분산 센서 네트워크를 위한 입자 PHD 필터 기반 다중 목표 추적
본 논문은 랜덤 유한 집합(RFS) 이론에 기반한 입자 PHD 필터를 활용하여, 데이터 연관 문제를 회피하면서 분산 센서 네트워크에서 다중 목표를 추적하는 두 가지 알고리즘을 제안한다. 하나는 이웃 간 확산 통신을 이용한 Diffusion Particle PHD Filter(D‑PPHDF)이고, 다른 하나는 중앙집중형 Multi‑Sensor Particle PHD Filter(MS‑PPHDF)이다. 제안 방법들의 성능을 OSPA 지표와 분산형 …
저자: Mark R. Leonard, Abdelhak M. Zoubir
본 논문은 다중 목표 추적(MTT)을 위한 새로운 분산 알고리즘을 제안한다. 서론에서는 MTT가 군사·민간 감시, 교통 관리 등 다양한 분야에서 핵심 역할을 수행하고 있음을 강조하고, 기존의 칼만 필터·입자 필터 기반 방법들은 데이터 연관 문제 때문에 분산 환경에 바로 적용하기 어렵다는 점을 지적한다. 이를 해결하기 위해 랜덤 유한 집합(RFS) 이론에 기반한 확률 가설 밀도(PHD) 필터를 도입한다. PHD 필터는 목표 수와 상태를 동시에 추정함으로써 데이터 연관을 회피한다는 장점이 있다.
이론적 배경으로는 선형 2차원 상태‑측정 모델을 사용한다. 상태는 위치와 속도로 구성되며, 표준 선형 가우시안 전이와 측정 방정식을 따른다. 측정은 센서의 시야 내에 있는 목표에 대해 위치 추정값을 제공하며, 클러터는 포아송 과정으로 모델링한다. RFS는 목표 집합과 측정 집합을 각각 무한히 가능한 개수와 값으로 표현한다. PHD는 RFS의 1차 모멘트이며, 목표 수는 PHD의 적분값으로 얻어진다. PHD 필터의 예측·업데이트 방정식은 생존·탄생, 검출 확률, 측정 가능도 등을 포함한다.
분산 MTT를 위해 두 가지 알고리즘을 설계한다. 첫 번째는 Diffusion Particle PHD Filter(D‑PPHDF)이며, 각 노드가 자체 입자 PHD 필터를 실행하고 인접 노드와 두 단계(측정 교환 → 상태 교환)로 정보를 확산한다. 이때 사용되는 통신 스키마는 Diffusion Adaptation에서 영감을 얻었으며, 각 노드는 자신의 측정과 이웃의 추정값을 결합해 가중치를 업데이트한다. 두 번째는 Multi‑Sensor Particle PHD Filter(MS‑PPHDF)로, 모든 노드의 측정을 중앙 노드로 전송하고, 중앙에서 단일 다중 센서 PHD 필터를 수행한다. 중앙집중형이므로 전역적인 정보 활용이 가능하지만 통신 부하가 크게 증가한다.
두 알고리즘 모두 Adaptive Target Birth(ATB) 기법을 적용한다. 기존 PHD 필터는 사전에 정의된 출생 밀도 b_i(s) 를 사용하지만, ATB는 측정값 중 기존 입자 가중치에 큰 영향을 주지 않는 경우에만 새로운 입자 집합을 생성한다. 이렇게 하면 불필요한 입자 수를 줄이고, 초기 목표 탐지 지연을 최소화한다. ATB는 각 타임스텝의 마지막에 수행되며, 새 입자는 다음 스텝에서 지속 입자로 전환된다.
알고리즘 복잡도 분석에서는 입자 수 Nₚ와 인접 노드 수 |𝒩ₖ|를 기준으로 D‑PPHDF의 연산량은 O(Nₚ·|𝒩ₖ|)이며, 통신량도 |𝒩ₖ|에 비례한다. 반면 MS‑PPHDF는 중앙에서 O(N·Nₚ) 연산과 전체 노드로부터 N·Nₚ 크기의 데이터를 수집해야 하므로 통신 비용이 크게 증가한다.
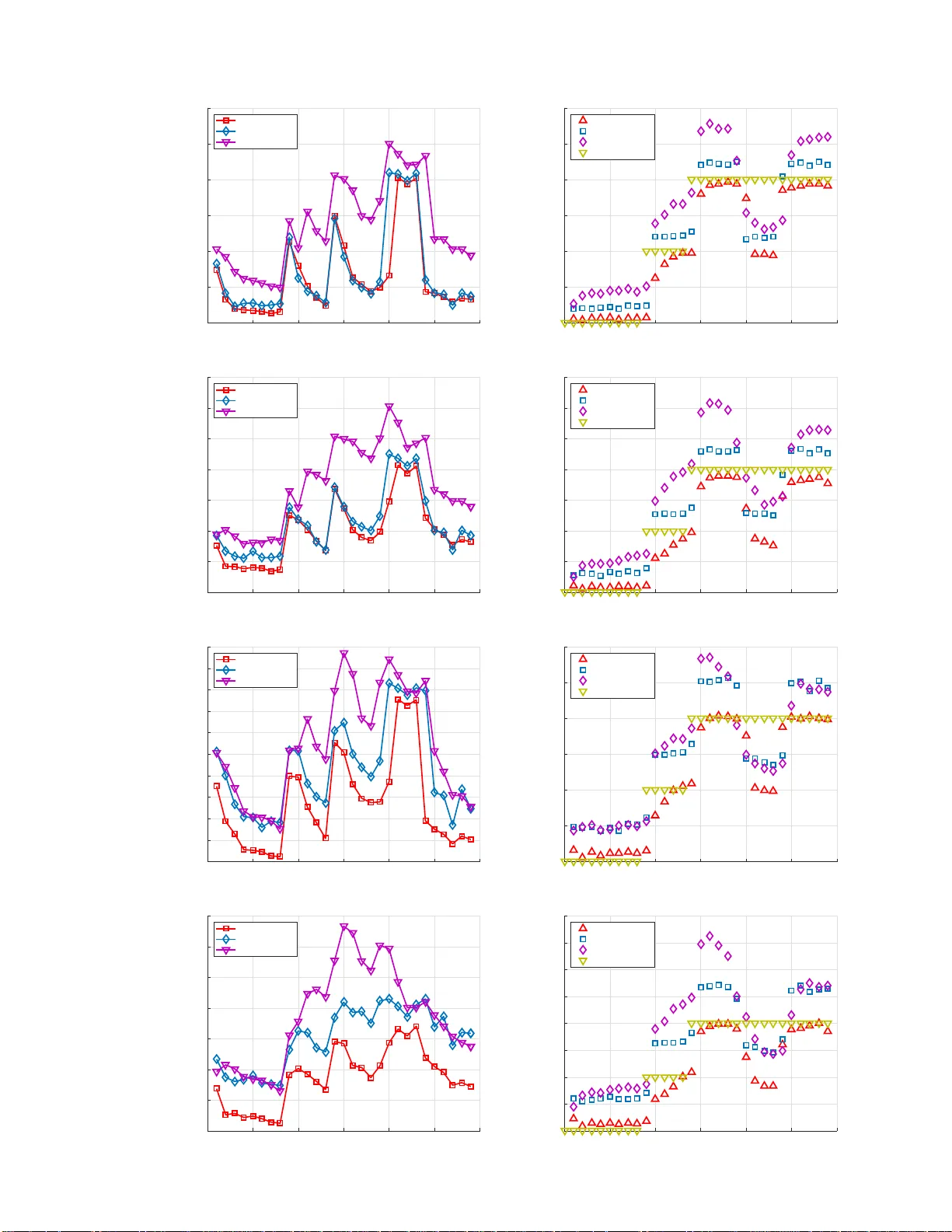
성능 평가는 Optimal Subpattern Assignment(OSPA) 거리와 분산형 Posterior Cramér‑Rao Lower Bound(DPCRLB)를 사용한다. 시뮬레이션 설정은 1‑coverage(시야 겹침 최소) 네트워크, 목표 수가 변동하는 시나리오, 클러터 파라미터 λ_FA와 외란 수준을 다양하게 조절한 경우를 포함한다. 결과는 다음과 같다. (1) D‑PPHDF는 MS‑PPHDF와 거의 동일한 OSPA 오차를 보이며, 특히 통신 제한이 있는 환경에서 유리하다. (2) ATB 적용 시 초기 목표 탐지 지연이 크게 감소하고, 불필요한 입자 생성이 억제되어 연산 효율이 향상된다. (3) 클러터가 증가해도 두 알고리즘 모두 OSPA 오차 상승이 완만하며, DPCRLB와 비교했을 때 실제 성능이 이론적 한계에 근접함을 확인한다. (4) 외란(가우시안이 아닌 잡음)에도 강인성을 유지한다.
결론에서는 D‑PPHDF와 MS‑PPHDF가 각각 분산 및 중앙집중형 환경에서 효과적으로 다중 목표를 추적할 수 있음을 강조한다. 특히 D‑PPHDF는 네트워크 자체가 판단·추정 주체가 되므로, 중앙 관리자가 없는 상황에서도 실시간 감시가 가능하다. 향후 연구 방향으로는 이동형 센서 노드, 비선형·비가우시안 동역학, 다중 센서 전체 PHD(다중 센서 PHD)와의 통합, 그리고 하드웨어 구현 및 실험 검증을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기