Integral Control Barrier Functions with Input Delay: Prediction, Feasibility, and Robustness
Time delays in feedback control loops can cause controllers to respond too late, and with excessively large corrective actions, leading to unsafe behavior (violation of state constraints) and controller infeasibility (violation of input constraints).…
Authors: Adam K. Kiss, Ersin Das, Tamas G. Molnar
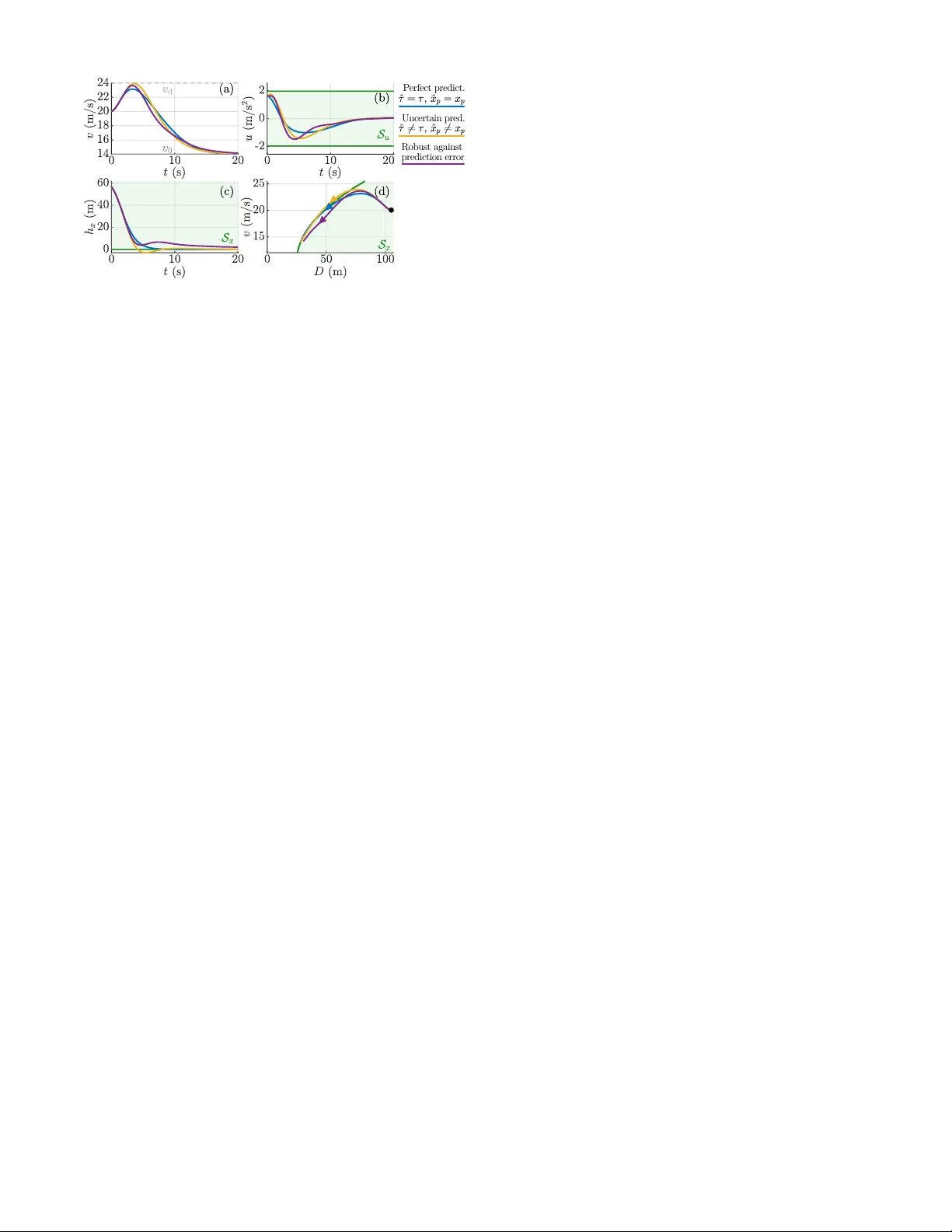
Integral Contr ol Barrier Functions with Input Delay: Pr ediction, F easibility , and Rob ustness Adam K. Kiss, Ersin Das ¸ , T amas G. Molnar , and Aaron D. Ames Abstract — Time delays in feedback control loops can cause controllers to respond too late, and with excessiv ely large correcti ve actions, leading to unsafe beha vior (violation of state constraints) and controller infeasibility (violation of input constraints). T o address this problem, we de velop a safety- critical control framework f or nonlinear systems with input delay using dynamically defined (integral) controllers. Building on the concept of Integral Control Barrier Functions (ICBFs), we concurrently address two fundamental challenges: compen- sating the effect of delays, while ensuring feasibility when state and input constraints are imposed jointly . T o this end, we embed predictor feedback into a dynamically defined control law to compensate for delays, with the predicted state ev olving according to delay-free dynamics. Then, utilizing ICBFs, we formulate a quadratic program f or safe control design. For systems subject to simultaneous state and input constraints, we derive a closed-form feasibility condition for the resulting controller , yielding a compatible ICBF pair that guarantees forward inv ariance under delay . W e also address robustness to prediction errors (e.g., caused by delay uncertainty) using tunable r obust ICBFs. Our appr oach is validated on an adapti ve cruise control example with actuation delay . I . I N T RO D U C T I O N Control Barrier Functions (CBFs) [1] provide a principled approach to safety-critical control by enabling the design of controllers that enforce the forward in v ariance of a safe set in the state space. This is typically implemented through safety filters, formulated as a quadratic program (QP) that minimally modifies a giv en nominal controller . This frame- work has been applied to autonomous vehicles, robotics, and multi-agent systems [2]–[5]. One of the ke y challenges in applying CBFs to real systems is input delay . Actuation, computation, and commu- nication all introduce delays that cause the commanded input to take ef fect only after some time. A controller unaware of this delay e v aluates the CBF condition at the current state, while the effect of the input will only be realized later—this mismatch can cause safety violations. Predictor feedback [6] addresses this problem by forward-integrating the system over the delay interval to obtain the predicted state at which the CBF condition is ev aluated [7], [8]. Adam K. Kiss is with the Department of Applied Mechanics, Faculty of Mechanical Engineering, Budapest Univ ersity of T echnology and Eco- nomics, Budapest, Hungary , kiss a@mm.bme.hu . Ersin Das ¸ is with the Department of Mechanical, Materials, and Aerospace Engineering, Illinois Institute of T echnology , Chicago, IL 60616, USA, edas2@illinoistech.edu . T amas G. Molnar is with the Department of Mechanical Engineering, W ichita State Univ ersity , Wichita, KS 67260, USA, tamas.molnar@wichita.edu . Aaron D. Ames is with the Department of Mechanical and Civil En- gineering, California Institute of T echnology , Pasadena, CA 91125, USA, ames@caltech.edu . In practice, ho we ver , the delay is often uncertain, which may induce a prediction error that acts as a disturbance. Robustness to this error can be achiev ed through integral quadratic constraints [9], [10], input-to-state safety [11], or robust CBFs [12], [13], while online delay estimation may further reduce conservatism [14]. The standard CBF frame work [1] considers state con- straints only , which limits its applicability when input con- straints (such as actuator bounds) or actuator dynamics are present. This is especially important for systems with delays, because a delayed response may become more ex- cessiv e with higher inputs. Integral Control Barrier Functions (ICBFs) [15] overcome input constraints by allo wing the barrier