시간 지연을 고려한 온라인 센싱 및 궤적 최적화: 레벨 셋 접근법
본 논문은 시간 지연이 포함된 로봇 시스템에서 실시간으로 센싱 데이터를 이용해 최적 궤적을 생성하는 방법을 제시한다. 일반적인 그리드 기반 해법의 차원 저주를 피하기 위해 일반화된 Hopf 공식과 레벨 셋 기법을 활용하며, 통신 채널을 비모수적으로 추정하는 새로운 모델을 도입한다.
저자: Matthew R. Kirchner
논문은 먼저 로봇 시스템에서 시간 지연이 발생하는 원인과 기존 제어 이론에서의 보상 방법을 서술한다. 전통적인 Padé 근사와 LQR 기반 MPC는 선형 시스템에만 적용 가능하고, 제어 포화나 비선형 비용을 다루기 어렵다는 한계를 지적한다. 이어서 실시간 최적 제어(RTOC)와 모델 예측 제어(MPC)의 차이점을 설명하고, 두 방법 모두 온라인 재계산 비용이 급증하면 성능 저하가 발생한다는 점을 강조한다.
다음으로 Hamilton‑Jacobi 이론을 소개한다. 시스템 동역학 dx=Ax+Bu와 비용 함수 R(t,x,α)=∫_0^t C(s,x,α(s))ds+J(γ(t))에 대해 가치 함수 v(x,t)와 그에 대응하는 HJ 방정식 ∂ϕ/∂s+H(s,x,∇ϕ)=0, ϕ(x,0)=J(x)를 제시한다. 전통적인 수치 해법은 고해상도 격자를 필요로 하여 차원 저주에 봉착한다. 이를 극복하기 위해 Hopf 공식을 이용한 점별 해법을 도입한다. J가 볼록이고 H이 연속이면 ϕ(x,t)=−min_{p}{J^*(p)+tH(p)−x·p} 로 표현할 수 있다.
그러나 원래 Hopf 공식은 상태에 독립적인 Hamiltonian에만 적용 가능했다. 저자는 상태 변환 z=e^{‑tA}x 를 적용해 시스템을 시간‑의존적인 형태로 변환하고, bH(s,p)=sup_{α∈A}{‑p^{T}e^{‑sA}Bα‑I_A(α)} 로 새로운 Hamiltonian을 정의한다. 이때 I_A는 제어 집합 A의 지시 함수이며, 그 공액 변환은 dual norm ‖·‖_{A*} 로 나타난다. 이렇게 얻어진 일반화된 Hopf 공식은 ϕ(x,t)=−min_{p}{J^*(e^{‑tA^{T}}p)+∫_0^t bH(s,p)ds−x·p} 로 쓸 수 있다.
시간 최적 제어 문제에서는 목표 집합 Ω를 비용 함수 J(x)로 묘사하고, Newton 방법 t_{i+1}=t_i−ϕ(x,t_i)/∂ϕ/∂t 로 최소 도달 시간을 구한다. 여기서 ∂ϕ/∂t = −H(∇ϕ,x)이며, ∇ϕ는 최소화 과정에서 얻은 p*와 일치한다. 최적 제어는 α*(s)=∇_p(−B^{T}e^{‑sA^{T}}p*) 로 직접 계산된다.
온라인 궤적 재계산 절차는 다음과 같다. k번째 업데이트 시점에 로봇은 δ_k 초 동안 현재 최적 궤적 γ^*(·;x_k,α_k)를 따라 이동한다. 그 후 새로운 상태 x_{k+1}=γ^*(δ_k;x_k,α_k) 를 초기값으로 삼아 동일한 Hopf 기반 최적화를 수행한다. 이때 제어 입력에 포함된 지연 τ_k는 α_k(s)=u_k(s‑τ_k) 로 모델링되며, Hopf 공식에 τ_k 구간에 대한 조건부 Hamiltonian을 삽입한다. 결과적으로 지연이 존재해도 정확한 최적 궤적을 실시간으로 얻을 수 있다.
