자율 착륙을 위한 LARD 2.0: 데이터 다양성 확대와 ODD 기반 벤치마크
본 논문은 기존 LARD 데이터셋의 한계를 극복하고, Bing Map·ArcGIS·X‑Plane·Flight Simulator 등 다중 소스를 활용한 LARD V2 데이터셋을 구축한다. 운영 설계 영역(ODD)을 다중 활주로 공항과 확장 ODD(경계 허용)까지 포괄하도록 정교화하고, ODD‑인식 객체 검출 지표(e‑mAP)를 제안해 최신 탐지 모델을 벤치마크한다.
저자: Yassine Bougacha, Geoffrey Delhomme, Mélanie Ducoffe
본 논문은 자율 착륙 시스템 개발에 필수적인 활주로 검출을 위한 데이터와 평가 체계를 전면 개편한 LARD 2.0을 제안한다. 기존 LARD V1은 Google Earth Studio만을 이용해 이미지 생성했으며, 단일 활주로 공항과 제한된 접근 구간에 국한된 ODD를 정의했다. 이러한 한계는 (1) 이미지 다양성 부족, (2) 현실적인 착륙 시나리오 부재, (3) 다중 활주로 환경 미지원, (4) 표준화된 벤치마크 부재 등으로 이어졌다.
첫 번째 주요 기여는 데이터 다양성 확대이다. 저자들은 Cesium 기반 인터페이스를 구축해 Google Earth, Bing Map, ArcGIS 등 세 가지 위성 영상 레이어와 X‑Plane, Microsoft Flight Simulator 두 개의 고품질 시뮬레이터를 연동하였다. 동일한 .yaml 시나리오 파일을 사용해 각 소스에서 이미지와 메타데이터를 일관되게 생성함으로써, 소스 간 좌표 정합 문제를 보정하는 절차를 제시한다. 보정 과정은 (i) 고정 고도에서 카메라를 배치해 활주로 전경을 촬영, (ii) 자동 코너 검출을 위한 YOLOv11 기반 피아노 마크 검출기 학습, (iii) 이미지 메타데이터와 코너 픽셀 좌표를 이용한 역투영으로 고정밀 위도·경도 좌표를 산출하는 4단계로 구성된다. 이를 통해 각 데이터 소스별 전용 고정밀 활주로 데이터베이스를 구축하고, 수 미터 이하의 오차로 이미지와 라벨을 정합시켰다.
두 번째 기여는 ODD의 정교화 및 확장이다. 기존 ODD는 -6000 m ~ -280 m 구간의 수평·수직 경로 각도와 피치만을 제한했으며, 다중 활주로 공항을 고려하지 않았다. LARD 2.0은 (a) 접근 콘을 세 구간(‑6000 ~ ‑4500 m, ‑4500 ~ ‑2500 m, ‑2500 ~ ‑280 m)으로 나누어 각 구간별 요·롤 범위를 구체화하고, (b) 전 세계 상위 300개 공항 중 이미지 품질 기준을 통과한 260개 공항(다중 활주로 포함)을 선정해 활주로별 라벨링 체계를 정의하였다. 또한 ‘Extended ODD’라는 개념을 도입해 정상 ODD 경계 외의 근접 포즈(예: 경로 편차, 비정상 자세)를 허용 범위로 명시하고, 이 영역에 대한 라벨을 별도 클래스(Extended ODD)로 구분한다. 이렇게 정의된 ODD는 실제 착륙 접근 시나리오와 더 가까운 환경을 제공하며, 모델이 경계 상황에서도 견고하게 동작하는지를 평가할 수 있게 한다.
