비인간 로봇의 정신적 해석을 위한 멘탈리즘 인터페이스
본 논문은 비인간형 로봇에 대해 의도적 행동을 고정하고, 대형 언어 모델(LLM)을 이용해 동일 행동을 정신적, 목적론적, 기계론적 설명으로 변환하는 실험 플랫폼을 제안한다. 이를 통해 언어적 프레이밍이 인간의 정신 상태 귀속( intentional stance) 형성에 미치는 영향을 정량적으로 조사할 수 있다.
저자: Giulio Pisaneschi, Pierpaolo Serio, Estelle Gerbier
본 논문은 인간이 비인간형 로봇에 대해 정신적 상태(믿음, 욕구, 의도)를 귀속하는 과정을 언어적 프레이밍을 통해 조작하고 측정하는 실험 플랫폼을 제안한다. 서두에서는 인간이 일상적으로 행동을 ‘의도적 자세’를 통해 설명한다는 점을 강조하고, 기존 HRI 연구가 주로 인간형 로봇의 외형적 인간화나 설계‑기계적 설명에 의존해 왔으며, 이는 정신적 귀속을 언어적 요인과 분리하기 어렵다는 한계를 지적한다. 따라서 로봇의 외형을 비인간으로 고정하고, 설명 레이어만을 다양화함으로써 언어가 의도적 자세 형성에 미치는 영향을 순수하게 탐구하고자 한다.
관련 연구 파트에서는 인간‑중심 AI, LLM 기반 내적 독백, 그리고 의도적 자세와 설계‑물리적 자세를 구분하는 기존 실험들을 정리한다. 특히 iCub 등 인간형 로봇을 이용한 인스턴스 테스트(IST)와 비인간 로봇을 이용한 움직임·예측 연구를 비교하면서, 현재까지는 언어적 프레이밍 자체를 실험 변수로 삼은 연구가 부족함을 강조한다.
이론적 배경에서는 Dennett의 ‘의도적 자세’, ‘마음 이론(Theory of Mind)’, 그리고 ‘민속심리(Folk Psychology)’를 정리하고, 정신 상태가 물리적 구현과 무관하게 기능적 역할에 의해 정의된다는 점을 강조한다. 이를 바탕으로 ‘사회적 해석 가능성(social interpretability)’을 로봇이 민속심리적 용어로 스스로를 설명할 때 달성된다고 정의한다. 또한 의도적 자세와 도덕적·언어적 자세를 구분하여, 제안된 플랫폼이 진정한 의도적 귀속을 도덕·언어적 귀속과 분리할 수 있음을 설명한다.
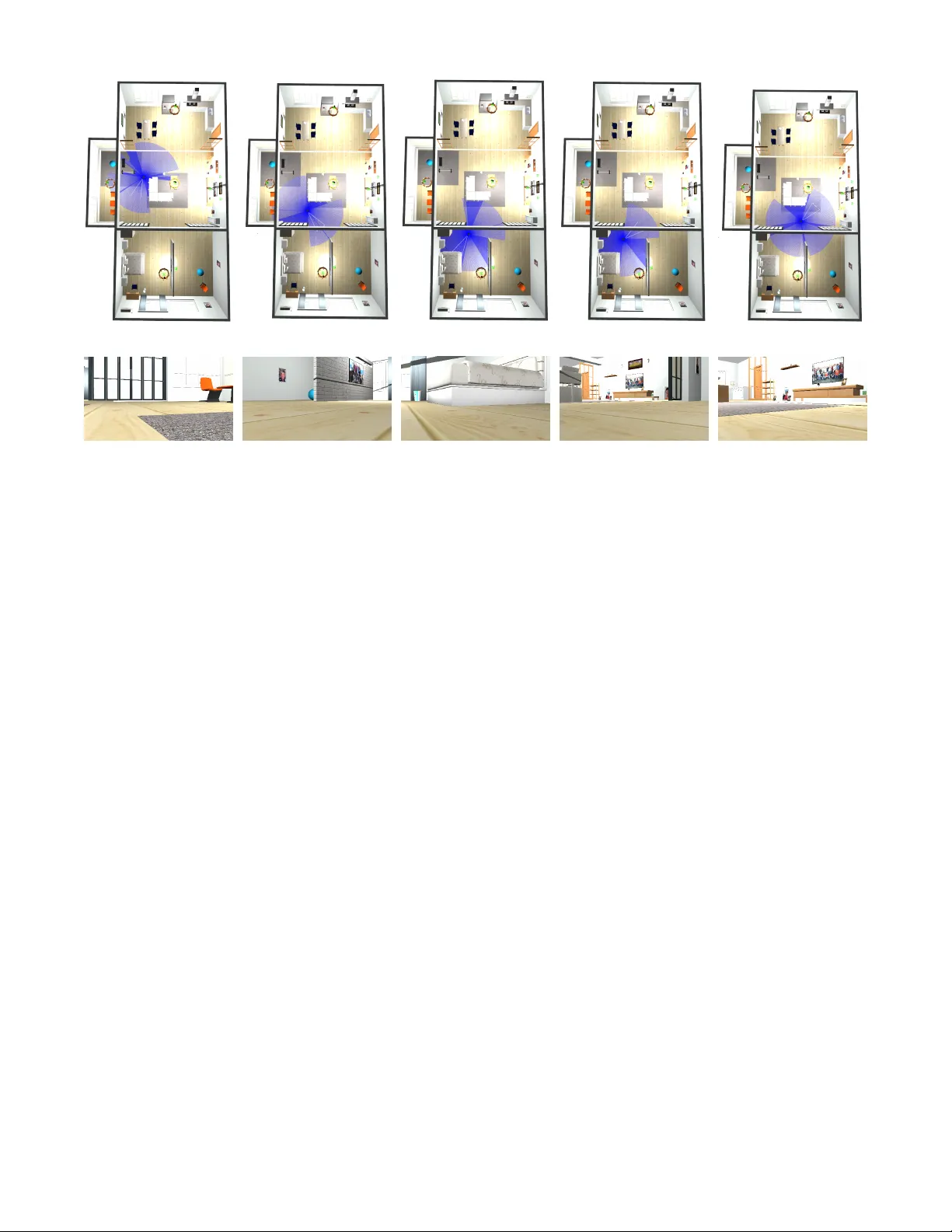
플랫폼 설계 섹션에서는 전체 아키텍처를 상세히 제시한다. 로봇은 ROS2 기반 시뮬레이션 환경(예: 평면, 서점)에서 움직이며, 내부 상태는 환경·로봇·사용자·내비게이션 네 개의 서브스페이스로 구성된 복합 상태공간 S로 표현된다. BDI 모델을 차용해 믿음(B), 욕구(D), 의도(I)를 각각 튜플 형태로 저장하고, 이벤트 E와 행동 집합 A(이동, 대화)를 정의한다. 행동 선택 정책 π는 현재 상태와 이벤트를 LLM에 입력해 프레임‑조건화된 자연어 설명을 생성하도록 설계되었다.
