다각형 지형에서 최단 하강 경로를 위한 근사 알고리즘
본 논문은 다각형 지형 위에서 높이가 감소하는 최단 경로(SDP)를 찾는 문제에 대해, 두 가지 완전다항시간근사스킴(FPTAS)을 제시한다. 기존의 정확 알고리즘이 존재하지 않던 일반 지형에 대해, 수평 평면으로 지형을 슬라이스하고 스테인러 점을 배치해 그래프화함으로써 (1+ε) 근사 해를 효율적으로 구한다. 첫 번째 알고리즘은 경사각에 의존하는 O(n²·X·ε⁻¹·log(n·X·ε⁻¹)) 전처리와 빠른 쿼리를 제공하고, 두 번째 알고리즘은 경…
저자: Mustaq Ahmed, S, ip Das
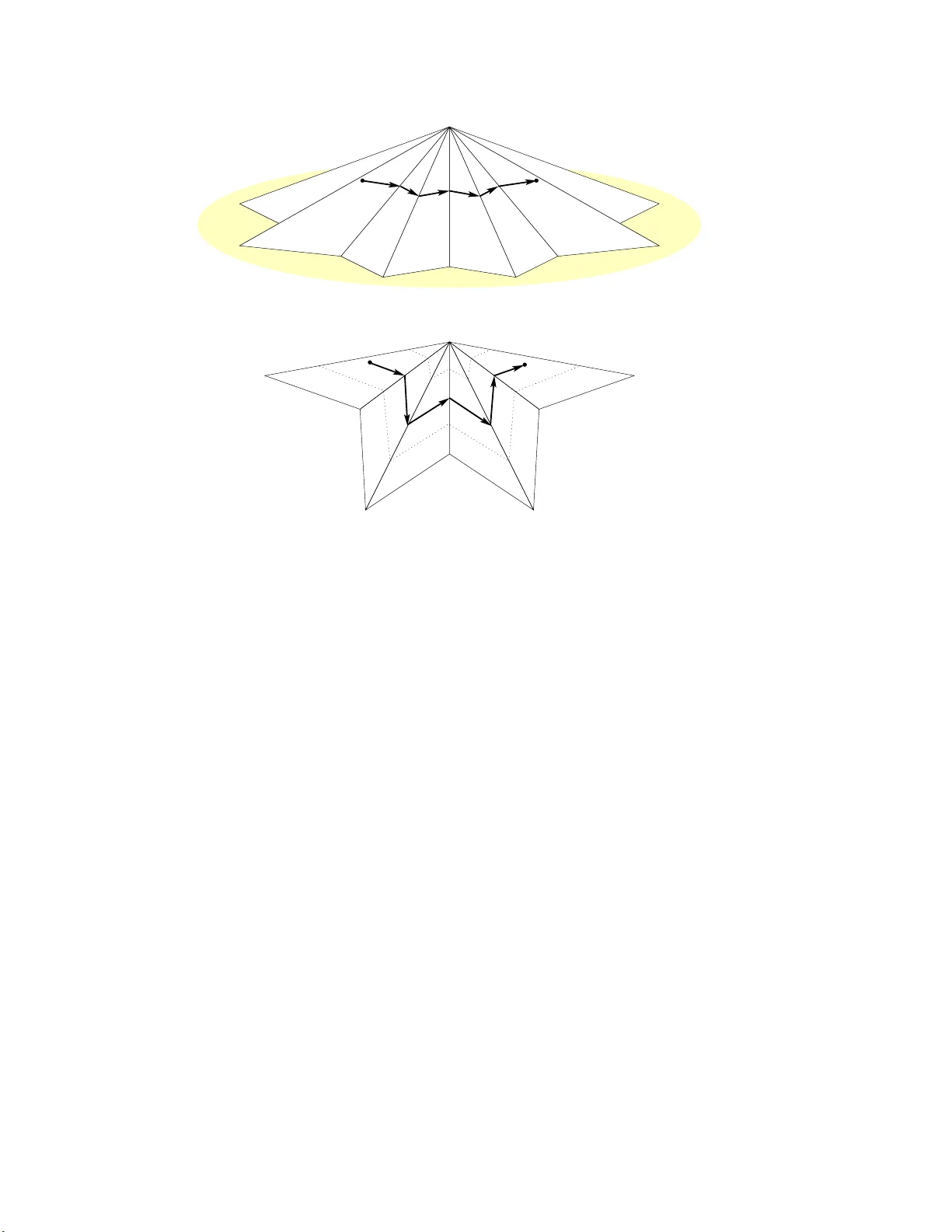
논문은 먼저 “Shortest Descending Path”(SDP) 문제를 정의한다. 다각형 지형은 3차원 공간에 놓인 삼각형 면들의 집합이며, 각 점 p의 높이 h(p)는 z‑좌표이다. SDP는 시작점 s에서 목표점 t까지 이동하면서 높이가 절대 감소하지 않는 경로 중 길이가 최소인 것을 찾는 문제이다. 기존 연구에서는 두 점 사이에 하강 경로가 존재하는지 여부만을 O(n log n) 전처리 후 O(log n) 쿼리로 판단할 수 있었지만, 최단 경로 자체를 구하는 효율적인 알고리즘은 알려지지 않았다. 또한, 연속 다익스트라 방식이나 면을 펼쳐 직선으로 만드는 기법은 하강 제약 때문에 적용이 어려웠다.
