Cs-Ro
From Edge to Edge: A Flow-Inspired Scheduling Planner for Multi-Robot Systems
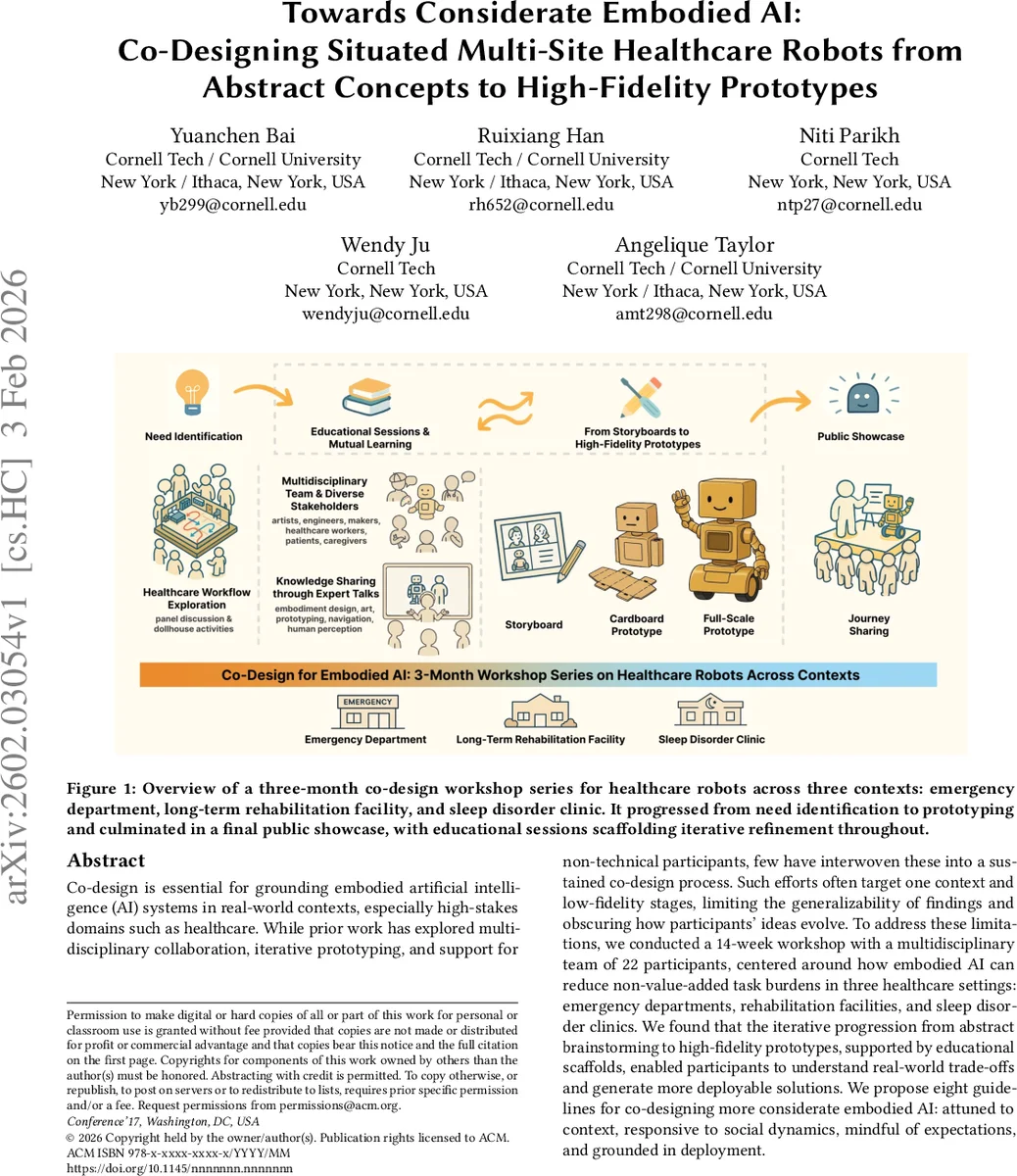
Towards Considerate Embodied AI: Co-Designing Situated Multi-Site Healthcare Robots from Abstract Concepts to High-Fidelity Prototypes

