A Minimum-Energy Control Approach for Redundant Mobile Manipulators in Physical Human-Robot Interaction Applications
Research on mobile manipulation systems that physically interact with humans has expanded rapidly in recent years, opening the way to tasks which could not be performed using fixed-base manipulators. Within this context, developing suitable control m…
Authors: Davide Tebaldi, Niccolò Paradisi, Fabio Pini
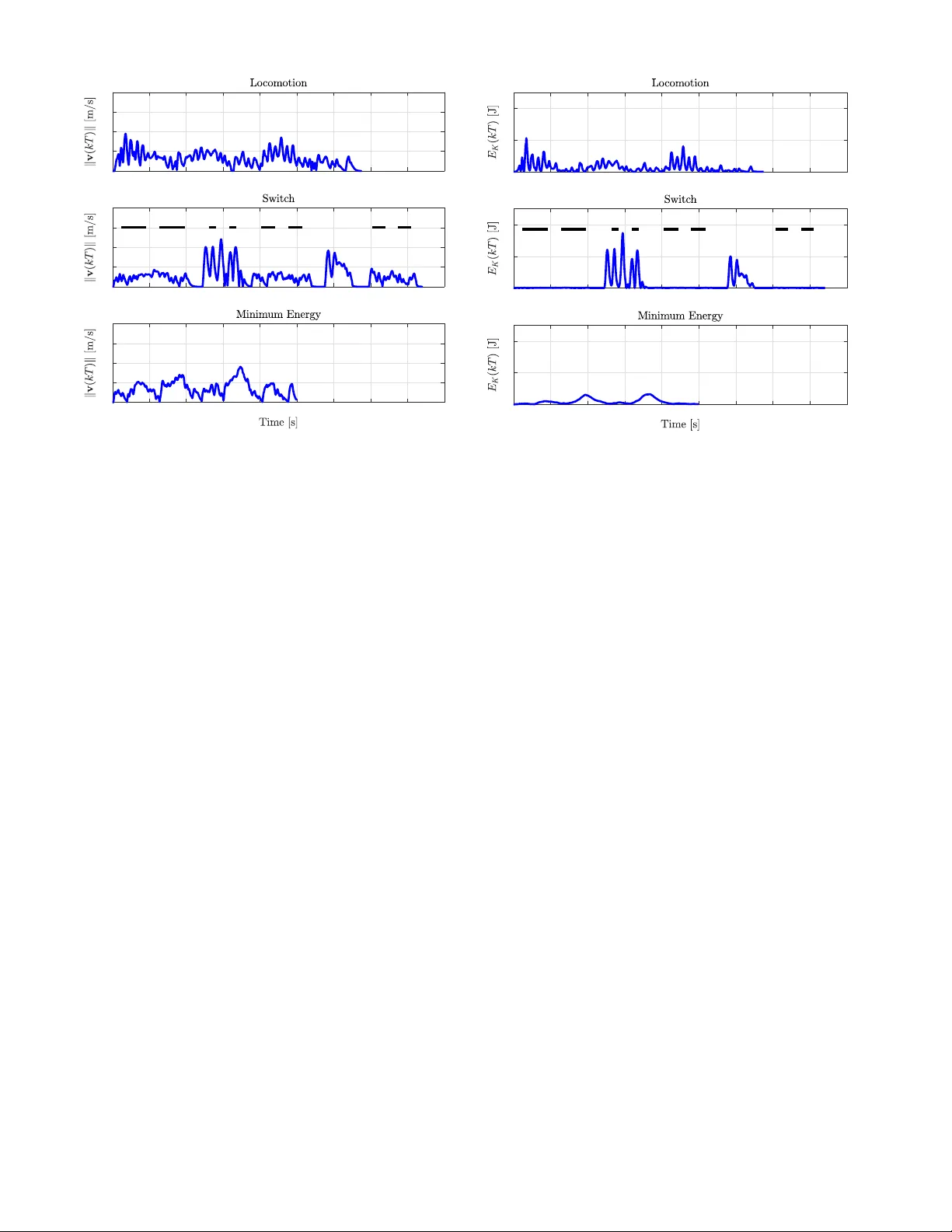
A Minimum-Energy Co ntro l A ppr oach f or Redundant Mo bile Manipulators in Phy sical Human-Robot Interaction A pplications Davide T ebaldi 1 , Niccol ` o Parad is i 2 , Fabio Pini 1 and Luigi Biag iotti 1 Abstract — Research on mobile manipulation systems th at physically interact with humans has expanded rapidly in recent years , o pening the way to tasks w h ich could not b e perfo rmed using fi xed-base manipulators. Within this context, developing suitable control meth odologies is essential since mobile manip- ulators introduce additional degrees of freedom, making the design of control approaches more challenging and more p rone to performa nce optimization. This paper proposes a control approach for a mobile manip u- lator , composed of a mobile base equipp ed with a robotic arm mounted on the top, with the objective of min imizing the ov erall kinetic energy stored in the whole-body mobile mani p ulator in physical human-robot interaction applications. The approach is experimentally tested with refer en ce to a peg-in - hole task, and the results demonstrate th at the proposed approach reduces the o verall kinetic energ y sto red in the whole-body robotic system and improv es the system p erformance compared with the ben chmark meth od . Index terms— Mo bile Manipu lator, Inverse Differential Kinematics, Physical Hum an-Robo t Inter action. I . I N T RO D U C T I O N The in terest in collaborative ro botics ap plications has significantly increased in th e last two d ecades. This includ es applications su c h as rehab ilitation r obotics [1] , [2], robot- assisted surger y [3], a n d in dustrial task s [4 ]. The aforemen tioned application s typically inv olve the use of fixed-base man ipulators to acco mplish these tasks. H owever , certain tasks such as co -transpor ta tio n [5], which can be physically dema n ding and affect the opera to r’ s h ealth, can gain sign ificant benefit f rom th e use of a m obile ma n ipulator . This co ncept falls within the a rea of th e so-called huma n augmen ta tio n field, which exploits the use of techn ologies in co njunction with human capab ilities [6]. This m akes it possible to overcome human bo dy limitations and to enhan ce human a bilities. The considered mobile man ip ulator is sho wn in Fig . 1(a), 1 The authors are with the Department of Enginee ring “Enzo Ferrari ”, Uni versity of Modena and Reggio Emilia, via Pietro Vi va relli 10, 41125 Modena, Italy , e-mail: davide.te baldi@ unimore.it, fabio.pini@u nimore.it, luigi.bi agiott i@unimore.i t. 2 The author is with the Department of Engi- neering for Innov ation Medicine, Unive rsity of V erona, e-mail: niccol o.paradisi @student i.univr .it. The work was funded under the National Reco very and Resilien ce Plan (NRRP), Mission 04 Component 2 Inv estment 1.5 – NextGenera tionEU, Call for tender n. 3277 dated 30/12/2021 A war d Num ber: 0001052 dated 23/06/20 22, and was supported by the Italian National Recove ry and Re- silienc e Plan (PNRR), Mission 4 “Education and Researc h”, Component C2, In vestment 1.1 “PRIN – Projects of Rele vant National Interest” , Project I- SHARM: Intell igent SHared Autonomy for Robotic Manipula tion Systems, Project ID 2022NTZRFM, CUP E53C240026000 06. This work has been submitted to