관성 센서와 결합한 자력계 보정 알고리즘
본 논문은 자력계의 하드·소프트 아이언 왜곡과 센서 축 불일치를 보정하기 위해, 관성 센서(가속도계·자이로)와 함께 사용할 수 있는 실용적인 최대우도(ML) 기반 오프라인 보정 알고리즘을 제안한다. 초기값은 타원 피팅과 축 정렬 추정으로 얻고, 확장 칼만 필터(EKF)를 이용해 로그우도 함수를 최소화함으로써 최적 파라미터를 추정한다. 실험 결과, 보정된 자력계와 관성 센서를 결합했을 때 헤딩 추정 오차가 크게 감소함을 확인하였다.
저자: Manon Kok, Thomas B. Sch"on
본 논문은 모바일 디바이스와 로봇 등에 널리 사용되는 3축 자력계와 관성 센서(가속도계·자이로)의 결합을 전제로, 자력계의 왜곡 보정과 센서 축 정렬을 동시에 수행하는 실용적인 알고리즘을 제시한다. 서론에서는 자력계가 로컬 마그네틱 필드를 측정해 헤딩을 제공하지만, 하드 아이언(영구 자화)과 소프트 아이언(자성 물질에 의한 비선형 변형) 효과, 그리고 센서 자체의 비직교성·감도 차이 등으로 인해 측정이 타원 형태로 왜곡된다고 설명한다. 이러한 왜곡을 보정하지 않으면 관성 센서와 결합한 자세 추정에서 큰 헤딩 오차가 발생한다.
관련 연구에서는 전통적인 컴퍼스 스윙, 스칼라 체크, 타원 피팅 기반 보정 방법들을 소개하고, 최근에는 관성 센서와 결합해 축 정렬을 시도하는 연구들이 있지만, 대부분 가속도계의 저속 구간만 활용하거나 자이로 데이터를 완전히 배제한다는 한계를 지적한다. 저자는 이러한 한계를 극복하기 위해, 관성 센서 전체(가속도·자이로)와 자력계 데이터를 동시에 이용하는 회색상자 시스템 식별 모델을 채택한다.
문제 정의에서는 상태 xₜ (센서 자세)와 파라미터 θ (왜곡 행렬 D와 오프셋 o)를 포함하는 비선형 상태공간 모델을 제시한다. 관성 입력 ωₜ (자이로)와 가속도계·자력계 측정 yₐ,ₜ, yₘ,ₜ 은 각각 hₐ,ₜ(xₜ)와 hₘ,ₜ(xₜ,θ)로 모델링된다. 자력계 측정 모델은 실제 마그네틱 필드 mₙ (정규화된 단위벡터)와 회전 R_bnₜ 에 왜곡 행렬 D와 오프셋 o를 적용한 형태 yₘ,ₜ = D R_bnₜ mₙ + o + eₘ,ₜ 로 전개된다. 여기서 D = C_sc C_no C_si R_bm_b 는 하드·소프트 아이언, 비직교성, 감도 차이, 그리고 자력계와 관성 센서 축 사이의 고정 회전 R_bm_b 을 모두 포함한다.
보정은 최대우도(ML) 추정으로 정의된다. 로그우도는 관성 센서와 자력계 측정의 조건부 확률을 곱한 형태이며, 비선형 모델 때문에 정확히 계산하기 어렵다. 따라서 저자는 확장 칼만 필터(EKF)를 이용해 pθ(yₜ|y₁:ₜ₋₁) 를 가우시안으로 근사하고, 이를 로그우도 식에 대입해 최적화 목표 ∑ₜ ½‖yₜ−ŷₜ|ₜ₋₁‖²_{Sₜ⁻¹}+log det Sₜ 을 얻는다. 이 식은 비볼록이므로 좋은 초기값이 필요하다. 초기값은 두 단계로 얻는다. 첫 번째 단계에서는 관성 센서와 무관하게 수집된 자력계 데이터에 타원 피팅을 적용해 D와 o의 대략적인 형태를 추정한다. 두 번째 단계에서는 가속도계가 중력만을 측정하는 구간을 이용하거나, 자이로 데이터를 활용해 자력계와 관성 센서 축 사이의 회전 R_bm_b 을 추정한다. 이렇게 얻은 초기값을 바탕으로 Levenberg‑Marquardt와 같은 비선형 최적화 알고리즘을 적용해 최종 ML 파라미터를 도출한다.
