Average predictive control for nonlinear discrete dynamical systems
We explore the problem of stabilization of unstable periodic orbits in discrete nonlinear dynamical systems. This work proposes the generalization of predictive control method for resolving the stabilization problem. Our method embodies the developme…
Authors: D. Dmitrishin, E. Iacob, A. Stokolos
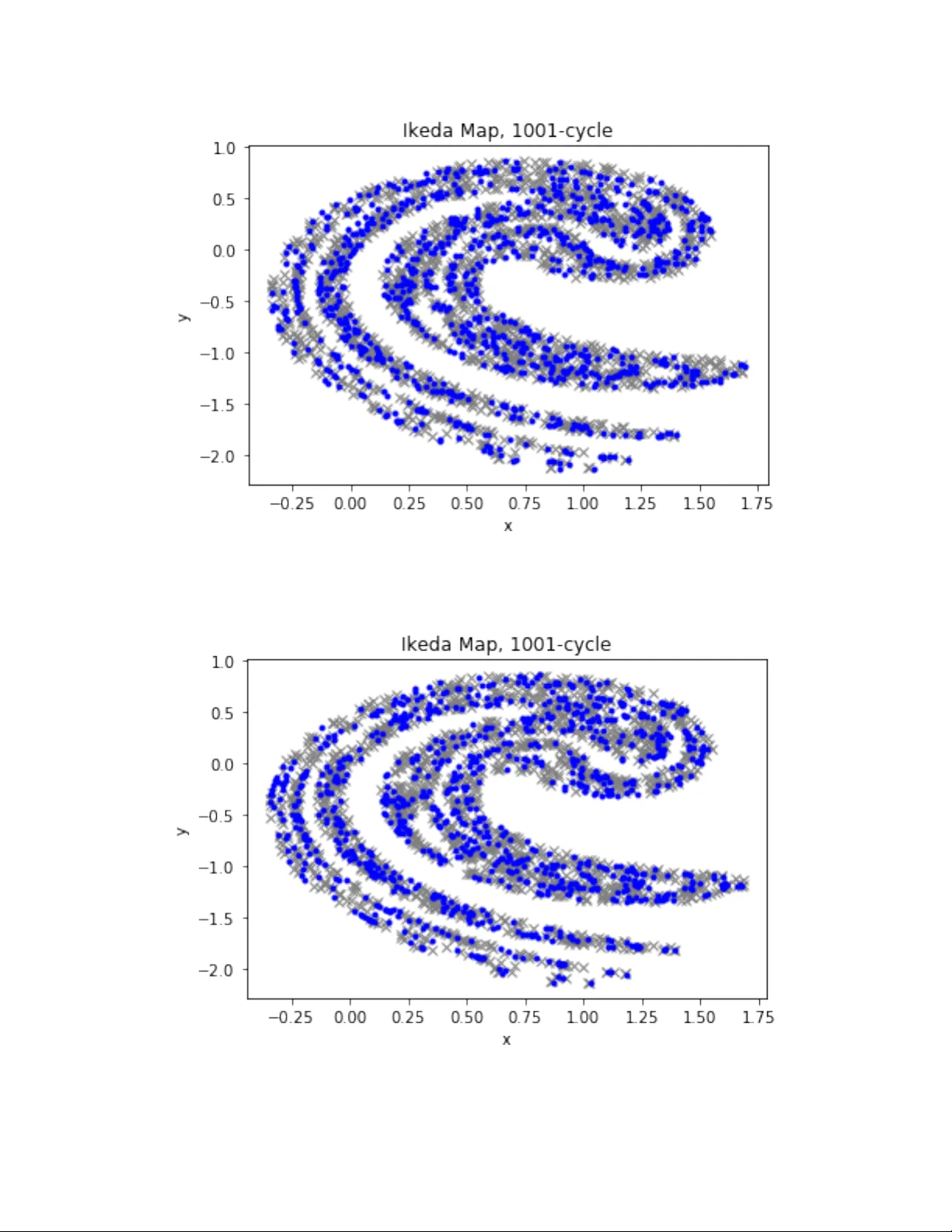
A VERAGE PREDICTIVE CONTROL FOR NONLINEAR DISCRETE DYNAMICAL SYSTEMS D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A B S T R A C T . W e explore the problem of stabilization of unstable periodic orbits in discrete nonlinear dynamical systems. This work proposes the generalization of predictive control method for resolving the stabilization problem. Our method embodies the development of control method proposed by B.T . Polyak. The control we propose uses a linear (con- vex) combination of iterated functions. W ith the proposed method auxiliary , the problem of robust cycle stabilization for various cases of its multipliers localization is solved. An algorithm for finding a given length cycle when its multipliers are known is described as a particular case of our method application. Also, we present numerical simulation re- sults for some well-known mappings and the possibility of further generalization of this method. 1. I N T R O D U C T I O N Nonlinear dynamical systems are often characterized by extr emely unstable move- ments in the phase space, defined as chaotic movements [5]. In practice, it is generally desirable to suppr ess or prevent such chaotic behavior due to its adverse effect on the physical systems normal operation. Due to its theoretical significance and engineering applicability , much attention has been paid to the problem of chaos controlling in vari- ous fields and numerous studies [2, 3, 12, 19]. By chaos control we mean small external influences on the system or a small change in the system structure in order to transform the system chaotic behavior into a regular (or chaotic, still specific with other properties) one [11]. It is assumed that the dynamical system includes a chaotic attractor , which contains a countable set of unstable cycles with differ ent periods. If, by using some control effect, a certain cycle is stabilized locally , the system path will remain in its neighborhood, i.e. regular movements will be observed in the system. Hence, one of the ways for chaos controlling r efers to the local stabilization of certain orbits from a chaotic attractor . The problem of stabilizing cycles is closely related to the problem of finding periodic points. The various control schemes [1, 4, 9] that were pr oposed for solving these pr oblems can be divided into two large groups: direct and indirect methods. The indirect methods either use the initial mapping T iterations or imply the construction a system of which order is T times greater than the initial system order ( T being the desired cycle length). Then one of the methods of finding a fixed point is applied. The most common among fixed point finding techniques is the Newton-Raphson relaxation method and its further modifications [10, 16, 19, 28]. The next step is to select periodic points from the entir e set of fixed points. In direct methods, all the points in the cycle are found concurrently , i.e. the whole cycle is stabilized. In this case, the initial system is closed by control, based on the 2010 Mathematics Subject Classification. Primary: 37F99; Secondary: 34H10. Key words and phrases. Non-linear discrete systems, stabilization, pr edictive control. 1 2 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS feedback principle [7, 17, 22, 27]. Among such control schemes, the most simple in terms of physical implementation are the linear ones. However , they have significant limitations, as they can only be applied to a narrow domain of the space of parameters that are part of the initial nonlinear system [6, 25, 29]. T o overcome the restricted stabilization condition Ushio and Y amamoto [26] introduced a prediction-based feedback control method for discrete chaotic systems with accurate mathematical model. B.T . Polyak [20] (see also [21]) proposed a dir ect predictive control method that works well for one-dimensional as well as multidimensional maps. L. Shalby [24] used predictive feedback contr ol method for stabilization of continuous time systems. Another possible contr ol schemes classification into two gr oups: methods using the Ja- cobi matrix and methods not based on this matrix. Naturally , it is assumed that the Jacobi matrix at the cycle points is not properly known, otherwise it would be possible to use the whole powerful apparatus of the linear control theory applied to systems linearized in the cycle neighborhood. The Jacobi matrix is an indispensable attribute of Newton- Raphson-type methods. This matrix is also used in one of the modifications derived fr om Polyak predictive contr ol method. One of the main disadvantages of Polyak scheme refers to the need for knowing the Jacobi matrix for the cycle, or at least the need for sufficiently good estimates of the cycle multipliers. The research exposed herein is purposed to improve the Polyak method by replacing it with mixed predicted values. A Jacobi matrix repr esentation for the T cycle at a controlled system is found through the Jacobi matrix of the same cycle in the initial system. Ther efore, the correspondence between the cycle multipliers of the open loop system and those of closed loop system is established. Below , it is assumed that the initial system cycle multipliers ar e not exactly known, we know only know the range of their localization. Then the solution of cycles robust stabi- lization problem for various localization of multipliers is given, and taking into account these general provisions the Polyak method is considered. It is worth noting that in the general case of complex multipliers, we must know precisely enough their localization regions. At the end, the applications of proposed predictive control scheme to stabilize the cycles of some common systems in Physics literature ar e considered. 2. P R O B L E M S TAT E M E N T . Considered is a nonlinear discr ete system (1) x n + 1 = f ( x n ) , x n ∈ R m , n = 1, 2, . . . , where f ( x ) is a differ entiable vector function of corresponding dimension. It is assumed that the system (1) has an invariant convex set A , i.e. if ξ ∈ A , then f ( ξ ) ∈ A . W e em- phasize that we do not assume that the set A is a minimally convex set. It is also assumed that this system has one or several unstable T cycles { η 1 , . . . , η T } , where all vectors ar e differ ent and belong to the invariant set A , i.e. η j + 1 = f η j , j = 1, . . . , T − 1, η 1 = f ( η T ) . The considered unstable cycles multipliers are determined as eigenvalues of the product of Jacobi matrices T ∏ j = 1 f 0 η T − j + 1 of dimensions m × m at the cycle points. The matrix T ∏ j = 1 f 0 η T − j + 1 is called the Jacobi matrix of the cycle { η 1 , . . . , η T } . T ypically , a priori the A VERAGE PREDICTIVE CONTROL 3 cycles of the system (1) are not known. Consequently , the spectrum { µ 1 , . . . , µ m } of the matrix T ∏ j = 1 f 0 η T − j + 1 is unknown as well. The spectrum elements are called cycle mul- tipliers. Below , we assume that some estimates on the localization set M for the cycle multipliers are known. Let us consider the control system (2) x n + 1 = F ( x n ) , where F ( x ) = N ∑ j = 1 θ j f (( j − 1 ) T + 1 ) ( x ) , f ( 1 ) ( x ) = f ( x ) , f ( k ) ( x ) = f f ( k − 1 ) ( x ) , k = 2, . . . , T . The numbers θ 1 , . . . , θ N are real. It can be easily verified that at N ∑ j = 1 θ j = 1 the system (2) also includes the cycle { η 1 , . . . , η T } . W e aim to choose such parameter N and coefficients { θ 1 , . . . θ N } so that the system (2) cycle { η 1 , . . . , η T } would be locally asymptotically sta- ble. Naturally , when constructing these coefficients, there will be used information on set M of multipliers localization. It is also desirable [13, 14] to fulfill an additional condi- tion: the system (1) invariant convex set A must be also invariant for the system (2). This requir ement will be fulfilled, for example, if 0 ≤ θ j ≤ 1, j = 1, . . . , N . Polyak method [20] utilizes the case θ 1 = 1, θ 2 = · · · = θ N − 2 = 0, θ N − 1 = − θ N = ε . Regarding the set M , it was assumed that M = D ∪ { µ ∗ } where D = { z : | z | < 1 } is the central unit circle on the complex plane, and µ ∗ is a known r eal number . In the case m = 1 the requir ed coefficient formula has the form ε = 1 ∓ ( | µ ∗ | / ρ ) − 1 T ( µ ∗ ) N − 2 ( µ ∗ − 1 ) where 0 < ρ < 1. In this article the contr ol problem is solved for a wider class of multipliers localization set M . 3. C O N S T R U C T I N G T H E J A C O B I M AT R I X F O R A C O N T R O L L E D S Y S T E M Investigating stability of T cycles of the system (2) consists in constructing of Jacobi matrix T ∏ j = 1 F 0 η T − j + 1 of that cycle and studying the eigenvalues of this matrix. T o derive the Jacobi matrix, we use the ideas from [20]. Let J j = f 0 η j , j = 1, . . . , T , then we write the Jacobi matrix of the system (1) cycle { η 1 , . . . , η T } as J = J T · . . . · J 1 . W e introduce the following auxiliary matrices: A 1 = I , A 2 = J 1 , A 3 = J 2 · J 1 , . . . , A T − 1 = J T − 1 · . . . · J 1 ( I − unity matrix of order m × m ) ; B 1 = J T · . . . · J 1 = J , B 2 = J T · . . . · J 2 , . . . , B T = J T ; then B k A k = J , k = 1, . . . , T , A k B k = ( J k − 1 · . . . · J 1 ) · ( J T · . . . · J k ) and, consequently , ( A k B k ) s = A k J s − 1 B k , s = 1, 2, . . .. By chain rule: f ( s ) ( x ) 0 x = η i = f ( s − 1 ) ( x ) 0 x = η i + 1 · ( f ( x ) ) 0 x = η i = f ( s − 1 ) ( x ) 0 x = η i + 1 · J i , 4 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS we get f (( j − 1 ) T ) ( x ) 0 x = η i = A i J j − 2 B i , j = 2, . . . , N and therefor e f (( j − 1 ) T + 1 ) ( x ) 0 x = η i = J i A i J j − 2 B i , j = 2, . . . , N . Next we find that F 0 ( η i ) = N ∑ j = 1 θ j f (( j − 1 ) T + 1 ) ( x ) 0 x = η i = θ 1 J i + N ∑ j = 2 θ j J i A i J j − 2 B i . For the Jacobi matrix of the system (2) cycle { η 1 , . . . , η T } we can write: F 0 ( η T ) · . . . · F 0 ( η 1 ) = J T θ 1 I + A T N ∑ j = 2 θ j J j − 2 ! B T ! · J T − 1 θ 1 I + A T − 1 N ∑ j = 2 θ j J j − 2 ! B T − 1 ! · . . . · J 1 θ 1 I + A 1 N ∑ j = 2 θ j J j − 2 ! B 1 ! T aking into account that J k θ 1 I + A k N ∑ j = 2 θ j J j − 2 ! B k ! = J k A k θ 1 I + N ∑ j = 2 θ j J j − 2 ! B k A k ! A − 1 k = J k A k N ∑ j = 1 θ j J j − 1 ! A − 1 k and J k A k = A k + 1 it follows that F 0 ( η T ) · . . . · F 0 ( η 1 ) = = J T A T N ∑ j = 1 θ j J j − 1 ! A − 1 T · J T − 1 A T − 1 N ∑ j = 1 θ j J j − 1 ! A − 1 T − 1 · . . . · · J 1 A 1 N ∑ j = 1 θ j J j − 1 ! A − 1 1 = J N ∑ j = 1 θ j J j − 1 ! T (The r eader is gently advised that the superscript T in the formula above and all subse- quent formulas denotes power , not transpose.) For deriving the Jacobian formula above it was assumed that the matrix J was not degenerated. This limitation can be easily circumvented using a well-known topological technique: considering the matrix J + δ I instead of the degenerated matrix J and after all calculations taking the limit as δ → 0. Thus, the following result is obtained. Lemma 3.1. The Jacobi matrix of the cycle { η 1 , . . . , η T } in the system (2) can be repr esented as (3) J N ∑ j = 1 θ j J j − 1 ! T , A VERAGE PREDICTIVE CONTROL 5 where J is the Jacobi matrix of the cycle { η 1 , . . . , η T } in the system (1) . W e now consider another control system, instead of system (2): (4) x n + 1 = f θ 1 x n + N ∑ j = 2 θ j f (( j − 1 ) T ) ( x n ) ! . When N ∑ j = 1 θ j = 1 then the system (4) preserves the cycle { η 1 , . . . , η T } . In addition, ac- cording to formula (3), the Jacobi matrix of the system (4) cycle is expressed in the terms of Jacobi matrix of the system (1). The advantage of the control system (4) over the sys- tem (2) consists of a fewer calculation of the values for function f ( x ) (more precisely , the differ ence is N − 2). 4. M A I N R E S U LT All results presented in this section are formulated for system (2), however they hold without change for system (4). Theorem 4.1. Suppose f ∈ C 1 and that the system (1) has an unstable T cycle with multipliers { µ 1 , . . . , µ m } . Then this cycle will be a locally asymptotically stable cycle of the system (2) if µ j r µ j T ∈ D , j = 1, . . . , m , where r ( µ ) = N ∑ j = 1 θ j µ j − 1 . Proof. According to Lemma 3.1, the characteristic polynomial for a system of linear ap- proximation in the cycle neighbour hood in the case of system (2) can be written as ϕ ( λ ) = det λ I − J [ r ( J ) ] T . By reducing the matrix J to the Jordan form, this characteristic poly- nomial can be represented as ϕ ( λ ) = m ∏ j = 1 λ I − µ j r µ j T , from where the theorem conclusion follows. Note that the condition r ( 1 ) = 1 is obligatory . If, additionally , θ j ∈ [ 0, 1 ] for j = 1, . . . , N , then µ j r µ j T ∈ D when µ j ∈ D , and hence µ j r µ j T < µ j 1 + T . This means that if some multiplier of the system (1) cycle lies in the unit cir cle, the corresponding multiplier of the system (2) will lie closer to zero. Thus for the closed loop system, the stabilization quality is improving. V arious estimates for multipliers allow us to construct control systems that stabilize cycles. 4.1. Case M = { µ 1 , . . . , µ m } . If the multipliers are exactly known, we can choose N = m + 1 and the coefficients { θ 1 , . . . , θ m + 1 } from the condition r ( µ ) = m + 1 ∑ j = 1 θ j µ j − 1 = 1 m ∏ k = 1 ( 1 − µ k ) m ∏ k = 1 ( µ − µ k ) . Then from Theor em 4.1 we get the following conclusion. Conclusion. Suppose that f ∈ C 1 and the system (1) has an unstable T cycle with mul- tipliers { µ 1 , . . . , µ m } , and the coefficients θ 1 , . . . , θ m + 1 are found as exposed above. Then this cycle will be a locally asymptotically stable cycle of system (2). Moreover , if the initial point belongs to the cycle basin of attraction, the convergence to the cycle is superlinear . 6 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS The superlinearity of the convergence rate follows from the fact that all multipliers of system (2) { η 1 , . . . , η T } cycle turn out to be zero. Note that the authors are unawar e about any other method that allow to stabilize a cycle by knowing the cycle multipliers only . Unfortunately , in a typical situation the multipliers are either unknown. The best we can expect is to localize them appr oximately . What to do in that case is considered in the next section. 4.2. Case M = { z : Re z ≤ 0 } ∪ D . Theorem 4.2. Suppose f ∈ C 1 and that system (1) has an unstable T -cycle with multipliers { µ 1 , . . . , µ m } satisfying the conditions: µ j − b µ j < δ j , Re µ j ≤ 0, j = 1, . . . , n 1 , µ j < 1, j = n 1 + 1, . . . , m . Let the coefficients θ j , j = 1, . . . , N , of the system (2) be determined from the condition n 1 + 1 ∑ j = 1 θ j µ j − 1 = 1 n 1 ∏ k = 1 ( 1 − b µ k ) n 1 ∏ k = 1 ( µ − b µ k ) ( here N = n 1 + 1 ) . Then, for sufficiently small values δ j , j = 1, . . . , n 1 , the T -cycle will be a locally asymptotically stable cycle of system (2) . Proof. Since Re µ j < 0, j = 1, . . . , n 1 , then all coefficients θ j > 0, j = 1, . . . , n 1 . That means that µ [ r ( µ ) ] T < | µ | 1 + T when | µ | < 1, i.e. the eigenvalues of the Jacobi matrix of system (2) cycle corresponding to multipliers µ j , j = n 1 + 1, . . . , m , are smaller than the multipliers absolute values. Let δ j = 0, j = 1, . . . , n 1 , then the eigenvalues corresponding to multipliers µ j , j = 1, . . . , n 1 , ar e equal to zero. When δ j , j = 1, . . . , n 1 , ar e suf ficiently small in magnitude, these eigenvalues will lie in the central unit circle, as follows from Rouche theor em. Thus, all eigenvalues will less than 1 in absolute value, which means local asymptotic stability . 4.3. Case M = D ∪ { µ ∗ } , | µ ∗ | > 1 [20]. In [20], the coefficients θ 1 , . . . , θ N were chosen as θ 1 = 1, θ 2 = . . . = θ N − 2 = 0, θ N − 1 = − θ N = ε , where ε = 1 ∓ ( | µ ∗ | / ρ ) − 1 T ( µ ∗ ) N − 2 ( µ ∗ − 1 ) , 0 < ρ < 1. Such a choice ensures that the multipliers belong to the open central unit interval corre- sponding to µ ∗ . However , the condition µ [ r ( µ ) ] T < 1 with | µ | < 1 is not necessarily satisfied. Nevertheless, the value ε can be made arbitrarily small by choosing the num- ber N large. And then, from Rouche’s theorem, it follows that with a suf ficiently lar ge N the other multipliers will remain within the central unit circle. This ensures the local asymptotic stability of the system (2) cycle. When it is known that µ ∗ < − 1, the control scheme can be simplified, namely: (5) x n + 1 = θ 1 f ( x n ) + θ 2 f ( T + 1 ) ( x n ) , where θ 1 = | µ ∗ | 1 + | µ ∗ | , θ 2 = 1 1 + | µ ∗ | . A VERAGE PREDICTIVE CONTROL 7 4.4. Case M = D ∪ { µ ∗ , µ ∗ } , | µ ∗ | > 1 . The case of general localization of multipliers { µ 1 , . . . , µ m } for the system (1) cycle was considered in [20] but only for T = 1. In that case, the coef ficients θ 1 , . . . , θ N were no longer scalars but matrices and, as befor e, wer e chosen as θ 1 = I , θ 2 = . . . = θ N − 2 = 0, θ N − 1 = − θ N = ε , where I is identity matrix, 0 is zero matrix, ε = S Λ S − 1 , Λ = diag { ε 1 , . . . , ε m } , ε j = 1 + e ı ϕ ρ / µ j µ j N − 2 µ j − 1 , if µ j < 1, and ε j = 0, if µ j > 1, and 0 < ρ < 1, ϕ ∈ { 0, π } if µ j as a real number . The matrix S consists of the eigenvectors of the Jacobi matrix J for equilibrium point. Thus, to apply the stabilization method, it is necessary to know not only all the multipliers of the equilibrium, but also the Jacobi matrix itself. That is impossible when the equilibrium is not known. Now , let us we apply the scheme (2). Let µ ∗ = ρ e ı ϕ . Then r ( µ ) = ( µ − µ ∗ ) ( µ − µ ∗ ) ( 1 − µ ∗ ) ( 1 − µ ∗ ) = ρ 2 ρ 2 − 2 ρ cos ϕ + 1 + − 2 ρ cos ϕ ρ 2 − 2 ρ cos ϕ + 1 µ + 1 ρ 2 − 2 ρ cos ϕ + 1 µ 2 . If the complex number µ ∗ lies in the left half-plane, then the coefficients of polynomial r ( µ ) are positive, so µ [ r ( µ ) ] T < | µ | 1 + T with | µ | < 1. Therefor e, each multiplier of sys- tem (2) cycle lying in the central unit circle turns out to be in absolute value less then the multiplier of the corresponding cycle of the system (1). Also, the multipliers correspond- ing to µ ∗ and µ ∗ change to zero. If the multipliers µ ∗ and µ ∗ are not exactly known, but they can be well estimated, then for the coefficients θ 1 , θ 2 , θ 3 , although differ ent from the calculated ones, the values of the polynomial with these coefficients at points µ ∗ and µ ∗ will not exceed 1 in absolute value, as follows from the Rouche theorem. The desired control system is x n + 1 = θ 1 f ( x n ) + θ 2 f ( T + 1 ) ( x n ) + θ 3 f ( 2 T + 1 ) ( x n ) , where θ 1 = ρ 2 ρ 2 − 2 ρ cos ϕ + 1 , θ 2 = − 2 ρ cos ϕ ρ 2 − 2 ρ cos ϕ + 1 , θ 3 = 1 ρ 2 − 2 ρ cos ϕ + 1 . 4.5. Case T = 1, M = b − µ ∗ , µ ∗ c , M = b − µ ∗ , 1 c . Suppose M = b − µ ∗ , µ ∗ c . Fr om The- orem 4.1 it follows that in order to stabilize the equilibrium, it would be necessary to construct a polynomial µ r ( µ ) , so that r ( 1 ) = 1 and | µ r ( µ ) | ≤ 1 for all | µ | < µ ∗ . Theorem 4.3. Let f ∈ C 1 and the system (1) has unstable equilibrium with multipliers { µ 1 , . . . , µ m } ⊂ [ − µ ∗ , µ ∗ ] . Let the value N be odd and be chosen from the condition csc π 2 N > µ ∗ , and the coeffi- cients θ 1 , . . . , θ N from the condition µ r ( µ ) = µ N ∑ j = 1 θ j µ j − 1 = ( − 1 ) N − 1 2 T N µ sin π 2 N , where T N ( x ) is the first kind Chebyshev polynomial of odd order N . Then this equilibrium will be a locally asymptotically stable equilibrium of system (2) (modulo a finite number of cases when µ j = cos π k / N sin π /2 N for some k = 1, . . . , N − 1 ). 8 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS The pr oof follows from the properties of the first kind Chebyshev polynomials: | µ r ( µ ) | ≤ 1 at µ sin π 2 N ≤ 1, r ( 1 ) = 1.Note that µ ∗ → ∞ ( N → ∞ ) with asymptotics 2 π N . Now we will consider the case of M = b − µ ∗ , 1 c . Theorem 4.4. Let f ∈ C 1 and the system (1) has unstable equilibrium with multipliers { µ 1 , . . . , µ m } ⊂ b − µ ∗ , 1 c . Let the N value be chosen from the condition cot 2 π 4 N > µ ∗ , and the coefficients θ 1 , . . . , θ N from the conditions µ r ( µ ) = µ N ∑ j = 1 θ j µ j − 1 = T N µ 1 − cos π 2 N + cos π 2 N , where T N ( x ) is the first kind Chebyshev polynomial of order N . Then this equilibrium will be locally asymptotically stable equilibrium of the system (2) (modulo a finite number of cases). Proof. Note that r ( 0 ) = T N ( cos π /2 N ) = 0, r ( 1 ) = T N ( 1 ) = 1. In addition | T N ( x ) | ≤ 1, at | x | ≤ 1, whence | µ r ( µ ) | ≤ 1 at µ 1 − cos π 2 N + cos π 2 N ≤ 1. The last inequality is equivalent to − cot 2 π 4 N ≤ µ ≤ 1, which proves the theor em. Note that µ ∗ → ∞ ( N → ∞ ) with asymptotics 16 π 2 N 2 . 4.6. The general case. Using the ideas from Theorem 4.1 cases, we can propose the fol- lowing T -cycle stabilization scheme, for which the coefficients θ j are not necessarily con- stants: a) find the matrix f 0 ( x ) , b) find the vectors f ( s ) ( x ) , s = 1, . . . , T − 1, c) find the matrix f 0 f ( T − 1 ) ( x ) · . . . · f 0 ( f ( x ) ) · f 0 ( x ) d) find the matrix characteristic polynomial m + 1 ∑ j = 1 θ j ( x ) µ j − 1 , e) normalize the characteristic polynomial 1 m + 1 ∑ j = 1 θ j ( x ) m + 1 ∑ j = 1 θ j ( x ) µ j − 1 , f) build the control system x n + 1 = F ( x n ) , where F ( x ) = 1 m + 1 ∑ j = 1 θ j ( x ) m + 1 ∑ j = 1 θ j ( x ) f (( j − 1 ) T + 1 ) ( x ) or F ( x ) = f 1 m + 1 ∑ j = 1 θ j ( x ) θ 1 x + m + 1 ∑ j = 2 θ j ( x ) f (( j − 1 ) T ) ( x ) ! A VERAGE PREDICTIVE CONTROL 9 Let us consider how this scheme looks like in the case of a linear problem. Let f ( x ) = A x where A is a non-degenerate m × m matrix. Then η = 0 is a single fixed point, in the absence of any higher order cycles. W e choose θ j from the condition 1 det ( I − A ) det ( µ I − A ) = m + 1 ∑ j = 1 θ j µ j − 1 . Then the control system is x n + 1 = 1 m + 1 ∑ j = 1 θ j m + 1 ∑ j = 1 θ j A j x n . By the Hamilton- Cayley theorem it follows that this system right-hand side is an identical zer o. In the general case, applying this method to stabilizing chaotic motion tending to mix- ing, one can expect that after a certain number of iterations the trajectory falls into the basin of attraction for the stabilized cycle. Then the convergence to the cycle will be su- perlinear . Note that if in all the considered cases θ j is being used instead of θ j , then it becomes possible to stabilize the system (1) cycles with multipliers lying in M = D ∪ { µ : Re ( µ ) ≤ 0 } . Mor eover , the convex invariant set of system (1) will r emain such for system (2). In addition, the system (2) multipliers, corr esponding to those multipliers of system (1) that lie in the unit circle, will become closer to zer o. 5. E X A M P L E S Let us illustrate the ef fectiveness of the generalized pr edictive control method for find- ing periodic orbits with several well-known examples of scalar and vector chaotic sys- tems [23]. W e have experimented with various number of cycles (28, 50, 101, 1001, etc.) using Maple and Python. The results we include here are all for T = 101 (sections 5.1– 5.12), with a precision of 250 decimals. More results, including the Python code to repli- cate all r esults, can be found in the Appendix. It is essential to note that stabilization took only a few iterations (less than 10) for the majority of the systems. The scheme applied for the logistic and triangular mappings (examples from sections 5.1 – 5.2) was a general scheme x n + 1 = θ ( x n ) 1 + θ ( x n ) f ( x n ) + 1 1 + θ ( x n ) f ( T + 1 ) ( x n ) , θ ( x n ) = − f 0 f ( T − 1 ) ( x n ) · . . . · f 0 ( f ( x n ) ) · f 0 ( x n ) . It was possible to find a large number of cycles for all considered periods T ; in general, differ ent initial conditions are pr oducing different cycles. Numerical calculations show that with sufficiently dense initial values grid, all cycles of a given length can be found. However , in t his case it is necessary to ensure that the point x n remains within the invari- ant set, otherwise, as a rule it goes to infinity . If we use | θ ( x ) | instead of θ ( x ) , the point x n will always remain in the invariant set. However , in this case we can find cycles only with multipliers from the set M = D ∪ { µ : Re ( µ ) ≤ 0 } . In the two-dimensional case, the scheme used was (6) x n + 1 = f θ 1 + θ x n + 1 1 + θ f ( T ) ( x n ) . 10 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS The value θ should be chosen according to the condition x θ 1 + θ + 1 1 + θ x T ∈ D at x = µ ∗ j , where µ ∗ j are cycle multipliers ( j = 1, 2 ) , and in general, they are unknown. In the examples below , one of the multipliers never exceeds one in magnitude, while the second one is negative, greater than one in absolute value. The Theorem 4.2 guarantees stability conditions even if the parameter θ satisfies x θ 1 + θ + 1 1 + θ x T 6 = 0. It is enough have θ in the neighborhood of multiplier . In general Theorem 4.2 does not provide the estimate on the parameters, however when one multiplier is in the unit disc and the other is real and negative an elementary trial works quite ef fectively . Thus θ > 0, and we only have to check the compliance with the condition for the second multiplier (7) µ ∗ 2 θ 1 + θ + 1 1 + θ µ ∗ 2 T < 1. Let θ = | µ ∗ 2 | + ∆ and assume that | µ ∗ 2 | < 2 T . If requir ed that θ 1 + θ + 1 1 + θ µ ∗ 2 < 1 2 , which is equivalent to − 1 3 ( 1 + | µ ∗ 2 | ) < ∆ < 1 + | µ ∗ 2 | , or θ ∈ 2 3 | µ ∗ 2 | − 1 3 , 2 | µ ∗ 2 | + 1 . Now , if θ < 2 3 | µ ∗ 2 | − 1 3 then 2 θ ≤ 2 | µ ∗ 2 | + 1. Therefor e, choosing θ = 2 k subsequently for k = 1, 2, ... we are sur e that for some k we get θ ∈ 2 3 | µ ∗ 2 | − 1 3 , 2 | µ ∗ 2 | + 1 , then the condition (7) will be satisfied. Thus, the grid for sorting parameter θ should be chosen rather coarse. This justifies the procedur e we used in our examples: running (6) with small values for θ and then doubling them until obtaining required cycles. T o our surprise, the pr ocedure turns out to be quite efficient. However , this idea has been successfully used recently in adaptive interior-point methods by Lesaja and Potra [15]. Therefor e, the scheme (6) allows finding cycles both with small multipliers (examples from sections 5.3 – 5.8) and with large ones (examples from sections 5.9 – 5.12). In general, the large value of multipliers is not the main obstacle. More challenging is the problem of small basins of attraction for long cycles. Therefor e, it is convenient to either select a dense grid for initial values or use a suf ficiently large number of iterations so that the point x n would fall into the desired basin of attraction. One can achieve any acceptable accuracy in determining the cyclic point. Our subsequent experiments used pr ecision 250 decimals. 5.1. Logistic mapping. The logistic mapping (8) x n + 1 = h x n ( 1 − x n ) , is, perhaps, the most popular example. Let us consider the case h = 3.99, T = 101. Figure 1 illustrates one of its numer ous T = 101-cycles. A VERAGE PREDICTIVE CONTROL 11 F I G U R E 1 . A 101-cycle of the logistic mapping (8). 5.2. T riangular mapping. Our next example is the triangular mapping: (9) x n + 1 = h ( 1 − | 2 x n − 1 | ) , h = 0.99. Figure 2 shows a T = 101-cyclic point. 12 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 2 . A 101-cycle of triangular system (9). 5.3. Burgers mapping. For the Burgers mapping: (10) x n + 1 = a x n − y 2 n , y n + 1 = b y n + x n y n , a = 0.75, b = 1.75 a 101-cyclic point is illustrated in Figure 3. A VERAGE PREDICTIVE CONTROL 13 F I G U R E 3 . A 101-cycle of the Burgers system (10). 5.4. T inkerbell mapping. The T inkerbell mapping: (11) x n + 1 = x 2 n − y 2 n + a x n + b y n , y n + 1 = 2 x n y n + c x n + d y n , a = 0.9, b = − 0.6, c = 2.0, d = 0.5 has a 101-cyclic point illustrated in Figure 4. 14 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 4 . A 101-cycle of the T inkerbell mapping (11). 5.5. Gingerbredman mapping. The Gingerbredman mapping: (12) x n + 1 = 1 + | x n | − y n , y n + 1 = x n has a 101-cyclic point repr esented in Figure 5. A VERAGE PREDICTIVE CONTROL 15 F I G U R E 5 . A 101-cycle of the Gingerbredman mapping (12). 5.6. Prey-predator mapping. For the prey-pr edator mapping: (13) x n + 1 = x n exp ( a ( 1 − x n ) − by n ) , y n + 1 = x n ( 1 − exp ( − cy n ) ) , a = 3, b = 5, c = 5 a corresponding 101-cyclic point is illustrated in Figur e 6. 16 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 6 . A 101-cycle of the prey-pr edator system (13). 5.7. Delayed logistic mapping. Figure 7 shows a 101-cyclic point of the delayed logistic mapping: (14) x n + 1 = h x n ( 1 − y n ) , y n + 1 = x n , h = 2.27 A VERAGE PREDICTIVE CONTROL 17 F I G U R E 7 . A 101-cycle of the delayed logistic mapping system (14). 5.8. Hénon mapping. The Hénon mapping: (15) x n + 1 = 1 + a x 2 n + y n , y n + 1 = b x n , a = − 1.40000001, b = 0.30000002 has a 101-cyclic point repr esented in Figure 8. 18 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 8 . A 101-cycle of Hénon system (15). 5.9. Elhadj-Sprott mapping. The Elhadj-Sprott mapping: (16) x n + 1 = 1 + a sin x n + by n , y n + 1 = x n , a = − 4.0, b = 0.9 has a 101-cyclic point illustrated in Figure 9. A VERAGE PREDICTIVE CONTROL 19 F I G U R E 9 . A 101-cycle of the Elhadge-Sprott system (16). 5.10. Lozi mapping. The Lozi mapping: (17) x n + 1 = 1 + a | x n | + by n , y n + 1 = x n , a = − 1.7, b = 0.5 has a 101-cyclic point shown in Figure 10. 20 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 1 0 . A 101-cycle of the Lozi system (17). 5.11. Ikeda mapping. The Ikeda mapping is given by the equations: (18) x n + 1 = 1 + u ( x n cos τ n − y n sin τ n ) , y n + 1 = u ( x n sin τ n + y n cos τ n ) , where u = 0.9, τ n = 0.4 − 6 1 + x 2 n + y 2 n . The mapping has a 101-cyclic point illustrated in Figure 11. A VERAGE PREDICTIVE CONTROL 21 F I G U R E 1 1 . A 101-cycle of the Ikeda system (18). 5.12. Holmes cubic mapping. The Holmes cubic mapping: (19) x n + 1 = y n , y n + 1 = a x n + by n − y 3 n , a = − 0.2, b = 2.77 has a 101-cyclic point shown in Figure 12. 22 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS F I G U R E 1 2 . A 101-cycle of the Holmes cubic system (19). 6. C O N C L U S I O N This article deals with the pr oblem of stabilization for nonlinear systems of two cate- gories: those unstable and those with a priori unknown periodic orbits at discr ete time. A well-known method of stabilizing contr ols, called the pr edictive control method, first pr o- posed by B.T .Polyak, have been thoroughly investigated in this work. W e have found that this method has several disadvantages: it is necessary to know the cycle exact multiplier or its suf ficiently accurate estimate even in the scalar case; in the vector case, one must know the whole cycle Jacobi matrix; consequently , the proposed control does not have the requir ed r obustness with respect to the system parameters perturbations; the control gain coefficients have differ ent signs, which can trigger the initial system multiplier ’s shifting beyond the central unit circle (where it lies) when applying the control; ther efore, the gain coefficients must be small, and, in order to evaluate them at every instance, we need to know the multiplier ’s value. All these shortcomings imply the necessity to modify the predictive control method. W e propose not only to use the first and last iterations of the original mapping, but also all previous ones, by considering their linear combination. This linear combination’s co- efficients ar e sought as being of a special polynomial, characterized by certain pr operties. As a result, it was possible for us to extend the pr edictive control scope. In addition, if the coefficients are non-negative, then for the initial system cycle multipliers lying in the central unit circle the corr esponding multipliers of the control system cycle become closer to zero. An algorithm is given as a special case of this method application, for finding a cycle of a given length when its multipliers are known. A VERAGE PREDICTIVE CONTROL 23 One of the possible directions for futur e r esearch is related to investigating new contr ol schemes that combine the use of control system previous states and the initial system predicted states, i.e. the predictive control shall be considered together with the semi- linear control [8] as follows: (20) X n = N 1 ∑ j = 1 a j x n − j T + T Y n = N 2 ∑ j = 1 b j x n − j T + 1 F ( x ) = N 3 ∑ j = 1 θ j f (( j − 1 ) T + 1 ) ( x ) x n + 1 = ( 1 − γ ) F ( X n ) + γ Y n where N 1 ∑ j = 1 a j = 1, N 2 ∑ j = 1 b j = 1, N 3 ∑ j = 1 θ j = 1. Clearly , the T -cycles of systems (1) and (20) coincide. The conditions of the system (20) T -cycle local asymptotic stability can be for- mulated as µ j r µ j T ∈ C \ Φ D ∗ , j = 1, . . . , m , Φ ( z ) = ( 1 − γ ) T z ( q ( z ) ) T ( 1 − γ p ( z ) ) T , q ( z ) = N 1 ∑ j = 1 a j z j − 1 , p ( z ) = N 2 ∑ j = 1 b j z j − 1 , where C is an extended complex plane, and the asterisk denotes the r eciprocal operation: ( z ) ∗ = 1 z . The semilinear control method (when N 3 = 1 in (20)) has also certain disadvantages [8, 9]. Further studies shall aim to eliminating (reducing) inherent disadvantages of pre- dictive control and semi-linear contr ol, synthesizing these approaches together . R E F E R E N C E S [1] Andrievsky B. R., Fradkov A. L. Control of Chaos: Methods and Applications. I. Methods, A vtomat. i T elemekh., (2003), no. 5, 3-45. [2] Bartuccelli M., Constantin P ., Doering C.R., Gibbon J.D., Gisselfalt M., Hard turbulence in a finite dimensional dynamical system, Phys. Lett. A 142 (6–7) (1987) 349–356. [3] Chen G., Dong X. Fr om chaos to order: Methodologies, Perspectives and Application. W orld Scientific, Singapore (1999) [4] Davidchack R.L.„ Lai Y .-C., Klebanoff A., Bollt E.M., T owards complete detection of unstable periodic orbits in chaotic systems, Phys. Lett. A 287 (2001), 99–104. [5] Devaney R L. An Introduction to Chaotic Dynamical Systems. New Y ork: Addison-W esley Publ. Co., Second Edition., (1993) [6] Dmitrishin D., Hagelstein P ., Khamitova A., and Stokolos A. Limitations of Robust Stability of a Linear Delayed Feedback Control, SIAM J. Contr ol Optim. 56, (2018), 148-157. [7] Dmitrishin D. and Khamitova A. Methods of harmonic analysis in nonlinear dynamics, Comptes Ren- dus Mathematique, V olume 351, Issues 9-10, 367 - 370 (2013) [8] Dmitrishin D., Khamitova A. and Stokolos A. Fejér polynomials and chaos, Springer Proceedings in Mathematics and Statistics, 108 (2014), 49–75. [9] Dmitrishin D., Skrinnik I., Lesaja G., Stokolos A. A new method for finding cycles by semilinear con- trol, Physics Letters A, 383 (2019), 1871 – 1878. 24 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS [10] Galias Z. Rigor ous investigations of Ikeda map by means of interval arithmetic. Nonlinearity , (2002) 15:1759-1779. [11] Jackson E.A. Perspectives of Nonlinear Dinamics. V ol. I, II, - Cambridge Univ . Press, Cambridge, 1980, 1990 Chaos II, ed. Hao Bai-Lin. - W orld Sci., (1990) [12] Kittel A, Parisi J, Pyragas K. Delayed feedback-control of chaos by self-adapted delay-time. Phys Lett A 1995;198:433–6. [13] Kuntsevich A.V ., Kuntsevich V .M. Estimates of Stable Limit Cycles of Nonlinear Discrete Systems, Journal of Automation and Information Sciences, V olume 44, Issue 9, (2012), 1-10 [14] Kuntsevich A.V ., Kuntsevich V .M. Invariant Sets for Families of Linear and Nonlinear Discrete Systems with Bounded Disturbances, Automation and Remote Control, V ol. 73, No. 1, (2012), 83-96 [15] Lesaja G., Potra F . Adaptive full newton-step infeasible interior-point method for suf ficient horizontal LCP , Optimization Methods and Software, 21(1), (2018), doi: 10.1080/10556788.2018.1546857 [16] Miller J.R., Y orke J.A. Finding all periodic orbits of maps using Newton methods: sizes of basins. Physica D (2000);135:195-211. [17] Morgul O. Further stability results for a generalization of delayed feedback control, Nonlinear Dy- namics, 1-8 (2012) [18] Morgul O. On the stability of delayed feedback controllers, Phys. Lett. A 314 (2003) 278–285. [19] Ott E., Grebodgi C., Y orke J.A. Controlling chaos. Phys. Rev . Lett. 64, 1196-1199 (1990) [20] Polyak B. T . Stabilizing chaos with pr edictive control, Automation and Remote Control.66 (11), (2005), 1791-1804 [21] Polyak B.T ., Gryazina E.N., Iterations of perturbed tent maps with applications to chaos contr ol, IF AC Proceedings, V olume 39, Issue 8, 2006, pp 125-129. [22] Pyragas K. Continuous control of chaos by self contr olling feedback. Phys. Rev . Lett. A 170, 421-428 (1992) [23] Sprott, J. C. Chaos and T ime-Series Analysis, Oxford University Pr ess, Oxford, V ol. 69 (2003) [24] Shalby L., Predictive feedback control method for stabilization of continuous time systems. Advances in Systems Science and Applications. 17 (2017), pp 1-13. [25] Ushio T . Limitation of delayed feedback control in nonlinear discrete-time systems. IEEE T rans Cir cuits Syst I 1996;43:815–6. [26] Ushio T ., Y amamoto, S.: Pr ediction-based control of chaos. Phys. Letts. A. 264(1):439-446(1999) [27] V ieira de S.M., Lichtenberg A.J. Contr olling chaos using nonlinear feedback with delay . Phys. Rev . E 54, 1200-1207 (1996) [28] Y pma T .J.. Historical Development of the Newton-Raphson Method. SIAM Rev ., (1995) 37:531-551. [29] Zhu J, T ian YP . Necessary and sufficient conditions for stabilizability of discrete-time systems via de- layed feedback control. Phys Lett A 2005;343:95–107. A VERAGE PREDICTIVE CONTROL 25 A P P E N D I X 6.1. The Experiments Python Code. [3]: # -*- coding: utf-8 -*- """ @author: Emil """ ############################################################ # Generalized Predictive Control ########################################################### import numpy as np import datetime import matplotlib.pyplot as plt from decimal import Decimal, getcontext, setcontext, ExtendedContext #precision setcontext(ExtendedContext) getcontext() . prec = 250 EPSILON = Decimal( 1e-250 ) def cos (x): """Return the cosine of x as measured in radians. >>> print cos(Decimal(’0.5’)) 0.8775825618903727161162815826 >>> print cos(0.5) 0.87758256189 >>> print cos(0.5+0j) (0.87758256189+0j) """ getcontext() . prec += 2 i, lasts, s, fact, num, sign = 0 , 0 , 1 , 1 , 1 , 1 while s != lasts: lasts = s i += 2 fact *= i * (i -1 ) num *= x * x sign *= -1 s += num / fact * sign getcontext() . prec -= 2 return + s 26 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS def sin (x): """Return the sine of x as measured in radians. >>> print sin(Decimal(’0.5’)) 0.4794255386042030002732879352 >>> print sin(0.5) 0.479425538604 >>> print sin(0.5+0j) (0.479425538604+0j) """ getcontext() . prec += 2 i, lasts, s, fact, num, sign = 1 , 0 , x, 1 , x, 1 while s != lasts: lasts = s i += 2 fact *= i * (i -1 ) num *= x * x sign *= -1 s += num / fact * sign getcontext() . prec -= 2 return + s ######### Abstract Map ############## class Map : def __init__ ( self , name, period, theta, niv, initmode, xaxis = ’x’ , ␣ , → yaxis = ’y’ ): self . name = name self . T = period self . t1 = theta self . NIV = niv self . xaxis = xaxis self . yaxis = yaxis #create x and y arrays for results (size T+1 x NIV) self . x = [[Decimal( 0.0 )] * self . NIV for j in range ( self . T +1 )] self . y = [[Decimal( 0.0 )] * self . NIV for j in range ( self . T +1 )] self . foundcycle = [ False ] * self . NIV self . init(initmode) self . save_ini() def mapname ( self ): A VERAGE PREDICTIVE CONTROL 27 return self . name def init ( self , initmode): #override return def save_ini ( self ): self . inix = [Decimal( 0.0 )] * self . NIV self . iniy = [Decimal( 0.0 )] * self . NIV for j in range ( self . NIV): self . inix[j] = self . x[ 0 ][j] self . iniy[j] = self . y[ 0 ][j] def fx ( self ,x,y): #override pass def fy ( self ,x,y): #override pass def g ( self , x,y): x1 = x y1 = y for i in range ( self . T): x2 = self . fx(x1,y1) y2 = self . fy(x1,y1) x1 = x2 y1 = y2 return (x1,y1) def run ( self , iterations, stopwhenfound = True ): #perform T+1 initial iterations for i in range ( self . T): for j in range ( self . NIV): self . x[i +1 ][j] = self . fx( self . x[i][j], self . y[i][j]) self . y[i +1 ][j] = self . fy( self . x[i][j], self . y[i][j]) #perform it circularly a few more times, recursively (just in ␣ , → case) for repeat in range ( 3 ): #init first positions for j in range ( self . NIV): self . x[ 0 ][j] = self . fx( self . x[ self . T][j], self . y[ self . , → T][j]) self . y[ 0 ][j] = self . fy( self . x[ self . T][j], self . y[ self . , → T][j]) #perform T+1 initial iterations for i in range ( self . T): for j in range ( self . NIV): 28 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS self . x[i +1 ][j] = self . fx( self . x[i][j], self . y[i][j]) self . y[i +1 ][j] = self . fy( self . x[i][j], self . y[i][j]) #use averaging, repeat PERIOD_ITERATIONS multiple of periods found = False for repeat in range (iterations): #init first positions for j in range ( self . NIV): (xg,yg) = self . g( self . x[ self . T][j], self . y[ self . T][j]) self . x[ 0 ][j] = self . fx(( self . t1 / ( self . t1 +1 )) * self . , → x[ self . T][j] + ( 1/ ( self . t1 +1 )) * xg, ( self . t1 / ( self . t1 +1 )) * self . , → y[ self . T][j] + ( 1/ ( self . t1 +1 )) * yg) self . y[ 0 ][j] = self . fy(( self . t1 / ( self . t1 +1 )) * self . , → x[ self . T][j] + ( 1/ ( self . t1 +1 )) * xg, ( self . t1 / ( self . t1 +1 )) * self . , → y[ self . T][j] + ( 1/ ( self . t1 +1 )) * yg) #perform T+1 initial iterations for i in range ( self . T): for j in range ( self . NIV): (xg,yg) = self . g( self . x[i][j], self . y[i][j]) self . x[i +1 ][j] = self . fx(( self . t1 / ( self . t1 +1 )) * self . , → x[i][j] + ( 1/ ( self . t1 +1 )) * xg, ( self . t1 / ( self . t1 +1 )) * self . y[i][j] + ␣ , → ( 1/ ( self . t1 +1 )) * yg) self . y[i +1 ][j] = self . fy(( self . t1 / ( self . t1 +1 )) * self . , → x[i][j] + ( 1/ ( self . t1 +1 )) * xg, ( self . t1 / ( self . t1 +1 )) * self . y[i][j] + ␣ , → ( 1/ ( self . t1 +1 )) * yg) if ( not self . foundcycle[j]): dx = np . abs( self . x[i +1 ][j] - self . x[i +1- self . , → T][j]) dy = np . abs( self . y[i +1 ][j] - self . y[i +1- self . , → T][j]) if (dx < EPSILON and dy < EPSILON): self . foundcycle[j] = True found = True print ( self . name) print ( ’Found ’ , self . T, ’-cycle: initial value ␣ , → = ’ , j, ’ (’ , repeat, ’th iteration)’ , sep = ’’ ) print ( ’x = ’ , self . x[i +1 ][j]) print ( ’y = ’ , self . y[i +1 ][j]) if (stopwhenfound and found): break return found def plot ( self ,plotinisystem = True ): A VERAGE PREDICTIVE CONTROL 29 for j in range ( self . NIV): bv = self . foundcycle[j] if ( not bv): continue plt . ion(); fig1 = plt . figure() ax1 = fig1 . add_subplot( 111 ) if (plotinisystem): minrepeat = 200 // self . T + 1 for k in range ( self . NIV): x = self . inix[k] y = self . iniy[k] for count in range (minrepeat): for i in range ( self . T): ax1 . plot(x, y, marker = ’x’ , color = ’grey’ ) xx = x x = self . fx(x,y) y = self . fy(xx,y) for i in range ( self . T): ax1 . plot( self . x[i][j], self . y[i][j], ’b.’ ) ax1 . set_xlabel( self . xaxis) ax1 . set_ylabel( self . yaxis) #t = self.mapname() + ’ Map: T = ’ + str(self.T) + ’; initial ␣ , → value ’ + str(j) t = self . mapname() + ’ Map, ’ + str ( self . T) + ’-cycle’ ax1 . set_title(t) ############# Mappings ######################## ## Logistic mapping ## class Logistic (Map): h = Decimal( 3.99 ) def fx ( self ,x,y): return (y) def fy ( self ,x,y): return ( self . h * y * ( 1 - y)) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 0.5 ) self . y[ 0 ][ 0 ] = self . fy( self . x[ 0 ][ 0 ], self . x[ 0 ][ 0 ]) self . x[ 0 ][ 1 ] = Decimal( 0.1 ) self . y[ 0 ][ 1 ] = self . fy( self . x[ 0 ][ 1 ], self . x[ 0 ][ 1 ]) 30 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS ## Triangular mapping ## class Triangular (Map): h = Decimal( 0.99 ) def fx ( self ,x,y): return (y) def fy ( self ,x,y): return ( self . h * ( 1 - np . abs( 2 * y - 1 ))) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 0.5 ) self . y[ 0 ][ 0 ] = self . fy( self . x[ 0 ][ 0 ], self . x[ 0 ][ 0 ]) self . x[ 0 ][ 1 ] = Decimal( 0.1 ) self . y[ 0 ][ 1 ] = self . fy( self . x[ 0 ][ 1 ], self . x[ 0 ][ 1 ]) ## Burgers mapping ## class Burgers (Map): def fx ( self ,x,y): a = Decimal( 0.75 ) return (a * x - y **2 ) def fy ( self ,x,y): b = Decimal( 1.75 ) return (b * y + x * y) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( -1.7 ) self . y[ 0 ][ 0 ] = Decimal( 0.2 ) self . x[ 0 ][ 1 ] = Decimal( -0.5 ) self . y[ 0 ][ 1 ] = Decimal( 0.5 ) ## Tinkerbell mapping ## class Tinkerbell (Map): def fx ( self ,x,y): a = Decimal( 0.9 ) b = Decimal( -0.6 ) return (x **2 - y **2 + a * x + b * y) def fy ( self ,x,y): c = Decimal( 2.0 ) d = Decimal( 0.5 ) return ( 2 * x * y + c * x + d * y) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 0.0 ) self . y[ 0 ][ 0 ] = Decimal( -0.3 ) A VERAGE PREDICTIVE CONTROL 31 self . x[ 0 ][ 1 ] = Decimal( -0.5 ) self . y[ 0 ][ 1 ] = Decimal( -0.5 ) ## Gingerbredman mapping ## class Gingerbredman (Map): def fx ( self ,x,y): return ( 1 + np . abs(x) - y) def fy ( self ,x,y): return (x) def init ( self , initmode): #override #init first positions for j in range ( self . NIV): self . x[ 0 ][j] = Decimal( -2.09 + 1.5* (j +1 ) /12.0 ) self . y[ 0 ][j] = Decimal( -2.09 + 1.5* (j +1 ) /12.0 ) ## PreyPredator mapping ## class PreyPredator (Map): def fx ( self ,x,y): a = Decimal( 3.0 ) b = Decimal( 5.0 ) return (x * np . exp(a * ( 1 - x) - b * y)) def fy ( self ,x,y): c = Decimal( 5.0 ) return (x * ( 1 - np . exp( - c * y))) def init ( self , initmode): #override #init first positions for j in range ( self . NIV): self . x[ 0 ][j] = Decimal( 0.02 + (j +13 ) /19.0 ) self . y[ 0 ][j] = Decimal( 0.1 + (j +13 ) /11.0 ) ## DelayedLogistic mapping ## class DelayedLogistic (Map): def fx ( self ,x,y): h = Decimal( 2.27 ) return (h * x * ( 1 - y)) def fy ( self ,x,y): return (x) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 0.1 ) self . y[ 0 ][ 0 ] = Decimal( 0.1 ) self . x[ 0 ][ 1 ] = Decimal( 0.05 ) self . y[ 0 ][ 1 ] = Decimal( 0.025 ) ## Henon mapping ## 32 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS class Henon (Map): def fx ( self ,x,y): a = Decimal( -1.400000001 ) return ( 1 + a * x ** 2 + y) def fy ( self ,x,y): b = Decimal( 0.30000002 ) return (b * x) def init ( self , initmode): #override #init first positions for j in range ( self . NIV): self . x[ 0 ][j] = Decimal( -1.0 + j /9.0 ) self . y[ 0 ][j] = Decimal( 0.3 ) * self . x[ 0 ][j] ## ElhadjSprott mapping ## class ElhadjSprott (Map): def fx ( self ,x,y): a = Decimal( -4.0 ) b = Decimal( 0.9 ) return ( 1 + a * sin(x) + b * y) def fy ( self ,x,y): return (x) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 10.0 ) self . y[ 0 ][ 0 ] = Decimal( 10.0 ) self . x[ 0 ][ 1 ] = Decimal( 0.0 ) self . y[ 0 ][ 1 ] = Decimal( 0.0 ) ## Ikeda mapping ## class Ikeda (Map): def fx ( self ,x,y): k = Decimal( 0.9 ) a = Decimal( 0.4 ) b = Decimal( 6.0 ) ff = a - b / ( 1 + x **2 + y **2 ) return ( 1 + k * (x * cos(ff) - y * sin(ff))) def fy ( self ,x,y): k = Decimal( 0.9 ) a = Decimal( 0.4 ) b = Decimal( 6.0 ) ff = a - b / ( 1 + x **2 + y **2 ) return (k * (x * sin(ff) + y * cos(ff))) def init ( self , initmode): #override #init first positions A VERAGE PREDICTIVE CONTROL 33 self . x[ 0 ][ 0 ] = Decimal( 0.1 ) self . y[ 0 ][ 0 ] = Decimal( -1.0 ) self . x[ 0 ][ 1 ] = Decimal( 1.0 ) self . y[ 0 ][ 1 ] = Decimal( 0.0 ) ## Lozi mapping ## class Lozi (Map): def fx ( self ,x,y): a = Decimal( -1.7 ) b = Decimal( 0.5 ) return ( 1 + a * np . abs(x) + b * y) def fy ( self ,x,y): return (x) def init ( self , initmode): #override #init first positions #self.x[0][0] = Decimal(-0.5) #self.y[0][0] = Decimal(-0.5) #self.x[0][1] = Decimal(0.5) #self.y[0][1] = Decimal(0.5) #for j in range(self.NIV): # self.x[0][j] = Decimal(0.5 * (-1)**j + j/2.0) # self.y[0][j] = Decimal(-0.5 * (-1)**j + j/2.0) self . x[ 0 ][ 0 ] = Decimal( 0.5 ) self . y[ 0 ][ 0 ] = Decimal( 0.0 ) self . x[ 0 ][ 1 ] = Decimal( -0.5 ) self . y[ 0 ][ 1 ] = Decimal( -0.5 ) ## Holmes mapping ## class Holmes (Map): def fx ( self ,x,y): return (y) def fy ( self ,x,y): a = Decimal( -0.2 ) b = Decimal( 2.77 ) return (a * x + b * y - y **3 ) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 0.1 ) self . y[ 0 ][ 0 ] = Decimal( 0.1 ) self . x[ 0 ][ 1 ] = Decimal( -0.1 ) self . y[ 0 ][ 1 ] = Decimal( 0.1 ) ## Multihorseshoe mapping ## class Multihorseshoe (Map): 34 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS def fx ( self ,x,y): ak = Decimal( 3.0 ) return (x * np . exp(ak - Decimal( 0.8 ) * x - Decimal( 0.2 ) * y)) def fy ( self ,x,y): bk = Decimal( 3.0 ) return (y * (Decimal( 0.2 ) * x + Decimal( 0.8 ) * y) * np . exp(bk - ␣ , → Decimal( 0.2 ) * x - Decimal( 0.8 ) * y)) def init ( self , initmode): #override #init first positions self . x[ 0 ][ 0 ] = Decimal( 3.0 ) self . y[ 0 ][ 0 ] = Decimal( 6.0 ) #### End customized mappings ################################### success = False #choose mapping(s) from above allmaps = [ # Param:(name, period, theta, niv, initmode) Logistic( "Logistic" , 101 , Decimal( 2e24 ), 2 , 0 , ’x[n]’ , ’x[n+1]’ ), ␣ , → #tested: precision = 250 Triangular( "Triangular" , 101 , Decimal( 64e28 ), 2 , 0 , ’x[n]’ , ␣ , → ’x[n+1]’ ), #tested: precision = 250 Burgers( "Burgers" , 28 , Decimal( 680 ), 2 , 0 ), #tested: precision = 250 Burgers( "Burgers" , 50 , Decimal( 10000 ), 2 , 0 ), #tested: precision = 250 Burgers( "Burgers" , 101 , Decimal( 16e7 ), 2 , 0 ), #tested: precision = 250 Tinkerbell( "Tinkerbell" , 28 , Decimal( 100 ), 2 , 0 ), #tested: precision ␣ , → = 250 Tinkerbell( "Tinkerbell" , 50 , Decimal( 2000 ), 2 , 0 ), #tested: precision ␣ , → = 250 Tinkerbell( "Tinkerbell" , 101 , Decimal( 8e8 ), 2 , 0 ), #tested: precision ␣ , → = 250 Gingerbredman( "Gingerbredman" , 28 , Decimal( 30 ), 2 , 0 ), #tested: ␣ , → precision = 250 Gingerbredman( "Gingerbredman" , 50 , Decimal( 100 ), 2 , 0 ), #tested: ␣ , → precision = 250 Gingerbredman( "Gingerbredman" , 101 , Decimal( 4e5 ), 2 , 0 ), #tested: ␣ , → precision = 250 PreyPredator( "Prey-predator" , 28 , Decimal( 350 ), 15 , 0 ), #tested: ␣ , → precision = 250, 8th ini value PreyPredator( "Prey-predator" , 50 , Decimal( 19500 ), 15 , 0 ), #tested: ␣ , → precision = 250, 13th ini value, iteration 112 PreyPredator( "Prey-predator" , 101 , Decimal( 1e8 ), 2 , 0 ), #tested: ␣ , → precision = 250 (206th iteration) A VERAGE PREDICTIVE CONTROL 35 DelayedLogistic( "Delayed Logistic" , 101 , Decimal( 1e5 ), 2 , 0 ), #tested: , → precision = 250 Henon( "Henon" , 28 , Decimal( 15000 ), 11 , 0 ), Henon( "Henon" , 50 , Decimal( 100000 ), 11 , 0 ), Henon( "Henon" , 101 , Decimal( 1e16 ), 11 , 0 ), #tested: precision = 250 Henon( "Henon" , 1001 , Decimal( 5e174 ), 11 , 0 ), #tested: precision = 250 ElhadjSprott( "Elhadj-Sprott" , 101 , Decimal( 1e28 ), 2 , 0 ), #tested: ␣ , → precision = 250 # ElhadjSprott("Elhadj-Sprott", 1001, Decimal(1.5e317), 2, 0), #not ␣ , → tested: precision = 355 Lozi( "Lozi" , 28 , Decimal( 4000 ), 2 , 0 ), #tested: precision = 250 Lozi( "Lozi" , 50 , Decimal( 9.9e7 ), 2 , 0 ), #tested: precision = 250 Lozi( "Lozi" , 101 , Decimal( 64e16 ), 2 , 0 ), #tested: precision = 250 Lozi( "Lozi" , 601 , Decimal( 2e120 ), 2 , 0 ), #tested: precision = 250 Lozi( "Lozi" , 1001 , Decimal( 1e203 ), 2 , 0 ), #tested: precision = 250 Ikeda( "Ikeda" , 28 , Decimal( 9000 ), 2 , 0 ), #tested: precision = 250 Ikeda( "Ikeda" , 50 , Decimal( 1.7e7 ), 2 , 0 ), #tested: precision = 250 Ikeda( "Ikeda" , 101 , Decimal( 1e22 ), 2 , 0 ), #tested: precision = 250 Ikeda( "Ikeda" , 1001 , Decimal( 3.8e225 ), 2 , 0 ), #tested: precision = 250 Holmes( "Holmes" , 101 , Decimal( 2e28 ), 2 , 0 ), #tested: precision = 250 Multihorseshoe( "Multihorseshoe" , 1001 , Decimal( 1.5e187 ), 1 , 0 ), ␣ , → #tested: precision = 250 ] success = False #process all selected for map in allmaps: if ( map . mapname == "Elhadj-Sprott" and map . T == 1001 ): getcontext() . prec = 355 #special case EPSILON = Decimal( 1e-355 ) #run success = map . run( 250 ) #plot map . plot() if ( map . mapname == "Elhadj-Sprott" and map . T == 1001 ): getcontext() . prec = 250 #all others EPSILON = Decimal( 1e-250 ) print ( ’all done’ ) print (datetime . datetime . now()) 36 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS Logistic Found 101-cycle: initial value = 1 (16th iteration) x = 0. , → 6208441673334530510193712421079700126902660144923404119694819796097082349 11938072808304801042336167995102899637104914594667846339596919479775167434867788 53219666198030338615187822832999207491246905623778821254731576093857494224224021 47797194242586651 y = 0. , → 9392327820137228002754955380432561475641787058732521657996624880704328735 15467180570529462820821955349167591152288812597184499607804672705249413697803668 56813350092378812688074975048458091890730194638857008904876155355625587374146225 25168346415796463 Triangular Found 101-cycle: initial value = 1 (34th iteration) x = 0. , → 2575821524435856633314993107862728612361611569741225558276447680309968781 66736561270986662776665759766406588690503984057893648676945364568939371331611044 26296659078376849265035286785034022475383981868424947884934771167584592624272785 57692563906927813 y = 0. , → 5100126618382996088207904533508069557524375761355335745926115557897996161 83460975127533062975652589982855523697139349840000029513594739145698438795902719 74648985350145959294070589255474085521410750837717614062091114964050749692343686 93672987153253312 Triangular Found 101-cycle: initial value = 0 (34th iteration) x = 0. , → 3491506884527178899645588909615486544805272152132746957003654283560059448 42118842291992898645167486956507230404107157882186720615311001369810781530647687 48893632543471185619960471849404214435590805900281979612665697237017739807202735 84487809135892385 y = 0. , → 6913183631363814159276644699609515631517289581215740207786655006524859851 19741442264159723262782904340857125235285395747169726024043215833672570544007405 97602054639102683659289046757076905760997417307051156782730733208325982589440907 38225106729986306 Burgers Found 28-cycle: initial value = 1 (153th iteration) x = -0. , → 189820353603430385414996778555225514814348408752963755155207125274978477 15333431251975738593113406311985437796728895988541116252960519152805568267712563 54972920544128738217322521049261178731159336344099910811562337947588858739304417 757816610041919377 A VERAGE PREDICTIVE CONTROL 37 y = -0. , → 000160108295377578425762294517627034914056637559336515584204233440484163 28071117687003557806801696435117889246075992526577059674099320121303730813631539 41520332460486354035523234989755186957539356654000125036418934366557803210580601 107118787448732162044 Burgers Found 28-cycle: initial value = 0 (153th iteration) x = -0. , → 045046925767218743446435475467218503555332898342324281888204233114749501 62296083072969099053154657624218010672449836251767671058828233865234782251246729 64907233610810381871972657083998128756241569348215202036647586256404571905150970 4505871532145621311 y = 0. , → 0018622570870654392363625588935676651829530095228399377525197019997797163 60282999589850411610001744527104397726632581744900784003486653189103246283615124 68947748911618394387899148405202316627434033260581296249284236655589110968760832 1432693776165750676 Burgers Found 50-cycle: initial value = 0 (57th iteration) x = -0. , → 017817577260542359802315327228488443365556590968293468661242421348877840 50005676410670163193895940462991170012439546205856631936126782802178169581551609 06952948930100845519242962095017879742418948716533080498143539486406102273614427 9377826562830292326 y = -0. , → 005708247435297464406137161753997573275220045959859992343092833723078136 39972652027049371821227814523650373328923032043151564155985745585999102963741756 85801483232212841755103853345694770561635600980254416878900267361168267043454603 30385432006023952171 Burgers Found 101-cycle: initial value = 0 (20th iteration) x = -0. , → 991286211441260650746717244293092041768562287757457875973371354386316592 95866818056958481067770350544245850755740008343373668572239744628660758245902372 46612598138867397562679172858507091629067261746609150656869257598282536923022815 389117352292511784 y = -0. , → 000179865945389048499356746436141587376608956128073922933204009694736066 61362022579828900519159308129070119988533380158408089600233653981565148246225015 33554677137277750632099631787844034749562461545577756211308504457544695006943312 436659294495803100011 Tinkerbell Found 28-cycle: initial value = 1 (37th iteration) 38 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS x = 0. , → 1652699415532249905525004948040007221237083079395887690837959586816518844 84178724666819675366586777459776611879395085884379404117097949201133124754116630 50672895457427167599490465225303468676389482234562828860417261132941537281743352 82751848397367355 y = 0. , → 1643681389595992098746955777897269813494538852567047980679089895866921500 84536904125281332635524287237255555391712116584927667827327756330611034346551563 76542590042817275046986359645530774083737316318877994904944403989072937791770847 66564755271282848 Tinkerbell Found 50-cycle: initial value = 1 (31th iteration) x = 0. , → 1643396243845003512982312095785460058297749540417345545374819517662064751 39661757439304419114962721213688271604521582467911398290192539215346548275939964 07783619051949491362210281307472361358710073127504730473226234458804168081154491 10796236481740895 y = 0. , → 1253676436843538676204139706175187961211810443722066059679288488706666204 38119994090759985394326006878254899470797162154286480035266453993591892945006448 82811931752656028606915352568030358416352486299986168436281266968133147180985470 75837187477225340 Tinkerbell Found 101-cycle: initial value = 0 (11th iteration) x = -0. , → 003512998306135684573245899575553101958214113166274285463019653362821012 00310431781731979055622687764644046708338630352399383512496092021969581797054053 17660055378859438615810744934675551055343144133991068021196156437416657023635980 228436600111693776 y = -0. , → 325683068982302430220086824513764205064773228250716242837063500280318610 12985442592047614258829952300870748714696707386780737735948630172886318726530546 55949575967814546864681875893745412725987276725497415431715642760540499830248835 245415392952288302 Tinkerbell Found 101-cycle: initial value = 1 (11th iteration) x = -0. , → 114468818982283984622986417327106231817790322496221108184728748020434921 81877373496588743856392786956447481181772913636089530370178653527722814252279105 97095236254211764216388842689102855780298883767823513649681201072859972036940830 853673088346092732 y = -0. , → 543433742963811201237141426023006773464896805604270147826010292539582436 A VERAGE PREDICTIVE CONTROL 39 02537498132296767387709685404195760920208702053953453624176908409301354851640969 06558232863776852767005716268487525140333702799481819819465457666389682836425949 186971201894101448 Gingerbredman Found 28-cycle: initial value = 0 (126th iteration) x = 1. , → 1818181818181818181818181818181818181818181818181818181818181818181818181 81818181818181818181818181818181818181818181818181818181818181818181818181818181 81818181818181818181818181818181818181818181818181818181818181818181818181818181 8181818181818182 y = -0. , → 090909090909090909090909090909090909090909090909090909090909090909090909 09090909090909090909090909090909090909090909090909090909090909090909090909090909 09090909090909090909090909090909090909090909090909090909090909090909090909090909 0909090909090909229 Gingerbredman Found 50-cycle: initial value = 1 (100th iteration) x = 5. , → 1734104046242774566473988439306358381502890173410404624277456647398843930 63583815028901734104046242774566473988439306358381502890173410404624277456647398 84393063583815028901734104046242774566473988439306358381502890173410404624277456 6473988439306359 y = 3. , → 8092485549132947976878612716763005780346820809248554913294797687861271676 30057803468208092485549132947976878612716763005780346820809248554913294797687861 27167630057803468208092485549132947976878612716763005780346820809248554913294797 6878612716763006 Gingerbredman Found 101-cycle: initial value = 0 (47th iteration) x = 1. , → 5201913339864814799568592904835217308974749512197129990202777800647110642 74717403653787573170430501469583329902933403587923894519318640244354247795625005 14559989461811415822102203963346862830656249228160015807282876266846694054979705 7540156261577600 y = 2. , → 3412183133958489416530136749462799371001868881881725299062265875204794875 80580094349719667717741205140660118719280768629129858475420498423388192289009821 92107884705630521228686925236491771156648526711838172941554218156969612145262343 2650272099322427 Prey-predator Found 28-cycle: initial value = 8 (40th iteration) x = 0. , → 5953755523758989238023479395418373846102282148598660226863639433586297547 40 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS 75303202046901694863932931387986206835529295854970643067639391183399683415105918 60487883803270094929927205097690227690867341023142832727163395002379474373053421 36442698906206000 y = 0. , → 0211059237258230412444800968949072001501837832485441049486828582258614143 42177134129146694817179375072914085201833641590728926071358290731923139180518762 26206862755324004907441229516056836992499650472336985928502183690576800281561777 448294032851423658 Prey-predator Found 50-cycle: initial value = 13 (109th iteration) x = 0. , → 7142105897277822691465106056672195672771983736022319507011869671712743210 61818513424495560913110214953367927639717553246372671682064189361326057579592417 21816835144125351174438466953527401867118380852979182324948372142957088967229892 76864050793796989 y = 0. , → 0177136810593335252633126015980846540605489473687784254294450792228692499 25060994735838044243467821404541369659979550131508032750268753481221884836071262 57266705880610187800636723418180668868536502115129783620704838194055316239928073 667471166960210315 Prey-predator Found 101-cycle: initial value = 0 (206th iteration) x = 1. , → 9260259093313495184502822115024639129044551920664860718565403695867826398 87223418260288745024327723658316935691320149500153577582620674080718933225519751 07029759204174711903855679027975374036261434887090622240021346220833167730226530 1895640391270805 y = 0. , → 0819656977491978025534665153704321459460247600824057371334659066569499929 19415382515844192482324280511042618267841590667062343839178532299590974140239671 94888583153397977676296702313914798330586647581179023264426223618440430042625474 921717452656551351 Delayed Logistic Found 101-cycle: initial value = 0 (16th iteration) x = 0. , → 1678748017303368148664731739230001516170520621102573342694914705791203350 53577270755130828117125757605049755725900181055839625047853336817362793758180829 52579966265424136881617874494978285372762605727394331816921099367231742143336568 64795807078531509 y = 0. , → 0770151302304203122539515367646238602366665192317201462953476921443384306 53538219945941057871032141589587495130780627635448059811398788765786918586297107 04511491007198288576286401514236398744733174139065947038678134727354930003981679 A VERAGE PREDICTIVE CONTROL 41 043827466684722322 Henon Found 28-cycle: initial value = 9 (17th iteration) x = 0. , → 1225274379717909569407593957713277479981395912599237257370472882802515127 47436818023839554634184358469786556952888130735300916622178202741924882739359890 79654693343833141107877615270270287810400998509935157298686345637766666218125510 42861393886213255 y = 0. , → 2404705748617771006741812644243663912860393192675163045264599241765456761 03384515850118465034030287266830661843908904709768043143666598101547313952460578 98563516789008019787014350333339748567763785342899978071927709003251611994018855 36723147097399276 Henon Found 50-cycle: initial value = 4 (28th iteration) x = 0. , → 3996970575491603269611853889807529449382090970683725111031127401007267040 91852249194344152926298003589922172641014310499870988519799793166918480282404881 87851128856696125919360321543380942906435153189876581689879134409608959793419252 85683214295659066 y = 0. , → 1858157650867404178678987172893942811317962843352428624346445724025625505 17605074642000793084024114216894937466775014973688795528719606656964743957342273 19143800603093187504460969387811699454853978276110087969251328896688587849276814 04730067731535688 Henon Found 101-cycle: initial value = 3 (5th iteration) x = -1. , → 060258444222247866742638810996174712237994304086139058405204584406574936 10054937610707398549833943592413859024041951723784575259599584624319112121775558 55940576967491549722929584761057613335208353202151315618354461483363894542771233 33630165258629542 y = 0. , → 3677063137022115095162724391212992569158284967816822516801335792604248299 48163697837362397172747931265759383366953570511425274031170629332405290054885386 44476645017240897744266483387558067298357358481009906146867205897435653992237195 49692505945369248 Henon Found 101-cycle: initial value = 1 (5th iteration) x = -1. , → 223394105864755510373417002250700700832245916019699990570706239332857579 35581915968796030648831218048575290254120428806531147042438139830363159835921516 91213560975389758239217860632792518460628622525689127569936865565764531154384838 42 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS 41547443307246781 y = 0. , → 3735391160921831697195819411098258360079937910920758863707998430802931324 96372788046578187596273640196530201700009201840176042749307272301258250663582423 92324454180182261250594267153541212739460610927208459456202155691936723039019124 77846578349192982 Henon Found 1001-cycle: initial value = 8 (1th iteration) x = -0. , → 592743453771613574925072767996497608118639264643556222066064582174528385 33930070711040456467157275317528377284227451504904426397934492766451996075674066 75590869380828870563915585892488676550872160201589808325840358291695848113390832 198314751325737388 y = -0. , → 278599124740739223552490480783323864825130411431783945940598171923110747 68481062690775860955120055638629720220251760694790281847238344666972576967818309 59962865296988796372494257566312304274418148998461227453299915867965315197632977 391483881135875051 Henon Found 1001-cycle: initial value = 7 (1th iteration) x = 0. , → 8941919732891004964148343848269216565892784644694368028156989856013466207 67661763990194416782686744283837501353224502507172453520468420810727603395288781 23346409446022514275646650956376483675885096786648355097907374892038723451274883 90659895832318884 y = -0. , → 166587525625092390527118759356461277084252076913759235507669550647902490 04959728447290195711916578804533567695850984144216364043179282900874295441944802 74798007921713212081970279826172577369155233406031454311009931313636076648374498 408454518154853189 Elhadj-Sprott Found 101-cycle: initial value = 0 (28th iteration) x = 10. , → 638042667340165574037086832523736931294231649777353960140029079003235466 26466130742235350280124668054958468730422977571505996194661867034950396222843249 69848479617305046067954828394489250017027213523535684858637421669352817809001954 0233031811697283 y = 9. , → 7976244555120301908568785476949660602394491099418407608095174460853620708 85065934500464284216209437311394916480615559604236086522380237763388995451290328 68976966882156120826108555517992730626447110970553913041316708062018449525134378 1709115461733291 Lozi A VERAGE PREDICTIVE CONTROL 43 Found 28-cycle: initial value = 0 (120th iteration) x = 0. , → 6715218431136381974485379050843528421662407309957097024023915199465078077 76245989403195320206207522317731542254977643461754862064942661529593558184809541 64310321666952963490247821623265262309305412318747764733800278036909952460261337 84997805396061125 y = -0. , → 458193561596474123291808927822656067571143717038126774970696812554112537 71130047339666191318901769675790596255554012898463660372941701290107491986543315 87263734579141242673312717268080626029071990480309496362331407056598647344450855 501253645934866244 Lozi Found 50-cycle: initial value = 0 (34th iteration) x = 0. , → 7243138612972183930487886387940489931010042662371382123839134515783729788 27810597373893914575351283081345621642157388105169338607198095013139387558826256 57298139258402453026335440704134831281782899147224146764686651891441214116031302 44524606856164691 y = -0. , → 421592048069018469356537053566885850385300304297589313030242662394345693 17508281837753291463737258533607344417489794663861305640955484555313939640429453 52721313572346663596027470322178613425213009760843183345818536152899884551805340 426751311017044060 Lozi Found 101-cycle: initial value = 0 (7th iteration) x = 1. , → 0279935471366691534344603188283232642084959647976241375394632755600110970 63086524552422840174830317891266535556496267170961374055458396052622143596180475 48004289855650505457236674241535309303372647124700724818806459217959970612420717 4469454086970554 y = 0. , → 0863943028053452768653172895754238752920110467943741271105322465077075763 99418545635229794159042186148863396519183010532361000131682106185264182625128726 24918071501464936525684191835968589631708029744850865563081874610195030360671788 412427755104146957 Lozi Found 601-cycle: initial value = 1 (1th iteration) x = -0. , → 677303452427627896508055914368165636763365583437734260157201148735352859 77902096965779105478423150029270419516364023991263464741198676375604622285945515 97230290766516148580334276339726091881133085710297730114598985869262207931871254 286737940595218300 44 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS y = 0. , → 9239803462416223688824712290328801260835728317838954101919478349525183045 55808647861347773309474018075360575690473762033309020036376266930358537538646706 46914196418521585926533499545537061980664403103785708587979181096627677328586460 42418137098023711 Lozi Found 1001-cycle: initial value = 0 (1th iteration) x = -0. , → 131617250269451507405655236417895104325535663402424630969147088080013679 36723627314750676503214858853487210486379766212312772583446219445417222555423796 51317969140679415718311175941421024012613186996840882673792234970756212020706489 736075642448637349 y = 0. , → 7477154051233377942551663788887827423493296433942507044747582356100178501 22942538129095539994368319536784967739397867846794695981689654450495940228852966 11751137849298555223925203114593802340508628757418158866561499399710926911750209 90139122788672961 Ikeda Found 28-cycle: initial value = 0 (79th iteration) x = 1. , → 4011854198924391287479391443932094588433219419621375330089116293790595040 84511852856534909149094894143575807902223096814885137873856077265927346067420864 80586880926235477705671358391979219437910557297155995900238457318984110007697315 5647603299381155 y = -0. , → 052160829575268621799448640135737366473920398510332449444924751432651696 54121986031279223273823891755774210251131088356267586368594620330212625736807666 80337871277452677616260550657165603733670530418192957819670837509426746954594780 4875470672503084141 Ikeda Found 50-cycle: initial value = 0 (196th iteration) x = 1. , → 1785614536086387507088522807427851283801416010486260342756456563157920523 66358338815395442292236789635057190791589182728573452937881204898672163868731093 92062974417789985835052543266771052009578906071594615817631199152496495642966935 8729123889193085 y = -1. , → 199983994024039868495574156992408632143302494249312907225803455945802732 65151101036790076964584094579358473725875933098233635277199572662073560688231567 54733877543969372111335263593710998037951694330915342548188101959682890306459976 32062714808315172 Ikeda Found 101-cycle: initial value = 0 (11th iteration) A VERAGE PREDICTIVE CONTROL 45 x = 1. , → 2621664717835257387084098668590556481101917958116279497048364940796280035 64261085283177763399869191744030478701485227646322256878341569201076897345500014 73128989313971548200346915874784294808101778588695993392905771040789473268785139 9783082826163767 y = -0. , → 132488738796657124571978486438331496544955067646527762670189035238081194 45797388411889517601779164368600122982278424294010433147031397790570779423842637 79171540776436031191215657354936480428160945189362346451201193788418354293788221 713730646035869555 Ikeda Found 1001-cycle: initial value = 1 (2th iteration) x = 1. , → 4112894130560773250880430953382273104815592378825068591299094417379132603 86563929218988549909460544360426114596378153860079818885788806545266347319634687 28255415975766033921728385239245625628664436926638075023742523965727662642460959 6651334143685892 y = -0. , → 186881957730856360669522421029139840244013727018630446263480977933798152 51276944783656875294342331347003307184214529852940311205390573872096014121981105 19699614738875044012560578388148317663432079279373423138207845269583247640670610 409089629668680995 Ikeda Found 1001-cycle: initial value = 0 (2th iteration) x = 1. , → 1513099706312689328185459311763371777378832181301990045558051927931206159 40907642949932051429447518116421948348122454315783859570071049696677483869416894 99767772601239050311268974830001217523906750055027041492630657324487016074599948 6757284753203324 y = -1. , → 221126110386722130978592080817830894573886645506244755184655690735405788 77848511687106415323303222432015052238376583970485201457328097078412805681790417 66208274953667216968933611569319238451006498751006645748699656937665917708788291 25589582500164099 Holmes Found 101-cycle: initial value = 0 (6th iteration) x = 1. , → 5637030822347211045173865285834111900443612731692169454286218950310653237 61082962840975004387217939157740706408417934839975330699762921923881851268095804 50391465882437179830214790886273016033689600728518986040610712798492617878975100 2934104819249006 y = 0. , → 2810347246457011994936574847299510655538129425364130502653147521295414841 46 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS 89373755738391145711214946321585193609457285040551224742754656644287251714401110 20362038559462669727642274074535846323268888942478143028297963428802101040661565 4254903654441839 Multihorseshoe Found 1001-cycle: initial value = 0 (6th iteration) x = 3. , → 0753840675646298388604991543803516600693282471858613210573387862392795762 53147145066290940867422437246422151371987486692925640745390254473264157951972871 66338696181524422143531944208080649681258843046826741888229877988354070869141022 0130079145171214 y = 0. , → 3546597755462393715479899686148861980759521204156354748133847995460261349 54032251180963251183866364315863145121351987463618461708358704130176132006788589 34415733244953338245847609521508657884829509861178593465110909308211433033386764 58736199942181651 A VERAGE PREDICTIVE CONTROL 47 48 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 49 50 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 51 52 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 53 54 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 55 56 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 57 58 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 59 60 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 61 62 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 63 64 D. DMITRISHIN, I.E. IACOB, AND A. STOKOLOS A VERAGE PREDICTIVE CONTROL 65 [ ]: D E PA RT M E N T O F A P P L I E D M AT H E M AT I C S , O D E S S A N AT I O N A L P O LY T E C H N I C U N I V E R S I T Y , O D E S S A 6 5 0 4 4 , U K R A I N E E-mail address : dmitrishin@opu.ua D E PA RT M E N T O F M AT H E M AT I C A L S C I E N C E S , G E O R G I A S O U T H E R N U N I V E R S I T Y , S TAT E S B O R O , G A 3 0 4 6 0 , U S A E-mail address : ieiacob@GeorgiaSouthern.edu D E PA RT M E N T O F M AT H E M AT I C A L S C I E N C E S , G E O R G I A S O U T H E R N U N I V E R S I T Y , S TAT E S B O R O , G A 3 0 4 6 0 , U S A E-mail address : astokolos@GeorgiaSouthern.edu
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment