공간 의존성 하에서 이상 패치 빠른 위치 추정
본 논문은 공간적으로 의존적인 데이터에서 축에 평행한 다수의 이상 패치를 효율적으로 탐지·위치추정하는 방법을 제안한다. 단일 패치를 위한 Naïve 추정기와 지능형 샘플링 기반 추정기를 설계하고, 이를 확장한 두 단계 절차인 SPLADE를 제시한다. 제한된 신호 강도·경계·패치 간 거리 조건과 최대 p‑모멘트 가정 하에, 추정된 패치 수와 각 패치 경계가 동시에 일관성을 갖는 것을 이론적으로 증명한다. 알고리즘은 전체 격자 크기 |n|에 대해 …
저자: Soham Bonnerjee, Sayar Karmakar, George Michailidis
본 논문은 공간적으로 의존적인 데이터에서 축에 평행한 다수의 이상 패치를 효율적으로 탐지하고 정확히 위치를 추정하는 새로운 방법론을 제시한다. 연구 배경으로는 기존의 스캔 통계 기반 이상 탐지 방법이 독립성 가정을 전제로 하거나, 전체 영역을 분할하는 전역적인 접근에 머물러 국소적인 작은 패치를 정확히 식별하기 어렵다는 점을 들었다. 특히, 다중 패치를 동시에 추정하고 그 경계를 일관되게 복구하는 문제는 아직 충분히 해결되지 않은 과제로 남아 있었다.
논문은 먼저 데이터 모델을 정의한다. d 차원 격자 X_i = μ_i + η_i 에서 μ_i는 정상 영역에서는 상수 μ_0, 이상 패치 I_j 내에서는 평균 변위 δ_j 를 갖는다. η_i는 평균 0의 공간 의존성을 가진 잡음으로, 구체적인 구조는 제한하지 않으며, 최대 p‑모멘트 경계(Assumption 2.1)를 만족하면 된다. 이 가정은 모든 직사각형 영역에 대해 부분합의 p‑노름이 C′|n|^{1/2} 이하임을 의미하며, m‑dependent, SAR, 장거리 의존 등 다양한 실제 모델에 적용 가능함을 Lemma와 Appendix을 통해 증명한다.
다음으로 단일 패치 로컬라이제이션을 다룬다. Naïve 추정기는 모든 가능한 직사각형 후보를 평가해 평균 차이가 가장 큰 영역을 선택한다. 이 방법은 통계적 일관성을 보장하지만, 후보 수가 O(|n|^{2}) 에 달해 실시간 적용이 어렵다. 이를 해결하기 위해 저자들은 “지능형 샘플링” 알고리즘을 고안한다. 각 차원별로 로그‑스케일로 후보 경계 위치를 서브샘플링하고, 다중 스케일 검정을 통해 후보 집합을 급격히 축소한다. 이후 남은 후보에 대해 전체 격자를 한 번만 스캔해 최적 영역을 찾음으로써 전체 복잡도를 O(|n|) 으로 낮춘다. 이 알고리즘은 신호 강도 ‖δ‖ ≥ C√{log |n|/|I|} 조건 하에 최소 |I| 크기의 패치를 정확히 복구한다는 이론적 보장을 제공한다.
다중 패치 상황을 위해 제안된 SPLADE 절차는 두 단계로 구성된다. 1단계에서는 전체 격자에 대해 전역적인 스캔 검정을 수행해 존재하는 패치 수 K̂ 를 추정한다. 여기서는 단일 패치 추정기를 반복 적용하되, 이미 탐지된 영역을 마스크하고 남은 영역에 대해 다시 검정한다. 2단계에서는 각 추정된 패치에 대해 독립적인 경계 추정을 수행하고, 패치 간 최소 거리 Δ_{sep} 와 경계와 데이터 가장자리 간 거리 b_{sep} 조건을 이용해 상호 간섭을 최소화한다. 주요 이론적 결과는 다음과 같다. (i) 신호 강도 ‖δ_j‖ 가 C√{log |n|/|I_j|} 보다 크고, (ii) 각 패치가 경계·다른 패치와 충분히 떨어져 있을 때, K̂ → K 와 Ĩ_j → I_j (집합 수렴) 가 확률 1로 이루어진다. 또한, Gaussian approximation을 이용해 임계값을 정밀히 보정함으로써 복잡한 의존 구조에서도 유의 수준을 정확히 유지한다.