Training and Simulation of Quadrupedal Robot in Adaptive Stair Climbing for Indoor Firefighting: An End-to-End Reinforcement Learning Approach
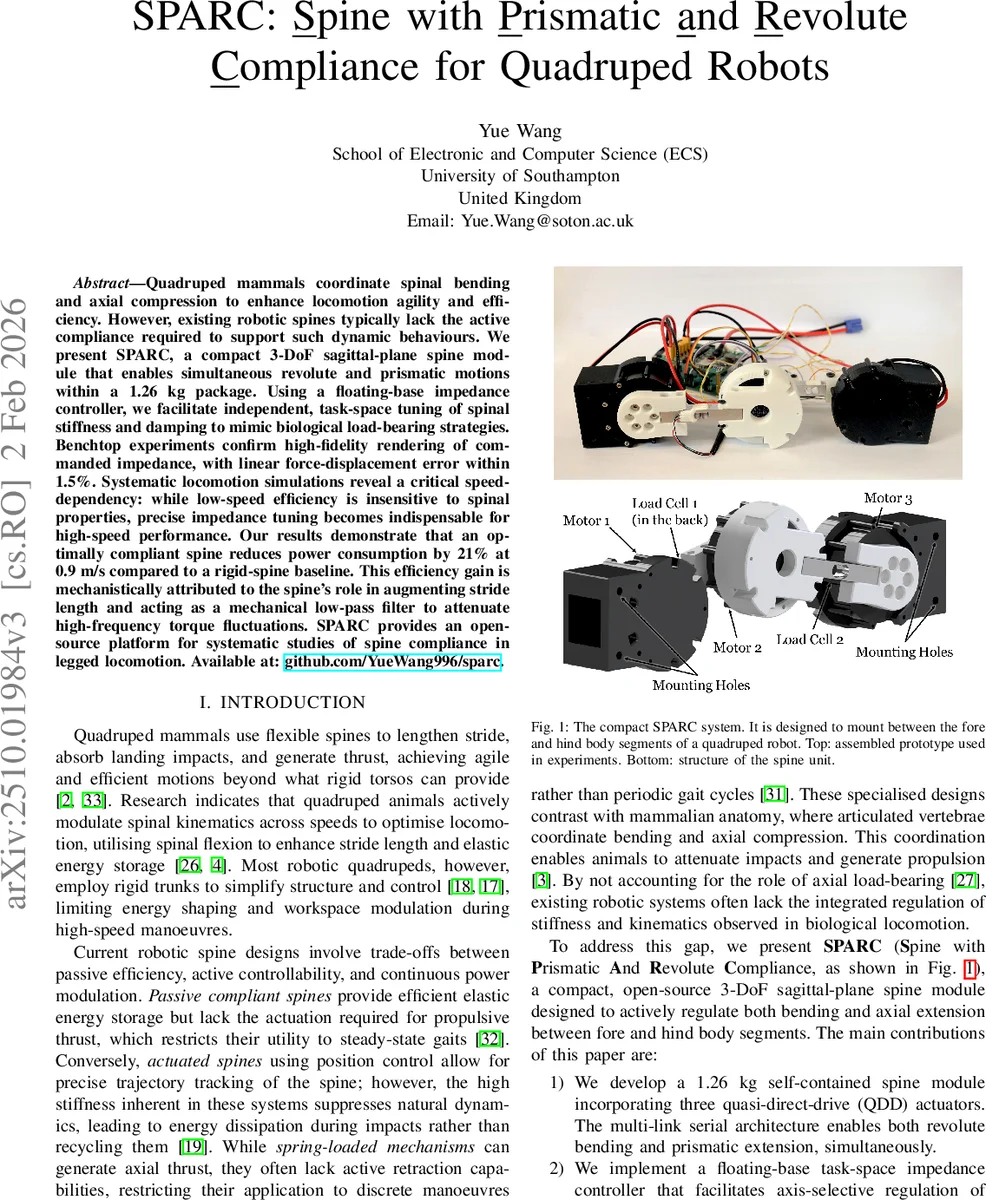
SPARC: Spine with Prismatic and Revolute Compliance for Quadruped Robots

