분산형 MPC 기반 다중 로봇 목표 추적과 장애물 회피
본 논문은 동적 환경에서 다중 로봇이 목표를 협업 추적하면서 정적·동적 장애물을 안전하게 회피하도록 설계된 분산형 모델 예측 제어(MPC) 프레임워크를 제안한다. 비선형 퍼텐셜 필드 힘을 사전 계산된 외부 입력으로 변환해 제약식에 삽입함으로써 전체 최적화 문제를 이차형(convex) 형태로 유지하고, 로컬 최소점 문제를 해결하기 위한 세 가지 보완 전략을 제공한다. 시뮬레이션 결과는 제안 방법의 수렴성, 충돌 회피 보장 및 확장성을 입증한다.
저자: Rahul Tallamraju, Sujit Rajappa, Michael Black
본 논문은 동적 환경에서 다중 로봇이 목표를 협업적으로 추적하면서 정적·동적 장애물을 안전하게 회피하도록 설계된 분산형 모델 예측 제어(MPC) 기반 프레임워크를 제안한다. 연구 배경으로는 다중 로봇 목표 추적이 최근 활발히 연구되고 있으나, 장애물 회피를 동시에 만족시키는 방법은 비선형 동역학, 비볼록 제약, 중앙집중식 연산 복잡도 등의 문제로 제한되어 왔다는 점을 지적한다. 기존 방법들은 (i) 가중치 기반 MPC에 장애물 회피를 포함해 보장되지 않은 회피, (ii) 별도 퍼텐셜 필드 모듈을 사용해 서브옵티멀 경로와 로컬 최소점 문제를 야기하는 접근을 사용했다.
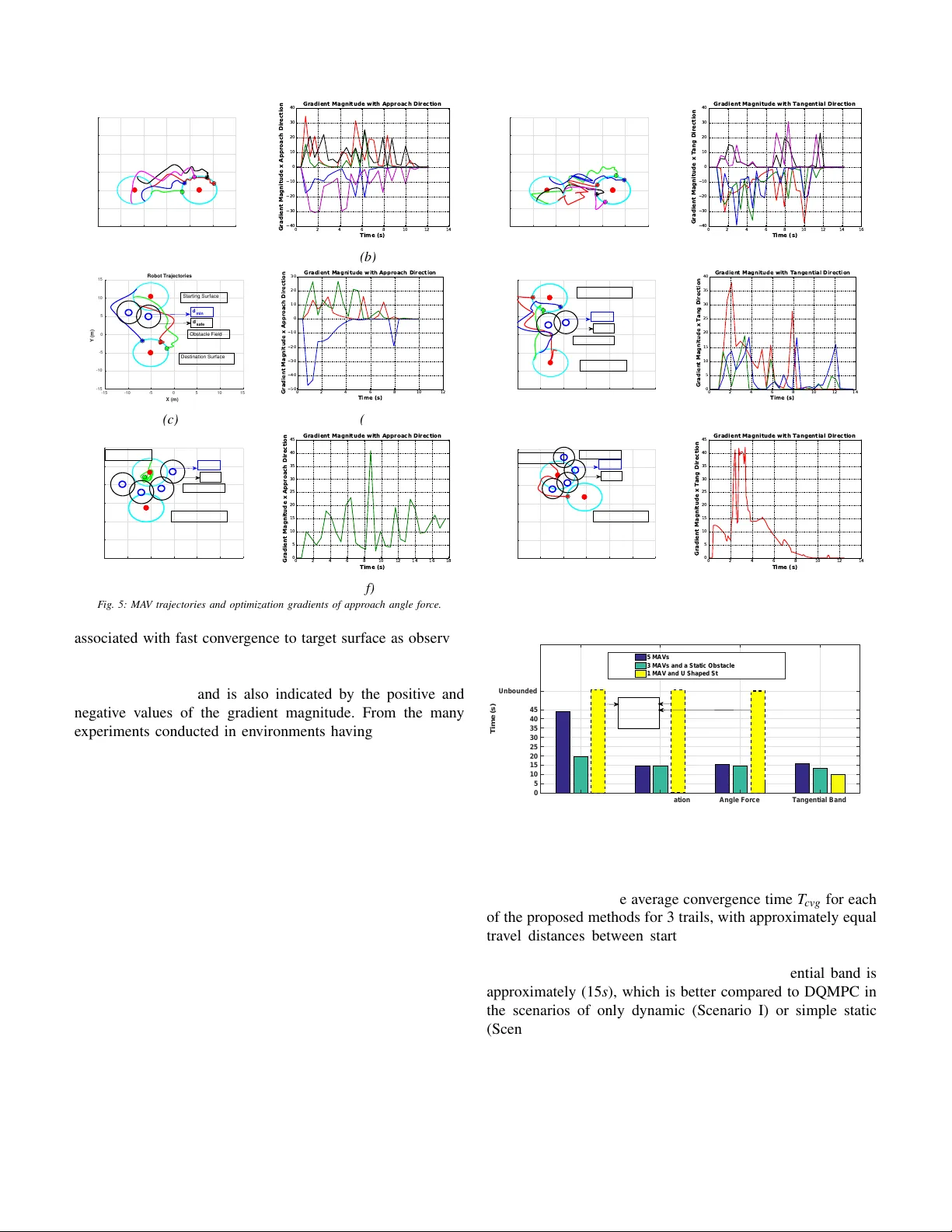
저자들은 이러한 한계를 극복하기 위해 두 가지 핵심 아이디어를 도입한다. 첫 번째는 퍼텐셜 필드에서 발생하는 반발력을 비선형 제약이 아닌 외부 입력(force) 형태로 사전 계산하여 로봇의 동역학식에 삽입함으로써 전체 최적화 문제를 이차형(convex) 형태로 유지하는 것이다. 이렇게 하면 QP(Quadratic Program) 형태의 빠른 솔버를 이용해 실시간으로 최적 제어 입력을 얻을 수 있다. 두 번째는 퍼텐셜 필드 기반 회피에서 흔히 발생하는 로컬 최소점 문제를 해결하기 위해 세 가지 보완 전략을 제시한다. (a) Swivelling Robot Destination Method는 로봇이 목표 표면에 도달하기 위해 회전 각도를 조정해 장애물 주변을 우회하도록 한다. (b) Approach Angle Method는 로봇이 목표에 접근하는 각도를 기반으로 반발력의 방향을 재조정해 회피 경로를 다이나믹하게 바꾼다. (c) Tangential Band Method는 접선 방향의 힘을 추가해 로봇이 장애물과 목표 사이의 접선 밴드 안에서 움직이게 함으로써 로컬 최소점에 빠지는 것을 방지한다.
시스템 모델은 2차원 목표 표면(예: 목표를 중심으로 한 원형) 위에 로봇이 배치되는 상황을 가정한다. 각 로봇 R_k는 위치 ξ_Rk(t)와 요(yaw) ψ_Rk(t)를 갖고, 목표 위치 x_P(t)와 장애물 위치 x_Oj(t)를 입력으로 받는다. 알고리즘 1은 각 로봇이 매 시간 단계마다 수행하는 절차를 정의한다. 1) 목표와 현재 요를 이용해 원하는 목적지 위치 \(\hat{x}_{Rk}\)를 계산한다. 2) 이웃 로봇 및 장애물의 예측 궤적을 이용해 horizon N+1 동안의 외부 반발력 f_Rk(t)(0…N)를 계산한다. 3) DQMPC를 풀어 가속도 입력 u_Rk(t)(0…N)와 예측 궤적을 얻는다. 여기서 상태 전이식은 \(x_{n+1}=A x_n + B (u_n + f_n + g)\) 형태이며, A와 B는 샘플링 시간 Δt에 기반한 선형 행렬이다. 4) 목표를 향한 요 ψ_Rk(t+1)를 계산하고, 5) 최종 예측 위치와 요를 저수준 비행 제어기에 전달한다.
목적함수 J_DQMPC는 입력 비용(가속도와 외부 힘의 제곱합)과 최종 상태 비용(목표 위치와 속도)으로 구성된다. 제약식은 입력·상태·속도 한계와 최소 거리 d_min을 포함한다. 외부 힘 f_Rk는 하이퍼볼릭 함수 형태의 퍼텐셜 필드(F_Rk,Oj_hyp(d))를 사용해 거리 d에 따라 강도가 변한다.
시뮬레이션에서는 다양한 시나리오가 설정되었다. (1) 정적 장애물만 존재하는 경우, (2) 움직이는 장애물이 목표와 로봇을 교차하는 경우, (3) 다수의 로봇이 서로 교차하면서 목표를 추적하는 경우 등이다. 모든 실험에서 제안된 방법은 충돌 없이 목표 표면에 수렴했으며, 로컬 최소점 회피 전략을 적용하지 않은 대비 실험에 비해 회피 성공률이 크게 향상되었다. 또한, 로봇 수가 증가해도 계산 시간은 선형적으로 증가해 실시간 적용이 가능함을 확인했다.
논문의 주요 기여는 다음과 같다. ① 비선형 퍼텐셜 필드 힘을 외부 입력으로 변환해 완전 이차형 MPC로 전환한 새로운 접근법. ② 로컬 최소점 문제를 해결하기 위한 세 가지 실용적인 보완 메커니즘. ③ 완전 비동기식·분산형 설계로 확장성을 확보하고, 중앙집중식 최적화의 계산 복잡도를 회피한 점. ④ 다양한 동적 환경에서의 시뮬레이션을 통해 충돌 보장, 수렴성, 실시간성을 입증한 실증적 결과. 향후 연구에서는 실제 UAV 플랫폼에 적용해 실험적 검증을 수행하고, 센서 노이즈와 통신 지연을 고려한 견고한 구현을 목표로 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기