Robust Taylor-Lagrange Control for Safety-Critical Systems
Solving safety-critical control problem has widely adopted the Control Barrier Function (CBF) method. However, the existence of a CBF is only a sufficient condition for system safety. The recently proposed Taylor-Lagrange Control (TLC) method address…
Authors: Wei Xiao, Christos Cass, ras
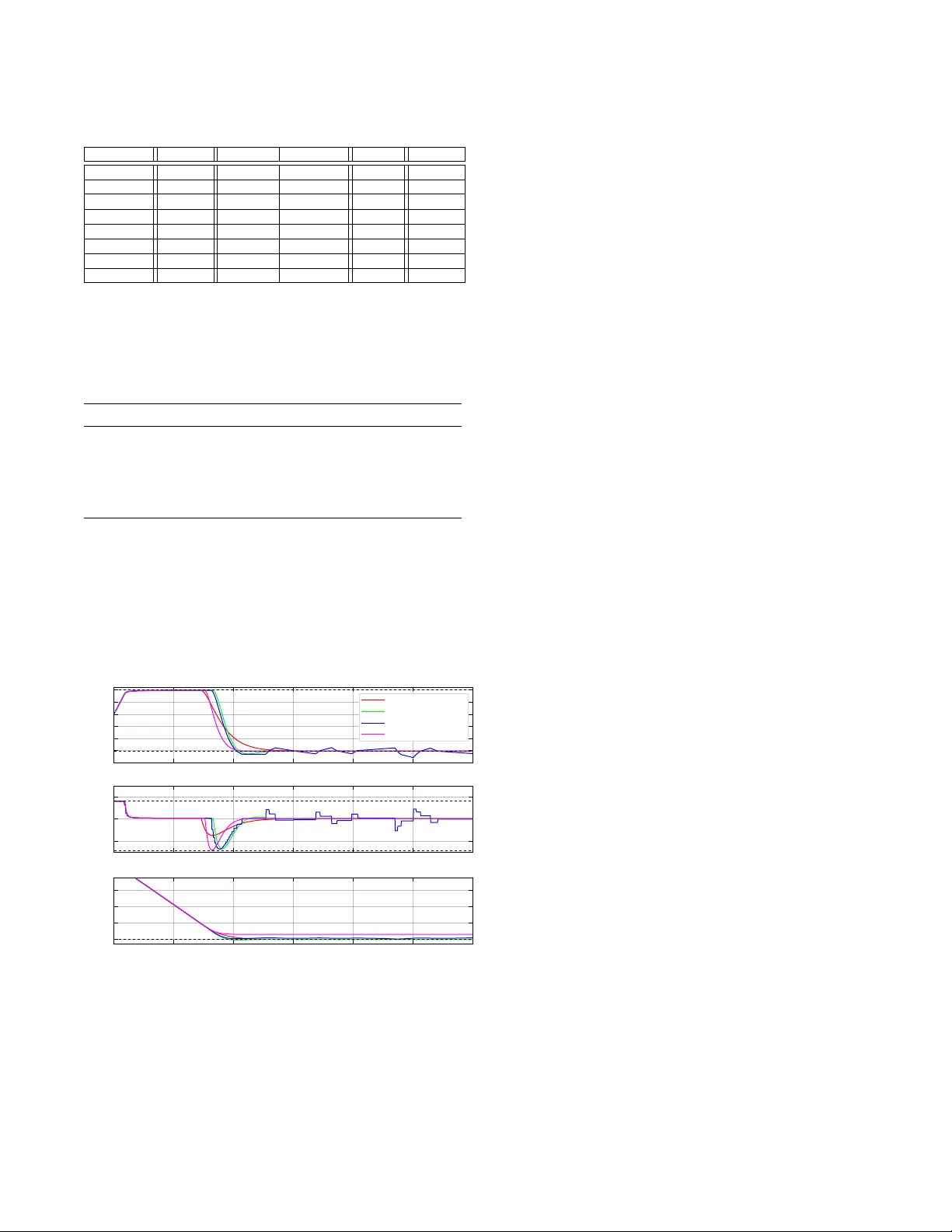
Rob ust T aylor -Lagrange Contr ol f or Safety-Critical Systems W ei Xiao, Christos Cassandras and Anni Li Abstract — Solving safety-critical control pr oblem has widely adopted the Control Barrier Function (CBF) method. However , the existence of a CBF is only a sufficient condition f or system safety . The recently pr oposed T aylor-Lagrange Contr ol (TLC) method addr esses this limitation, but is vulnerable to the feasibility preser vation problem (e.g ., inter -sampling effect). In this paper , we propose a r obust TLC (rTLC) method to address the feasibility preserv ation problem. Specifically , the rTLC method expands the safety function at an order higher than the relativ e degree of the function using T aylor’ s expansion with Lagrange remainder , which allows the control to explicitly show up at the curr ent time instead of the future time in the TLC method. The rTLC method naturally addresses the feasibility pr eservation problem with only one hyper -parameter (the discretization time interval size during implementation), which is much less than its counterparts. Finally , we illustrate the effectiveness of the proposed rTLC method through an adaptive cruise control problem, and compare it with existing safety-critical contr ol methods. I . I N T RO D U C T I O N Stabilizing dynamical systems while optimizing costs and satisfying (nonlinear) safety constraints has receiv ed increas- ing attention in recent years with rising autonomy . Existing methods like optimal control [1] [2] and dynamic program- ming [3] [4] are primarily designed for linear systems and constraints, limiting their extensions to nonlinear systems. Model Predictive Control (MPC) methods [5] [6] ha ve been applied to receding horizon safety-critical control, but they are generally computationally heavy , especially for nonlinear systems. Although linearization is possible to improve MPC computational efficienc y , such approximations may compro- mise safety guarantees. Reachability analysis [7] [8] is also widely used to verify system safety , b ut it incurs e xtensiv e computation load. In order to address the computational challenge, barrier-based methods have recei ved increasing attention for nonlinear systems. Barrier functions (BFs) are originally used in optimiza- tions with inequality constraints [9] by taking their reciprocal form as part of the cost function, and they are also used in machine learning systems to impro ve safety , such as in safe reinforcement learning [10]. Howe ver , this method cannot guarantee system safety as the safety constraint is taken as part of the cost function or rew ard, and thus its functionality W . Xiao is with the Robotics Engineering Department at W orces- ter Polytechnic Institute and MIT CSAIL, USA wxiao3@wpi.edu, weixy@mit.edu A. Li is with the Electrical and Computer Engineering Department at The Univ ersity of North Carolina at Charlotte, Charlotte, NC, 28223, USA ali20@charlotte.edu C. Cassandras is with the division of Systems Engineering at Boston Univ ersity , USA cgc@bu.edu is similar to a soft constraint. BFs are also used as L yapunov- like functions [11], and they hav e been employed in system verification and control [12][13][14][15]. Control BFs (CBFs) are the use of BFs for control (af fine) systems. CBFs can trace back to the Nagumo’ s theorem [16], and it sho ws that if the safety function is initially non- negati ve and its deriv ative is always non-negati ve at the safe set boundary , then the safety function remains non-negativ e for all times. In other words, the safety can be preserved. For safe control synthesis with CBFs, class K functions are considered in reciprocal CBFs [17] and zeroing CBFs [18] [19] to allo w the safety