계층형 무선 센서 네트워크를 활용한 물 품질 모니터링을 위한 다중 센서 데이터 융합
본 논문은 물 품질 감시를 위해 계층형 무선 센서 네트워크(WSN)를 구성하고, 각 클러스터의 로컬 융합 센터(LFC)에서 하드·소프트 MAP 기반 의사결정 규칙을 적용한다. 비용 가중치를 도입한 수정 MAP는 오탐보다 누락 탐지의 위험을 크게 반영하여 기존 OR, AND, n‑out‑of‑M 및 ML 기법보다 낮은 총 비용을 달성한다. 시뮬레이션 결과, 센서 수와 오염 수준이 증가할수록 제안 방법의 성능 우위가 확대된다.
저자: Ebrahim Karami, Francis M. Bui, Ha H. Nguyen
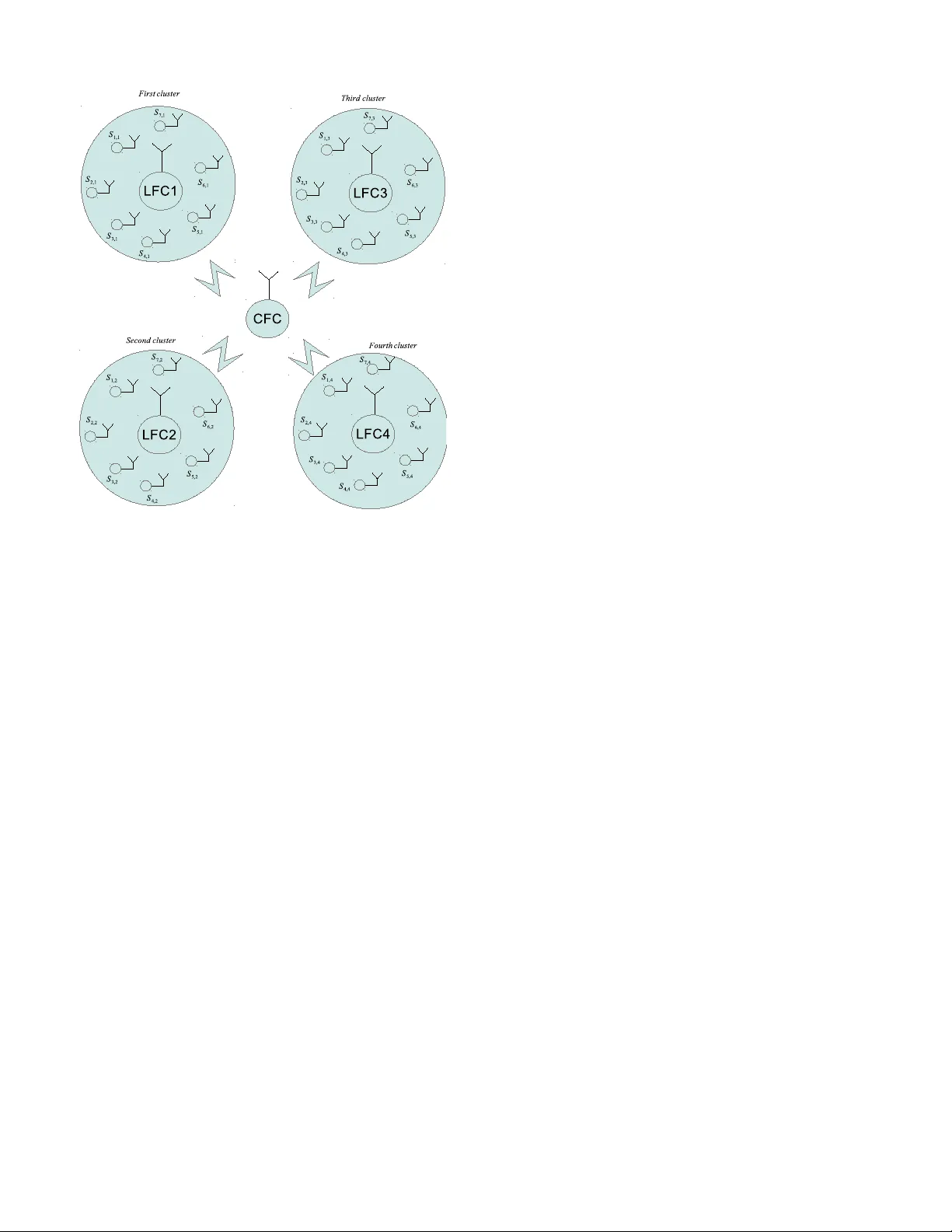
본 논문은 물 품질 감시를 위한 계층형 무선 센서 네트워크(WSN) 구조와 그 안에서 수행되는 데이터 융합 기법을 체계적으로 제시한다. 먼저 서론에서는 물 공급 안전성 확보를 위한 물 오염 경보 시스템(WCWS)의 필요성을 강조하고, 기존 센서 단독 사용 시 발생하는 측정 오차와 무선 전송 오류를 극복하기 위해 협업 기반 분산 파라미터 추정(DPE)과 계층형 클러스터링이 유리함을 설명한다. 클러스터는 물리적 파라미터 θ가 거의 일정한 영역으로 정의되며, 각 클러스터는 로컬 융합 센터(LFC)를 통해 이진 결정을 수집하고, 필요 시 중앙 융합 센터(CFC)로 전달한다.