function to depend on both the system state and the control input, so that input constraints and actuator dynamics can be encoded alongside the state constraint [16]. ICBFs, howe ver , have not yet been adapted to time delay systems. Furthermore, ICBFs present another challenge. For mul- tiple constraints (both state and input limits), the combined QP may be infeasible even if each constraint individually admits a solution. This phenomenon is well-known for CBF- based safety filters [17]: when constraints are incompatible, the QP may hav e no solution, or undesired equilibria may appear on the safe set boundary [18]. The compatibility (or joint feasibility) of constraints has been studied for intersections of safe sets [19], [20] and for explicit safety filter formulations [21]. Deriving a closed-form feasibility condition for ICBF-based safety filters with joint state and input constraints is still missing from the literature. In this paper, we dev elop an ICBF framew ork for nonlinear control systems with input delay and joint state and input constraints. First, we incorporate predictor feedback into the ICBF frame work so that the safety filter operates on the predicted state, compensating for the delay . Second, we de- riv e a closed-form feasibility condition for the two-constraint QP arising from joint state and input limits, constituting a compatible ICBF pair that guarantees feasibility and forward in v ariance under delay . Third, we handle uncertain delay via a robust ICBF formulation based on [12], [13] that treats prediction errors as a disturbance, yielding safety guarantees that improv e with prediction accurac y . W e illustrate the framew ork on a safe adaptiv e cruise control example. The rest of the paper is organized as follo ws. Section II revisits the ICBF framework and the two-constraint setup. Section III presents the main results: the predictor -based ICBF formulation, the feasibility condition, and tunable ro- bustification. Section IV provides the adapti ve cruise control simulation. Section V closes with conclusions. I I . B A C K G RO U N D W e build on the framework of Control Barrier Functions (CBFs) [1], [2] and Integral CBFs [15]. W e consider a general, not necessarily control-affine, nonlinear system: ˙ x ( t ) = f ( x ( t ) , u ( t )) , (1) with continuously differentiable f : R n × R m → R n . Through- out the paper , we omit the explicit time dependence when it is clear from the context for simplicity . CBFs guarantee the forward in v ariance of the safe set C := { x ∈ R n : h ( x ) ≥ 0 } , where the CBF h : R n → R satisfies the condition sup u ∈ R m ∂ h ∂ x ( x ) f ( x , u ) + α ( h ( x )) ≥ 0 , ∀ x ∈ C , with an extended class- K function 1 α ∈ K e . ICBFs extend this construction to dynamically defined control laws. A. Inte gral Contr ol Barrier Functions W e revisit the ICBF framew ork [15] for system (1). Rather than an algebraic feedback controller u = k ( x ) , we consider a dynamically defined (integr al) controller : ˙ u ( t ) = ϕ ( x ( t ) , u ( t )) + v ( t ) , (2) where ϕ : R n × R m → R m is the continuously differentiable integral controller and v ∈ R m is an auxiliary correcti ve input to be determined by the safety filter . For example, with a nominal controller k d : R n → R m , a common choice is [15]: ϕ ( x , u ) = ∂ k d ∂ x ( x ) f ( x , u ) + α ϕ 2 ( k d ( x ) − u ) , (3) for α ϕ > 0 , which ensures that u approaches k d ( x ) expo- nentially along the trajectories of (1)–(2) with v ≡ 0 . W e define safety using a continuously dif ferentiable, input- dependent safety function h : R n × R m → R on the aug- mented state ( x , u ) . W e assume that zero is a regular value of h , and consider the associated safe set: S := { ( x , u ) ∈ R n × R m : h ( x , u ) ≥ 0 } . (4) Definition 1 ( [15]) . Function h : R n × R m → R is an Inte gr al Control Barrier Function for (1) with the controller (2) if there exists α ∈ K e such that for all ( x , u ) ∈ R n × R m : sup v ∈ R m h ˙ h ( x , u , v ) + α h ( x , u ) i ≥ 0 . (5) Let us define: b ( x , u ) := ∂ h ∂ u ( x , u ) ⊤ , (6) a ( x , u ) := − ∂ h ∂ x ( x , u ) f ( x , u ) − ∂ h ∂ u ( x , u ) ϕ ( x , u ) − α h ( x , u ) , so that ˙ h ( x , u , v ) + α h ( x , u ) = − a ( x , u ) + b ⊤ ( x , u ) v . Condition (5) is equiv alent to the point-wise requirement: b ( x , u ) = 0 = ⇒ a ( x , u ) ≤ 0 , ∀ ( x , u ) ∈ R n × R m . (7) 1 Function α : [0 , a ) → R , a > 0 , is of class- K ( α ∈ K ) if it is continu- ous, strictly increasing, and α (0) = 0 . Function α : ( − b, a ) → R , a, b > 0 is of extended class- K ( α ∈ K e ) if it has the same properties. Theorem 1 ( [15]) . If h is an ICBF for (1) with the contr oller (2) , then any locally Lipschitz contr oller v = q ( x , u ) , with q : R n × R m → R m , satisfying: b ⊤ ( x , u ) v ≥ a ( x , u ) (8) for all ( x , u ) ∈ S , r enders S forward in variant (safe), i.e., ( x (0) , u (0)) ∈ S = ⇒ ( x ( t ) , u ( t )) ∈ S , ∀ t ≥ 0 . A minimum-norm safety filter satisfying (8) is gi ven by q ( x , u ) = argmin v ∈ R m ∥ v ∥ 2 (9) s . t . b ⊤ ( x , u ) v ≥ a ( x , u ) . This QP admits the explicit solution q ( x , u ) = ( a ( x , u ) ∥ b ( x , u ) ∥ 2 b ( x , u ) , if a ( x , u ) > 0 , 0 , if a ( x , u ) ≤ 0 , (10) obtained via the Karush-Kuhn-T ucker (KKT) conditions. B. State and Input Constraints In practice, we often need to enforce two separate con- straints simultaneously: a state constraint and an input con- straint. Let the safe sets for the state and input be S x := { ( x , u ) ∈ R n × R m : h x ( x ) ≥ 0 } , (11) S u := { ( x , u ) ∈ R n × R m : h u ( u ) ≥ 0 } , (12) with continuously differentiable h x : R n → R , h u : R m → R . Since h x depends only on x , it cannot serve as an ICBF . Follo wing [15], we form the extended barrier: h e ( x , u ) := ∂ h x ∂ x ( x ) f ( x , u ) + α x ( h x ( x )) , (13) with α x ∈ K e and S e := { ( x , u ) ∈ R n × R m : h e ( x , u ) ≥ 0 } . (14) Making S e forward inv ariant via v guarantees the forward in v ariance of S e ∩ S x , enforcing state constraints. Let h e and h u be ICBFs. Applying (6) to h e and h u yields: b e ( x , u ) := ∂ h e ∂ u ( x , u ) ⊤ , (15) a e ( x , u ) := − ∂ h e ∂ x ( x , u ) f ( x , u ) − ∂ h e ∂ u ( x , u ) ϕ ( x , u ) − α e h e ( x , u ) , b u ( x , u ) := ∂ h u ∂ u ( u ) ⊤ , (16) a u ( x , u ) := − ∂ h u ∂ u ( u ) ϕ ( x , u ) − α u ( h u ( u )) . One may enforce both constraints on the safety correction v simultaneously , for example, by the QP: q ( x , u ) = argmin v ∈ R m ∥ v ∥ 2 (17) s . t . b ⊤ e ( x , u ) v ≥ a e ( x , u ) , b ⊤ u ( x , u ) v ≥ a u ( x , u ) . Even if each constraint individually admits a feasible v , the combined QP (17) may be infeasible when both are imposed simultaneously . This naturally raises the question: when is the two-constraint QP guaranteed to be feasible? W e address feasibility and forward in v ariance in Section III-B. I I I . I N T E G R A L C B F S W I T H I N P U T D E L A Y In this section, we present our main results: we extend the ICBF framew ork to systems with input delay . W e address joint state and input constraints, and robustness to uncertain prediction. The general case is stated first, while the cases of perfect prediction and no delay follow as special cases. Consider the system (1) with a constant input delay τ > 0 : ˙ x ( t ) = f x ( t ) , u ( t − τ ) . (18) W e assume (18) admits a unique solution x ( t ) for t ≥ 0 gi ven x (0) and a continuous input history u t ( ϑ ) := u ( t + ϑ ) , ϑ ∈ [ − τ , 0) . Due to the delay , the command u ( t ) computed at time t takes effect only at t + τ , and during [ t, t + τ ] the system ev olv es under the history u t , which cannot be altered retroacti vely . Evaluating the safety condition at x ( t ) is therefore inadequate for choosing u ( t ) . Instead, we require that the physical pair ( x ( t ) , u ( t − τ )) – the current state and the delayed input that is currently acting on the system – satisfies the safety constraint: h i x ( t ) , u ( t − τ ) ≥ 0 , (19) where h i may refer to a single constraint with h or each of the two constraints with h e and h u . W ith a slight abuse of notation, a barrier depending on a single variable is identified with its trivial extension to x , u . The delayed system must ev olve inside a safe set S i , so that ( x ( t ) , u ( t − τ )) ∈ S i , with S i := ( x , u ) ∈ R n × R m : h i ( x , u ) ≥ 0 . (20) W e require the following regularity condition for h i . Assumption 1. Any nonpositiv e number is a regular value of h i , that is, [ ∂ h i ∂ x ( x , u ) , ∂ h i ∂ u ( x , u )] = 0 for all ( x , u ) ∈ R n × R m satisfying h i ( x , u ) ≤ 0 . A. Pr edictor F eedback T o overcome the effect of delay , we employ predictor feed- back [7]. Assuming access to x ( t ) and the stored history u t , the predicted state x p ( t ) := x ( t + τ ) is obtained by