the IEEE for possible publica tion. Copyri ght may be transferred without notice, after which this version may no longer be accessib le. (a) (b) Fig. 1 : ( a) Considered mobile manip ulator and ( b) an exam- ple of Human/Mob ile Man ipulator co operative task. while th e considere d scenario is dep ic te d in Fig. 1(b ) , show- ing the mob ile robot equipp ed with a hand le. In this scenario, the hu man interacts with th e end -effector to perform a peg-in-ho le task. A classical architectu r e fo r human-ro bot interaction applications is shown in Fig. 2 [7] –[11] . This architecture dep icts a human operato r in ter acting with the robot th rough the fo llowing vir tual ad m ittance dyn amics M ˙ v d + B v d = f h , (1) where M , B ∈ R (6 × 6) are th e virtu al mass and da m per ma- trices, f h ∈ R (6 × 1) is the h uman wr e nch, and v d ∈ R (6 × 1) is the gen erated desired twist in oper a tional space of the end - effector . Th e ad mittance model (1) can also be rep resented using the Power -Orie n ted G r aphs (POG) representation of Fig. 3, wh ich clearly hig hlights the energetic po rt at which the hum a n oper a tor inter a cts with the virtu al ad mittance model to g e nerate the desire d end -effector twist v d . By solving the In verse Differential Kinem atics (I DK) in Fig. 2, the desired veloc ities ˙ q d in th e join t space f or the mobile base an d fo r the m a nipulator arm are determine d . In th is paper, we propo se an app roach to solve the IDK problem wh ich en ables to minimize the kinetic energy stored in the wh ole-bod y ro botic system. The advantages of the propo sed co ntrol, emerging f rom th e experimental validation, in clude a smoother user experience compare d to the conside r ed benchma r k and a shorter execu- tion time, as well as the expected red uction of the overall kinetic energy stor e d in th e who le-body ro botic s ystem. Minimizing the kin e tic energy stored in the system also Fig. 2: A r chitecture for p hysical in teraction between a hu - man operator and a mobile manipulator through a virtual admittance m o del. Fig. 3: Power-Oriented Grap h ( POG) re presentation of the virtual admittan ce model, showing the energetic port o f the interaction b e tween the hum a n operato r and th e ad mittance model to g e nerate the desire d end -effector twist v d . translates into min im izing the movements of the heaviest system componen t, tha t is the mo b ile base weighing 1 15 kg. In turn , this also allows to enhance th e safety of the resulting physical interactio n between the hu man and the mobile manipula to r . The remain d er o f this paper is o rganized as f ollows. The related works are discussed in Sec. II. The prop osed con trol approa c h is pre sented in Sec. II I, while the experimental setup is described i n Sec. IV. The ob tained results are presented a n d discussed in Sec. IV -A, while the conclu sio n s of th is work are rep o rted in Sec. V. I I . R E L AT E D W O R K S Most of the related works in the literature employ standard inverse differential k inematics o r inv erse kinematics approa c h es f or red undan t rob o ts to transform velocities from the operation al space to the joint space. For instan c e, in [1 2] they propose a co ntrol ap p roach based on inverse kinematics. Specifically , they apply the F ABRIK algo rithm [13], or ig inally meant f or fixed-ba se man ipulators, to m obile manipulato rs, with the o bjective of p erform ing path tracking tasks. This appro a ch allows to dr iv e mob ile base and manipulato r arm while satisfyin g additional r equireme n ts, such as ob stacle avoidance and joint limits av oidance. In [14 ], the in verse kin ematics problem is solved as an optimization problem , to av o id joint limits and perform collision avoidance. In the contr o l f ramework illustrated in Fig. 2, the in verse kinem atics o f the mobile man ipulator is no t n eeded. Howe ver, as p reviously mentioned , it is necessary to solve the inv erse d ifferential kinem atics problem , which co n sists in solving th e f ollowing r elation with respect to ˙ q d : v d = J ( q ) ˙ q d (2) where J ( q ) = J a ( q a ) J b (3) is th e Jaco b ian of the w h ole system, where a s J a ∈ R 6 × 6 and J b ∈ R 6 × 3 are the Jaco b ians of th e manipulato r arm a n d of the mobile b ase, respectively . The desired end-effector twist in th e ope r ational space and the desired join t veloc ity vector are given b y , respectively: v d = v x d v y d v z d ω x d ω y d ω z d and ˙ q d = " ˙ q a d ˙ q b d # = ˙ q 1 d . . . ˙ q 6 d v bx d v by d ω bz d . (4) Note that v ector ˙ q d is comp osed of both the desired arm joint velocities ˙ q a d and the desired vir tu al join t velocities ˙ q b d of th e mobile base, which must be transfor med and applied to the b ase’ s wheels. Since a n omnidir ectional base is considered , these v irtual velocities correspo n d to th e linear velocities v bx d , v by d along the x , y directio ns and to the angular velocity ω bz d about the z a xis. In [ 1 5], the In verse Differential Kinematics (IDK) is solved by formu lating a Quadratic Program m ing (QP) pro b- lem, minimizing a joint velocities quad ratic cost th at in c ludes a man ipulability index of the rob ot ar m. The optimiza tion is perfor med by includ ing the co nstraint indicated in Eq. (2), so as to guaran tee an adm issible solution of th e IDK and f u rther constraints in term s o f joint velocity and position limits. It is important to highlight that the method they p ropose is intended fo r gener al-purp o se ap plications; however , du e to the co mputation al time requ ired for solving th e QP pr o blem (which, as repo rted in the pap er , takes at least 4. 8 seconds) it is no t su itab le fo r real- tim e scenarios such as the o ne described in the architecture of Fig . 2, w h ere the r eference twist is gene rated thr ough human –robo t inter action an d must be translated in rea l time into correspo nding join t velocities. For this reason , in all works inv olvin g physical inter action between a m o bile m anipulator and a human o perator, the in verse differential kinematics pr oblem is typ ically addressed using a closed -form solution , generally ba sed on the pseu - doinv erse o f the Jaco bian matrix J ( q ) [7]– [9]. For instanc e , this approa c h is adopted in [16 ] , where the author s conside r a scenar io in w h ich a mob ile manipu lator assists individuals with mobility impairme nts in walking. I n the ir m ethod, v ir- tual d a m ping is ada p tiv ely tu n ed using fuzzy logic b ased o n the hu man’ s intent, and a null- space contro ller is employed to av oid singu la r configur ations. The app roach propo sed in [ 1 0], [11] , which serves as a benchm a rk in the experimental evaluation of our method, addresses th e IDK pr oblem using a prio ritized con tr ol tech- nique. Th e resulting solutio n consists of two co ntributions, namely: ˙ q d = ˙ q d,p + N ( J ( q )) ˙ q d,s , (5) where N ( J ( q )) = I − J † ( q ) J ( q ) is a p rojector onto th e null space of the Jacob ian. Th e ter m ˙ q d,p accomplishes a p rimary task consisting in solving the dam ped least-squa r es pro blem minimizing the fo llowing ob jectiv e f unction: L p ( ˙ q d ) = 1 2 k v d − J ( q ) ˙ q d k 2 ω α + k ˙ q d k 2 ω β , (6) with the two term s ω α and ω β denoting two weight matrice s. The term ˙ q d,s accomplishes a second ary task consisting, in th e considered case, in m inimizing the d istance f rom a preferr ed co nfiguratio n q des [10]: L s ( q ) = 1 2 k q des − q k 2 G , (7) with the term G being a gain m a trix. T he clo sed-form solution o f (5) consid e ring th e ob jectiv e functio n s ( 6) and (7) is the f ollowing: ˙ q d = ( J ( q ) ⊤ ω α J ( q ) + ω β ) − 1 J ( q ) ⊤ ω α v d + + N ( J ( q )) G ( q des − q ) . (8) I I I . P R O P O S E D A P P RO AC H Reference is made to the control architectu re d e picted in Fig. 2. Th e ob jectiv e of the pr oposed ap p roach is to solve the IDK prob lem so as to minimize the kinetic energy stor ed in the who le - body redu ndant mobile ma n ipulator, which is composed o f the mobile base and th e robotic arm, d u ring the execution o f th e task. In d oing so, the movemen ts of the h eaviest system com p onent, that is the mob ile base, will be min imized, ther eby enh ancing safety in physical h uman- robot interaction. The resulting form ulation corr esponds to a weighted pseu doinv erse using the inertia matrices M a ( q a ) and M b of the arm manipulator and of the m obile base, respectively . A. Optimization Pr ob lem F ormulation Reference is ma d e to the redund ant mobile ma n ipulator consisting of a mobile base an d a r obotic arm shown in Fig. 1. The IDK problem is solved thro u gh the follo win g optimization problem . Optimization Problem 1 : Find the optimal desired arm joint velocities ˙ q ∗ a d and th e op timal desired virtual joint velocities ˙ q ∗ b d such th at: min ˙ q a d , ˙ q b d E K ( q a , ˙ q a d , ˙ q b d ) (9) where the ob jectiv e function E K ( q a , ˙ q a d , ˙ q b d ) = 1 2 ˙ q ⊤ a d M a ( q a ) ˙ q a d + 1 2 ˙ q ⊤ b d M b ˙ q b d (10) represents the total kinetic energy of the whole- body ro botic system, with M a ( q a ) and M b being the in ertia matr ices o f the ar m manipu lator and of the mob ile base, respecti vely , subject to th e con straint J a ( q a ) ˙ q a d + J b ˙ q b d = v d . (11) Note tha t th e constraint (1 1) derives from ( 2 ), ( 3) an d (4). Property 1: The optimal solution ˙ q ∗ d = ˙ q ∗ a d ˙ q ∗ b d ⊤ solving the o ptimization p roblem ( 9) is given b y ˙ q ∗ d = J † M ( q ) v d , (12) where v d is the desired operationa l- space twist defined in (4 ), and q = q a q b ⊤ is the vector of genera lized coo rdinates. The m atrix J † M ( q ) = M ( q a ) − 1 J ( q ) ⊤ J ( q ) M ( q a ) − 1 J ( q ) ⊤ − 1 (13) is th e dy namically c o nsistent Jacobian pseu doinv erse [1 7 ], with the wh ole-bod y ine rtia matr ix M ( q a ) defined as M ( q a ) = M a ( q a ) 0 0 M b . (14) Pr oof. The op timization p roblem (9) can be equiv alently rewritten in th e f ollowing m atrix f orm: min ˙ q d E K ( q a , ˙ q d ) , subject to J ( q ) ˙ q d = v d , (15 ) where th e total kinetic energy E K ( q a , ˙ q d ) is exp r essed by the following ma tr ix qu adratic fu n ction: E K ( q a , ˙ q d ) = 1 2 ˙ q ⊤ d M ( q a ) ˙ q d , with the inertia matr ix M ( q a ) being defined in ( 14). T h e Lagrang ian o f (1 5) is the fo llowing: L = 1 2 ˙ q ⊤ d M ( q a ) ˙ q d + λ ⊤ ( v d − J ( q ) ˙ q d ) , which yields the following first-order optimality (KKT) condition s [ 18]: M ( q a ) ˙ q d + J ( q ) ⊤ λ = 0 , (16) J ( q ) ˙ q d = v d . (17) Solving (1 6) and (17) for ˙ q d yields th e o ptimal solution ˙ q ∗ d in (12). From ˙ q ∗ d , the op timal arm joint an d base velocities ˙ q ∗ a d and ˙ q ∗ b d can be extrac te d recalling the definition of vector ˙ q d in (4). The desired velocities ˙ q d in th e join t space u sed in the control ar chitecture o f Fig. 2 ar e then given by : ˙ q d = ˙ q ∗ d + N ( J ( q )) ˙ q d,s , (18) where N ( J ( q )) = I − J † M ( q ) J ( q ) is a projector o nto the null spa ce of th e Jacobia n and wher e ˙ q d,s = G ( q des − q ) , (19) to ensure the end -effector does n ot deviate excessively from the prefer r ed co nfiguratio n. Fig. 4: Ex p erimental test scenario, co nsisting in perf o rming a peg-in-ho le task with respect to th e holes en circled in red. I V . E X P E R I M E N TA L R E S U LT S The em ployed mobile ma n ipulator is shown in Fig . 1, which is composed of the UR10e cobot and o f the Rob ot- nik RB-KAIR OS+ omnid irectional mobile ba se. The force sensor used is a n FTE- AXIA80. The end -effector of th e ar m consists in the peg-a n d-han dle system sh own in Fig. 1. T wenty- se ven pa rticipants took p art in the study . The user s were a sked to perfo rm the task depicted in Fig. 4 , co nsisting in inserting the peg in to a set of holes to p e rform a p eg-in- hole task. The task was executed using the following thr ee different control a p proach es: (a) the locomotio n mo de in [10 ], [11] ; (b) the switch mo de in [10], [1 1], where in th e latter the user is allo wed to switch between manip ulation an d locomotio n o p erating m o des wh e never d esired; (c) the pro posed min imum-en e rgy app roach, i.e. the con - trol architecture o f Fig. 2 solving the I DK problem throug h Opt imization Problem 1 in Sec. III- A. The v ir tual inertia m atrix M an d the virtual friction m atrix B in (1) were set to M = diag(4 ,. . . , 4) and B = diag(75 ,. . . , 75 ) , while the gain ma tr ix G , in (8) and (19) for the locom otion and for the minimum - energy appr oaches, respectively , was set to G = diag (1 , 1 , 1 , 1 , 1 , 1 , 0 , 0 , 0) . The acquired qua n tities include the norm of th e velocity vector k v ( k T ) k , the norm of the huma n force vector k f h ( k T ) k (with the ro tational compo nents held constant du e to the n a- ture of the task, which requires th e peg to remain or thogon al to the wall), and th e total stored kinetic en ergy E K ( k T ) , as defined in (10), ev alu ated at discrete tim e in stants t = k T . From these, the average ene rgy ¯ E , the average h uman f o rce ¯ F h and th e average execution velocity ¯ v have been co mputed as f ollows: ¯ E = 1 N N X k =1 E K ( k T ) , ¯ F h = 1 N N X k =1 k f h ( k T ) k , ¯ v = 1 N N X k =1 k v ( k T ) k . (20) The execution time T f is g iven by: T f = N T . (21) Let p des = FK ( q des ) be the desired po sition in the operation al space, wher e “FK” is the fo rward kinematics operator and q des is the ref erence p osition in the joint space introdu c ed in (8) an d (19), and let p = FK ( q ) . The final displacement x f is g iven by: x f = k p ( T f ) − p des k , (22) where T f is the execution time defin ed in ( 2 1). The average energy ¯ E , th e av erage human force ¯ F h and the average execution velocity ¯ v in (20), as well as the final displac ement x f in (2 2) and the execution time T f in (21), have b een a cquired for each execution of the 27 different users for each o f the three aforem entioned control approa c h es: loco m otion (a), switch (b) a n d the propo sed minimum- energy appro ach ( c). The exper imental results are sh own in Fig . 5, Fig. 6, Fig. 7 as well as in T able I, T able II and T ab le III, an d are presented and discussed in th e following section. A. Results Pr e sentation an d Discussion The task of Fig. 4 was per formed using the thr ee control approa c h es (a) , (b) and (c) depicted in Sec. IV. The r esults in terms of average energy ¯ E , av erage hu man force ¯ F h and average execution velocity ¯ v computed as in (20), and in terms of final displacemen t x f computed as in (2 2) and of execution time T f computed as in (21), are reported in Fig. 5. The boxplo ts show the execution results of the 27 different users using the thre e co nsidered control approa c h es. Furth ermore, the median values of