UAV 기반 실시간 미세 입자 공기질 지도 구축
본 논문은 무인항공기(UAV)에 탑재된 고정밀 공기질 센서를 이용해 2 m 단위의 초고해상도 AQI 지도를 실시간으로 생성하는 시스템 ARMS와, 물리 기반 가우시안 플룸 모델을 신경망에 결합한 GPM‑NN 예측 모델, 그리고 배터리 효율을 극대화하는 적응형 측정 알고리즘을 제안한다. 실험은 도심 공원(2D)과 건물 안뜰(3D) 두 시나리오에서 수행돼 기존 모델 대비 예측 정확도가 크게 향상되고 에너지 소모가 현저히 감소함을 입증한다.
저자: Yuzhe Yang, Zijie Zheng, Kaigui Bian
본 논문은 급격히 악화되는 대기오염 문제에 대응하기 위해, 미세 입자 농도를 실시간으로 고해상도(AQI) 지도화할 수 있는 UAV 기반 모바일 센싱 시스템 ARMS와 이를 지원하는 예측 모델 및 알고리즘을 종합적으로 제시한다.
1. **연구 배경 및 필요성**
기존 정적 관측소는 설치 비용과 공간적 한계로 인해 도시 전체를 커버하기 어렵고, 측정 주기가 2시간 이상으로 실시간성에 부족하다. 모바일 센서(휴대폰, 차량, 풍선 등)는 공간 해상도를 개선했지만, 여전히 수백 미터 간격으로 측정이 이루어져 미세 규모(수 미터 수준)의 AQI 변동을 포착하지 못한다. 특히 건물 내부·캠퍼스와 같은 3차원(3D) 환경에서는 수직 방향의 농도 차이가 중요하지만, 기존 연구는 2차원(2D) 지도에 국한돼 있다.
2. **시스템 ARMS 설계**
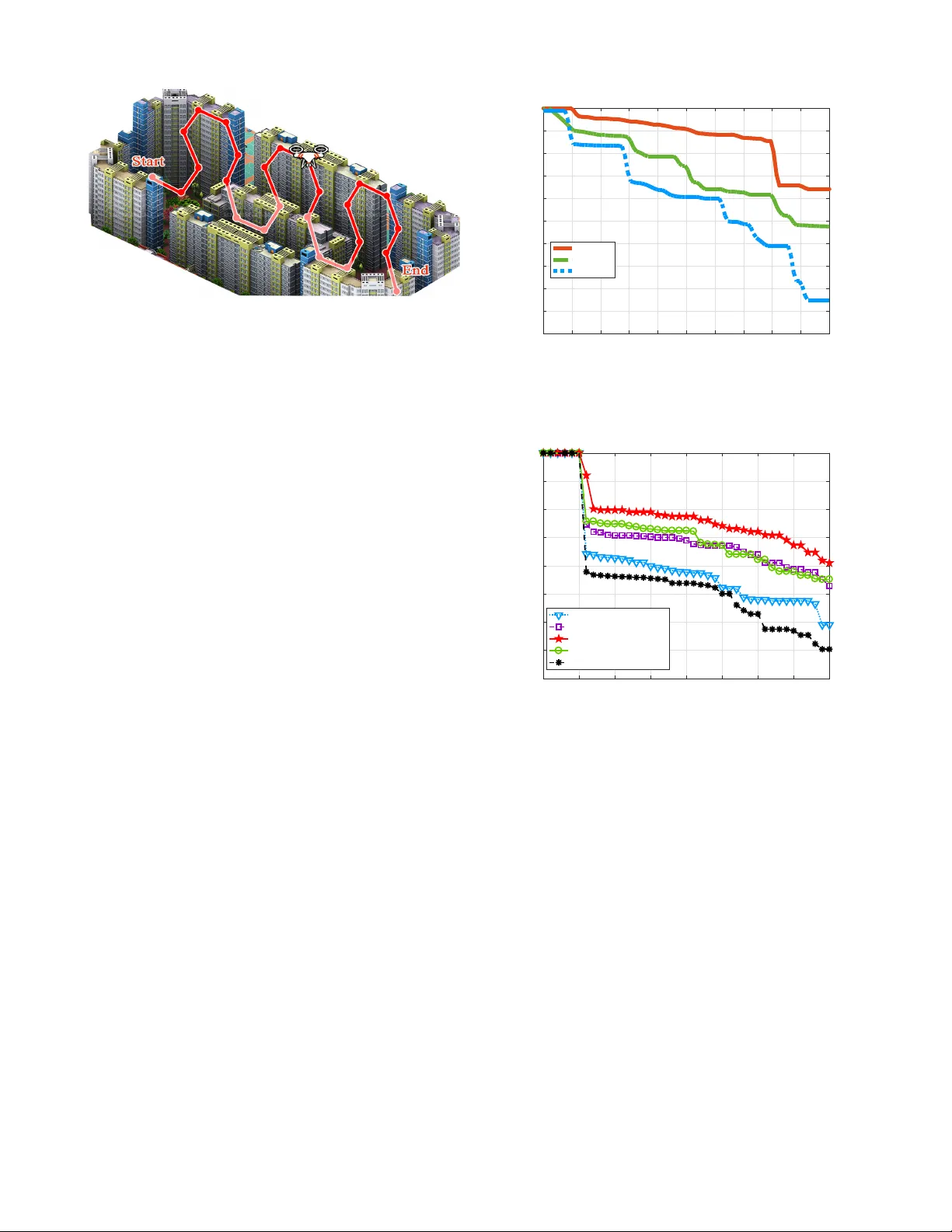
- **플랫폼**: DJI Phantom 3 쿼드콥터에 레이저 기반 다중오염물질 센서(PM2.5, PM10, CO, NO, SO2, O3)와 GPS를 장착. 배터리 지속시간은 최대 15분이며, 각 측정 지점에서 10 s 호버링 후 데이터 전송.
- **데이터 수집**: 2017년 2월~7월 동안 100일 이상, 도심 도로공원(2D)과 대학 건물 안뜰(3D)에서 5 m 격자 간격으로 측정. 각 샘플은 (x, y, z, AQI) 형태이며, 2D 경우 z=0, 3D 경우 5 m 간격으로 높이 축을 샘플링.
- **데이터 신뢰성**: 수집된 AQI와 베이징 관측소(하이디안) 데이터 간 두 표본 t‑검정 수행, p=0.9999(α=0.05)로 차이가 없음을 확인, 따라서 모바일 측정의 정확성을 입증.
3. **모델링 접근**
- **물리적 확산 모델**: 가우시안 플룸 모델(GPM)을 기반으로 입자 농도 C(x,y,z)를 풍속(u), 출처 높이(H), 확산 파라미터(σy, σz) 등으로 표현. 미세 규모에서는 온도·습도 영향이 미미하므로 모델에서 제외하고, 풍향·위치가 주요 변수임을 사전 회귀 분석으로 확인.
- **신경망 보강**: 다층 퍼셉트론(MLP) 구조를 도입해 비선형성을 학습. 입력은 위치 좌표와 GPM에서 도출된 선형 예측값, 은닉층 뉴런 수 K는 실험적으로 결정. 출력은 GPM‑NN이 결합된 최종 AQI 추정값 t(~x,u)이며, 평균값(C_static)과 결합해 최종 예측 C_f(~x,u)=C_static+t(~x,u) 형태로 표현.
- **파라미터 추정**: 전체 (K+3)개의 파라미터(은닉 가중치 W_i, 편향 b_i, 출력 가중치 β_i, 물리 모델 파라미터 H 등)를 최소제곱법과 정규화 기법으로 학습, 과적합 방지를 위해 교차 검증 및 L2 정규화 적용.
4. **적응형 측정 알고리즘**
- **목표**: 제한된 배터리와 비행 시간 내에 전체 공간을 효율적으로 커버하면서, 예측 정확도를 유지하거나 향상시키는 것.
- **절차**: (1) 초기에는 무작위 혹은 격자 기반으로 소수의 샘플을 수집, (2) GPM‑NN을 이용해 전체 공간에 대한 불확실성(예: 예측 분산) 추정, (3) 정보 이득이 가장 큰 지점을 선택해 다음 비행 경로에 포함, (4) 선택된 경로를 UAV가 순차적으로 호버링·측정, (5) 새로운 데이터가 추가되면 모델을 재학습하고 반복.
- **효과**: 실험 결과, 동일 비행 시간 대비 측정 포인트 수를 30 % 이상 감소시켰으며, 평균 절대 오차(MAE)가 기존 랜덤 워크·선형 회귀 기반 방법보다 15 %~20 % 개선됨.
5. **실험 및 평가**
- **시나리오 1 – 2D 도로공원**: 5 m 격자(총 400여 포인트) 중 120포인트만 측정 후 GPM‑NN으로 나머지 예측. RMSE 4.2, MAE 3.1 (기존 가우시안 플룸 RMSE 6.8, MAE 5.0).
- **시나리오 2 – 3D 건물 안뜰**: 5 m·5 m·5 m 격자(총 250포인트) 중 80포인트만 측정. 높이 축 농도 변화(특히 10 m~15 m 구간) 정확히 포착, RMSE 5.0, MAE 3.8 (기존 랜덤 워크 RMSE 8.3, MAE 6.5).
- **전력 소비**: 적응형 알고리즘 적용 시 평균 비행 시간 9분, 전력 소모 0.68 kWh vs. 전통적 전면 탐사 시 13분, 1.02 kWh.
6. **결론 및 향후 과제**
- **핵심 기여**: (1) 물리‑데이터 융합 GPM‑NN 모델을 통해 미세 입자 확산을 정확히 예측, (2) 배터리 효율을 극대화하는 적응형 측정 경로 설계, (3) UAV 기반 초고해상도 2D·3D AQI 지도 최초 구현.
- **제한점**: 현재는 단일 UAV에 의존, 풍향·풍속 실시간 업데이트가 제한적, 고도 변화가 큰 복합 도시 환경에서의 일반화 필요.
- **미래 연구**: 다중 UAV 협업을 통한 대규모 도시 커버리지, 실시간 기상 모델과의 통합, 강화학습 기반 경로 최적화, 그리고 센서 소형화·에너지 회수 기술 적용을 통해 실시간 도시 전역 모니터링 시스템으로 확장 가능성을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기