저자들은 이 난관을 극복하기 위해 두 가지 근사 알고리즘을 제안한다. 공통적인 아이디어는 지형을 수평 평면으로 슬라이스하고, 각 평면이 교차하는 지점에 스테인러 점을 삽입함으로써 연속적인 하강 경로를 보장하는 그래프를 만든다는 것이다. 이때 삽입되는 평면은 모든 정점을 통과하는 평면과, 정점 사이에 충분히 촘촘히 배치된 보조 평면으로 구성된다. 평면 간 간격은 지형의 기하학적 파라미터 L(가장 긴 변 길이), h(가장 작은 2D 높이), 그리고 θ(비수평 변과 수직선 사이의 최대 급각)를 이용해 정의된 X = L·h·sec θ 혹은 X′ = L·h 로 결정된다. 이렇게 하면 각 변에 O(X·ε⁻¹) 개의 스테인러 점이 배치되고, 전체 스테인러 점 수는 O(n²·X·ε⁻¹) 수준으로 제한된다.
첫 번째 알고리즘은 X = L·h·sec θ 를 사용한다. 전처리 단계에서 모든 스테인러 점을 생성하고, 각 변에 대해 인접한 평면 사이의 구간을 정리한다. 이후 Bush‑whack 알고리즘을 적용해 그래프의 최단 경로 트리를 구축한다. 전처리 시간은 O(n²·X·ε⁻¹·log(n·X·ε⁻¹))이며, 쿼리 시간은 목표점 v가 정점이거나 스테인러 점일 경우 O(n) , 그 외의 경우 O(n·ε⁻¹) 로 제공된다. 이 알고리즘은 급경사면이 많은 지형에서 효율적이며, ε가 작을수록 근사 정확도가 높아진다.
두 번째 알고리즘은 θ에 의존하지 않는 X′ = L·h 를 사용한다. 전처리 단계는 첫 번째와 유사하지만, 평면 간 간격을 더 균일하게 잡아 경사각에 무관하게 스테인러 점을 배치한다. 결과적으로 전처리 시간은 O(n²·X′·ε⁻¹·log²(n·X′·ε⁻¹)) 로 다소 증가하지만, 쿼리 시간은 첫 번째와 동일하게 O(n) 와 O(n·ε⁻¹) 로 유지된다. 이 방법은 거의 평평한 지형이나 비수평 변이 거의 없는 경우에 더 나은 성능을 보인다.
두 알고리즘 모두 “하강 경로는 동일 면 내부에서 두 번 교차하지 않는다”는 기하학적 성질을 활용한다. Bush‑whack 알고리즘은 각 변 쌍(e, e′)에 대해 동적 구간 리스트 Iₑ,ₑ′ 를 유지함으로써, 현재 탐색 중인 스테인러 점 v에 대해 다음 후보 노드들을 효율적으로 제한한다. 이는 전통적인 다익스트라가 모든 인접 노드를 검사하는 것에 비해 O(|V| log |V|) 의 시간 복잡도를 달성하게 한다. 또한, 스테인러 점을 독립적으로 배치하는 기존 방법과 달리, 수평 평면을 이용한 전역적인 높이 조정이 가능해 “높이 손실 없이” 연속적인 하강 경로를 보장한다.
실험적 평가는 논문에 포함되지 않았지만, 이론적 분석을 통해 두 알고리즘이 각각 O(n²·poly(1/ε, L, h, θ)) 의 시간·공간 복잡도를 갖는 FPTAS임을 증명한다. 또한, 전처리와 쿼리 단계가 명확히 구분돼 실제 시스템에 구현하기 쉬우며, “하이브리드” 전략을 통해 지형의 경사 특성에 따라 두 알고리즘 중 최적의 것을 선택할 수 있다. 최종적으로, 이 연구는 일반 다각형 지형에서 SDP 문제에 대한 최초의 다항 시간 근사 해법을 제공함으로써, 로봇 경로 계획, 관개용 수로 설계, 산악 구조 등 다양한 응용 분야에 실질적인 영향을 미칠 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기