these metrics out o f the 27 executions from the d ifferent users, which are plotted in r ed in Fig. 5, are rep orted in T ab le I, T able II and T able I II for the thr ee c ontrol approac h es locom otion, switch and minimum- energy , respe c ti vely . By com paring the med ian results, the fo llowing con c lu- sions can be drawn. Th e average h uman fo r ce ¯ F h indicates that the locom o tion approach requ ires the h ighest huma n effort due to th e extensive use of the mobile b a se. In contrast, th e switch an d m inimum- e n ergy appro aches reduce the effort by appro ximately 4 1% an d 2 2% , re sp ectiv ely . This is consistent with the correspond ing differences in av erage execution spe ed ¯ v and with the mobile base being the h eaviest system com ponen t. The mobile base u sage is predom inant in the lo comotion app roach, u ser-dependent in the switch app roach ( leading to hig h er cog n itiv e load an d longer execution time) , and automatically m in imized in the minimum- energy app roach thr ough Opt imization Problem 1 in Sec. I I I-A. The average total kinetic energy ¯ E is ap proxim ately 69% and 66 % lower in the switch and m inimum-e n ergy approa c h es, respectively , than in the locomotio n approach . The switch and minimum- energy approac h es ach iev e similar energy levels; howe ver, th e fo rmer relies on u ser interven- tion to limit mobile base usage, wh ereas the latter han dles this tr a de-off automatically , resulting in a smoo th er ene rgy Fig. 5: Results in terms of av erage energy ¯ E , average human force ¯ F h , average execution velocity ¯ v , final displace m ent x f and execution time T f for the executions of ea c h of th e 27 users using the thr ee con trol appr oaches. profile. Moreover , in the swit ch approach the whole-bod y stored kinetic en ergy strong ly depen ds on user exp e r ience in proper ly d etermining when to switch, while in th e minimu m- energy approach it is co nsistently regulated by Optimizatio n Problem 1 . The absence of s witching operatio ns in the locomo tion and minimum -energy approach es also impr oves the execu- tion time. Th e metric T f shows that the minim um-energy approa c h ach iev es the lowest median execution time, ap- proxim a tely 24 % lower than the switch ap proach and 11% lower than the locomo tio n app r oach. The switch appro ach is slower due to the cu m ulative delay in troduce d by repeated switching, which needs to be per f ormed manually [10] . This delay is ab sent in th e m inimum- e n ergy app roach, wh e re sub- system coor dination is au to matically manag ed, also reducin g ¯ E [J] ¯ F h [N] ¯ v [ m / s ] x f [m] T f [s] 2 . 52 15 . 84 0 . 16 0 . 09 31 . 77 T ABLE I: Me dian values of the metric s comp uted out of the 27 executions by d ifferent u sers o f the peg-in- hole task u sing the locomo tion ap proach . ¯ E [J] ¯ F h [N] ¯ v [ m / s ] x f [m] T f [s] 0 . 78 9 . 39 0 . 11 0 . 28 37 . 49 T ABLE II: Med ian values of the metr ics c omputed out o f the 27 executions b y different users of the peg-in -hole task using the switch app roach. ¯ E [J] ¯ F h [N] ¯ v [ m / s ] x f [m] T f [s] 0 . 86 12 . 30 0 . 14 0 . 08 28 . 33 T ABLE III: Median values of the metrics compu ted out of the 27 executions b y different users of the peg-in -hole task using the min imum energy approa c h. cognitive load . Regarding the final end-effector displacement x f , the locomotio n and minimum- e n ergy ap p roaches ach iev e com- parable accu racy , with the latter perfor ming sligh tly better , as bo th explo it seco n dary tasks in th e Jacob ian null space for this p urpose. In the switch appro ach, instead, the final displacement d epends o n user’ s action du r ing man ip ulation, which may lea d to sub o ptimal con fig urations. Fig. 6 and Fig. 7 show th e norm k v ( kT ) k of th e end- effector velocity and the total stor e d k inetic en ergy E K ( k T ) in (1 0) du ring task execution for the user most f r equently associated with the median values in Fig. 5 an d T ables I, I I, and III. From Fig. 6, it can be o bserved that th e locomotio n approa c h exhibits mo re pron ounced velocity fluctuation s compare d to the o th er ap proach es, resulting in a jagged and less stable motion pro file. Since k v ( kT ) k is prop ortional to the momen tum, this ind icates more frequen t and abr upt movements, lead in g to redu c ed user co mfort and safety . At the same time, the switch appro ach sh ows si milarly high peaks when the loco motion mo de is activ ated, lower pe aks when m anipulation mode is activ ated, an d intervals o f zero velocity co rrespond ing to switching ph a ses or u ser de c ision intervals. The m in imum-en ergy app roach represents the best compro mise, as the u se of the mobile base is automatically limited to strictly nec e ssary movements in order to red u ce the kinetic energy stored in th e mobile base rep resenting the heaviest system compo nent, and there are n o finite in tervals of ze r o velocity correspon ding to switch ing o perations. Fig. 7 shows the time ev olu tio n of the total kinetic energy . In the lo c o motion approa ch, high en ergy peak s ar e observed due to large movements of the mobile base. I n the switch approa c h , the stored energy is low dur ing manip ulation (i.e., w h en th e m anipulator arm is u sed) an d increases significantly du r ing locom otion p hases (i.e., when the mobile base is used). Finally , the minimum -energy approac h exh ib its the smo othest pro file w ith lo wer p eak values, resulting in 0 5 10 15 20 25 30 35 40 45 0 0.2 0.4 0.6 0 5 10 15 20 25 30 35 40 45 0 0.2 0.4 0.6 0 5 10 15 20 25 30 35 40 45 0 0.2 0.4 0.6 Manipulation z }| { Locomotion z }| { Manipulation z }| { Locomotion z}|{ Manipulation z }| { Fig. 6: End -effector velocity dur ing th e execution of the task by the user mo st f requen tly associated with the med ian values in Fig. 5. reduced overall kinetic energy stored in th e who le-body system, thu s en hancing hum an safety during the inter action and giving a smo other user experienc e . V . C O N C L U S I O N S This pap er has addr essed the co ntrol of a mobile m a- nipulator f or h u man-ro bot in teraction app lications, with the objective of min imizing the overall k inetic en ergy stored in the whole - body mobile manipulator . The propo sed ap- proach is d escribed in detail an d expe r imentally validated on a peg-in- hole task. T h e obtained results d emonstrate th at the proposed min imum-en e rgy ap proach achie ves th e best overall per forman ce amon g the consid e r ed methods a c ross the selected metrics, thu s resulting in an enh anced physical human- robot in teraction. R E F E R E N C E S [1] A. D. Deshpande, “Editorial ov ervie w: Novel biomedic al technologie s: Rehabi litat ion robotics, ” Current Opinion in B iomedic al Engineering , vol. 22, p. 100371, 2022. [2] C. Lauretti, F . Cordella, E. Guglielmelli , and L. Zollo, “Learning by demonstrat ion for planning acti vities of daily li ving in rehabil itati on and assisti ve robotics, ” IE EE Robotics and Automatio n Letters , vol. 2, no. 3, pp. 1375–1382, 2017. [3] M. Selvag gio, G. A. Fonta nelli , F . Ficuciello , L. V illani, and B. Sicil- iano, “Pa ssi ve virtual fixtures adapt ation in minimally in va si ve robotic surgery , ” IEEE Robotics and Automati on Letters , vol. 3, no. 4, pp. 3129–3136, 2018. [4] A. Angleraud, A. Ekrekli, K. Samarawic krama, G. Sharma, and R. Pieters, “Sensor -based human–robot collabora tion for industrial tasks, ” R obotics and Computer -Inte grate d Manufacturing , vol. 86, p. 102663, 2024. [5] X. Y u, B. Li, W . He, Y . Feng, L. Cheng, and C. Silvestre, “ Adapti ve- constrai ned impedance control for human–robot co-transportat ion, ” IEEE T ransact ions on Cybernetics , vol . 52, no. 12, pp. 13 237–13 249, 2022. [6] G. Prakash, C. S. Maney , A. G, and P . P . H. S, “Human augmenta- tion with robotics, ” Internation al Journal of Innovativ e R esear ch in T echnolo gy , vol. 10, 2023. 0 5 10 15 20 25 30 35 40 45 0 10 20 0 5 10 15 20 25 30 35 40 45 0 10 20 0 5 10 15 20 25 30 35 40 45 0 10 20 Manipulation z }| { Locomotion z }| { Manipulation z }| { Locomotion z}|{ Manipulation z }| { Fig. 7: T o tal kinetic energy stor ed in the who le-body system during the execution of the task by the user mo st fr equently associated with th e med ian values in Fig. 5. [7] W . Kim, P . Balatti, E. Lamon, and A. Ajoudani, “Moca-man : A mobile and reconfigurable collaborati ve robot assistant for conjoined human- robot actions, ” in 2020 IEE E International Confere nce on Robotics and Automation (ICRA) , 2020, pp. 10 191–10 197. [8] J. M. Gandarias, P . Balatti , E. Lamon, M. Lorenzin i, and A. Ajoudani, “Enhanci ng flexibi lity and adaptabi lity in conjoi ned human-robot industria l tasks with a minimalist physical interf ace, ” in 2022 Inter - national Confere nce on Robotics and Automation (ICRA) , 2022, pp. 8061–8067. [9] J. Zhao, A. Giammarino, E. Lamon, J. M. Gandaria s, E. D. Momi, and A. Ajoudani, “ A hybrid learning and optimizati on framew ork to achie ve physically interact i ve tasks with mobile manipula tors, ” IEEE Robotics and Automati on Letters , vol. 7, no. 3, pp. 8036–8043, 2022. [10] A. Giammarino, J. M. Gandaria s, P . Balatti, M. Leonori, M. Lorenzini, and A. Ajoudani, “Super -man: Supernumera ry robotic bodie s for physical assistance in human–robot conjoined actions, ” Mechatr onics , vol. 103, p. 103240, 2024. [11] D. Sirintuna , T . Kastritsi, I. Ozdamar , J. M. Gandarias, and A. Ajoudani, “Enhancin g human–robot collaborati ve tra nsportat ion through obstacle-a ware vibrotact ile warn ing and virtual fixtures, ” Robotics and Autonomous Systems , vol. 178, p. 104725, 2024. [12] P . C. Santos, R. C. S. Freire, E . A. N. Carv alho, L. Molina, and E. O. Freire, “M-fa brik: A new in verse kinematics approach to mobile manipula tor robots based on fabrik, ” IE EE Access , vol. 8, pp. 208 836– 208 849, 2020. [13] A. Aristidou, J. Lasenby , and U. of Cambridge. Engineering De- partment , Inv erse kinemati cs: a rev iew of exist ing techni ques and intr oduction of a new fast iter ative solver , ser . CUED/F-INFENG/TR. Uni versity of Cambridge, Department of Engineering, 2009. [14] X. Zhang, G. L i, F . Xiao, D. Jiang, B. T ao, J . Kong, G. Jiang, and Y . Liu, “ An in verse kinematic s frame work of mobile manipulator based on unique domain constraint, ” Mechanism and Machi ne Theory , vol. 183, p. 105273, 2023. [15] J. Havi land, N. S ¨ underhau f, and P . Corke , “ A holisti c approach to reacti ve m obile manipulati on, ” IEEE Robotics and Automation Letter s , vol. 7, no. 2, pp. 3122–3129, 2022. [16] W . Li, P . L i, L. Jin, R. Xu, J. Guo, and J. W ang, “Complia nt-cont rol- based assisted wal king with mobile manipulat or , ” Biomimetics , vol. 9, no. 2, 2024. [17] O. Khatib, “ A unified approach for motion and force control of robot manipula tors: The operational space formulation, ” IEEE Jou rnal on Robotics and Automation , vol. 3, no. 1, pp. 43–53, 2003. [18] H. Goldstei n, C. P . Poole, J. Safko et al. , Cl assical mec hanics . Addison-wesle y Readin g, MA, 1950, vol. 2.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment