연속 변형 기반 다중 로봇 협동의 형식적 안전·활동성 규격화
본 논문은 리더‑팔로워 구조의 연속 변형(continuum deformation) 방식을 이용해 다중 무인 항공기(MAS)를 제어하고, 이를 선형시대 논리(LTL)로 형식화한다. 안전 요구사항을(편차 제한, 팔로워 포함, 충돌 회피, 작업 공간 및 장애물 회피) 수학적 부등식과 정리로 제시하고, 최종 목표 형상 도달을 위한 liveness 조건을 정의한다. 2‑D 시뮬레이션을 통해 제시된 정리와 LTL 사양이 실제 로봇 군집에 적용 가능함을 검…
저자: Hossein Rastgoftar, Jean-Baptiste Jeannin, Ella Atkins
본 논문은 리더‑팔로워 구조를 갖는 다중 무인 항공기(MAS)의 협동 비행을 연속 변형(continuum deformation)이라는 연속적인 동형 변환 프레임워크로 모델링하고, 이를 선형시대 논리(LTL)를 이용해 형식적으로 규격화한다.
1. **배경 및 문제 정의**
- 기존 컨테인먼트 제어는 리더가 정의한 다각형(또는 다면체) 내부에 팔로워를 수렴시키지만, 전이 과정에서 팔로워가 경계 밖으로 나가거나 충돌이 발생할 위험이 있다.
- 연속 변형은 리더가 정의하는 d‑차원 단순체(예: 2‑D 삼각형, 3‑D 사면체)를 기준으로 전체 군집을 동형 변환(Q, d)으로 매핑함으로써, 변형 과정에서도 팔로워 간 거리 변화와 경계 포함을 보장한다.
2. **수학적 모델**
- 각 에이전트 i의 실제 위치 r_i(t)와 목표 위치 r̂_i(t) 사이에 동형 변환 r̂_i(t)=Q(t,t₀) r_i⁰+d(t,t₀) 를 정의한다. Q는 Jacobian 행렬, d는 강체 변위 벡터이며, Q(t₀,t₀)=I, d(t₀,t₀)=0이다.
- 리더 집합 V_L={1,…,d+1}는 언제나 선형 독립을 유지해 Λ(r̂₁,…,r̂_{d+1})=d 를 만족한다.
- 팔로워 i는 d+1개의 인-이웃 N_i와 가중치 w_{i,k}를 통해 (7)식에 의해 초기 단순체와 동일한 바리센트리크 좌표를 유지한다.
3. **LTL 기반 안전·활동성 사양**
- **안전 요구사항** ψ₁~ψ₅를 LTL 공식으로 표현한다.
- ψ₁: ‖r_i−r̂_i‖≤δ (편차 제한) → □∀i ‖·‖≤δ.
- ψ₂: 팔로워가 리더가 만든 단순체 내부에 존재 → □∀i∈V_F Ω(r̂₁,…,r̂_{d+1},r_i)≥0.
- ψ₃: 에이전트 간 최소 거리 보장 → □∀i≠j ‖r_i−r_j‖≥2ρ.
- ψ₄: 모든 에이전트가 작업 공간 B 안에 머무름 → □∀i ∧_{k=1}^{m_B} Ω(b_{k,1},…,b_{k,d+1},r_i)≥0.
- ψ₅: 장애물 O와의 충돌 회피 → □∀i ¬∧_{k=1}^{m_O} Ω(o_{k,1},…,o_{k,d+1},r_i)≥0.
- **활동성 요구사항** ψ₆: 최종 목표 형상 도달 → ◇∀i ‖r_i−r_f_i‖≤ε.
4. **안전성 보장을 위한 정리**
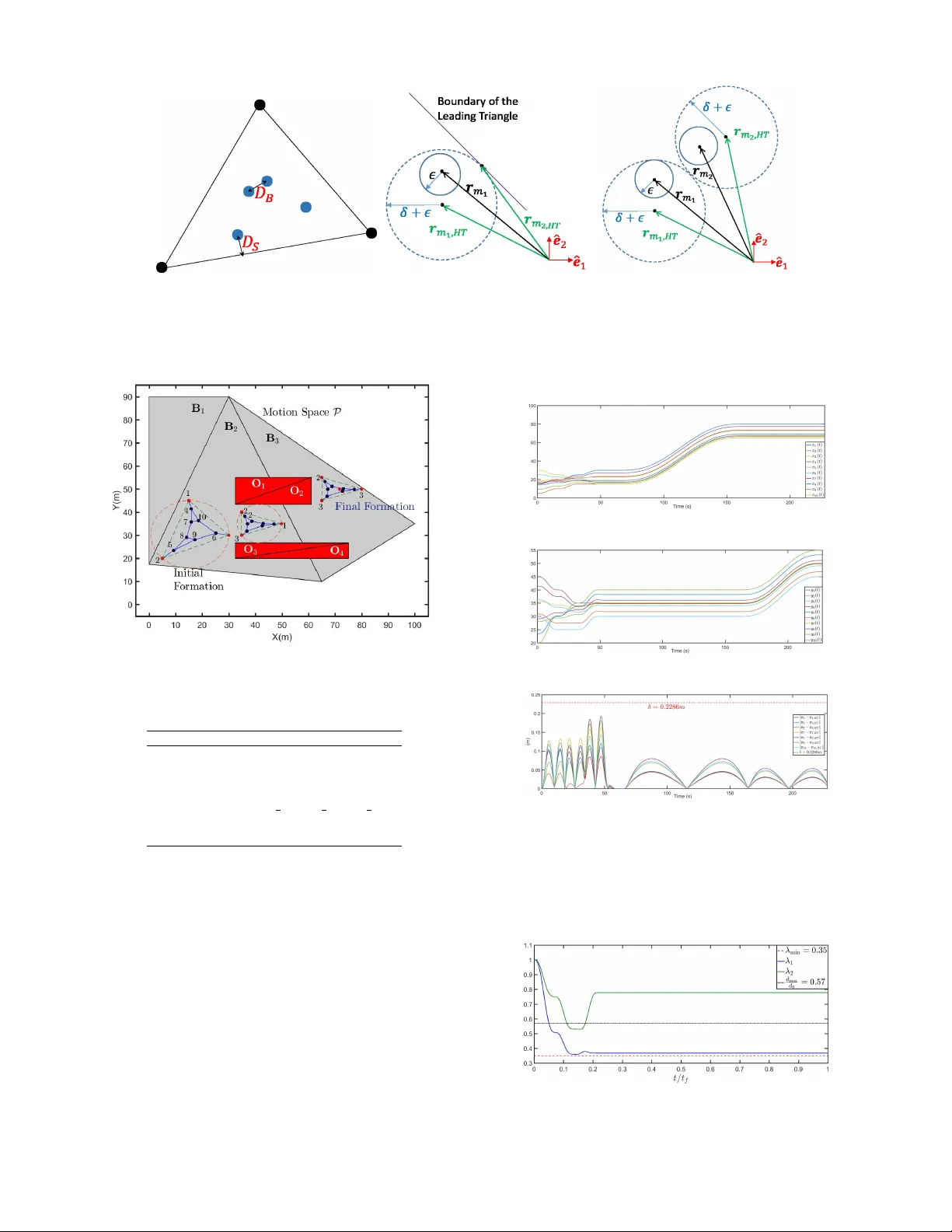
- **Theorem 1**: 초기 최소 에이전트 간 거리 DB와 리더 경계와 팔로워 간 최소 거리 DS를 이용해 δ_max = min{½(DB−2ρ), DS−ρ}와 λ_min = (δ+ρ)/(δ_max+ρ) 를 정의한다. 변형 행렬 UD=½(QᵀQ)의 고유값 λ_i(t) 가 λ_min ≤ λ_i(t) ≤ 1/λ_min 를 만족하면 ψ₂·ψ₃가 자동으로 보장된다. 이는 변형이 과도하게 압축·팽창되지 않음을 보장한다.
- **Theorem 2**: ψ₂와 리더가 작업 공간 B 안에 머무르는 ψ₇(□∀i∈V_L Ω(b_{k,1},…,b_{k,d+1},r_i)≥0) 가 동시에 만족되면 전체 ψ₄(작업 공간 포함)가 보장된다.
- **Theorem 3**: ψ₂와 리더가 장애물 O와 충돌하지 않는 ψ₈(□∀i∈V_L ¬Ω(o_{k,1},…,o_{k,d+1},r_i)≥0) 가 동시에 만족되면 전체 ψ₅(장애물 회피)가 보장된다.
5. **시뮬레이션 검증**
- 2‑D 환경(d=2)에서 N=10 에이전트를 사용, 리더 1‑3이 이동 경로를 정의하고 팔로워 4‑10이 로컬 통신 그래프(그림 4)와 가중치(표 I)로 제어된다.
- 작업 공간 B는 세 개의 삼각형 B₁∪B₂∪B₃ 로 구성되고, 장애물 O는 네 개의 삼각형 O₁…O₄ 로 배치된다.
- 시뮬레이션 결과: ψ₁(편차)은 δ=0.2286 m 이하로 유지, ψ₂·ψ₃는 초기 DB=2.7348 m, DS=1.5996 m 로부터 계산된 λ_min을 만족하여 충돌 및 경계 이탈이 없었다. ψ₄·ψ₅는 리더가 B와 O를 벗어나지 않음으로 자동 보장되었으며, 최종 시간 t_f=227.5 s에 모든 에이전트가 목표 위치 r_f_i에 ε=0.05 m 이내로 도달해 ψ₆도 만족하였다.
6. **의의 및 향후 연구**
- 연속 변형 기반 접근은 리더 위치만 조정하면 전체 군집이 자동으로 변형되므로 통신 부하와 계산 복잡도가 크게 감소한다.
- LTL 사양은 모델 검증 도구와 연동해 설계 단계에서 형식 검증을 수행할 수 있어, 안전이 필수적인 군집 비행(예: 군사, 재난 구호)에서 실용적이다.
- 향후 연구는 3‑D 환경에서의 실험, 동적 장애물 및 비정상 통신 손실에 대한 강인성 분석, 그리고 실시간 LTL 모니터링을 통한 온라인 안전 보증을 목표로 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기