function to decrease when system state is far away from the boundary . Both CBF forms are fundamentally the same, and they are conserv ative due to the introduction of class K functions. In other words, the existence of a CBF is only a suf ficient condition for system safety . There are dif ferent v ariations for CBFs. Stochastic CBFs [20] hav e been proposed for stochastic systems, and finite-time con vergence CBFs [21] are for systems that ini- tially violate the safety constraint. Adaptiv e CBFs [22] [23] are also introduced to deal with system uncertainty and noise. T o ensure safety for systems and constraints with high rela- tiv e degree, e xponential CBFs (ECBFs) [24] and high-order CBFs (HOCBFs) [19] are proposed. Howe ver , the existence of ECBFs or HOCBFs implies the forward in variance of the intersection of a set of safe sets, which is very restrictive and may potentially limit system performance. The CBF method also introduces additional hyper -parameters, such as those in class K functions, that are non-trivial or dif ficult to tune. The recently proposed T aylor-Lagrange Control (TLC) method [25] ensures system safety using T aylor’ s theorem with Lagrange remainder [26] [27], and the TLC method has been sho wn to be a necessary and suf ficient condition for system safety with much less hyper-parameters (only one) than the CBF method. Howe ver , the TLC method is vulnerable to the feasibility preserv ation problem, such as the notorious inter-sampling ef fect that specifies the constraint satisfaction in continuous time for sampled-data systems. Although we may emplo y e vent-triggered methods [28] [29] to address the inter-sampling effect, these methods may introduce additional hyper-parameters that are non-trivial to tune by hand. In this paper , we propose a rob ust T aylor -Lagrange Control (rTLC) method for system safety using the T aylor’ s theorem with Lagrange remainder . The TLC method expands a safety function at an order higher than the relati ve degree of the safety function. This allows the control to show up at the current time in stead of the future time in T aylor’ s expansion. W e quantify the bound of the Lagrange remainder in rTLC using a reachable set analysis or the task space set, which eliminates the calculation of the future time state, control, and the deriv ativ e of control in a rTLC. As a results, the proposed rTLC has been sho wn to naturally address the feasibility preservation problem without additional consid- erations. Moreov er , the rTLC method has only one hyper- parameter , and is much less than existing methods like event- triggered approaches. The contributions of this paper are as follo ws: 1) W e propose a robust T aylor-Lagrange Control (rTLC) method for system safety , and demonstrate its depen- dence only on the current time instead of the future time in T aylor’ s expansion. 2) W e sho w that the proposed rTLC method naturally ad- dresses the feasibility preserv ation problem with only one hyper-parameter (the discretization time interval size during implementation), and thus guaranteeing system safety without additional parameter tuning. 3) W e verify the effecti veness of the proposed rTLC method on an adaptiv e cruise control problem, and compare it with existing safety-critical control meth- ods. The remainder of the paper is organized as follows. In Section II, we pro vide preliminaries on the TLC method and briefly discuss its connection with CBFs and HOCBFs. W e propose the rTLC method for nonlinear systems control systems in Section III with a subsection on ho w to solv e optimal control problems using the proposed rTLC. The case studies and simulation results are sho wn in Section IV. W e conclude with final remarks and directions for future work in Section V. I I . P R E L I M I NA R I E S In this section, we introduce the background on the T aylor - Lagrange Control (TLC), and briefly discuss its connection with CBFs. Consider an affine control system ˙ x = f ( x ) + g ( x ) u , (1) where x ∈ X ∈ R n ( X is a compact set), f is as defined abov e, g : R n → R n × q is locally Lipschitz, and u ∈ U ⊂ R q where U denotes a compact control constraint set: U = { u ∈ R q : u min ≤ u ≤ u max } , (2) where u min ∈ R q , u max ∈ R q , and the above constraint is interpreted component-wise. Solutions x ( t ) of (1), starting at x (0) , t ≥ 0 , are forward complete. Definition 1: (Class K function [30]) A function α : [0 , a ) → [0 , ∞ ) , a > 0 is said to belong to class K if it is strictly increasing and passes the origin. Definition 2: (Forward in variance [17]) A set C is for- ward in variant for (1) if its solution x ( t ) ∈ C, ∀ t ≥ 0 for any x (0) ∈ C . Definition 3: (Relativ e degree [30]) The relativ e degree of a function h ( x ) (or a constraint h ( x ) ≥ 0 ) w .r .t. (1) is defined as the minimum number of times we need to dif ferentiate h ( x ) along system (1) until any control component of u explicitly sho ws up in the corresponding deriv ativ e. For a safety constraint h ( x ) ≥ 0 that has relativ e degree m w .r .t system (1), h : R n → R , we can define a safe set C based on h : C := { x ∈ R n : h ( x ) ≥ 0 } , (3) where h ( x ) = 0 at the boundary of C and h ( x ) < 0 outside C . Then we hav e the following definition for a T aylor- Lagrange Control (TLC) function: Definition 4 (T aylor-La grang e Contr ol [25]): The func- tion h : R n → R is a T aylor-Lagrange Control (TLC) function of relativ e degree m for system (1) if sup u ( ξ ) ∈ U " m − 1 X k =0 L k f h ( x ( t 0 )) k ! ( t − t 0 ) k + L m f h ( x ( ξ )) m ! ( t − t 0 ) m + L g L m − 1 f h ( x ( ξ )) u ( ξ ) m ! ( t − t 0 ) m # ≥ 0 , t 0 ∈ [0 , ∞ ) , ξ ∈ ( t 0 , t ) , (4) for all x ( t 0 ) ∈ C , where L f h, L g h denote the Lie deri vati ve of h along f and g , respecti vely . The TLC exhibits connection with CBFs [17]. In other words, when h ( x ) has relati ve degree m = 1 , then the TLC constraint in (4) de generates to a CBF with a linear class K function: L f h ( x ( ξ )) + L g h ( x ( ξ )) u ( ξ ) + 1 t − t 0 h ( x ( t 0 )) ≥ 0 . (5) where ξ = t 0 in the zero-order hold discretization implemen- tation and t is the next time instant for the discretization. The TLC also extends HOCBFs [19] to the complex domain (i.e., the class K functions in HOCBFs are complex functions) for high relativ e de gree constraints. Moreover , the existence of a TLC is a necessary and suf ficient condition for the safety of the system [25], while the existence of a CBF is only sufficient. Theorem 1 ([25]): Gi ven a TLC function h ( x ) from Def. 4 with the associated safe set defined as in (3), if h ( x ( t 0 )) ≥ 0 , then any Lipschitz continuous controller u ( ξ ) ∈ K tlc ( x ( t 0 ) , x ( ξ )) , ∀ t 0 ∈ [0 , ∞ ) , ξ ∈ ( t 0 , t ) , t > t 0 renders the set C forward in variant for system (1). The TLC can be used for enforcing both the system safety and stability [25]. W e may first discretize the time, and then employ zero-order hold implementation within each time interval. W e take t 0 as the current time instant, and define t = t 1 in Def. 4, where t 1 is the next implementation time instant. This allows us to transform the original nonlinear constrained control problems into a sequence of quadratic programs. The inter-sampling effect of the TLC can be addressed by ev ent-triggered methods [25]. Howe ver , ev ent- triggered methods may hav e too many hyperparameters that are hard to tune. In this work, we address the inter -sampling effect using the proposed robust TLC method that has few hyperparameters. I I I . R O B U S T T AY L O R - L AG R A N G E C O N T RO L In this section, we propose the robust T aylor-Lagrange Control (rTLC) for obtaining state-feedback safe control policies for nonlinear control systems while addressing the inter-sampling ef fect. W e also discuss ho w to solv e con- strained optimal control problems using the proposed rTLC. As the feasibility preservation problem is mainly determined by the inter-sampling effect, we refer to the inter-sampling effect in the remainder of this work. A. Robust T aylor-Lagr ange Contr ol Suppose the relativ e degree of the safety constraint h ( x ) ≥ 0 is m with respect to (1), and the function h ( x ) is m + 1 times differentiable. Giv en a TLC as in Def. 4, we notice that the control explicitly sho ws up in L g L m − 1 f h ( x ( ξ )) u ( ξ ) m ! ( t − t 0 ) m , where ξ ∈ ( t 0 , t ) is hard to determine. Note that the u ( ξ ) is the control at the time ξ instead of the current time t 0 , which makes it hard to find a control polic y for the current time t 0 . Although we can employ zero-order implementation such that t = t 1 ( t 1 denotes the next implementation time instant) and u ( t 0 ) = u ( ξ ) , this may introduce some errors. W e may further employ event-triggered methods to address the inter- sampling effect due to the zero-order hold error , there are usually too many hyper -parameters that are hard to tune. Higher -order TLC. Let ∆ t = t − t 0 . In order to a void the abov e issue, we propose to e xpand the function h ( x ) at an order of m + 1 instead of m in the T aylor’ s theorem: m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ≥ 0 , t 0 ∈ [0 , ∞ ) , ξ ∈ ( t 0 , t ) , (6) where the Lagrange remainder is defined as R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) = L m +1 f h ( x ( ξ )) ( m + 1)! ∆ t m +1 + L g L m f h ( x ( ξ )) u ( ξ ) + L f L g L m − 1 f h ( x ( ξ )) u ( ξ ) ( m + 1)! ∆ t m +1 + L 2 g L m − 1 f h ( x ( ξ )) u ( ξ ) + L g L m − 1 f h ( x ( ξ )) ˙ u ( ξ ) ( m + 1)! ∆ t m +1 (7) In (7), the h ( x ) is m + 1 times differentiable, and x ∈ X, u ∈ U , where X , U are compact sets. In order to ensure that R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) , we need to check whether ˙ u ( ξ ) is bounded. Boundedness of ˙ u ( ξ ) . The control set U is defined as in (2). W e need to ensure that u ∈ U when ˙ u is introduced. Let u = ( u 1 . . . . , u q ) , u min = ( u 1 ,min , . . . , u q ,min ) , u max = ( u 1 ,max , . . . , u q ,max ) , where u i,min ∈ R , u i,max ∈ R , ∀ i ∈ { 1 , . . . , q } . In order to ensure u ∈ U with ˙ u , we introduce two 1st order TLC for each i ∈ { 1 , . . . , q } : h i, 1 ( u ( ξ )) = u i,max − u i , h i, 2 ( u ( ξ )) = u i − u i,min , (8) In order to make the two functions in the abov e become TLCs, the following constraints have to be satisfied: L f h i, 1 ( u i ( ξ )) + L g h i, 1 ( u i ( ξ )) ˙ u i ( ξ ) + 1 ∆ t h i, 1 ( u i ( ξ )) ≥ 0 , L f h i, 2 ( u i ( ξ )) + L g h i, 2 ( u i ( ξ )) ˙ u i ( ξ ) + 1 ∆ t h i, 2 ( u i ( ξ )) ≥ 0 , (9) Combining the last two equations, we have that ˙ u i ( ξ ) is bounded by: − 1 ∆ t ( u i ( ξ ) − u i,min ) ≤ ˙ u i ( ξ ) ≤ 1 ∆ t ( u i,max − u i ( ξ )) . (10) The abov e equation can be rewritten as − 1 ∆ t ( u ( ξ ) − u min ) ≤ ˙ u ( ξ ) ≤ 1 ∆ t ( u max − u ( ξ )) . (11) Boundedness of R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) . Since ˙ u ( ξ ) is bounded as sho wn in (11), we have that R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) is also bounded. Let S R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) denote the reachable set of R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) within the time interval ( t 0 , t ) , where ξ ∈ ( t 0 , t ) . Then we can find the minimum value R min of R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) by: R min = min ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ∈ S R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) . (12) Since h ( x ) is m + 1 times dif ferentiable, u ∈ U, x ∈ X , where U, X are compact sets, and ˙ u is also bounded as in (11), we hav e that R min must exist. Let U ˙ u be defined by: U ˙ u := { ˙ u ( ξ ) ∈ R q : − 1 ∆ t ( u ( ξ ) − u min ) ≤ ˙ u ( ξ ) ≤ 1 ∆ t ( u max − u ( ξ )) . } (13) Since u ( ξ ) ∈ U , we hav e that U ˙ u is a subset of U ˙ u,sup := { ˙ u ( ξ ) ∈ R q : − 1 ∆ t ( u max − u min ) ≤ ˙ u ( ξ ) ≤ 1 ∆ t ( u max − u min . } (14) Finally , we have that R min in (12) is lower bounded by: R min ≥ min ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ∈ ( X ,U ,U ˙ u,sup ) R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) . (15) The right-hand side of the above equation can always be obtained as we do not e xplicitly need to calculate the reach- able set S R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) . Deri ving a tight reachable set for S R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) could significantly reduce the conservati veness of our proposed robust TLC method, and thus is worth a future study . Now , we are ready to define the robust TLC: Definition 5 (Robust T aylor-Lagr ange Contr ol): Let R min be defined as in (12). The function h : R n → R is a Robust T aylor-Lagrange Control (rTLC) function of relativ e degree m for system (1) if sup u ( t 0 ) ∈ U " m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R min # ≥ 0 , (16) for t 0 ∈ [0 , ∞ ) , and for all x ( t 0 ) ∈ C . Note the difference between the rTLC in Def. 5 and the the TLC as in Def. 4 lies in that there is no ξ ∈ ( t 0 , t ) in Def. 5, and thus we can directly make the constraint be defined o ver u ( t 0 ) instead of u ( ξ ) . Moreover , (16) only depends on x ( t 0 ) without dependence on x ( ξ ) . This property significantly facilitates the implementation of the rTLC method. Giv en a rTLC as in Def. 5, we can define a state feedback controller that satisfies (16): K rtl c ( x ( t 0 )) = { u ( t 0 ) ∈ U : m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + R min + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m ≥ 0 } . (17) Theorem 2: Gi ven a rTLC function h ( x ) from Def. 5 with the associated safe set defined as in (3), if h ( x ( t 0 )) ≥ 0 , then any Lipschitz continuous controller u ( t 0 ) ∈ K rtl c ( x ( t 0 )) ensures h ( x ( t ′ )) ≥ 0 ∀ t ′ ∈ [ t 0 , t ] . Moreov er , if u ( t 0 ) ∈ K rtl c ( x ( t 0 )) for all t 0 ∈ [0 , ∞ ) , then the set C is forward in variant for system (1). Pr oof: By (12), we have that m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ≥ m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + R min + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m , t 0 ∈ [0 , ∞ ) , ξ ∈ ( t 0 , t ) , (18) Since u ( t 0 ) ∈ K rtl c ( x ( t 0 )) , we hav e that m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ≥ 0 , t 0 ∈ [0 , ∞ ) , ξ ∈ ( t 0 , t ) , (19) As the left side of the above constraint is the T aylor’ s expansion of h ( x ( t )) with Lagrange remainder , we ha ve that h ( x ( t )) ≥ 0 . (20) Now , let us consider any t ′ ∈ ( t 0 , t ) . W e expand h ( x ( t ′ )) similarly as the one of h ( x ( t )) using the T aylor’ s expansion with Lagrange remainder , we can get: h ( x ( t ′ )) = m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R ( x ( ξ ′ ) , u ( ξ ′ ) , ˙ u ( ξ ′ )) , t 0 ∈ [0 , ∞ ) , ξ ′ ∈ ( t 0 , t ′ ) , (21) Since t ′ ∈ ( t 0 , t ) and ξ ∈ ( t 0 , t ′ ) , we hav e that R ( x ( ξ ′ ) , u ( ξ ′ ) , ˙ u ( ξ ′ )) ≥ R min , (22) By (16) and the last equation, we hav e that h ( x ( t ′ )) = m − 1 X k =0 L k f h ( x ( t 0 )) k ! ∆ t k + L m f h ( x ( t 0 )) m ! ∆ t m + L g L m − 1 f h ( x ( t 0 )) u ( t 0 ) m ! ∆ t m + R ( x ( ξ ′ ) , u ( ξ ′ ) , ˙ u ( ξ ′ )) ≥ 0 , t 0 ∈ [0 , ∞ ) , ξ ′ ∈ ( t 0 , t ′ ) , (23) Since h ( x ( t 0 )) ≥ 0 , therefore, we conclude that h ( x ( t ′ )) ≥ 0 , ∀ t ′ ∈ [ t 0 , t ] . When we move t 0 within [0 , ∞ ) , we can ensure that h ( x ( t )) ≥ 0 , ∀ t ∈ [ t 0 , ∞ ) . Thus, the set C is forward in variant for system (1). ■ Remark 1 (rTLC addresses the inter-sampling effect): As shown in the proof of Thm. 2, any controller u ( t 0 ) that satisfies the rTLC constraint in (16) ensures h ( x ( t ′ )) ≥ 0 for all t ′ ∈ [ t 0 , t ] . Therefore, the controller u ( t 0 ) obtained at the current state x ( t 0 ) can naturally address the inter- sampling ef fect. In (16), the only parameter we need to consider is ∆ t , which is much less than other approaches (like ev ent-triggered methods [28] [29]) that address the inter-sampling effect. B. Optimal Contr ol with rTLC Consider a constrained optimal control problem for system (1) with the cost defined as: J ( u ( t )) = Z T 0 C ( || u ( t ) || ) dt (24) where || · || denotes the 2-norm of a vector . T denotes the final time, and C ( · ) is a strictly increasing function of its argument (such as the energy consumption function C ( || u ( t ) || ) = || u ( t ) || 2 ). W e also wish the state x of system (1) to reach a desired state x d ∈ R n at the final time T . Mathematically , we wish to achiev e the following: min u || x ( T ) − x d || . (25) Assume a safety constraint h ( x ) ≥ 0 , (26) with relati ve degree m that has to be satisfied by system (1). Formally , we have the follo wing constrained optimal con- trol problems: Problem 1: Our objective is to find a controller u ∗ for (1) by solving the following optimization: u ∗ = arg min u ∈ U Z T 0 C ( || u ( t ) || ) dt + w || x ( T ) − x d || , s.t. (26), (27) where w > 0 . W e may consider multiple safety constraints in the abo ve by simply adding more constraints in the above. Appr oach: W e use a rTLC to enforce the satisfaction of the safety constraint (26) for all times. W e may employ a T aylor-Lagrange Stability (TLS) function [25] to enforce the state conv ergence objective (25), and directly take the cost (24) as the objectiv e to reformulate Problem 1 as a sequance of Quadratic Programs (QPs) that take the control u as the decision v ariable. Since the rTLC only need to consider the current state x ( t 0 ) without x ( ξ ) , ξ ∈ ( t 0 , t ) , we can directly solve the Problem 1 by solving the QPs. I V . C A S E S T U D I E S A N D R E S U L T S In this section, we present a case study for the Adapti ve Cruise Control (ACC). All the computations were conducted in MA TLAB, and we used quadprog to solve QPs and used ode45 to integrate the dynamics. Consider the adaptive cruise control (A CC) problem with the vehicle dynamics in the form: ˙ v ( t ) ˙ z ( t ) = − F r ( v ( t )) M v 0 − v ( t ) + 1 M 0 u ( t ) , (28) where v ( t ) denotes the velocity of the e go vehicle along its lane, z ( t ) denotes the along-lane distance between the ego and its preceding vehicles, v 0 > 0 denotes the speed of the preceding vehicle, M is the mass of the ego vehicle, and u ( t ) is the control input of the controlled vehicle. F r ( v ( t )) denotes the resistance force, which is expressed [30] as: F r ( v ( t )) = f 0 sg n ( v ( t )) + f 1 v ( t ) + f 2 v 2 ( t ) , (29) where f 0 > 0 , f 1 > 0 and f 2 > 0 are scalars determined empirically . The first term in F r ( v ( t )) denotes the coulomb friction force, the second term denotes the viscous friction force and the last term denotes the aerodynamic drag. Objective 1. W e wish to minimize the acceleration of the ego v ehicle in the form: min u Z T 0 u − F r ( v ) M 2 dt. (30) Objective 2. The ego vehicle seeks to achie ve a desired speed v d > 0 . Safety . W e require that the distance z ( t ) between the controlled vehicle and its immediately preceding vehicle be greater than a constant δ > 0 for all the times, i.e., z ( t ) ≥ c, ∀ t ≥ 0 , (31) where c > 0 . Control limitation. W e also consider a control constraint u min ≤ u ( t ) ≤ u max , u min = − c d M g , u max = c a M g , g = 9 . 81 m/s 2 , c a > 0 , c d > 0 for (28). The A CC problem is to find a control polic y that achie ves Objectiv es 1 and 2 subject to the safety constraint and control bound. The relative degree of (31) is two, and we use either a second order HOCBF , TLC, ev ent-triggered TLC, and the proposed rTLC to implement it by defining h ( x ) = z − c ≥ 0 and: L 2 f h ( x ) + L g L f h ( x ) u + ( p 1 + p 2 ) L f h ( x ) + p 1 p 2 h ( x ) ≥ 0 . HOCBF (32) L 2 f h ( x ) + L g L f h ( x ) u + 2 ∆ t L f h ( x ) + 2 ∆ t 2 h ( x ) ≥ 0 . TLC (33) The state bound for the ev ent-triggered TLC is defined as S ( x ) = { y ∈ R 2 : x − x lower ≤ y ≤ x + x up } . L 2 f h ( x ( t 0 )) + L g L f h ( x ) u ( t 0 ) + 2 ∆ t L f h ( x ( t 0 )) + 2 ∆ t 2 h ( x ( t 0 )) + R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) ≥ 0 . rTLC (34) ξ ∈ ( t 0 , t ) , where R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) = ∆ t 3 (( L 3 f h ( x ( ξ )) + L g L 2 f h ( x ( ξ ))) u ( ξ ) +( L f L g L f h ( x ( ξ )) + L 2 g L f h ( x ( ξ ))) u ( ξ ) + L g L f h ( x ( ξ )) ˙ u ( ξ )) , ξ ∈ ( t 0 , t ) . (35) Follo wing (11), the above equation can be re written as R ( x ( ξ ) , u ( ξ ) , ˙ u ( ξ )) = ∆ t 3 ( − ˙ u ( ξ ) − f 1 u ( ξ ) − 2 f 2 v ( ξ ) u ( ξ ) M ) ≥ ∆ t 3 ( − 1 ∆ t ( u max − u ( ξ )) + f 1 u ( ξ ) + 2 f 2 v ( ξ ) u ( ξ ) M ) ≥ ∆ t 3 ( − 1 ∆ t ( u max − u min ) + f 1 u min + 2 f 2 v ( ξ ) u min M ) ≥ ∆ t 3 ( − 1 ∆ t ( u max − u min ) + f 1 u min M ) + ∆ t 3 ( 2 f 2 ( v ( t 0 ) + ∆ t ( u max − F r ( v ( ξ ))) / M ) u min M ) ≥ ∆ t 3 ( − 1 ∆ t ( u max − u min ) + f 1 u min M ) + ∆ t 3 ( 2 f 2 ( v ( t 0 ) + ∆ tu max / M ) u min M ) . (36) W e define the R min by the lower bound in the above equation in the rTLC. W e employ a TLS with relative degree one to enforce the desired speed. All the simulation parameters are shown in T able I, in which dt denotes the time interval we apply the control to the system dynamics (28) at each discretization time. As long as dt ≤ ∆ t , we can easily show that the safety of the system can be guaranteed. The simulation results are shown in Fig 1. All the HOCBF , ev ent-driven TLC and rTLC can guarantee the vehicle safety , T ABLE I S I MU L A T I ON P A R AM E T E RS F OR AC C Parameter V alue Units P arameter V alue Units v (0) 24 m/s z (0) 90 m v 0 13.89 m/s v d 24 m/s M 1650 kg g 9.81 m/s 2 f 0 0.1 N f 1 5 N s/m f 2 0.25 N s 2 /m c 10 m ∆ t 0.1 s dt 0.1 s c a 0.4 unitless c d 0.7 unitless x lower (0.5, 1) unitless x up (0.5,1) unitless T ABLE II C O MPA R IS O N O F MI N I M UM C BF V A L U ES A ND C O MP U TA T I ON T I ME B E TW E E N T I M E - D R IV E N H O C B F , T IM E - D RI V E N T L C , E V E N T - D R IV E N T L C, A ND T H E P RO P OS E D R T L C . S A F E TY I N T I ME - D R IV E N I S V I OL ATE D D U E T O T H E I N T E R - S A MP L I N G E FF EC T . Method min h ( x ) Compute time (s) T ime-driv en HOCBF 1.8250e-7 0.0013 ± 1.8714e-4 T ime-driv en TLC -0.6414 0.0013 ± 1.2619e-4 Event-dri ven TLC 0.6511 0.0017 ± 6.8994e-4 rTLC ∆ t = 0 . 85 , dt = 0 . 1 6.2487 0.0014 ± 1.9303e-4 rTLC ∆ t = 0 . 5 , dt = 0 . 5 1.1867 0.0013 ± 2.0533e-4 rTLC ∆ t = 0 . 1 , dt = 0 . 1 0.0092 0.0014 ± 3.8113e-4 while the time-dri ven TLC may violate the safety constraint due to the inter -sampling effect. Howe ver , the rTLC may be conservati ve as the vehicle stays unnecessarily far away from the preceding vehicle, as shown with a lar ger h ( x ) steady value for rTLC in the last framework of Fig. 1. W e found that decreasing ∆ t could significantly reduce the conservati veness, as sho wn in T able II. The e vent-dri ven TLC is a little more computational expensi ve than other methods. t=s 0 5 10 15 20 25 30 v = ( m=s ) 12 14 16 18 20 22 24 time-driven HOCBF time-driven TLC even t-driven TLC rTLC t=s 0 5 10 15 20 25 30 u= ( M g ) -0.5 0 0.5 t=s 0 5 10 15 20 25 30 h ( x ) 0 20 40 60 Fig. 1. Comparison of speed, control and safety function h ( x ) profiles between between time-dri ven HOCBF , time-dri ven TLC, e vent-dri ven TLC, and the proposed rTLC ( ∆ t = 0 . 85 , dt = 0 . 1 ). V . C O N C L U S I O N W e proposed a robust T aylor-Lagrange control method for ensuring the safety of nonlinear control systems using a higher-order expansion of the safety function with T aylor’ s theorem with Lagrange remainder . The proposed rob ust T aylor-Lagrange control method can naturally address the inter-sampling ef fect while introducing much less hyper- parameters than other methods. W e applied the proposed method to an adaptive cruise control problem to demonstrate the effecti veness of our methods. In the future, we plan to study the tradeof f between conservati veness and feasibility of the proposed robust T aylor-Lagrange control method. W e will also inv estigate how to compute a tighter reachable set for the Lagrange remainder to reduce the conservati veness of the proposed robust T aylor-Lagrange control method. R E F E R E N C E S [1] Bryson and Ho, Applied Optimal Contr ol . W altham, MA: Ginn Blaisdell, 1969. [2] D. E. Kirk, Optimal control theory: an introduction . Courier Corporation, 2004. [3] R. Bellman, “Dynamic programming, ” Science , vol. 153, no. 3731, pp. 34–37, 1966. [4] E. V . Denardo, Dynamic Pr ogramming: Models and Applications . Dover Publications, 2003. [5] C. E. Garcia, D. M. Prett, and M. Morari, “Model predicti ve control: Theory and practice—a surv ey , ” Automatica , vol. 25, no. 3, pp. 335– 348, 1989. [6] J. B. Rawlings, D. Q. Mayne, and M. M. Diehl, Model Predictive Contr ol: Theory , Computation, and Design . Nob Hill Publishing, 2018. [7] M. Althoff and J. M. Dolan, “Online verification of automated road vehicles using reachability analysis, ” IEEE T ransactions on Robotics , vol. 30, no. 4, pp. 903–918, 2014. [8] E. Asarin, T . Dang, and A. Girard, “Reachability analysis of nonlinear systems using conservati ve approximation, ” in International W orkshop on Hybrid Systems: Computation and Contr ol . Springer, 2003, pp. 20–35. [9] S. P . Boyd and L. V andenberghe, Con vex optimization . New Y ork: Cambridge university press, 2004. [10] R. Cheng, G. Orosz, R. M. Murray , and J. W . Burdick, “End-to-end safe reinforcement learning through barrier functions for safety-critical continuous control tasks, ” in Pr oceedings of the AAAI conference on artificial intelligence , vol. 33, no. 01, 2019, pp. 3387–3395. [11] P . Wieland and F . Allgower , “Constructive safety using control barrier functions, ” in Pr oc. of 7th IF AC Symposium on Nonlinear Control System , 2007. [12] K. P . T ee, S. S. Ge, and E. H. T ay , “Barrier lyapunov functions for the control of output-constrained nonlinear systems, ” Automatica , vol. 45, no. 4, pp. 918–927, 2009. [13] J. P . Aubin, V iability theory . Springer , 2009. [14] S. Prajna, A. Jadbabaie, and G. J. Pappas, “ A framework for worst- case and stochastic safety verification using barrier certificates, ” IEEE T ransactions on Automatic Contr ol , vol. 52, no. 8, pp. 1415–1428, 2007. [15] R. Wisnie wski and C. Sloth, “Con verse barrier certificate theorem, ” in Pr oc. of 52nd IEEE Confer ence on Decision and Control , Florence, Italy , 2013, pp. 4713–4718. [16] M. Nagumo, “ ¨ Uber die lage der integralkurven gew ¨ ohnlicher differen- tialgleichungen, ” in Pr oceedings of the Physico-Mathematical Society of Japan. 3r d Series. 24:551-559 , 1942. [17] A. D. Ames, X. Xu, J. W . Grizzle, and P . T abuada, “Control barrier function based quadratic programs for safety critical systems, ” IEEE T ransactions on Automatic Contr ol , vol. 62, no. 8, pp. 3861–3876, 2017. [18] P . Glotfelter, J. Cortes, and M. Egerstedt, “Nonsmooth barrier func- tions with applications to multi-robot systems, ” IEEE contr ol systems letters , vol. 1, no. 2, pp. 310–315, 2017. [19] W . Xiao and C. Belta, “High-order control barrier functions, ” IEEE T ransactions on Automatic Contr ol , vol. 67, no. 7, pp. 3655–3662, 2021. [20] A. Clark, “Control barrier functions for stochastic systems, ” Automat- ica , vol. 130, p. 109688, 2021. [21] M. Srinivasan, S. Coogan, and M. Egerstedt, “Control of multi-agent systems with finite time control barrier certificates and temporal logic, ” in 2018 IEEE Confer ence on Decision and Control (CDC) . IEEE, 2018, pp. 1991–1996. [22] A. J. T aylor and A. D. Ames, “ Adaptive safety with control barrier functions, ” in 2020 American Contr ol Confer ence (ACC) . IEEE, 2020, pp. 1399–1405. [23] W . Xiao, C. Belta, and C. G. Cassandras, “ Adaptiv e control barrier functions, ” IEEE Tr ansactions on Automatic Control , v ol. 67, no. 5, pp. 2267–2281, 2021. [24] Q. Nguyen and K. Sreenath, “Exponential control barrier functions for enforcing high relativ e-degree safety-critical constraints, ” in Proc. of the American Contr ol Conference , 2016, pp. 322–328. [25] W . Xiao and A. Li, “T aylor-lagrange control for safety-critical sys- tems, ” arXiv pr eprint arXiv:2512.11999 , 2025. [26] B. T aylor, Methodus incrementorum dir ecta & in versa . Inny , 1717. [27] J.-L. Lagrange, Th ´ eorie des functions analytiques . De l’Imprimerie de la Republique, 1797. [28] A. J. T aylor , P . Ong, J. Cort ´ es, and A. D. Ames, “Safety-critical ev ent triggered control via input-to-state safe barrier functions, ” IEEE Contr ol Systems Letters , vol. 5, no. 3, pp. 749–754, 2020. [29] W . Xiao, C. Belta, and C. G. Cassandras, “Event-triggered control for safety-critical systems with unknown dynamics, ” IEEE T ransactions on Automatic Control , vol. 68, no. 7, pp. 4143–4158, 2022. [30] H. K. Khalil, Nonlinear Systems , 3rd ed. Prentice Hall, 2002.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment