안전 탐색을 위한 강건 회귀 기반 제어
본 논문은 순차 제어 문제에서 안전하게 데이터를 수집하기 위해, 공변량 이동을 고려한 딥 강건 회귀 모델을 제안한다. 모델은 목표 상태에 대한 불확실성 구간을 직접 예측하고, 일반화 및 데이터 교란에 대한 이론적 경계를 제시한다. 이를 통해 제어 시스템의 안전성과 안정성을 보장하면서, 기존 가우시안 프로세스 기반 방법보다 적은 튜닝으로 더 효율적인 탐색을 달성한다.
저자: Anqi Liu, Guanya Shi, Soon-Jo Chung
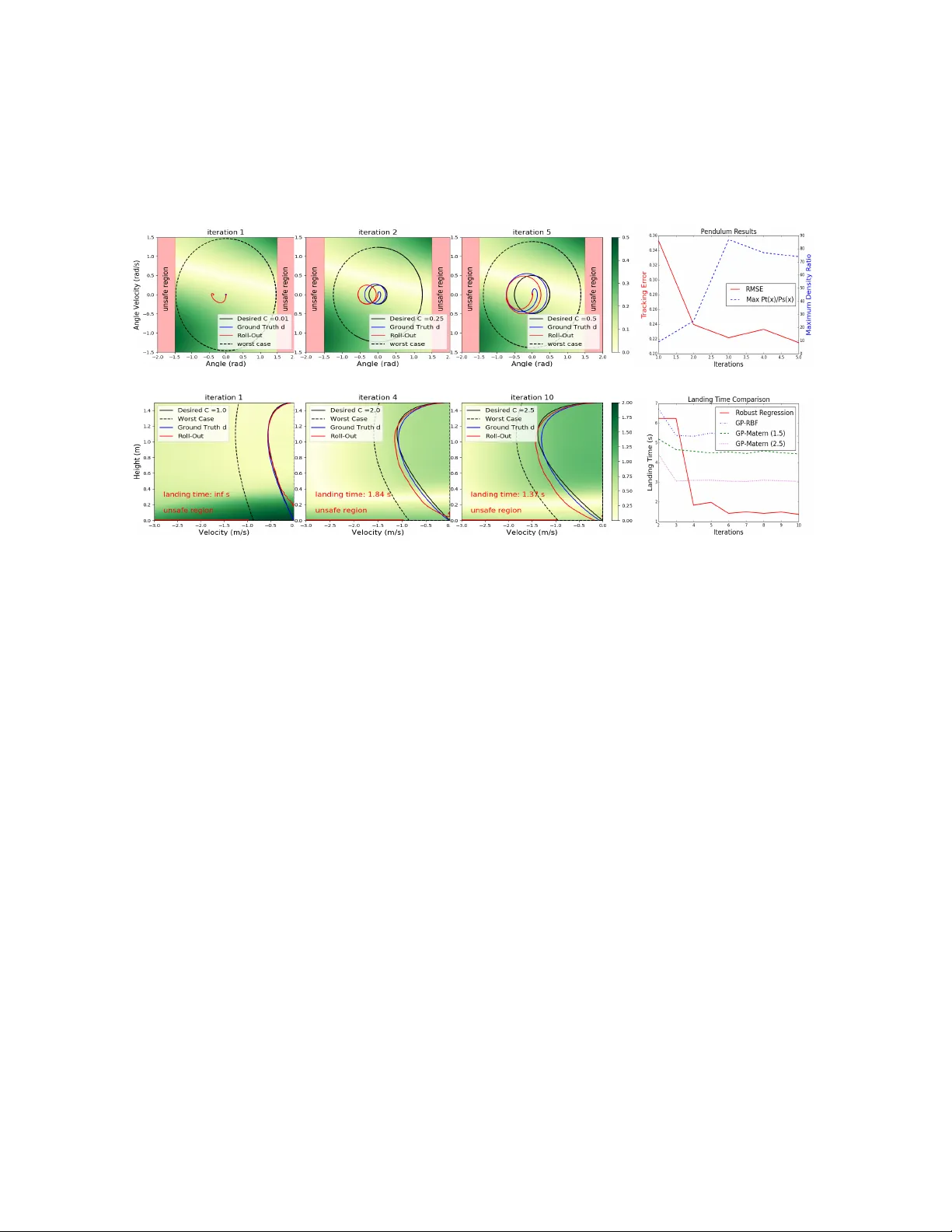
본 논문은 순차 제어 환경에서 안전하게 데이터를 수집하고, 이를 통해 고성능 제어 목표를 달성하고자 하는 “안전 탐색(safe exploration)” 문제를 다룬다. 전통적인 안전 탐색 방법은 주로 가우시안 프로세스(GP)를 이용해 모델 불확실성을 추정하고, 불확실성 상한을 기반으로 안전한 행동을 선택한다. 그러나 실제 로봇 시스템에서는 복잡한 비선형 잔차(dynamic residual)와 외란이 존재하고, GP의 커널을 적절히 설정하기 어려워 탐색 효율이 크게 저하된다. 저자들은 이러한 한계를 극복하기 위해, 공변량 이동(covariate shift)을 명시적으로 고려한 딥 강건 회귀 모델을 제안한다.
### 1. 문제 설정
제어 대상은 일반적인 로봇 동역학 모델
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기