핵심적인 ‘설명 프레임’은 agentive(정신적), teleological(목적론적), mechanistic(기계적) 세 가지이며, 프레임 선택 함수 ϕ는 상황에 따라 적절한 프레임을 결정한다. 예를 들어 로봇이 충전소로 이동할 때, agentive 프레임은 “나는 배터리가 부족하다고 믿고 충전하고 싶다”라고 설명하고, teleological 프레임은 “충전을 목표로 이동한다”, mechanistic 프레임은 “전원 관리 모듈을 활성화하고 전진한다”와 같이 서술한다. 이러한 변환은 행동 자체를 변형하지 않으며, 피험자는 동일 비디오와 함께 서로 다른 설명을 접하게 된다.
구현 부분에서는 ROS2와 Python 기반의 LLM 인터페이스를 결합하고, 프롬프트 템플릿을 설계해 각 프레임에 맞는 어휘와 구조를 강제한다. 또한 두 개의 카메라 뷰(플랜 뷰와 정면 뷰)를 제공해 시점 차이가 의도적 귀속에 미치는 영향을 탐색한다. 실험 데이터셋은 비디오와 해당 비디오에 연결된 전체 대화 로그(LLM 응답 포함)로 구성되며, 이를 통해 ‘프레임이 없는 순수 행동’과 ‘프레임이 포함된 설명’ 사이의 차이를 정량화한다.
논의에서는 이 플랫폼이 (1) 비인간 로봇을 통해 외형적 인간화 효과를 최소화하고, (2) LLM을 이용해 설명 프레임을 정밀하게 조작함으로써 언어가 의도적 자세 형성에 미치는 인과관계를 밝히는 데 유용함을 강조한다. 또한, 정신적 귀속을 측정하기 위한 설문·행동 지표(예: 의도적 귀속 점수, 신뢰도 평가)를 제시하고, 향후 실제 로봇에 적용해 센서 노이즈와 실시간 인터랙션을 고려한 확장 가능성을 논한다. 한계점으로는 시뮬레이션 기반이라는 점, LLM의 편향·일관성 문제, 프레임 선택의 주관적 요소 등을 들며, 이를 보완하기 위한 사전 파일럿 실험과 모델 검증 절차가 필요함을 언급한다.
결론에서는 ‘로봇이 스스로 정신적 언어로 자신을 설명할 때 인간은 이를 받아들일 준비가 되는가’라는 핵심 질문에 대한 실험적 접근법을 제공함으로써, HRI 연구에서 설명 프레임과 인간의 마음 이론 사이의 상호작용을 체계적으로 탐구할 수 있는 기반을 마련했다고 정리한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기