SMapper: A Multi-Modal Data Acquisition Platform for SLAM Benchmarking
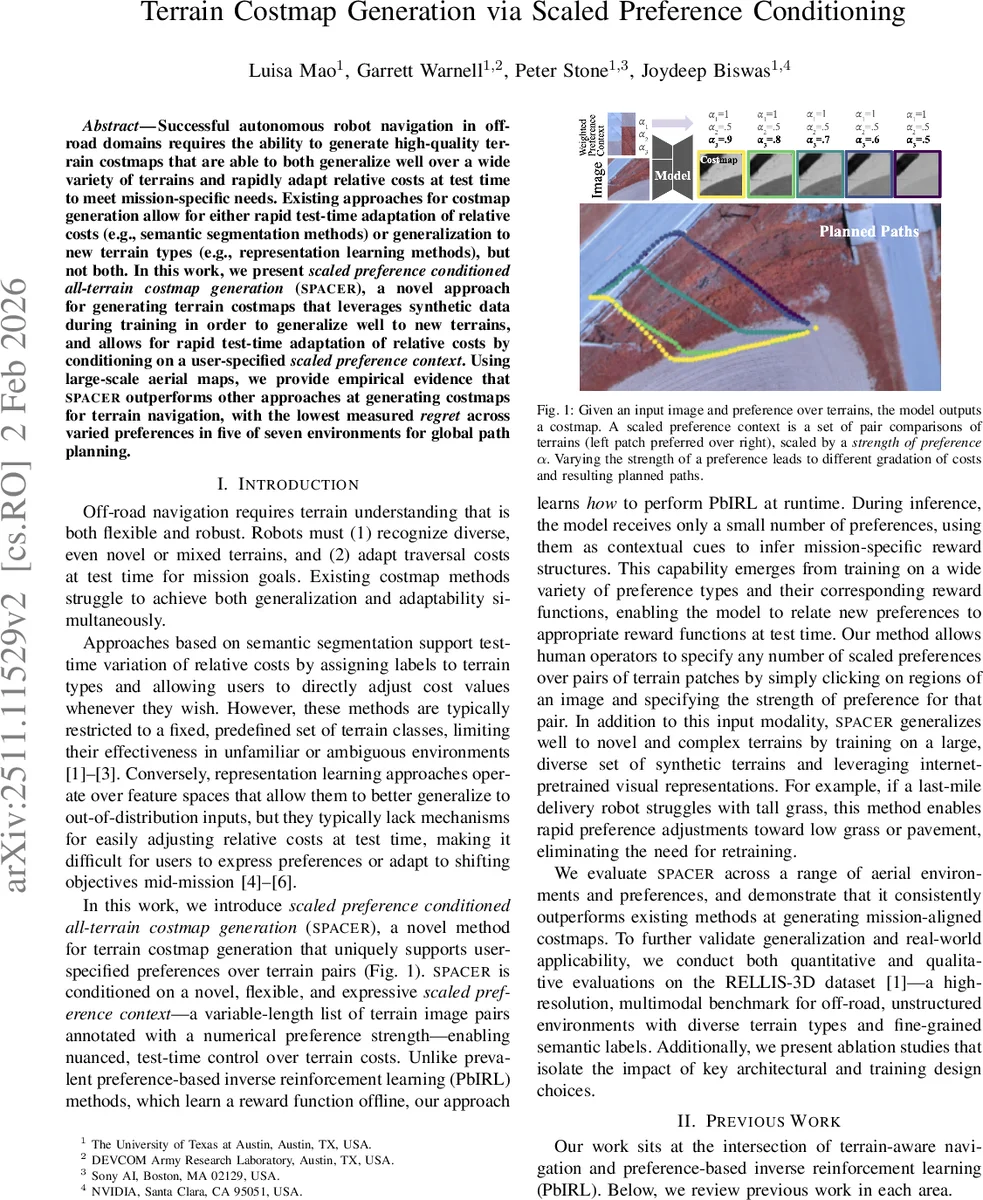
Terrain Costmap Generation via Scaled Preference Conditioning
Optimizing Automated Picking Systems in Warehouse Robots Using Machine Learning
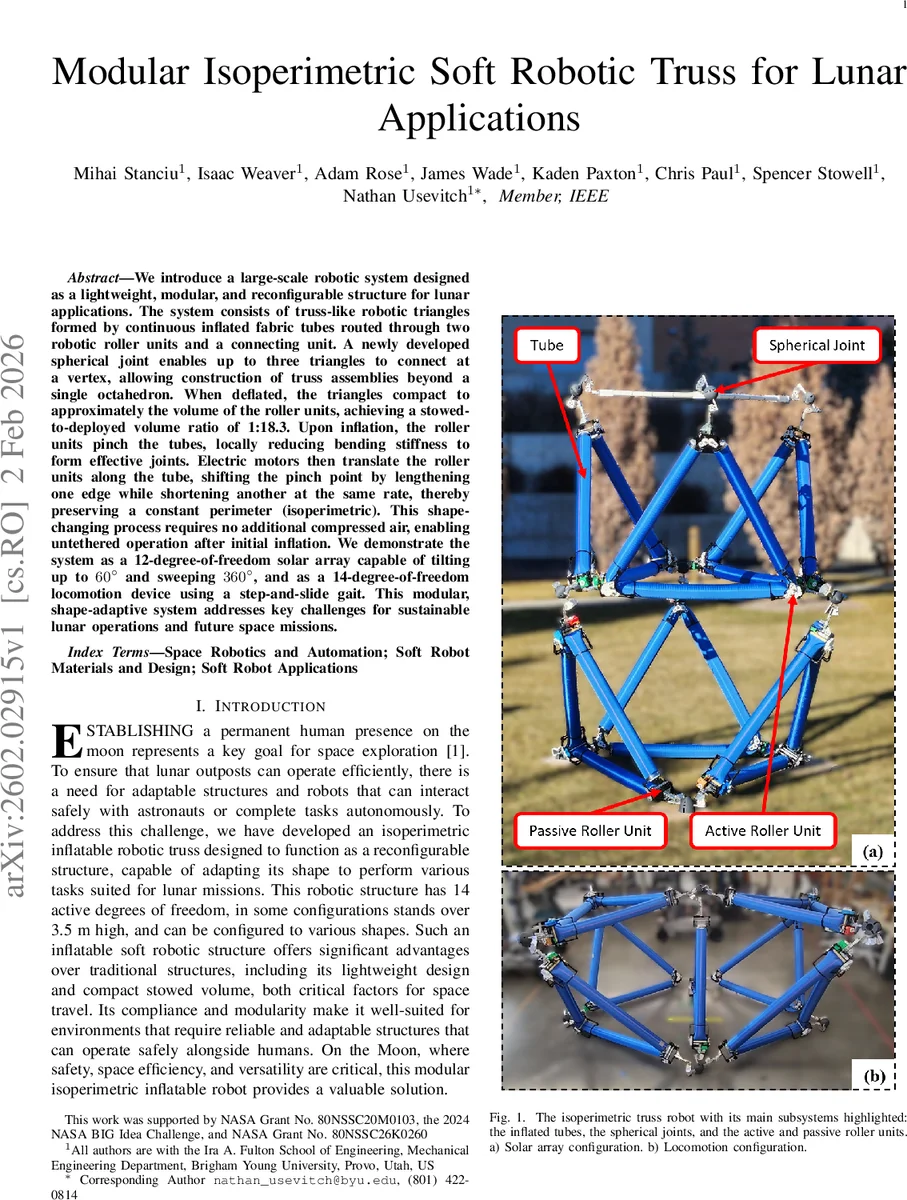
Modular Isoperimetric Soft Robotic Truss for Lunar Applications

Latent Perspective-Taking via a Schrödinger Bridge in Influence-Augmented Local Models
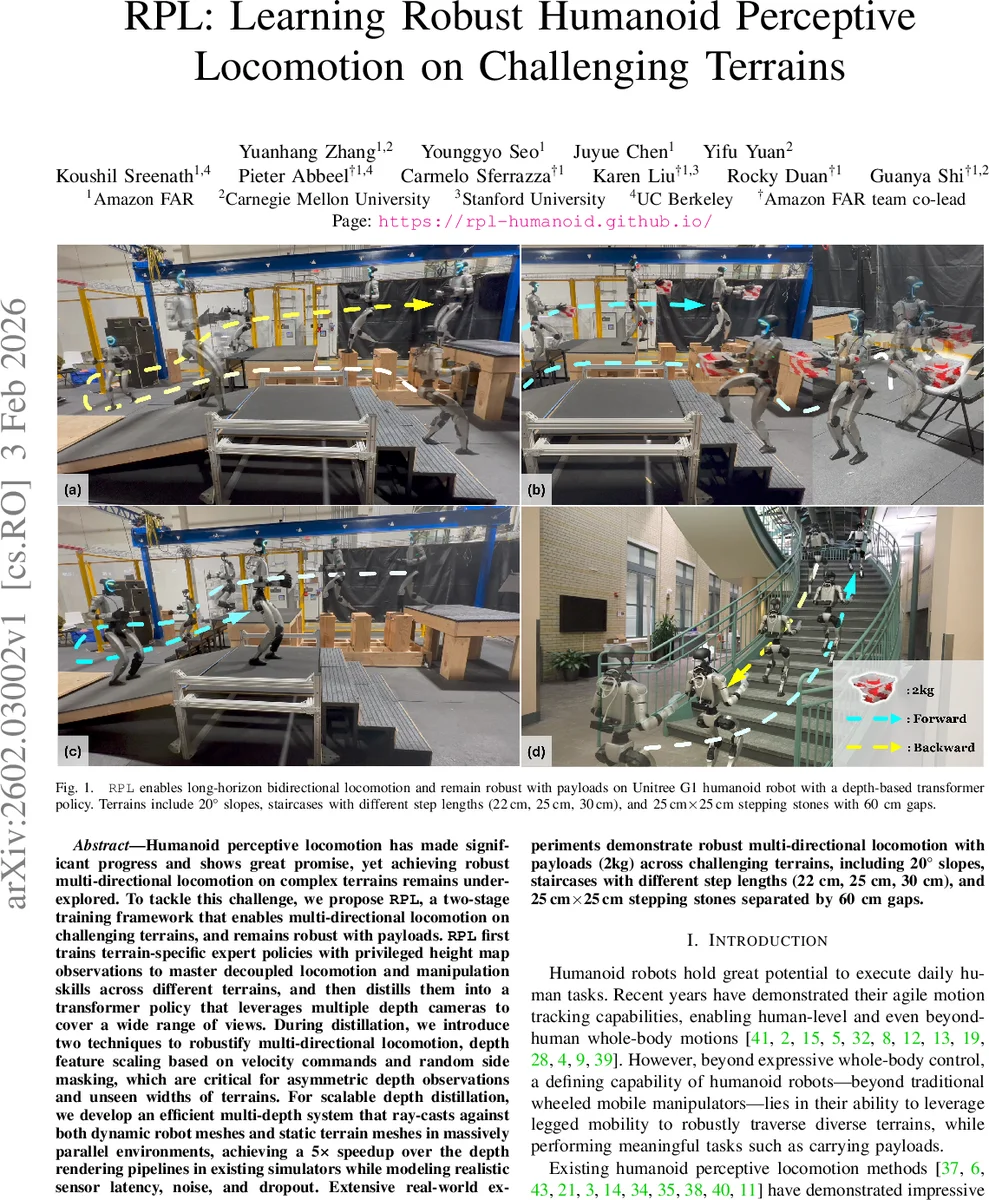
RPL: Learning Robust Humanoid Perceptive Locomotion on Challenging Terrains

Fast Near Time-Optimal Motion Planning for Holonomic Vehicles in Structured Environments
Adaptive Linear Path Model-Based Diffusion
Sub-optimality bounds for certainty equivalent policies in partially observed systems

IMAGINE: Intelligent Multi-Agent Godot-based Indoor Networked Exploration