Cs-Ro
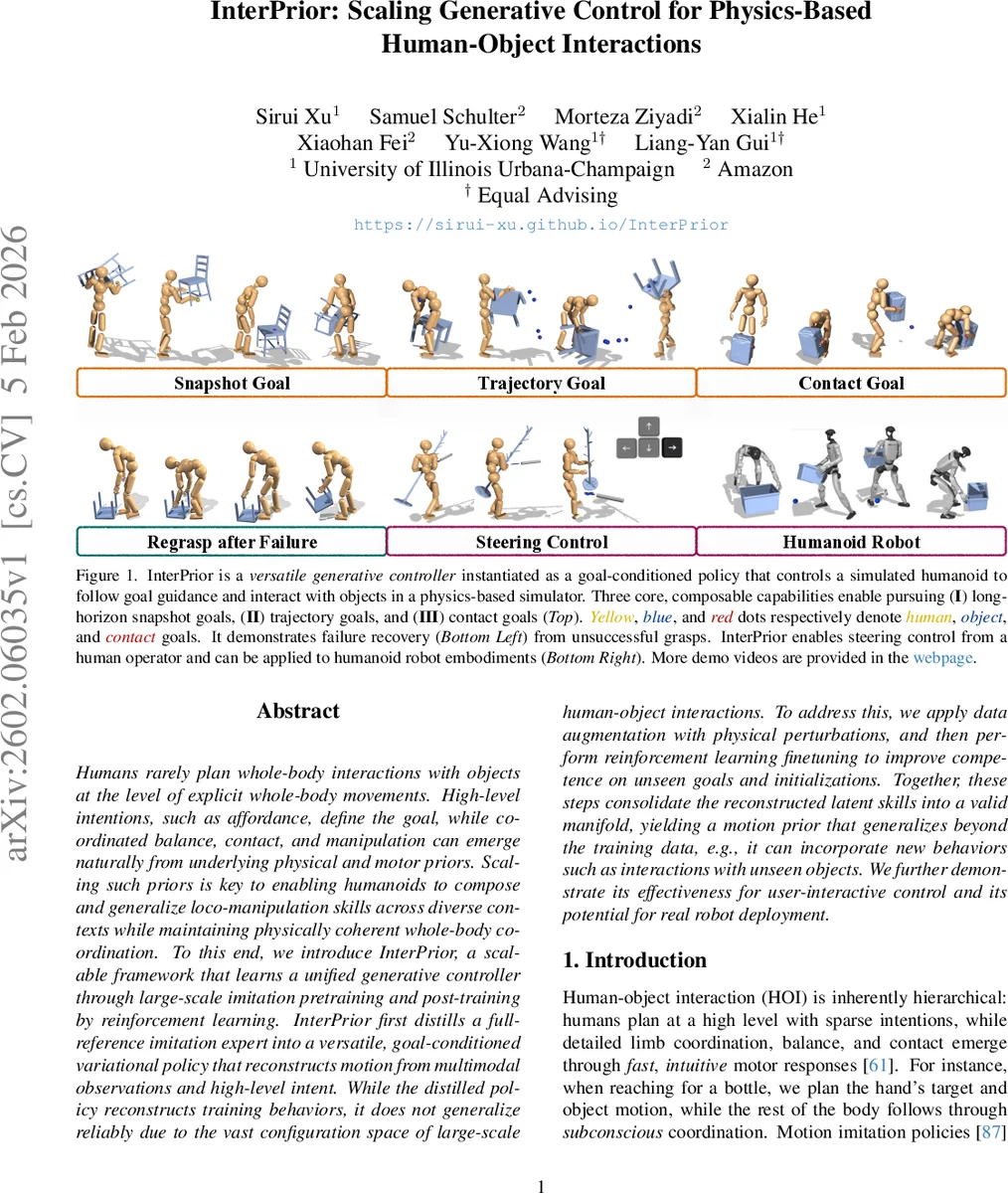
InterPrior: Scaling Generative Control for Physics-Based Human-Object Interactions
LLM4AD: Large Language Models for Autonomous Driving -- Concept, Review, Benchmark, Experiments, and Future Trends

Residual Reinforcement Learning for Waste-Container Lifting Using Large-Scale Cranes with Underactuated Tools
From Bench to Flight: Translating Drone Impact Tests into Operational Safety Limits
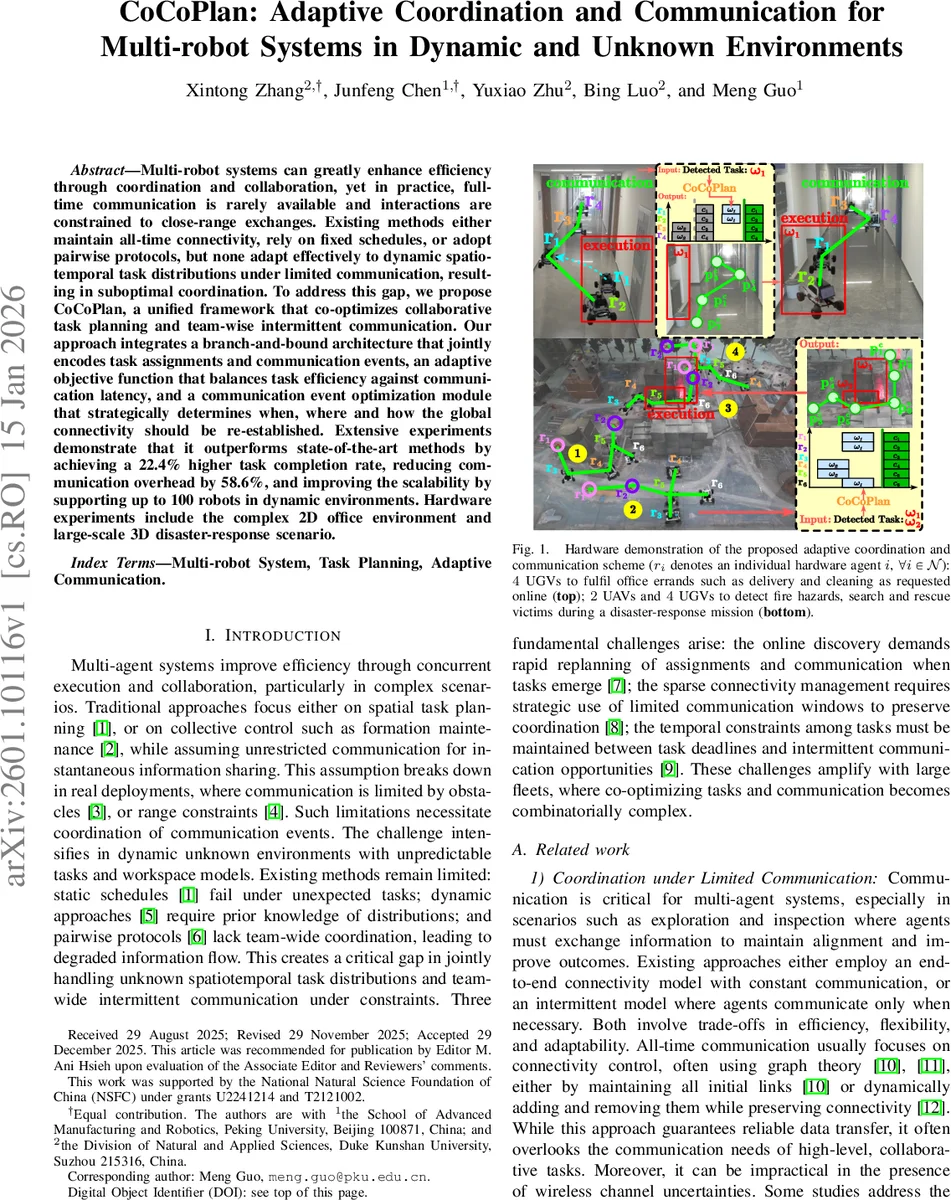
CoCoPlan: Adaptive Coordination and Communication for Multi-robot Systems in Dynamic and Unknown Environments

Dynamic Modeling, Parameter Identification and Numerical Analysis of Flexible Cables in Flexibly Connected Dual-AUV Systems

Active Localization of Unstable Systems with Coarse Information
Safety-critical Control with Control Barrier Functions: A Hierarchical Optimization Framework
Constrained Group Relative Policy Optimization
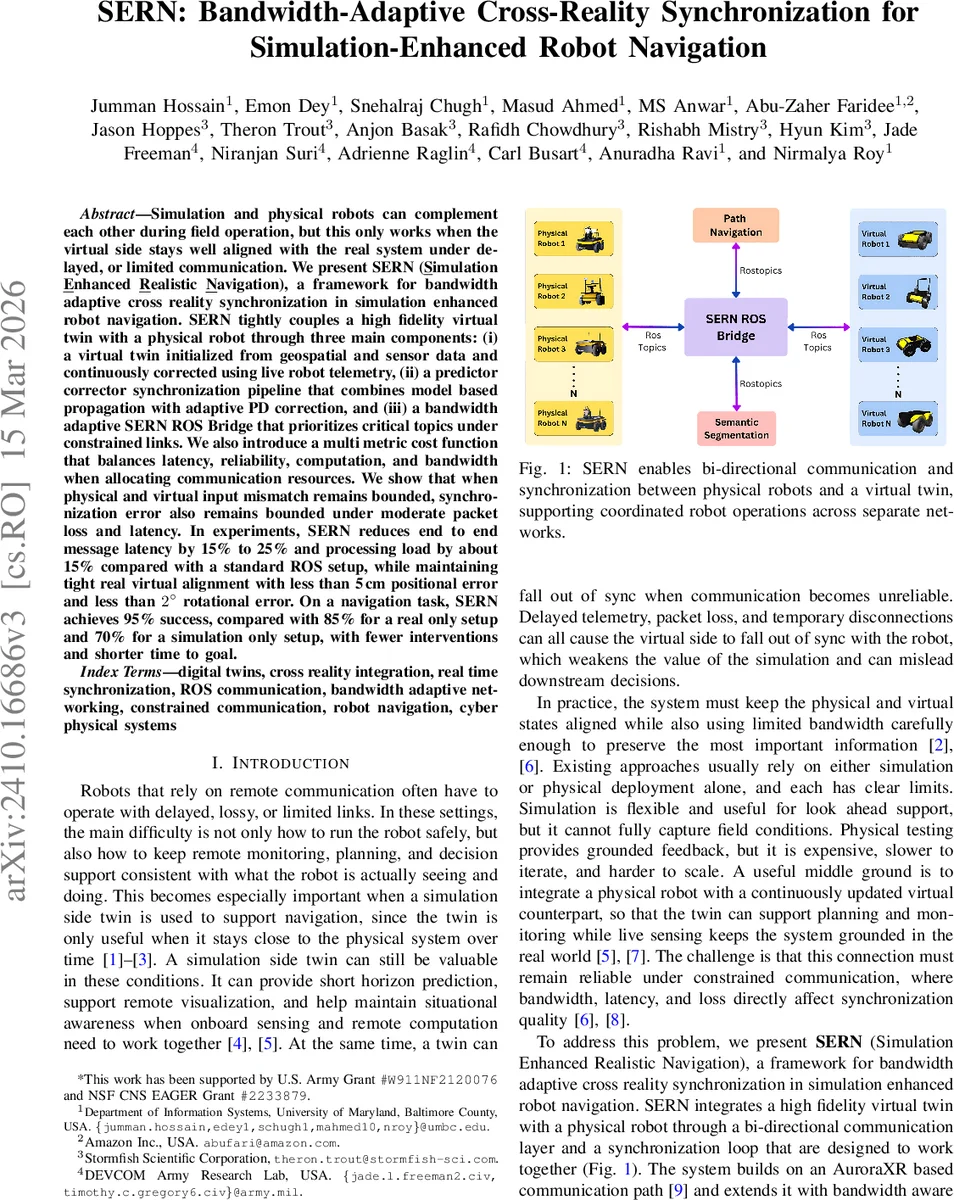
SERN: Bandwidth-Adaptive Cross-Reality Synchronization for Simulation-Enhanced Robot Navigation
HyPlan: Hybrid Learning-Assisted Planning Under Uncertainty for Safe Autonomous Driving

Less Is More: Scalable Visual Navigation from Limited Data

UGotMe: An Embodied System for Affective Human-Robot Interaction

Encoding Tactile Stimuli for Braille Recognition with Organoids

Right-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal
CRISP -- Compliant ROS2 Controllers for Learning-Based Manipulation Policies and Teleoperation
Constraint Manifold Exploration for Efficient Continuous Coverage Estimation
DreamDojo: A Generalist Robot World Model from Large-Scale Human Videos

SuReNav: Superpixel Graph-based Constraint Relaxation for Navigation in Over-constrained Environments

DynaRetarget: Dynamically-Feasible Retargeting using Sampling-Based Trajectory Optimization
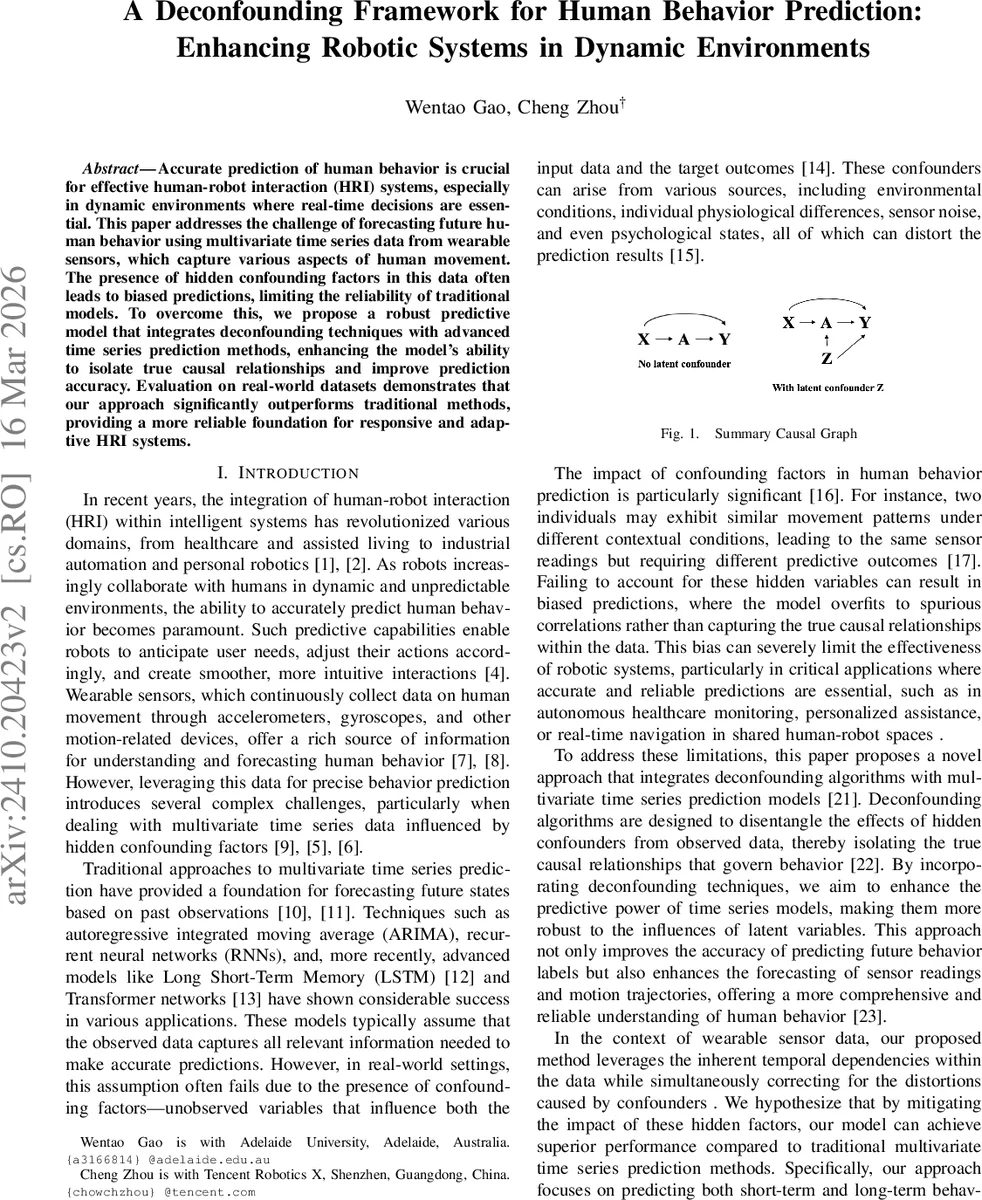
A Deconfounding Framework for Human Behavior Prediction: Enhancing Robotic Systems in Dynamic Environments
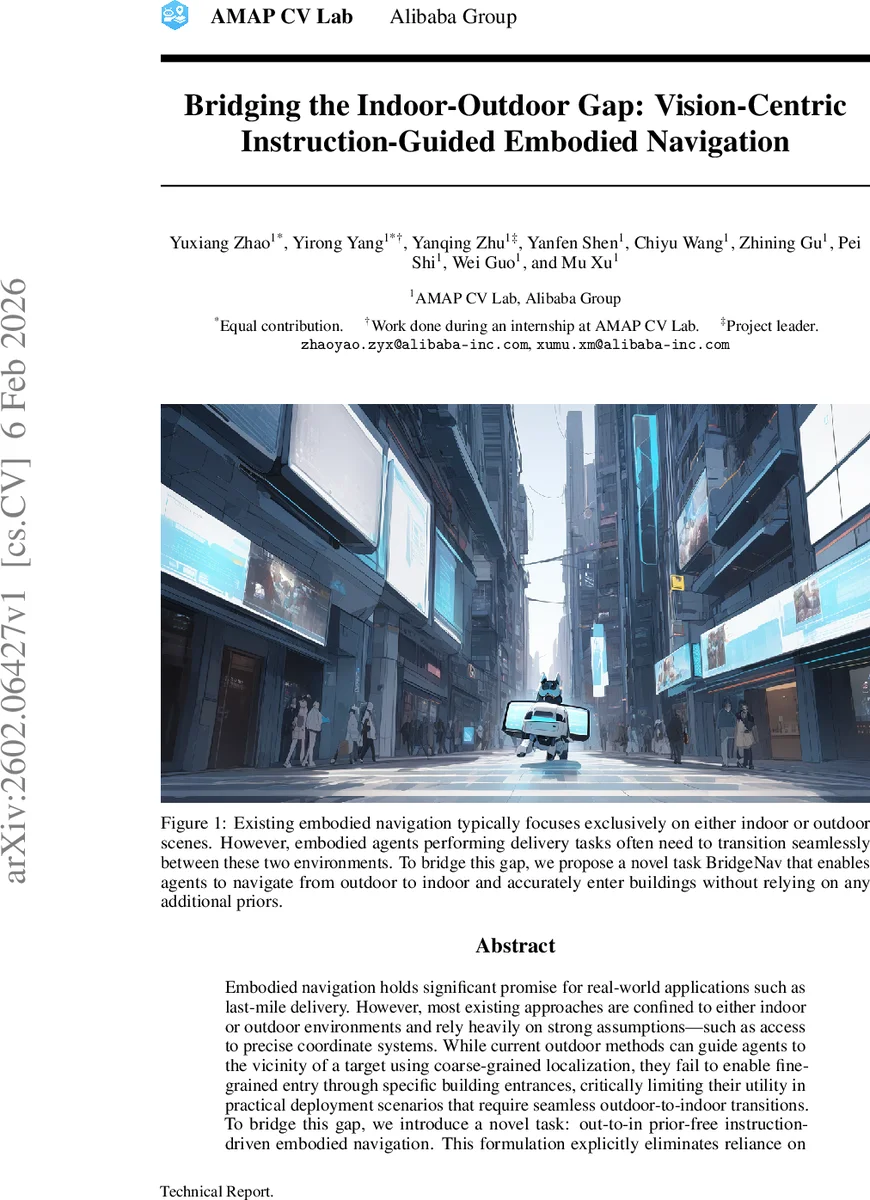
Bridging the Indoor-Outdoor Gap: Vision-Centric Instruction-Guided Embodied Navigation for the Last Meters