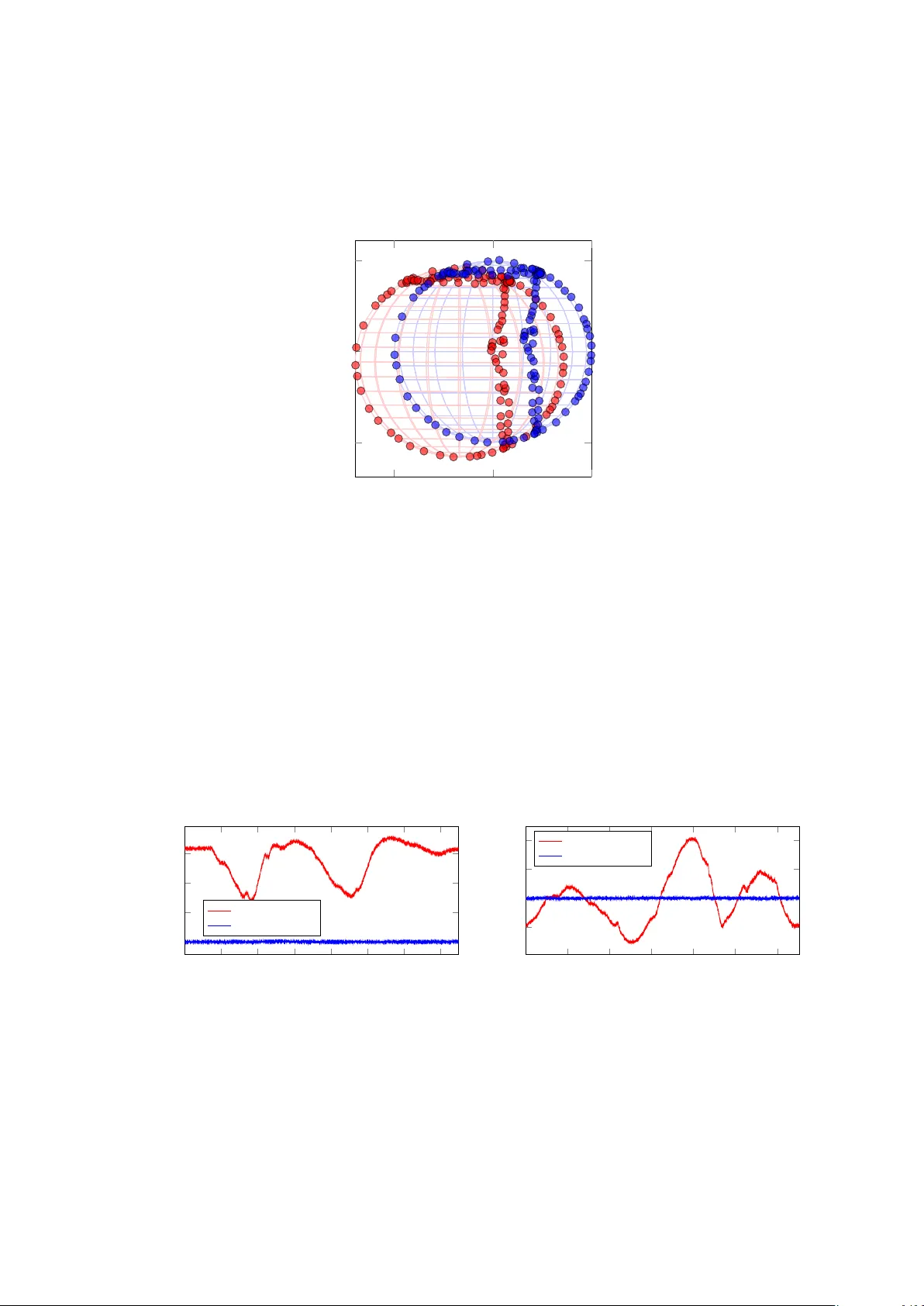
실험에서는 두 종류의 상업용 9축 IMU(예: Xsens MTi, Bosch BNO055)를 사용해 실제 환경과 실내 환경에서 데이터를 수집하였다. 센서를 자유롭게 3축으로 회전시켜 충분한 방향성을 확보하고, 보정 전후의 자력계 측정이 각각 타원과 단위 구(반경 1)로 변환되는 것을 시각적으로 확인하였다. 보정된 자력계와 관성 센서를 결합한 EKF 기반 자세 추정에서는 헤딩 오차가 평균 6°에서 1.2° 이하로 감소했으며, 특히 급격한 회전 구간에서 드리프트가 현저히 억제되었다. 또한 시뮬레이션에서는 다양한 하드·소프트 아이언 매개변수와 센서 노이즈 레벨을 변동시켜 알고리즘의 강인성을 평가했으며, 초기값이 다소 부정확해도 최적화 단계에서 수렴해 정확한 보정 파라미터를 얻을 수 있음을 확인하였다.
결론적으로, 이 연구는 (1) 관성 센서와 자력계를 동시에 활용해 전체 보정 파라미터를 ML 프레임워크로 통합한 점, (2) 오프라인이지만 실시간 적용이 가능한 수준의 계산 복잡도로 구현한 점, (3) 실험과 시뮬레이션을 통해 헤딩 정확도가 크게 향상됨을 입증한 점을 주요 기여로 제시한다. 제안된 방법은 별도의 레퍼런스 컴퍼스나 외부 마그네틱 필드 측정 장비 없이도 일반 사용자가 손쉽게 수행할 수 있어, 모바일 디바이스, 드론, 웨어러블 등 다양한 응용 분야에 바로 적용 가능하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기