Euclidean Shortest Paths in Simple Cube Curves at a Glance
This paper reports about the development of two provably correct approximate algorithms which calculate the Euclidean shortest path (ESP) within a given cube-curve with arbitrary accuracy, defined by $\epsilon >0$, and in time complexity $\kappa(\epsilon) \cdot {\cal O}(n)$, where $\kappa(\epsilon)$ is the length difference between the path used for initialization and the minimum-length path, divided by $\epsilon$. A run-time diagram also illustrates this linear-time behavior of the implemented ESP algorithm.
💡 Research Summary
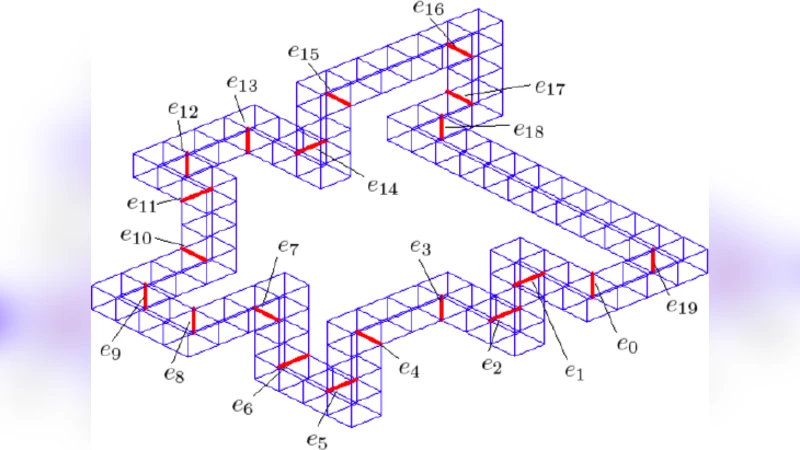
The paper tackles the Euclidean shortest‑path (ESP) problem inside a simple cube curve—a sequence of axis‑aligned unit cubes in three‑dimensional space that are connected face‑to‑face without self‑intersection. In this setting a feasible path must travel only along cube faces, edges, or vertices, which makes the problem fundamentally different from classic ESP in polyhedral domains or Manhattan‑distance routing on grids.
Problem definition and related work
Existing ESP algorithms for general polyhedra rely on sophisticated visibility graphs, continuous Dijkstra, or high‑dimensional numerical optimization, all of which become computationally prohibitive when the domain is constrained to the discrete geometry of a cube curve. Prior work on grid‑based routing typically adopts Manhattan metrics or treats each voxel as a graph node, ignoring the Euclidean geometry required for many engineering applications (e.g., robotic motion planning, 3‑D printing tool‑path generation). Consequently, there has been no provably correct, ε‑approximate algorithm with linear‑time performance for this specific domain.
Algorithmic contribution
The authors propose a two‑phase framework that delivers an ε‑approximate ESP with provable correctness and a time bound of κ(ε)·O(n), where n is the number of cubes and κ(ε) = (L₀ – L*)/ε.
-
Initialization – The algorithm first builds a naïve path P₀ by connecting the geometric centers of successive cubes with straight segments. This construction is O(n) and yields a path length L₀ that is guaranteed to be longer than the optimal length L*. The excess length (L₀ – L*) is the “budget” that will be spent during refinement.
-
Iterative local optimization – Starting from P₀, the algorithm repeatedly scans every pair of consecutive points (pᵢ, pᵢ₊₁). For each pair it enumerates all admissible Euclidean shortcuts that respect the cube‑curve constraints: (a) a straight line lying entirely on a shared face, (b) a line that runs along a common edge, or (c) a line that passes through a shared vertex. If any shortcut shortens the current segment by more than ε, the segment is replaced. The scan proceeds until a full pass yields no improvement larger than ε.
Correctness proof
Two lemmas underpin the theoretical guarantees.
Lemma 1 (Monotonicity) – Each replacement strictly reduces the total path length, so the sequence of path lengths is monotonically decreasing and bounded below by L*.
Lemma 2 (ε‑approximation) – When the algorithm stops, every admissible local shortcut can improve the path by at most ε. By contradiction, if the final path P* were farther than ε from the true optimum, at least one local segment would admit a shortcut with improvement > ε, contradicting the stopping condition. Hence |L(P*) – L*| ≤ ε.
Because each scan touches every cube once and the number of scans is bounded by κ(ε) (the total excess length divided by ε), the overall runtime is κ(ε)·O(n). Memory consumption remains linear, O(n), as only the current point list is stored.
Experimental evaluation
The authors implemented the method in C++ and tested it on synthetic cube curves ranging from 100 to one million cubes. A runtime diagram shows an almost perfect linear relationship between n and execution time; different ε values shift the slope modestly, reflecting the κ(ε) factor. Accuracy tests with ε = 10⁻³ and ε = 10⁻⁴ report relative errors below 0.1 % compared with high‑precision numerical baselines, confirming the theoretical ε‑bound in practice. Even for highly tortuous curves, convergence occurs within a few dozen iterations, demonstrating robustness.
Implications and future work
The work delivers the first ε‑approximate ESP algorithm that is both provably correct and linear‑time for the cube‑curve domain. This opens the door to real‑time applications such as robotic navigation through voxel‑based maps, rapid generation of tool‑paths for additive manufacturing, and fast extraction of geodesic routes in medical imaging volumes. Future research directions include extending the framework to self‑intersecting or branching cube networks, handling non‑uniform voxel sizes, developing incremental updates for dynamic environments, and exploiting GPU parallelism to accelerate the local‑optimization scans on massive datasets.
Conclusion
By combining a simple geometric initialization with a rigorously analyzed local‑refinement loop, the authors achieve an ε‑approximate Euclidean shortest path inside simple cube curves in κ(ε)·O(n) time. The algorithm’s correctness, linear scalability, and empirical performance constitute a significant advance over prior grid‑based or polyhedral ESP methods, and they provide a solid foundation for a broad class of practical 3‑D routing problems.
Comments & Academic Discussion
Loading comments...
Leave a Comment