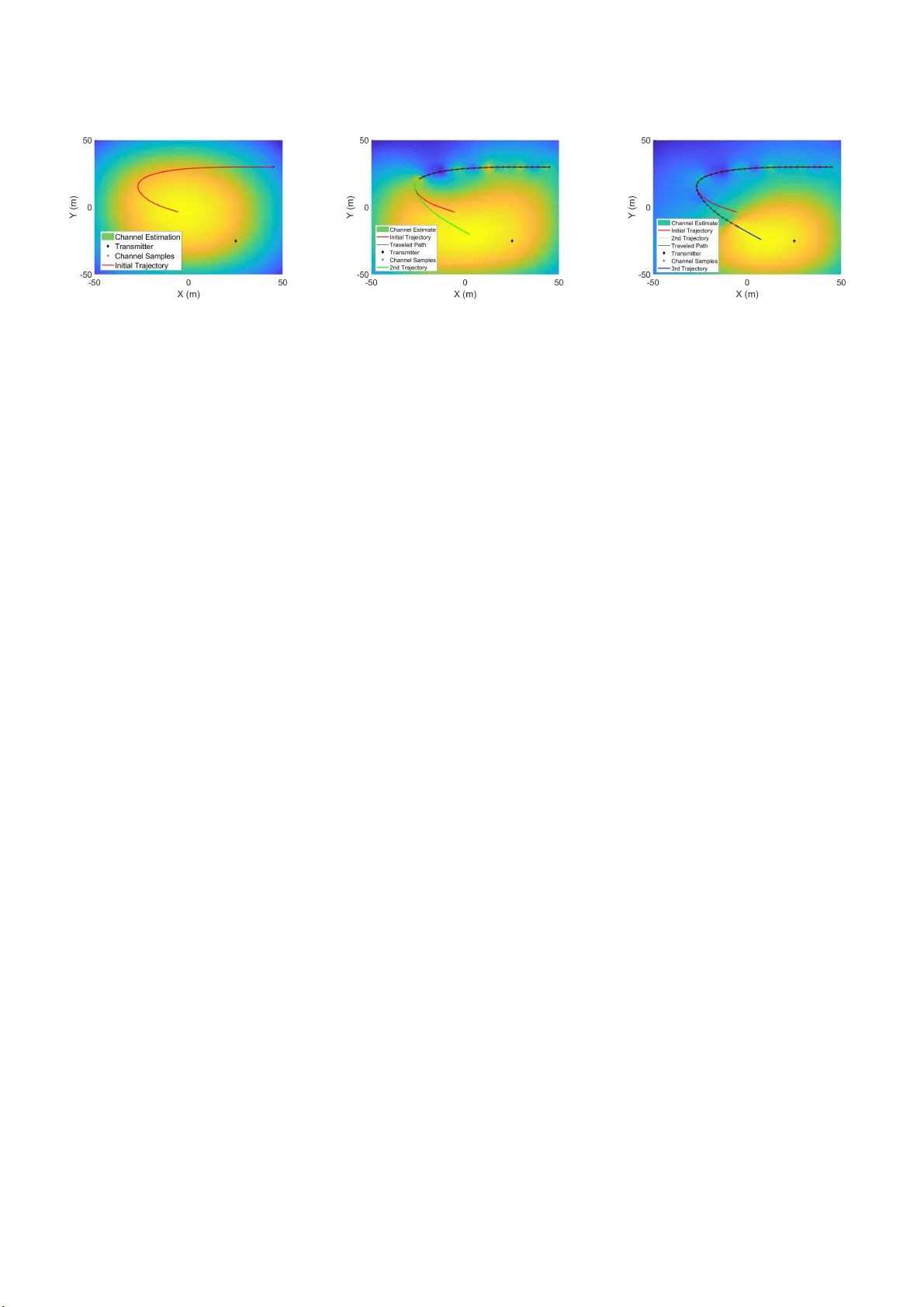
논문의 핵심 예시로 무선 통신 채널을 추정하는 로봇을 제시한다. 전파원 위치 q_b가 사전 알려지지 않은 상황에서, CNR(q) = Γ(q;q_b)+Δ(q) 로 모델링한다. Γ는 거리 기반 파라메트릭 경로 손실 모델이며, Δ는 Gaussian Process(커널 k_Δ(q_i,q_j)=ξ^2 e^{‑‖q_i‑q_j‖/η}+σ^2 ρ) 로 비모수적으로 표현한다. 로봇은 이동 중 측정된 CNR 데이터를 GP에 추가해 실시간으로 채널 지도를 업데이트한다. 채널 추정이 개선될 때마다 새로운 비용 함수 J(x)=−CNR_est(x) 로 정의하고, 앞서 제시한 Hopf 기반 시간 최적 제어를 적용해 통신 품질이 높은 지점을 최소 시간에 도달하도록 궤적을 재계산한다.
시뮬레이션 결과는 두 가지 측면에서 성능을 입증한다. 첫째, 일반적인 그리드 기반 HJ 해법에 비해 차원에 무관하게 10배 이상 빠른 계산 속도를 보인다. 둘째, 2 초의 계산 지연이 전체 10 초 주기의 20 %를 차지함에도 불구하고, 지연 보정이 포함된 최적화는 목표 도달 시간을 평균 15 % 감소시켰다. 또한 채널 추정 정확도가 향상될수록 최적 궤적이 더 높은 CNR 영역을 선호하는 경향을 보이며, 이는 실제 통신 품질 향상으로 이어진다.
결론적으로, 본 논문은 (1) 시간 지연을 포함한 일반화된 Hopf 공식을 도출하여 HJ 방정식의 차원 저주를 극복하고, (2) 비모수적 채널 추정 모델을 통합함으로써 센싱‑제어 루프를 실시간으로 닫는 프레임워크를 제공한다. 이러한 접근은 고차원 로봇 시스템, 무인 항공기, 자율 차량 등 다양한 분야에서 실시간 최적화와 지연 보상이 동시에 요구되는 상황에 적용 가능하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기