불확실성 기반 라벨 재균형으로 CPS 안전 모니터링 강화
U‑Balance는 UAV와 같은 사이버‑물리 시스템(CPS)에서 발생하는 극심한 클래스 불균형을 해결하기 위해 행동 불확실성을 활용한다. 먼저 GatedMLP 기반 불확실성 예측기를 학습해 각 텔레메트리 윈도우의 분포형 운동 특성을 요약하고 불확실성 점수를 산출한다. 이후 불확실성‑가이드 라벨 재균형(uLNR) 기법으로 높은 불확실성을 보이는 안전 라벨을 확률적으로 위험 라벨로 전환해 소수 클래스에 경계 샘플을 추가한다. 최종 안전 예측기는 …
저자: John Ayotunde, Qinghua Xu, Guancheng Wang
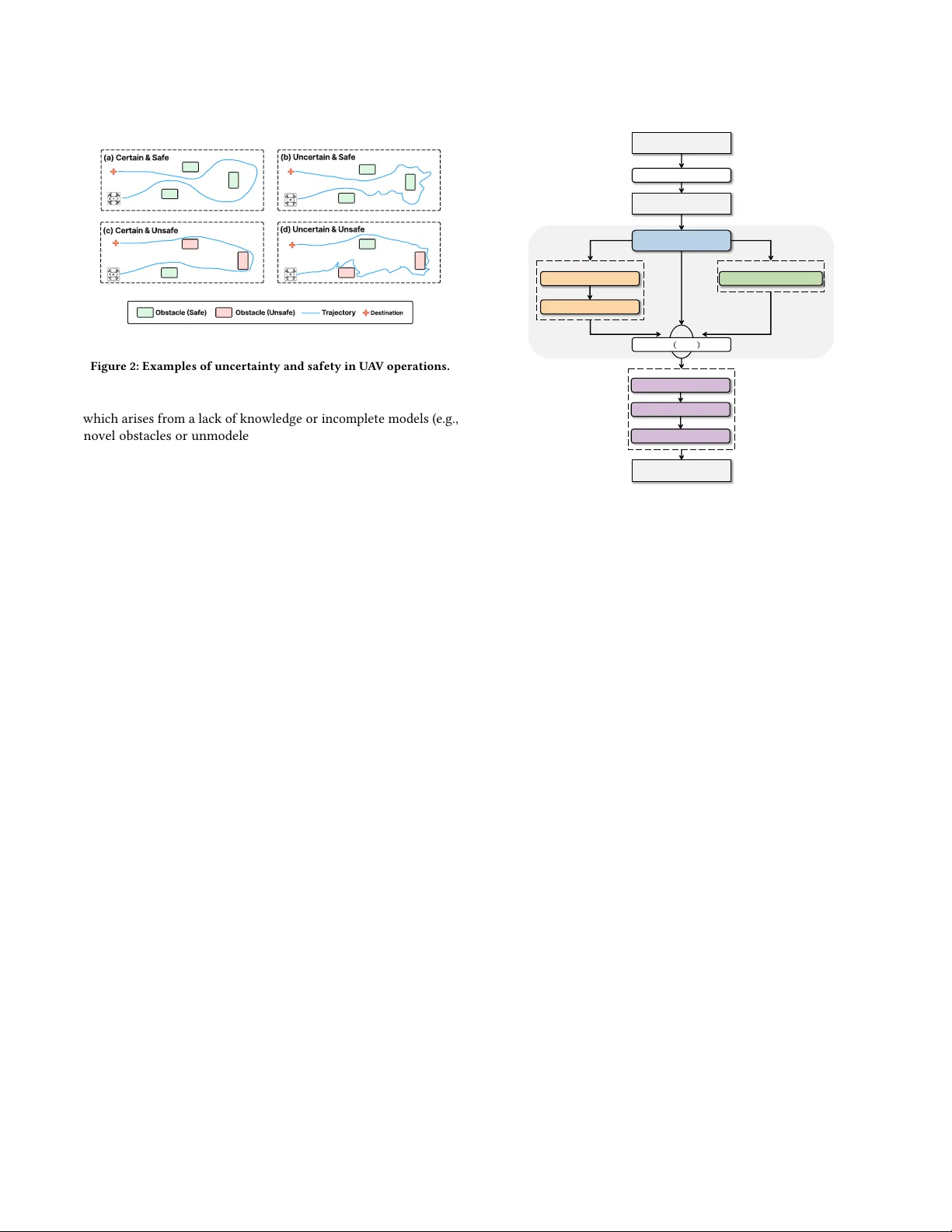
본 논문은 사이버‑물리 시스템(CPS) 특히 무인항공기(UAV)와 같은 복합 시스템에서 안전 모니터링을 수행할 때 직면하는 ‘극심한 클래스 불균형’ 문제를 해결하고자 한다. 실제 운용 데이터에서는 안전한 비행이 압도적으로 많아(46:1) 위험(unsafe) 사례가 극히 드물다. 이러한 불균형은 지도 학습 기반 안전 예측 모델이 다수 클래스에 편향되어 위험 상황을 놓치는 결과를 초래한다. 기존의 SMOTE, 클래스 가중치, 라벨 노이즈 재균형(LNR) 등은 시계열 텔레메트리 데이터에 적용했을 때 비현실적인 합성 샘플 생성, 과적합, 혹은 도메인 특화 부족 등의 한계를 보인다.