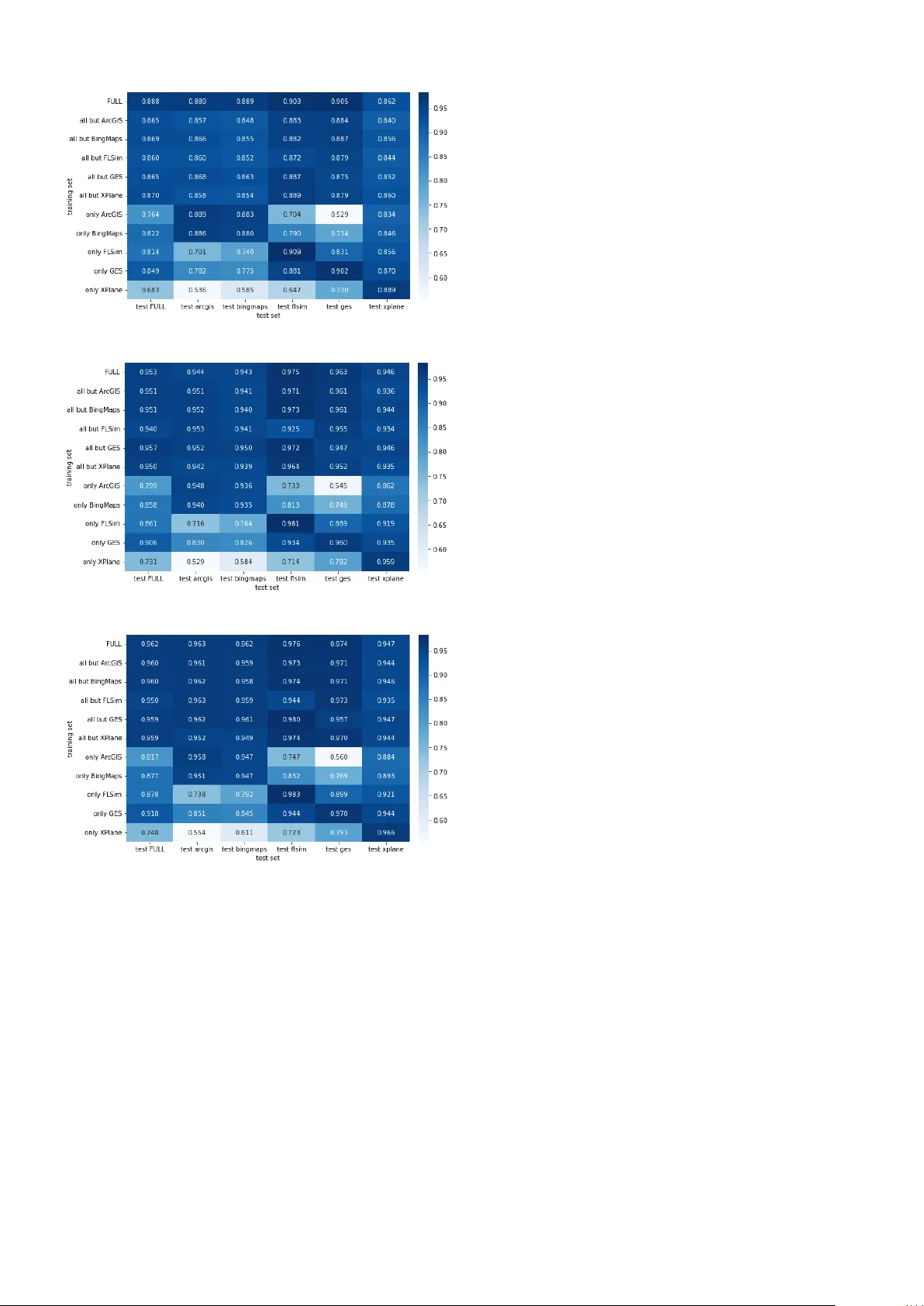
세 번째 기여는 ODD‑aware 벤치마크 프레임워크와 새로운 평가 지표(e‑mAP)이다. 기존 객체 검출 평가는 단일 클래스 mAP만을 제공했으나, 활주로 검출은 다중 인스턴스와 ODD 구분이 핵심이다. e‑mAP는 ‘In‑ODD’와 ‘Extended‑ODD’ 두 클래스를 각각 평가한 후 가중 평균을 산출한다. 이를 통해 (1) Extended ODD를 포함한 학습이 경계 상황 복원력에 미치는 영향, (2) 단일 소스 vs. 다중 소스 학습 효과, (3) leave‑one‑out 실험을 통한 각 소스의 기여도 등을 정량화한다. 실험에서는 YOLOv11, Faster‑RCNN, EfficientDet, RetinaNet 등 최신 탐지 모델 4종을 LARD V2 데이터셋에 적용하였다. 결과는 다중 소스 전체 학습이 가장 높은 e‑mAP(≈0.78)를 기록했으며, Extended ODD를 포함한 학습이 경계 포즈에서 10 % 이상 높은 검출률을 유지함을 보여준다. 반면, Extended ODD를 제외하고 학습한 모델은 경계 상황에서 급격히 성능이 저하되는 경향을 보였다.
데이터와 코드, 라벨링 툴, 벤치마크 스크립트는 모두 GitHub에 공개되어 있어, 연구자들이 동일한 환경에서 재현·비교·확장이 가능하도록 설계되었다. 논문은 또한 향후 연구 방향을 제시한다. 첫째, 실제 항공기의 ADS‑B 기록을 활용해 실시간 시나리오를 생성하고, 시뮬레이터와 실제 비행 데이터를 교차 검증한다. 둘째, 날씨·조명·구름 등 도메인 변이를 포함한 도메인 적응 학습을 적용해 모델의 일반화 능력을 강화한다. 셋째, 검출 결과를 기반으로 한 실시간 포즈 추정 및 제어 루프와의 연계 검증을 수행해, 완전한 자율 착륙 파이프라인을 구축한다.
요약하면, LARD 2.0은 (1) 다중 소스 이미지 생성 파이프라인, (2) 다중 활주로·확장 ODD 정의, (3) ODD‑aware e‑mAP 벤치마크라는 세 축을 통해 자율 착륙 연구에 필요한 데이터·평가·재현성을 획기적으로 향상시킨다. 이는 향후 항공기 자율 착륙 시스템의 실용화와 국제 인증 과정에서 표준 데이터셋 및 평가 기준으로 활용될 잠재력을 가진다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기