시스템 모델에서는 M개의 활성 센서가 동일한 파라미터 θ를 측정하고, 측정값 \(\hat\theta_m = \alpha_m \theta + e_m\) 로 표현한다. 센서는 임계값 τ_min, τ_max을 기준으로 이진 신호 x_m을 생성하고, 평탄 레일리 페이딩 채널 h_m과 복소 가우시안 잡음 n_m을 거쳐 LFC에 도착한다. LFC는 두 가지 형태의 융합을 고려한다. 첫 번째는 연속 수신 신호 r_m을 직접 이용하는 소프트 융합(SD‑MAP), 두 번째는 이미 이진화된 ˆx_m을 이용하는 하드 융합(HD‑MAP)이다.
SD‑MAP는 베이즈 정리를 이용해 사후 확률 \(P(x|r_1,\dots,r_M)\) 를 최대화한다. 각 센서의 조건부 확률 \(P(r_m|x)\) 은 BPSK 전송 모델과 센서의 오탐·누락 확률(P_m^F, P_m^M) 및 채널 비트 오류(P_m^b)를 포함해 식(15)–(16) 로 전개된다. 우도비 ζ_SD가 1을 초과하면 오염으로 판단한다.
HD‑MAP는 센서가 전송한 이진 결정을 기반으로, 수정된 오탐·누락 확률(˜P_m^F, ˜P_m^M)을 사용해 사후 확률을 계산한다. 여기서 각 센서에 부여되는 가중치 β_m와 α_m은 센서 정확도와 채널 품질에 따라 달라지며, 식(21)‑(23) 에서 전체 우도비 ζ_HD가 도출된다. 동일 품질 센서 집합에서는 ζ_HD가 가중된 n‑out‑of‑M 규칙과 동일함을 증명한다.
전통적인 MAP는 오탐과 누락 탐지의 비용을 동일하게 취급한다는 한계가 있다. 물 품질 감시에서는 누락 탐지(오염 미탐지)의 사회·경제적 비용이 훨씬 크다. 이를 반영하기 위해 논문은 비용 가중 MAP을 도입한다. 총 비용 함수 \(\bar C\) (식 24) 에서 각 가설에 대한 비용 C_ij 를 정의하고, 비용 비율에 따라 우도비를 수정한다(식 25). 이 수정은 SD‑MAP와 HD‑MAP 모두에 적용 가능하며, 비용 민감도에 따라 최적 임계값을 자동 조정한다.
시뮬레이션에서는 pH 파라미터를 평균 7, 표준편차 σ 로 가정한 Gaussian 분포와 센서 오차를 ±δ 로 제한한 균등 분포를 사용한다. 임계값 τ_min=6.5, τ_max=8.5 로 설정해 안전 구간을 정의하고, 오염 수준을 σ 혹은 δ 변화로 모델링한다. 비용 파라미터는 C_10=1, C_01=10 로 설정해 누락 탐지 비용을 10배 높게 설정하였다.
시뮬레이션 결과는 다음과 같다.
- 수정된 HD‑MAP와 SD‑MAP는 기존 OR, AND, n‑out‑of‑M, 그리고 ML 융합에 비해 총 비용이 크게 감소하였다.
- 센서 수 M이 증가하거나 오염 레벨(분산)이 커질수록 제안 방법의 비용 절감 효과가 더욱 두드러졌다.
- 하드 MAP은 구현 복잡도가 낮음에도 불구하고 소프트 MAP과 비슷한 비용 절감률을 보였으며, 실시간 시스템에 적합하다.
- 비용 가중 파라미터를 조정함으로써 시스템 설계자는 오탐을 허용하면서도 누락 탐지 위험을 최소화하는 맞춤형 융합 정책을 손쉽게 구현할 수 있다.
결론적으로, 본 연구는 물 품질 모니터링이라는 특수한 응용 분야에서 센서 이질성, 채널 불확실성, 그리고 위험 비용 비대칭성을 모두 고려한 데이터 융합 프레임워크를 제시한다. 제안된 비용 가중 MAP은 기존의 단순 논리 규칙이나 확률적 최적화 기법보다 실용적인 성능을 제공하며, 향후 2단계 감시 체계의 두 번째 단계(정밀 파라미터 전송)와 연계된 전체 시스템 설계에도 확장 가능할 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기