논문은 두 가지 핵심 아이디어를 결합한 U‑Balance 프레임워크를 제안한다. 첫 번째 단계는 ‘행동 불확실성(behavioral uncertainty)’을 정량화하는 불확실성 예측기이다. 각 텔레메트리 윈도우는 4개의 운동 채널(heading, x, y, z)로 구성되며, 각 채널에 대해 평균, 표준편차, 최소, 최대를 계산해 16‑차원 분포형 특성 벡터 d_t 를 만든다. 이 벡터는 선형 투영 후 ReLU 활성화를 거쳐 차원 p 로 확장되고, 이후 GatedMLP 블록을 통과한다. GatedMLP은 GRU에서 영감을 얻은 게이팅 메커니즘을 사용해 채널별 중요도를 동적으로 조절한다. 이렇게 얻어진 출력은 시그모이드 레이어를 거쳐 0~1 사이의 불확실성 점수 u_t 를 산출한다. 실험에서는 이 점수가 높은 윈도우가 실제 위험 상황과 양의 상관관계를 보이며, 불확실성 자체가 위험 예측에 유용한 보조 신호임을 확인한다.
두 번째 단계는 ‘불확실성‑가이드 라벨 재균형(uLNR)’이다. 기존 LNR은 이미지 데이터에서 라벨을 확률적으로 뒤바꾸어 소수 클래스를 보강했지만, 시계열 데이터에 그대로 적용하면 경계 샘플이 충분히 식별되지 않는다. U‑Balance는 불확실성 점수를 활용해, 안전 라벨을 가진 샘플 중 u_t 가 사전 정의된 임계값(예: 상위 10% 불확실성) 이상인 경우 일정 확률 p_flip 으로 라벨을 위험으로 전환한다. 이 과정은 새로운 합성 샘플을 만들지 않으면서도, 위험 클래스에 ‘정보량이 높은 경계 샘플’을 직접 추가한다.
재균형된 데이터셋 D_bal 은 이후 안전 예측기(예: LSTM, Transformer 기반) 학습에 사용된다. 안전 예측기의 입력은 원본 텔레메트리 윈도우이며, 라벨은 uLNR에 의해 조정된 안전/위험 라벨이다.
실험은 Khatiri 등(2020)이 제공한 대규모 UAV 데이터셋을 사용했으며, 안전:위험 비율이 46:1인 상황을 그대로 유지했다. 주요 결과는 다음과 같다. ① 행동 불확실성과 안전 라벨 간의 피어슨 상관계수는 0.42로, 중간 정도의 양의 상관관계를 나타냈다. ② uLNR을 적용한 후 LSTM 기반 안전 예측기의 F1 점수는 0.806으로, 기존 최고 성능(클래스 가중치 적용 LSTM, F1 ≈ 0.663) 대비 14.3 %p 상승했다. ③ 불확실성 정보를 단순히 피처로 결합하는 early/late fusion 방식보다 uLNR이 일관적으로 우수했으며, 이는 라벨 수준에서 불확실성을 활용하는 것이 더 효과적임을 의미한다. ④ Ablation 실험에서 (a) GatedMLP 기반 불확실성 예측기를 제거하면 F1가 0.73으로 감소하고, (b) uLNR을 SMOTE, 클래스 가중치, 기존 LNR 등으로 교체하면 F1가 0.58~0.68 사이로 급락한다. 이는 두 구성 요소가 서로 보완적으로 작용함을 입증한다. ⑤ 추론 시간은 기존 안전 예측기와 거의 동일했으며, 불확실성 예측기와 라벨 재조정 단계가 실시간 모니터링에 큰 부하를 주지 않는다.
논문의 주요 기여는 다음과 같다. 1) 행동 불확실성을 정량화하는 GatedMLP 기반 예측기 설계, 2) 불확실성을 활용한 라벨 재균형(uLNR) 메커니즘 제안, 3) 시계열 CPS 데이터에 특화된 재샘플링 전략을 통해 극심한 클래스 불균형을 효과적으로 완화하고 안전 예측 성능을 크게 향상시킨 점이다. 이 접근법은 UAV뿐 아니라 로봇, 스마트 그리드, 자동차 등 다양한 CPS 도메인에도 일반화 가능성이 높으며, 불확실성 정보를 라벨 수준에서 활용하는 새로운 패러다임을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기