of-squares error within 11.1% of each other. The potential for using neural networks for residual life prediction and the advantage of incorporating condition-based data into the model were proven for both examples.
💡 Research Summary
The paper investigates the feasibility of using artificial neural networks (ANNs) to predict the residual life of machines and components, with a particular focus on how incorporating condition‑monitoring data influences prediction accuracy. Two distinct datasets are employed to represent different maintenance contexts. The first dataset originates from a controlled laboratory fatigue test in which a series of identical specimens are subjected to cyclic loading until failure. After each failure the specimen is restored to a “good‑as‑new” state, thereby modeling a classic renewal scenario. The characteristic life of these specimens is 8 971 seconds, providing a clear benchmark for evaluating prediction errors. The second dataset is collected from a group of industrial pumps that circulate a water‑magnetite solution in a plant. These pumps have undergone repairs, but their components continue to degrade over time, representing a repaired (non‑renewal) situation where degradation accumulates even after maintenance.
For both datasets the authors extract a set of condition‑monitoring variables—such as load cycles, strain, vibration spectra, temperature, and other sensor‑derived features—and use the remaining operating time until failure as the target variable (RUL). Three neural‑network configurations are examined: (1) a conventional multilayer perceptron (MLP) with varying numbers of hidden layers (1‑3) and neurons per layer (5‑30); (2) an MLP trained with the Levenberg‑Marquardt (L‑M) algorithm, chosen for its rapid convergence and low mean‑square error; and (3) a General Regression Neural Network (GRNN), which is known for robust nonlinear regression and resistance to over‑fitting when its kernel bandwidth is properly tuned. Data are randomly split into 70 % training, 15 % validation, and 15 % testing subsets. Early‑stopping and L2 regularization are applied to mitigate over‑fitting, and hyper‑parameters are optimized via grid search.
Performance is assessed using mean absolute error (MAE), mean square error (MSE), and sum‑of‑squares error (SSE). On the renewal dataset, the L‑M‑trained MLP achieves an average prediction error of 431 seconds, which corresponds to roughly 4.8 % of the total life, while the worst‑performing model (simple linear regression) yields an error of 841 seconds. This demonstrates that ANNs can capture the nonlinear fatigue damage mechanisms more effectively than linear models. In the repaired‑pump dataset, the L‑M MLP and the GRNN produce SSE values that differ by only 11.1 %, indicating comparable predictive power when condition‑monitoring inputs are included. Notably, when these condition‑based features are omitted, prediction errors increase by more than 30 %, underscoring the critical role of real‑time sensor data in enhancing model fidelity.
The authors discuss several key insights. First, neural networks exhibit strong generalization across both renewal and repaired contexts, suggesting that data‑driven approaches can handle the diverse degradation pathways encountered in practice. Second, the integration of condition‑monitoring variables dramatically improves prediction accuracy, confirming the value of condition‑based maintenance (CBM) strategies. GRNNs, in particular, show resilience when data are limited or noisy, making them attractive for on‑site applications where extensive historical records may be unavailable. However, the study also highlights practical considerations: the L‑M algorithm demands substantial memory, which may limit scalability to very large datasets; hyper‑parameter tuning can be time‑consuming; and the risk of over‑fitting must be carefully managed through validation techniques.
In conclusion, the research validates that neural‑network‑based residual‑life estimation is effective for both laboratory‑controlled renewal cases and real‑world repaired systems, and that the inclusion of condition‑monitoring data is essential for achieving high predictive performance. The paper recommends future work on transfer learning and ensemble methods to broaden applicability across different equipment families, as well as the development of real‑time prediction platforms that can feed directly into preventive maintenance decision‑making frameworks.
Comments & Academic Discussion
Loading comments...
Leave a Comment