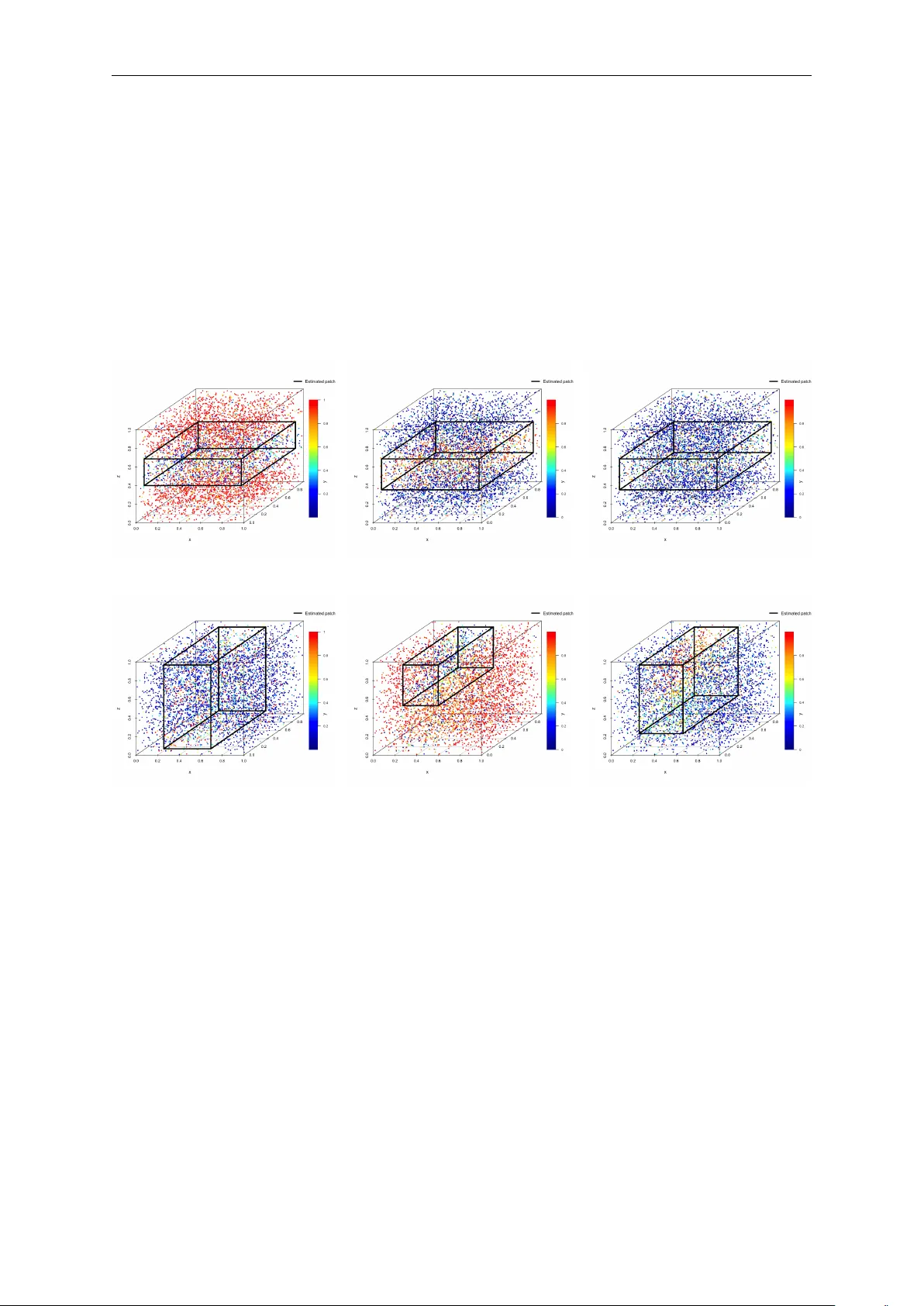
실험 부분에서는 합성 데이터와 실제 데이터를 모두 사용했다. 합성 실험에서는 다양한 p‑값, 상관 구조(AR(1), SAR, 장거리 의존)와 패치 크기·간격을 변형시켜 SPLADE가 기존 O(|n|^{3/2}) 알고리즘(DCAR T) 및 최신 DPLS‑SAD에 비해 5~20배 빠른 실행 시간을 보이며, Hausdorff 거리와 Adjusted Rand Index 측면에서도 우수함을 확인했다. 실제 영상 감시 데이터(CA VIAR)에서는 서로 가까이 위치한 두 사람을 각각의 직사각형 경계로 정확히 구분했으며, 기존 SaTScan 기반 방법은 과도한 클러스터링으로 하나의 큰 영역만을 탐지했다. 부록의 3차원 섬유 매체 실험에서도 SPLADE가 3D 격자에 그대로 적용 가능함을 보여, 확장성 및 적용 범위가 넓음을 입증한다.
결론적으로, 이 논문은 (1) 일반적인 공간 의존성을 허용하는 최소 p‑모멘트 가정, (2) O(|n|) 시간 복잡도의 선형 스캔 알고리즘, (3) 다중 패치 수와 경계에 대한 동시 일관성 보장을 동시에 만족하는 최초의 프레임워크를 제공한다. 이는 실시간 감시, 환경 모니터링, 공공 안전 등에서 국소적인 이상 현상을 빠르고 정확하게 탐지해야 하는 실제 문제에 직접적인 활용 가치를 가진다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기