forward- integrating (18) over the delay interv al: x p = Ψ( τ , x , u t ) := x + Z τ 0 f Ψ( s, x , u t ) , u t ( s − τ ) d s, (21) where u t ( s − τ ) is the known past input. A key property [6] is that x p has delay-free dynamics: ˙ x p ( t ) = f ( x p ( t ) , u ( t )) . The integral controller is designed with the predicted state: ˙ u ( t ) = ϕ ( x p ( t ) , u ( t )) + v ( t ) , (22) where ϕ is the integral controller and v = q ( x p , u ) is the auxiliary safety correction ev aluated with the predicted state. This controller is designed with two goals: ensuring that u tracks a desired nominal law through ϕ , and enforcing safety via v . Because ϕ acts on the predicted state x p rather than the current state x , delay compensation is embedded in the nominal dynamics. For instance, for a static state feedback law u = k d ( x ) , a common choice in the delay setting is: ϕ ( x p , u ) = ∂ k d ∂ x ( x p ) f ( x p , u ) + α ϕ 2 ( k d ( x p ) − u ) , (23) for α ϕ > 0 , making u con v erge to k d ( x p ) exponentially . Prediction requires the delay τ and the dynamics f to be accurately known. Howe v er , in practice, the exact delay and dynamics are seldom known, which may lead to a pr ediction err or : a mismatch between the true future state x p and its estimation ˆ x p . For example, if f is known but the controller uses a delay estimate ˆ τ , the estimated predicted state ˆ x p ( t ) := Ψ ˆ τ , x ( t ) , u t (24) differs from x p ( t ) = Ψ( τ , x ( t ) , u t ) whene ver ˆ τ = τ . While the physical system (18) is driven by the input u ( t − τ ) and its dynamics remain undisturbed, the predic- tion error ˆ x p − x p affects the integral control law in (22). Namely , both the controller ϕ and the safety correction q are e v aluated at the uncertain ˆ x p instead of the true x p : ˙ u ( t ) = ϕ ˆ x p ( t ) , u ( t ) + q ( ˆ x p ( t ) , u ( t )) . (25) The effect of the prediction mismatch can be viewed as a matched disturbance propagated into (22): ˙ u ( t ) = ϕ x p ( t ) , u ( t ) + q ( x p ( t ) , u ( t )) + d ( t ) , (26) d := ϕ ( ˆ x p , u ) + q ( ˆ x p , u ) − ϕ ( x p , u ) − q ( x p , u ) . (27) W e assume that the disturbance (i.e., the effect of prediction errors) stays bounded. Assumption 2. ∥ d ( t ) ∥ ≤ δ for all t ≥ 0 , for some δ ≥ 0 . Knowing a bound ∥ ˆ x p − x p ∥ ≤ δ x on the prediction error, the disturbance bound δ can be estimated, for example, as δ = ( L ϕ + L q ) δ x , where L ϕ and L q are the Lipschitz constants of ϕ and q , respectiv ely . Notice that when ˆ x p = x p (i.e., ˆ τ = τ ), we have d ≡ 0 and δ = 0 . T o provide robust safety ev en in the presence of distur- bance, we adopt the robust CBF framework of [12]. For each barrier h i , we enforce a robust ICBF condition b ⊤ i ( x p , u ) v ≥ a i ( x p , u ) + r i ( x p , u ) , (28) with the additional robustness term r i ( x p , u ) := µ i h i ( x p , u ) ∥ b i ( x p , u ) ∥ + σ i h i ( x p , u ) ∥ b i ( x p , u ) ∥ 2 , (29) where µ i , σ i : R → R > 0 are continuously differentiable and monotonously decreasing. A common choice is µ i ( h i ) = µ 0 e − λh i , σ i ( h i ) = σ 0 e − λh i with µ 0 , σ 0 , λ > 0 . Using the tunability idea of [22], with µ i and σ i we concen- trate robustness near the safe set boundary ( h i ≈ 0 ), while leaving the controller unchanged far inside the set ( h i ≫ 0 ). This finally leads to the following QP for ensuring robust safety in the presence of input delay and prediction errors: q ( x p , u ) = argmin v ∈ R m ∥ v ∥ 2 (30) s . t . b ⊤ i ( x p , u ) v ≥ a i ( x p , u ) + r i ( x p , u ) , where the constraint is enforced for all i ∈ { e, u } in case of two constraints (with h e , h u ), while the index i can be dropped for a single constraint (with h ). Next, we establish our main theoretical results underpinning this control design. B. F easibility First, we establish feasibility conditions for the proposed controller . In the case of a single constraint, we require that there exists α ∈ K e such that for all ( x p , u ) ∈ R n × R m : sup v ∈ R m h ˙ h ( x p , u , v ) + α h ( x p , u ) − r ( x p , u ) i ≥ 0 , (31) or equi v alently: b ( x p , u ) = 0 = ⇒ a ( x p , u ) ≤ 0 . (32) Note that r ( x p , u ) = 0 whenever b ( x p , u ) = 0 based on (29), hence (32) reduces to the standard ICBF condition (7). This implies that any ICBF is automatically a robust ICBF [12]. This condition is required for the feasibility of the single- constraint QP . For the two-constraint case, we deriv e the feasibility condition based on a form of Farkas’ lemma. Lemma 1 ( [19], [20]) . There e xists v ∈ R m satisfying two affine constraints, b ⊤ e v ≥ a e and b ⊤ u v ≥ a u , if and only if λ e b e + λ u b u = 0 = ⇒ λ e a e + λ u a u ≤ 0 , (33) for all λ e , λ u ≥ 0 . Applying Lemma 1 to the two-constraint QP yields the following easy-to-check condition. Proposition 1. The pair ( h e , h u ) is a compatible r ob ust ICBF pair and the QP in (30) is feasible if and only if b e = 0 = ⇒ a e ≤ 0 , (34a) b u = 0 = ⇒ a u ≤ 0 , (34b) ∥ b e ∥ ∥ b u ∥ + b ⊤ e b u = 0 = ⇒ (34c) ( a e + r e ) ∥ b u ∥ + ( a u + r u ) ∥ b e ∥ ≤ 0 , wher e all quantities ar e evaluated at ( x p , u ) . Pr oof. W e use Lemma 1, by replacing a i with a i + r i . W e show that (33) holds for all cases where λ e b e + λ u b u = 0 with λ e , λ u ≥ 0 . This means b e and b u are anti-parallel or zero (or λ e = λ u = 0 , for which (33) holds trivially). Case b e = 0 , b u = 0 : λ e b e + λ u b u = 0 holds if λ u = 0 , so (33) requires λ e ( a e + r e ) ≤ 0 for all λ e ≥ 0 , giving (34a). Case b e = 0 , b u = 0 is symmetric and giv es (34b). Case b e = 0 , b u = 0 is covered by (34a) and (34b). Anti-parallel case ( ∥ b e ∥ ∥ b u ∥ + b ⊤ e b u = 0 , while b e = 0 , b u = 0 ): W e have b e = − c b u with c = ∥ b e ∥ / ∥ b u ∥ > 0 . So λ e b e + λ u b u = 0 giv es λ u = cλ e , and (33) yields (34c). Conditions (34a)–(34b) coincide with the individual rob ust ICBF conditions (32) for h e and h u . Hence, they are satisfied when h e and h u are ICBFs. Ho wev er , two ICBFs need not form a compatible ICBF pair: condition (34c) may fail when b e and b u are anti-parallel. Furthermore, ev en if compati- bility holds without robustness terms, it may not hold with r e , r u > 0 : unlike the single-constraint case, a compatible ICBF pair is not automatically a compatible robust ICBF pair . Condition (34c) must therefore be explicitly verified or enforced through the design of ϕ . T uning ϕ directly shapes a e and a u and can be used to ensure compatibility . C. Rob ust Safety Having established feasibility , we now state the formal safety guarantees provided by the proposed controller . Since the input history over [0 , τ ] is already committed and cannot be altered by the safety filter , we require an assumption. Assumption 3. The initial input history satisfies ( x ( ϑ ) , u ( ϑ − τ )) ∈ S i for all ϑ ∈ [0 , τ ] . This requirement is stronger than ( x (0) , u (0)) ∈ S for the delay-free case: with delay , the safety filter has no authority ov er [0 , τ ] since the input history is already committed. Under Assumptions 1–3, we establish the safety of the time delay system (18) with the integral controller (25) in the presence of prediction errors. Specifically , we show that the set S i is forward in variant if the disturbance caused by prediction errors is small (i.e., δ ≤ µ i (0) ). Moreover , ev en if the disturbance is large (i.e., δ > µ i (0) ), we can show that trajectories remain within a neighborhood of the safe set by using the concept of input-to-state safety [23]. For each barrier h i , we define the inflated set S i,δ := ( x , u ) ∈ R n × R m : h i,δ ( x , u ) ≥ 0 , (35) where h i,δ ( x , u ) := h i ( x , u ) − α − 1 i − ( µ i (0) − δ ) 2 4 σ i ( h i ( x , u )) . (36) Note that the set S i,δ grows with δ (if δ > µ (0) ), while δ itself grows with the prediction error ˆ x p − x p . A more accu- rate prediction, therefore, directly reduces conservatism [11]. The following theorem establishes the forward in v ariance of S i and S i,δ for both the single- and two-constraint cases. Theorem 2. Consider the system (18) , the pr edicted state x p in (21) , its estimation ˆ x p , the safe set S i in (20) , and the inflated set S i,δ in (35) . Let Assumptions 1, 2, and 3 hold. If the condition in (32) holds, then any locally Lipschitz contr oller v = q ( x p , u ) , with q : R n × R m → R m , satisfying b ⊤ ( x p , u ) v ≥ a ( x p , u ) + r ( x p , u ) (37) for all ( x p , u ) ∈ S δ , r enders S δ forwar d in variant for (18) – (25) . Further , if δ ≤ µ (0) , then S is also forwar d invariant, i.e., ( x (0) , u ( − τ )) ∈ S = ⇒ ( x ( t ) , u ( t − τ )) ∈ S , ∀ t ≥ 0 . If the conditions in (34) hold, then any locally Lipschitz contr oller v = q ( x p , u ) , with q : R n × R m → R m , satisfying b ⊤ i ( x p , u ) v ≥ a i ( x p , u ) + r i ( x p , u ) , ∀ i ∈ { e, u } , (38) for all ( x p , u ) ∈ S e,δ ∩ S u,δ , render s S e,δ ∩ S u,δ forwar d in variant for (18) – (25) . Further , if δ ≤ min { µ e (0) , µ u (0) } , then S e ∩ S u is also forwar d in variant, i.e., ( x (0) , u ( − τ )) ∈ S e ∩ S u = ⇒ ( x ( t ) , u ( t − τ )) ∈ S e ∩ S u , ∀ t ≥ 0 . Pr oof. W e follow [7, Appendix], [22] and giv e the argument for a single barrier h ; the two-barrier case follo ws by applying the same reasoning to h e and h u . Shifting time by τ , the predicted pair ( x p , u ) obeys the delay-free dynamics ˙ x p ( t ) = f ( x p ( t ) , u ( t )) , with ˙ u = ϕ ( x p , u ) + q ( x p , u ) + d based on (25). W e prov e forward in v ariance using Nagumo’ s theorem. First, we compute ˙ h along the disturbed dynamics ˙ h x p , u , q ( x p , u ) + d = − α h ( x p , u ) − a ( x p , u ) + b ⊤ ( x p , u ) q ( x p , u ) + d . For ease of notation, we omit the argument of ˙ h and the arguments ( x p , u ) from now on. Substituting (37), we get ˙ h ≥ − α h + r + b ⊤ d . Then, we substitute r from (29), and we write b ⊤ d ≥ − ∥ b ∥ δ based on the Cauchy–Schwarz inequality and Assumption 2: ˙ h ≥ − α ( h ) + µ ( h ) − δ ∥ b ∥ + σ ( h ) ∥ b ∥ 2 . (39) Further , by completing the square, it can be shown that: ˙ h ≥ − α ( h ) + µ ( h ) − µ (0) ∥ b ∥ − ( µ (0) − δ ) 2 4 σ ( h ) . (40) W e prove the forward in variance of S by considering h = 0 . Substituting into (39) and using δ ≤ µ (0) : ˙ h ≥ µ (0) − δ ∥ b ∥ + σ (0) ∥ b ∥ 2 ≥ 0 . Since zero is a regular value of h based on Assumption 1, Nagumo’ s theorem yields forward in v ariance for S . Simi- larly , to sho w the inv ariance of S δ , we take h δ = 0 . This implies h ≤ 0 and α ( h ) + ( µ (0) − δ ) 2 4 σ ( h ) = 0 , thus (40) yields ˙ h ≥ µ ( h ) − µ (0) ∥ b ∥ ≥ 0 , where µ ( h ) ≥ µ (0) as µ is monotonously decreasing. Based on [22, proof of Thm. 3], ˙ h δ ≥ 0 ⇐ ⇒ ˙ h ≥ 0 , and zero is a regular value of h δ via Assumption 1. Hence, Nagumo’ s theorem yields forward inv ariance for S δ . These giv e safety for t ≥ τ , while Assumption 3 covers t ∈ [0 , τ ] . Remark 1 (Special Cases) . In case of accurate prediction ( ˆ x p = x p ), one could set r i ( x p , u ) = 0 , reducing (28) to the standard ICBF conditions e valuated at the predicted state x p : b ⊤ i ( x p , u ) v ≥ a i ( x p , u ) . (41) The corresponding minimum-norm safety filter is: q ( x p , u ) = argmin v ∈ R m ∥ v ∥ 2 (42) s . t . b ⊤ i ( x p , u ) v ≥ a i ( x p , u ) , cf. (30). Additionally , in case of zero delay ( τ = 0 ), we hav e x p = x , thus Assumption 3 holds automatically , and (41) reduces to the delay-free ICBF condition in Section II. I V . A D A P T I V E C R U I S E C O N T R O L W I T H D E L A Y W e illustrate the proposed frame work on an adapti v e cruise control (ACC) system [1]. Consider an automated vehicle (A V) following a lead vehicle. The A V’ s state, x = [ D v ] ⊤ , includes the distance to the lead vehicle, D , and the A V’ s speed, v . W ith actuation delay τ > 0 , the dynamics are ˙ D = v L − v, ˙ v = u ( t − τ ) − p ( v ) , (43) where v L is the lead vehicle’ s speed, u is the commanded ac- celeration, and p ( v ) = c 0 + c 1 v + c 2 v 2 is a resistance term. N o p r e d i c t o r Fig. 1. Simulation of A CC, showing the effect of input delay and predictor compensation: (a) velocity; (b) acceleration; (c) CBF h x ; (d) phase portrait. Blue: delay-free reference; yellow: naive controller unaware of input delay; purple: the proposed predictor feedback. T ABLE I. ACC simulation parameters. Parameter Symbol V alue Unit resistance c 0 6 . 06 × 10 − 5 m/s 2 c 1 3 . 03 × 10 − 3 s − 1 c 2 1 . 52 × 10 − 4 m − 1 vel. tracking gain K v 1 s − 1 integral control gain α ϕ 3 s − 1 R-CBF linear µ 0 ,e , µ 0 ,u 1 . 0 , 0 . 2 m/s 3 R-CBF quadratic σ 0 ,e , σ 0 ,u 0 . 1 , 0 . 05 m/s 4 ; s − 1 R-CBF decay λ 0 . 05 s/m Our goal is to control the A V such that it maintains a safe distance D while keeping the acceleration command u within safe bounds. W e use the proposed controller in (25) and (30) with the dynamically defined controller ϕ ( x p , u ) in (23) and the nominal controller k d ( x ) = K v ( v d − v ) , which driv es v towards a desired speed v d with gain K v . The safe following distance is encoded by the barrier h x ( x ) = D − T h v − ( v L − v ) 2 2 u max − D sf , (44) where T h is the time headw ay , u max is the maximum deceleration, and D sf is a safe standstill distance. This is used to construct the extended barrier h e in (13). The acceleration constraint | u | ≤ u max is captured by h u ( u ) = u 2 max − u 2 . (45) Feasibility of the QP (30) is analyzed via Proposition 1. Conditions (34a) and (34b) are the individual ICBF condi- tions for h e and h u separately . Condition (34c) is nontri vial and requires attention when b e and b u hav e opposite signs, which occurs during braking ( u < 0 , so b u = − 2 u > 0 ) when b e = − ( T h + ( v L − v ) /u max ) < 0 . In this regime, the condition (34c) must hold. W ithout the braking-distance term ( v L − v ) 2 / (2 u max ) in (44), b e = − T h would be constant and negati ve for all v , so opposite signs – and thus condition (34c) – would need to be checked throughout the entire braking phase with no guarantee of satisfaction. The quadratic term introduces a state-dependent contribution to b e (44) that reduces the region where condition (34c) is active, and encodes the physically correct stopping distance. The two simulation studies below use the ICBFs (44)– (45) and the QP (30). In the first case, we show the effect of the delay and the predictor x p = Ψ( τ , x , u t ) . In the second case, we highlight what happens when the delay P e r f e c t p r e d i c t . U n c e r t a i n p r e d . R o b u s t a g a i n s t p r e d i c t i o n e r r o r Fig. 2. Simulation of ACC, demonstrating robustness to prediction error (with 50% delay underestimation): (a) velocity; (b) acceleration; (c) CBF h x ; (d) phase portrait. Blue: perfect prediction; yello w: uncertain prediction and no robustification; purple: uncertain prediction with robustification. is uncertain, ˆ τ = τ , and the predictor ˆ x p = Ψ( ˆ τ , x , u t ) introduces a disturbance. The second case uses the robust margins (29) with µ i ( h i ) = µ 0 ,i e − λh i , σ i ( h i ) = σ 0 ,i e − λh i , while α i ( h ) = γ i h i is applied in the QP (30) in each case. The simulation parameters are u max = 1 . 96 m / s 2 , τ = 1 . 2 s , ˆ τ = 0 . 6 s , D (0) = 105 m , , v (0) = 20 m / s , v L ( t ) ≡ 14 m / s , v d = 24 m / s , γ x = γ e = γ u = 1 s − 1 , T h = 1 . 8 s , and D sf = 3 m ; while the remaining parameters are in T able I. Figure 1 sho ws the ef fect of input delay and predictor feedback. The delay-free case (blue) serves as reference with state and input constraints maintained throughout. W ith delay and without predictor (yellow), the ICBF filter is applied naiv ely at the current state x , unaware of the delay . This controller fails to anticipate the required braking and both constraints are violated. With predictor feedback (purple), the controller fully compensates the delay: the acceleration in panel (b) is a shifted copy of the delay-free case, while the velocity and barrier in panels (a) and (c) recov er the delay- free response. Thus safety is maintained per Theorem 2. Figure 2 shows the effect of delay uncertainty , when the delay is underestimated by 50% ( ˆ τ = τ / 2 ). W ith perfect prediction (blue, repeated from Fig. 1), safety is maintained exactly . With uncertain prediction and no robustification (yellow), the disturbance d causes the violation of the state constraint. As opposed, the proposed robust ICBF filter (pur- ple) intervenes proactiv ely and maintains both constraints during the simulation. V . C O N C L U S I O N This paper dev eloped an ICBF framew ork for the safety- critical control of nonlinear systems with input delay and joint state and input constraints. Three contributions were presented. First, predictor feedback was incorporated so that the safety filter compensates for the delay . Second, a closed- form feasibility condition was derived for the two-constraint QP arising from simultaneous state and input constraints. Third, a robust ICBF formulation was proposed to address prediction errors caused by , for example, delay uncertainty . The framework was v alidated on an adaptive cruise control example, where delay compensation and robustness to a 50% delay estimation error were demonstrated in simulation. Future research directions include experimental validation on embedded platforms with online delay estimation. R E F E R E N C E S [1] A. D. Ames, X. Xu, J. W . Grizzle, and P . T ab uada, “Control barrier function based quadratic programs for safety critical systems, ” IEEE T ransactions on Automatic Contr ol , vol. 62, no. 8, pp. 3861–3876, 2017. [2] A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P . T abuada, “Control barrier functions: Theory and applications, ” in European Contr ol Conference , 2019, pp. 3420–3431. [3] Y . Jiang, C. W ang, B. Li, L. Song, and X. Guan, “ A robust safety– critical control framework for control affine systems with applications to A UVs, ” IEEE/ASME T ransactions on Mechatr onics , vol. 30, no. 3, pp. 2005–2016, 2024. [4] Y . Xiong, D.-H. Zhai, and Y . Xia, “Robust whole-body safety-critical control for sampled-data robotic manipulators via control barrier func- tions, ” IEEE T ransactions on Automation Science and Engineering , 2025. [5] M. Harms, M. Jacquet, and K. Alexis, “Safe quadrotor navigation using composite control barrier functions, ” in IEEE International Confer ence on Robotics and Automation , 2025, pp. 6343–6349. [6] M. Krstic, Delay Compensation for Nonlinear , Adaptive, and PDE Systems . Birkh ¨ auser , 2009. [7] T . G. Molnar, A. K. Kiss, A. D. Ames, and G. Orosz, “Safety-critical control with input delay in dynamic environment, ” IEEE T ransactions on Contr ol Systems T echnology , vol. 31, no. 4, pp. 1507–1520, 2023. [8] I. Abel, M. Jankovi ´ c, and M. Krsti ´ c, “Constrained control of multi- input systems with distinct input delays, ” International Journal of Robust and Nonlinear Control , vol. 34, no. 10, pp. 6659–6682, 2024. [9] P . Seiler, M. Janko vic, and E. Hellstrom, “Control barrier functions with unmodeled input dynamics using integral quadratic constraints, ” IEEE Control Systems Letters , vol. 6, pp. 1664–1669, 2021. [10] Y . S. Quan, J. S. Kim, S.-H. Lee, and C. C. Chung, “Tube-based control barrier function with integral quadratic constraints for unknown input delay , ” IEEE Control Syst. Lett , vol. 7, pp. 1730–1735, 2023. [11] T . G. Molnar, A. Alan, A. K. Kiss, A. D. Ames, and G. Orosz, “Input- to-state safety with input delay in longitudinal vehicle control, ” IF AC- P apersOnLine , vol. 55, no. 36, pp. 312–317, 2022. [12] R. Nanayakkara, A. D. Ames, and P . T abuada, “Safety under state uncertainty: Robustifying control barrier functions, ” arXiv preprint arXiv:2508.17226 , 2025. [13] E. Das ¸, R. Nanayakkara, X. T an, R. M. Bena, J. W . Burdick, P . T abuada, and A. D. Ames, “Safe na vigation under state uncertainty: Online adaptation for robust control barrier functions, ” IEEE Robotics and Automation Letters , 2026. [14] Y . Kim, E. Das ¸, J. Kim, A. D. Ames, J. W . Burdick, and C. Sloth, “Minimizing conservatism in safety-critical control for input-delayed systems via adaptiv e delay estimation, ” in European Control Confer- ence , 2025, pp. 2102–2107. [15] A. D. Ames, G. Notomista, Y . W ardi, and M. Egerstedt, “Integral control barrier functions for dynamically defined control laws, ” IEEE Contr ol Systems Letters , vol. 5, no. 3, pp. 887–892, 2020. [16] E. Das ¸ , A. D. Ames, and J. W . Burdick, “Rollover prev ention for mobile robots with control barrier functions: Differentiator -based adaptation and projection-to-state safety , ” IEEE Contr ol Systems Let- ters , vol. 8, pp. 1727–1732, 2024. [17] S. S. Mousavi, X. T an, and A. D. Ames, “From vertices to con ve x hulls: Certifying set-wise compatibility for CBF constraints, ” IEEE Contr ol Systems Letters , vol. 9, pp. 3011–3016, 2025. [18] X. T an and D. V . Dimarogonas, “On the undesired equilibria induced by control barrier function based quadratic programs, ” Automatica , vol. 159, p. 111359, 2024. [19] T . G. Molnar and A. D. Ames, “Composing control barrier functions for complex safety specifications, ” IEEE Control Systems Letters , vol. 7, pp. 3615–3620, 2023. [20] M. H. Cohen, E. Lavretsk y , and A. D. Ames, “Compatibility of multiple control barrier functions for constrained nonlinear systems, ” in 64th IEEE Confer ence on Decision and Contr ol , 2025, pp. 771–778. [21] P . Mestres, S. S. Mousavi, P . Ong, L. Y ang, E. Das ¸, J. W . Burdick, and A. D. Ames, “Explicit control barrier function-based safety filters and their resource-aware computation, ” arXiv pr eprint:2512.10118 , 2025. [22] A. Alan, A. J. T aylor , C. R. He, G. Orosz, and A. D. Ames, “Safe controller synthesis with tunable input-to-state safe control barrier functions, ” IEEE Control Systems Letters , vol. 6, pp. 908–913, 2022. [23] S. K olathaya and A. D. Ames, “Input-to-state safety with control barrier functions, ” IEEE Control Systems Letters , vol. 3, no. 1, pp. 108–113, 2019.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment