밀리미터파 기반 도시 환경 고정밀 위치추정
본 논문은 5G mmWave 네트워크에서 다중 기지국(FE)으로부터 획득한 TOA, AOA, AOD 정보를 활용해 UE와 주변 스캐터러의 위치를 동시에 추정하는 두 단계 방식과, 다중 국소 최적점을 효과적으로 탐색하는 Gradient‑Assisted Particle Filter(GAPF) 알고리즘을 제안한다. 시뮬레이션 결과는 GAPF가 Cramer‑Rao Bound에 근접함을 보이며, 라디오 환경 매핑(REM)과 빔의 방향성을 높이는 것이 위…
저자: Macey Ruble, Dr. Ismail Guvenc
본 논문은 5G 시대에 핵심 기술로 부상하고 있는 mmWave 대역을 활용한 고정밀 위치추정 방법을 제안한다. 서론에서는 mmWave가 제공하는 초고대역폭과 대규모 안테나 어레이가 다중 경로를 시간·각도 영역에서 명확히 구분할 수 있게 함으로써, 기존 마이크로파 기반 위치추정보다 월등한 성능을 기대할 수 있음을 강조한다. 특히 도심 환경에서는 GPS 신호가 차단되는 경우가 많아 네트워크 자체가 위치 정보를 제공해야 하는 필요성이 대두된다.
문헌 리뷰에서는 기존 연구들이 주로 RSS, TOA, AOA를 개별 혹은 조합하여 LOS 기반으로만 위치를 추정했으며, NLOS 경로는 간섭으로 취급하거나 무시하는 한계를 지적한다. 반면 mmWave는 경로가 극히 적고 각 경로가 강하게 구분되므로, 단일 반사 NLOS 경로조차도 유용한 측정 정보가 될 수 있다.
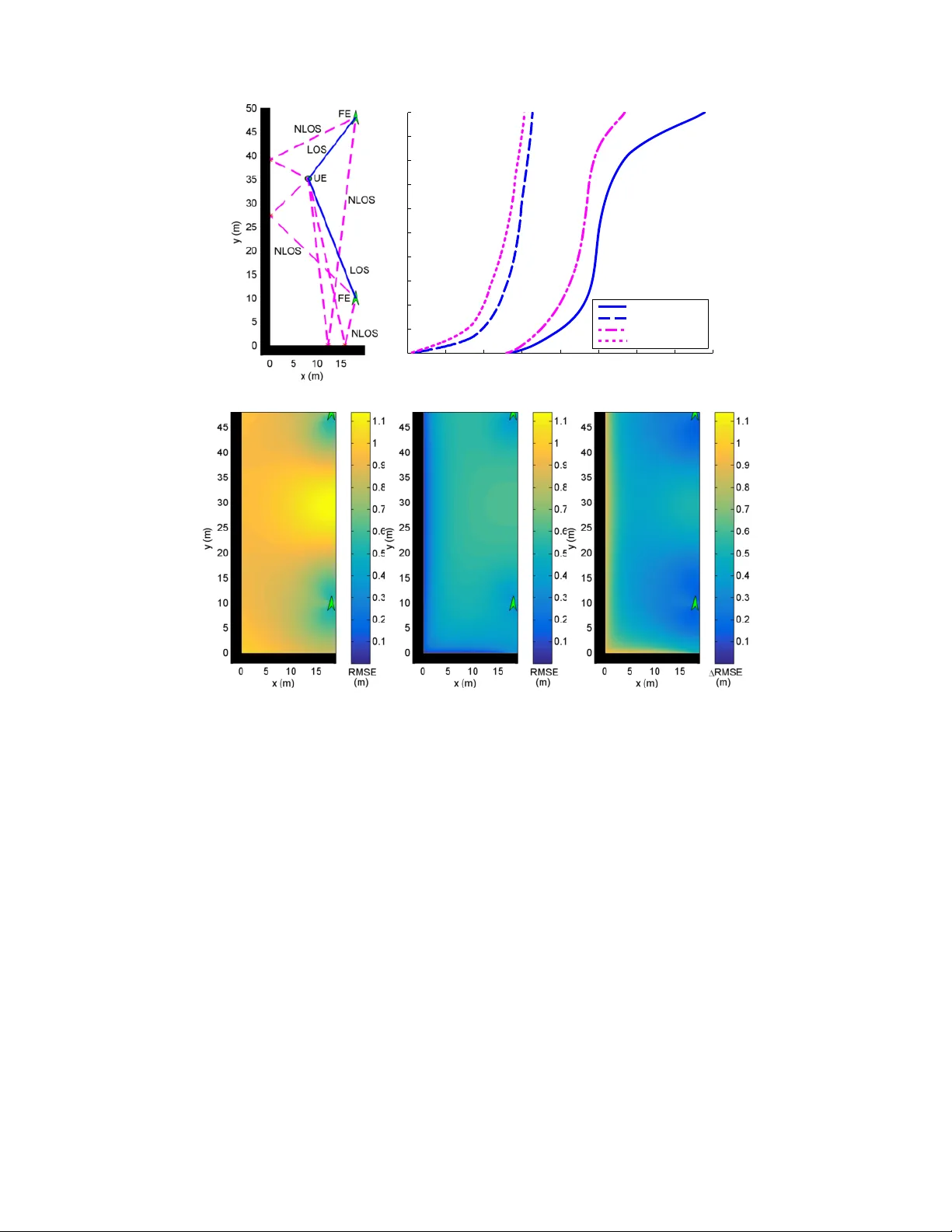
제안된 방법은 두 단계로 구성된다. 1단계에서는 초기 접속 또는 빔 트레이닝 과정에서 각 FE(기지국)와 UE(사용자 장비) 사이의 강한 빔을 선택하고, 해당 빔의 중심 방향을 AOD로, UE 배열에서 측정된 AOA와 초고대역폭을 이용한 TOA를 추정한다. 이때 얻어지는 파라미터는 정확도가 완벽하지 않으며, 특히 NLOS 경로에서는 스캐터러 위치가 미지이다. 2단계에서는 이러한 파라미터들을 입력으로 하여 UE와 스캐터러의 좌표를 동시에 추정한다. 핵심 알고리즘인 Gradient‑Assisted Particle Filter(GAPF)는 파티클 필터의 전역 탐색 능력과 그라디언트 기반 로컬 최적화를 결합한다. 파티클은 초기에는 넓은 탐색 영역에 분포하고, 각 반복에서 측정 파라미터와 현재 추정값 사이의 잔차를 이용해 그라디언트를 계산, 파티클을 고정밀 지역으로 이동시킨다. 이후 가중치가 높은 파티클을 중심으로 재샘플링을 수행해 탐색 효율을 유지한다. 이 과정은 다중 국소 최적점이 존재하는 비선형 비용 함수에서도 전역 최적점에 수렴하도록 설계되었다.
시스템 모델에서는 2차원 평면을 가정하고, LOS와 단일 반사 NLOS 경로를 각각 수식(4)~(9)로 표현한다. 측정 노이즈는 경로 종류에 따라 서로 다른 가우시안 분산을 갖는다고 가정하고, 이를 기반으로 최대우도 추정식을 도출한다. 또한, Cramer‑Rao Bound(CRB)를 정확히 유도하여 이론적 성능 한계를 제시한다.
시뮬레이션에서는 도시 캐니언과 도시 코너 두 가지 시나리오를 설정하고, 하나 또는 두 개의 FE가 UE와 연결되는 경우를 고려한다. 파라미터 노이즈 수준, 빔 폭, NLOS 경로 수 등에 따라 위치 오차를 평가한다. 결과는 GAPF가 CRB에 거의 근접한 성능을 보이며, 특히 빔 방향성이 좁을수록(높은 안테나 이득) AOA·AOD 측정 정확도가 향상되어 전체 오차가 크게 감소함을 보여준다. 또한, REM을 활용한 경우와 그렇지 않은 경우를 비교했을 때, 완벽한 REM(스캐터러 위치가 정확히 알려진 경우)에서는 NLOS 경로를 효과적으로 보정해 평균 위치 오차가 약 30% 이상 감소한다. 현실적인 REM은 추정 오차가 존재하지만, 시뮬레이션을 통해 REM 정확도가 일정 수준 이상이면 여전히 유의미한 성능 향상이 가능함을 확인한다.
마지막으로, GAPF를 이용해 추정된 스캐터러 위치를 기반으로 라디오 환경 매핑(Radio‑Environmental Mapping)을 수행한다. 매핑된 환경 정보는 향후 초기 접속 단계에서 빔 선택을 최적화하거나, 네트워크 차원에서 자원 할당을 효율화하는 데 활용될 수 있다. 결론에서는 제안된 두 단계 접근법이 다중 FE와 NLOS 경로를 동시에 활용함으로써, 기존 LOS‑전용 방법에 비해 높은 정확도와 견고성을 제공한다는 점을 강조하고, 향후 3차원 확장, 비가우시안 노이즈 모델링, 실험적 검증 등을 연구 과제로 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기