An Optimal Control Framework for Online Job Scheduling with General Cost Functions
We consider the problem of online job scheduling on a single machine or multiple unrelated machines with general job/machine-dependent cost functions. In this model, each job $j$ has a processing requirement (length) $v_{ij}$ and arrives with a nonne…
Authors: S. Rasoul Etesami
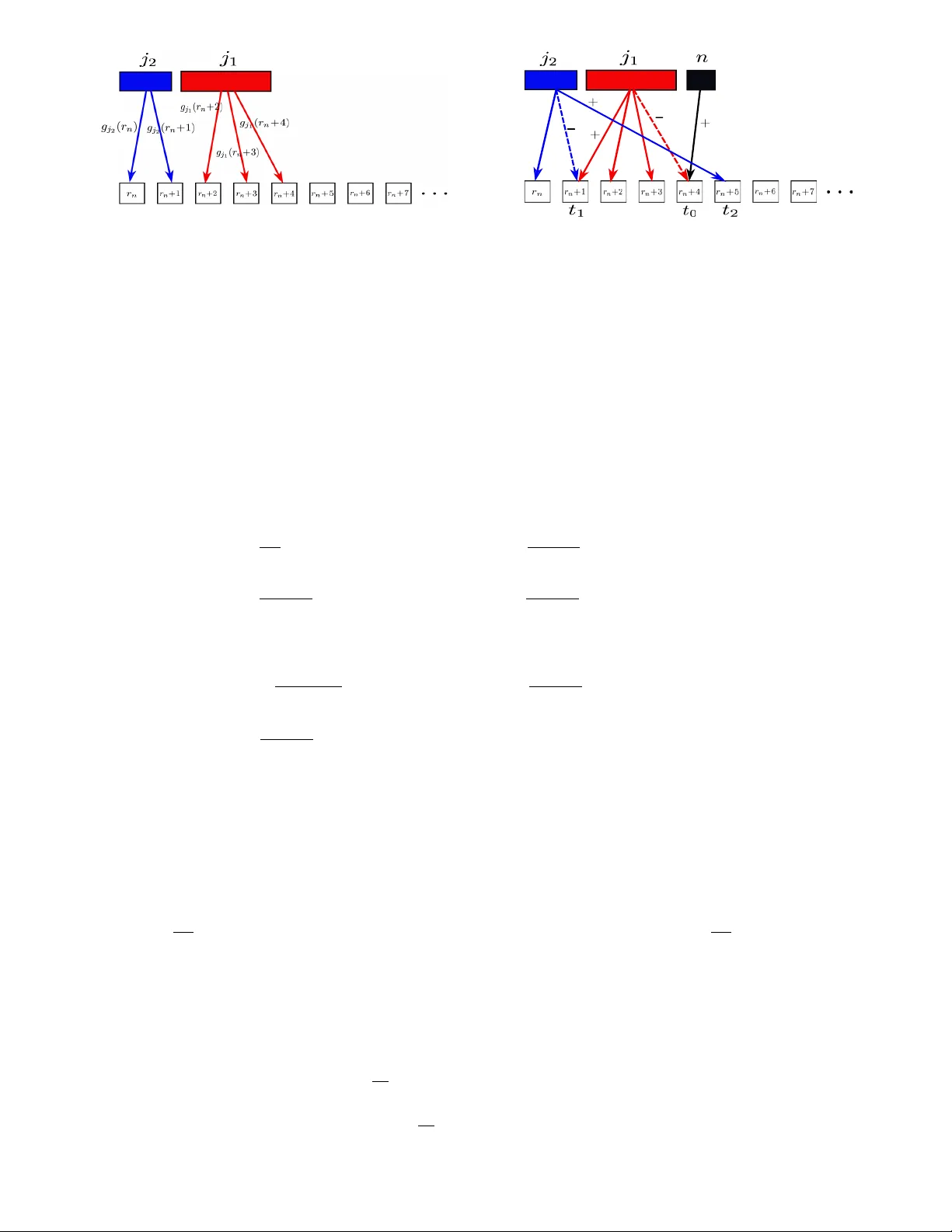
An Optimal Control Frame work for Online Job Scheduling with General Cost Functions S. Rasoul Etesami* Abstract W e consider the problem of online job scheduling on a single machine or multiple unrelated machines with general job and machine-dependent cost functions. In this model, each job j has a processing requirement (length) v ij and arri ves with a nonnegati ve nondecreasing cost function g ij ( t ) if it has been dispatched to machine i , and this information is rev ealed to the system upon arriv al of job j at time r j . The goal is to dispatch the jobs to the machines in an online fashion and process them preempti vely on the machines so as to minimize the generalized integral completion time P j g i ( j ) j ( C j ) . Here i ( j ) refers to the machine to which job j is dispatched, and C j is the completion time of job j on that machine. It is assumed that jobs cannot migrate between machines and that each machine has a fixed unit processing speed that can work on a single job at any time instance. In particular , we are interested in finding an online scheduling policy whose objectiv e cost is competitiv e with respect to a slo wer optimal offline benchmark, i.e., the one that knows all the job specifications a priori and is slower than the online algorithm. W e first show that for the case of a single machine and special cost functions g j ( t ) = w j g ( t ) , with nonnegati ve nondecreasing g ( t ) , the highest-density-first rule is optimal for the generalized fractional completion time. W e then extend this result by giving a speed-augmented competitive algorithm for the general nondecreasing cost functions g j ( t ) by utilizing a no vel optimal control frame work. This approach provides a principled method for identifying dual variables in dif ferent settings of online job scheduling with general cost functions. Using this method, we also provide a speed-augmented competiti ve algorithm for multiple unrelated machines with nondecreasing con vex functions g ij ( t ) , where the competitiv e ratio depends on the curvature of the cost functions g ij ( t ) . I . I N T RO D U C T I O N Job scheduling is one of the fundamental problems in operations research and computer science. Broadly speaking, its goal is to schedule a collection of jobs with different specifications to a set of machines by minimizing a certain performance metric. Depending on the application domain, various performance metrics hav e been proposed and analyzed over the past decades, with some of the notable ones being the weighted completion time P j w j C j , where C j denotes the completion time of job j ; weighted flow time P j w j ( C j − r j ) , where r j is the release time of job j ; or a generalization of both, such as weighted ` k -flo w time ( P j w j ( C j − r j ) k ) 1 k [1]–[5]. In fact, one can capture all of these performance metrics using a general form P j g j ( C j ) , where g j ( · ) is a general nonnegati ve and nondecreasing cost function. In this paper , we focus on this most general performance metric and dev elop online algorithms with bounded competiti ve ratios under certain assumptions on the structure of the cost functions g j ( t ) . For instance, by choosing g j ( t ) = w j t and g j ( t ) = w j ( t − r j ) one can obtain the weighted completion time and the weighted flo w time cost functions, respectively . Although minimizing flo w time is often more difficult and considered more important in the past literature, since our analysis is based on the general cost functions g j ( t ) , we do not distinguish between these two cases, and our results continue to hold for either case. Of course, each of the performance metrics that we discussed above was written for only a single machine. Howe ver , one can naturally e xtend them to multiple unrelated machines by setting P j g i ( j ) j ( C j ) , where i ( j ) denotes the machine to which job j is dispatched, and g i ( j ) j is the cost function associated with job j if it is dispatched to machine i ( j ) . *Department of Industrial and Systems Engineering and Coordinated Science Lab, Uni versity of Illinois at Urbana-Champaign, Urbana, IL 61801, Email: (etesami1@illinois.edu). This work is supported by the National Science F oundation under Grant No. EPCN-1944403. The job-scheduling problems hav e been extensi vely studied in the past literature under both offline and online settings. In the offline setting, it is assumed that all the job specifications (i.e., processing lengths, release times, and cost functions) are known and gi ven to the scheduler a priori. In the online setting that we consider in this paper , the scheduler only learns a job specification upon the job’ s arri val at the system, at which point the scheduler must make an irre vocable decision. Here, an irrev ocable decision means that at any current time t , an online scheduler can not change its decisions on ho w the jobs were assigned and processed on the machines before time t . Therefore, an immediate question here is whether an online scheduler can still achiev e a performance “close” to that of the offline one despite its lack of information ahead of time. The question has been addressed using the notion of competitive ratio , which has frequently been used as a standard metric for ev aluating the performance of online algorithms. In this paper , we shall also use the competiti ve ratio to ev aluate the performance guarantees of our devised online algorithms. In this paper , we allow pr eemptive schedules, meaning that the processing of a job on a machine can be interrupted because of the e xistence or arriv al of the other jobs. This is much-needed in a deterministic setting [6]–[8], because e ven for a single machine, there are strong lower bounds for the competiti ve ratio of any online algorithm. For instance, it w as shown in [8] that no deterministic algorithm has bounded competiti ve ratio when preemptions are not allo wed ev en for a single machine with arbitrary large speed augmentation. Moreover , we consider nonmigratory schedules in which a dispatched job must stay on the same machine until its completion and is not allowed to migrate to other machines. In fact, for v arious reasons, such as to increase the lifetimes of machines or reduce failures in job completions, nonmigratory schedules are quite desirable in practical applications [4]. Furthermore, in this paper , we assume that all the machines ha ve unit speeds, and at any time, a machine can work on one job only . This setting is more restricti ve than the rate allocation setting in which a machine can work on multiple jobs at the same time by fractionally distributing its unit processing speed among the jobs [9], [10]. In fact, in the rate allocation setting, an online scheduler has extra freedom to split its computational po wer fractionally among the pending jobs to achie ve a better competiti ve ratio. Unfortunately , even for a simple weighted flow time problem on three unrelated machines, it is known that no online algorithm can achieve a bounded competiti ve ratio [11]. T o overcome that obstacle, in this paper we adopt the speed augmentation framework, which was first proposed by [12] and subsequently used for various online job scheduling problems [3], [4], [13]–[15]. More precisely , in the speed augmentation framew ork, one compares the performance of the online scheduler with that of a weaker optimal offline benchmark, i.e., the one in which each machine has a fixed slo wer speed of 1 1+ , > 0 . In other words, an online scheduler can achie ve a bounded competiti ve ratio if the machines run 1 + times faster than those in the optimal of fline benchmark. In general, there are two dif ferent approaches to devising competitiv e algorithms for online job scheduling. The first method is based on the potential function technique, in which one constructs a cle ver potential function and shows that the proposed algorithm behav es well compared to the offline benchmark in an amortized sense. Unfortunately , constructing potential functions can be very nontri vial and often requires a good “guess. ” Ev en if one can come up with the good potential function, such analysis provides little insight about the problem, and the choice of the potential function is very specific to a particular problem setup [5], [10], [15], [16]. An alternativ e and perhaps more powerful technique, which we shall use in this paper , is the one based on linear/con ve x programming duality and dual-fitting [3], [4], [14]. In this approach, one first models the offline job scheduling problem as a mathematical program and then utilizes this program to dev elop an online algorithm that preserves KKT optimality conditions as much as possible ov er the course of the algorithm. Follo wing this approach, one can construct an online feasible primal solution (i.e., the solution generated by the algorithm) together with a properly “fitted” dual solution, and then sho w that the cost increments in the primal objectiv e (i.e., the increase in the cost of the algorithm due to its decisions) and those of the dual objecti ve are within a certain factor from each other . As a result, the cost increments of the primal and dual feasible solutions due to the arriv al of a new job remain within a certain factor from each other , which establishes a competiti ve ratio for the devised algorithm because of the weak duality . Ho wev er , one major difficulty here is that of carefully selecting the dual variables, which, in general, could be highly nontri vial. As one of the contributions of this paper , we provide a principled way of setting dual variables by using results from optimal control and the minimum principle. As a by-product, we show how one can reco ver some of the earlier dual-fitting results and extend them to more complicated nonlinear settings. A. Related W ork It is kno wn that without speed augmentation, there is no competitiv e online algorithm for minimizing weighted flow time [17]. The first online competitive algorithm with speed augmentation for minimizing flo w time on a single machine was gi ven by [12]. In [5], a potential function was constructed to show that a natural online greedy algorithm is (1 + ) -speed O ( k − (2+ 2 k ) ) -competiti ve for minimizing the ` k - norm of weighted flo w time on unrelated machines. This result was improv ed by [4] to a (1 + ) -speed O ( k − (2+ 1 k ) ) -competiti ve algorithm, which was the first analysis of online job scheduling that uses the dual-fitting technique. In that algorithm, each machine works based on the highest residual density first (HRDF) rule, such that the residual density of a job j on machine i at time t is giv en by the ratio of its weight w ij ov er its remaining length v ij ( t ) , i.e., ρ ij ( t ) := w ij v ij ( t ) . In particular , a newly released job is dispatched to a machine that giv es the least increase in the objectiv e of the of fline linear program. Our algorithm for online job scheduling with generalized cost functions was partly inspired by the primal-dual algorithm in [14], which was dev eloped for a different objectiv e of minimizing the sum of the energy and weighted flo w time on unrelated machines. Ho wev er, unlike the work in [14], for which the optimal dual variables can be precisely determined using natural KKT optimality conditions, the dual v ariables in our setting do not admit a simple closed-form characterization. Therefore, we follow a dif ferent path to infer certain desired properties by using a dynamic construction of dual variables that requires ne w ideas. Online job scheduling on a single machine with general cost functions of the form g j ( t ) = w j g ( t − r j ) , where g ( t ) is a general nonnegati ve nondecreasing function, has been studied in [3]. In particular , it has been shown in [3] that the highest density first (HDF) rule is optimal for minimizing the fractional completion time on a single machine, and it was left open for multiple machines. Here, the fractional objective means that the contribution of a job to the objecti ve cost is proportional to its remaining length. The analysis in [3] is based on a primal-dual technique that updates the optimal dual variables upon arri val of a new job by using a fairly complex two-phase process. W e obtain the same result here using a much simpler process that was inspired by dynamic programming and motiv ated our optimal control formulation, wherein we extended this result to arbitrary nondecreasing cost functions g j ( t ) . The problem of minimizing the generalized flow time P i,j w ij g ( t − r j ) on unrelated machines for a con ve x and nondecreasing cost function g ( · ) has recently been studied in [18], where it is shown that a greedy dispatching rule similar to that in [4], together with the HRDF scheduling rule, pro vides a competiti ve online algorithm under a speed-augmented setting. The analysis in [18] is based on nonlinear Lagrangian relaxation and dual-fitting as in [4]. Howe ver , the competitiv e ratio in [18] depends on additional assumptions on the cost function g ( t ) and is a special case of our generalized completion time problem on unrelated machines. In particular , our algorithm is dif ferent in nature from the one in [18] and is based on a simple primal-dual dispatching scheme. The competitiv e ratios that we obtain in this work follow organically from our analysis and require less assumptions on the cost functions. The generalized flo w time problem on a single machine with special cost functions g j ( t ) = g ( t − r j ) has been studied in [19]. It was sho wn that for nondecreasing nonnegati ve function g ( · ) , the HDF rule is (2 + ) -speed O (1) -competiti ve; the HDF rule is, in essence, the best online algorithm one can hope for under the speed-augmented setting. [18] uses Lagrangian duality for online scheduling problems beyond linear and con vex programming. The problem of rate allocation on a single machine with the objecti ve of minimizing weighted flow/completion time when jobs of unknown size arriv e online (i.e., the nonclairvoyant setting) has been studied in [9], [10], [15]. Moreover , [20] gi ve an (1 + ) -speed O ( 1 2 ) -competiti ve algorithm for fair rate allocation over unrelated machines. The offline version of job scheduling on a single or multiple machines has also receiv ed much attention in the past few years [1], [21]. [22] use a con ve x program to gi ve a 2 -approximation algorithm for minimizing the ` k -norm of the loads on unrelated machines. [23] study offline scheduling on a machine with v arying speed and provide a polynomial-time approximation scheme for minimizing the total weighted completion time P j w j g ( C j ) , ev en without preemption. Moreov er , a tight analysis of HDF for the very same class of problems was giv en by [24]. [25] studied the of fline version of a very general scheduling problem on a single machine; the online version of that problem is considered in this paper . More precisely , [25] provide a preempti ve O (log log nP ) -approximation algorithm for minimizing the generalized completion time P j g j ( C j ) , where n is the number of jobs and P is the maximum job length. This result has recently been extended in [26] to the case of multiple identical machines, where it was sho wn that using preemption and migration, there exists an O (log log nP ) - approximation algorithm for minimizing the of fline generalized completion time, assuming that all jobs are av ailable at the same time. [3] considered the online generalized completion time P j g j ( C j ) problem on a single machine and pro vided a rate allocation algorithm that is (1 + ) -speed 4(1+ ) 2 2 -competiti ve, assuming dif ferentiable and monotone conca ve cost functions g j ( t ) . W e note that the rate allocation problem is a relaxation of the problem we consider here. This paper is the first to study the generalized completion time P j g j ( C j ) problem under the online and speed augmented setting. In particular , for both single and multiple unrelated machines, we provide online preemptiv e nonmigratory algorithms whose competiti ve ratios depend on the curv ature of the cost functions. B. Or ganization and Contrib utions In Section II , we pro vide a formulation of the gener alized inte gral completion time on a single machine (GICS), and its fractional relaxation, namely , generalized frational completion time on a single machine (GFCS). W e also sho w how an online algorithm for GFCS can be con verted to an online algorithm for GIC-S with only a small loss in the speed/competiti ve ratio, hence allo wing us to only focus on designing competiti ve algorithms for the fractional problem. In particular , we consider a special homogeneous case of GFCS that we refer to as HGFCS, for which the cost functions are of the form g j ( t ) = w j g ( t ) , where w j ≥ 0 is a constant weight and g ( t ) is an arbitrary nonnegati ve nondecreasing function. W e sho w that the HDF is an optimal online schedule for HGFCS by determining the optimal dual v ariables using a simple backward process. Using the insights obtained from this special homogeneous case and in order to handle the general GFCS problem, in Section III , we provide an optimal control formulation for the of fline version of GFCS with identical release times. This formulation allo ws us to use tools from optimal control, such as the minimum principle and Hamilton-Jacobi-Bellman (HJB) equation, to set the dual v ariables in GFCS as close as possible to the optimal dual v ariables. In Section IV , we consider the GFCS problem and use our choice of dual variables to design an online algorithm as an iterati ve application of the of fline GFCS with identical release times. In that regard, we deduce our desired properties on the choice of dual v ariables by making a connection to a network flow problem. These results together will allo w us to obtain an 2 K (1 + ) -speed 2(1+ ) -competiti ve algorithm for GICS, assuming monotonicity of the cost functions g j ( t ) , where K = sup j,t ≥ r j ( t − r j ) g 00 j ( t ) g 0 j ( t ) . In Section V , we extend this result to online scheduling for generalized inte gral completion time on unr elated machines (GICU), and its fractional relaxation, namely , generalized frational completion time on unr elated machines (GFCU). In particular , we obtain an 2 K θ (1 + ) -speed 2 θ (1+ ) -competiti ve algorithm for GICU by assuming monotonicity and con ve xity of the cost functions g ij ( t ) , where K = sup i,j,t ≥ r j ( t − r j ) g 00 ij ( t ) g 0 ij ( t ) and θ = sup i,j,t ≥ v g ij ( t + v ) − g ij ( t ) v g 0 ij ( t ) are T ABLE I S U M M A RY O F R E S U L T S F O R G E N E R A L I Z E D I N T E G R A L C O M P L E T I O N T I M E F O R A S I N G L E O R M U LT I P L E N O N M I G R A T O RY M AC H I N E S W I T H P R E E M P T I O N g ( · ) , g j ( · ) Single Machine Multiple Machines P j w j g ( C j ) P j w j g ( C j − r j ) P j g j ( C j ) P j w ij g ( C j − r j ) P j g ij ( C j ) Conv ex 1+ , 1+ − FIFO identical job density [3] 1 1 − 3 , 2 K ( g, ) − HRDF K ( g, ): a function of g , unrelated machines [18] 2 K θ (1+ ) , 2 θ (1+ ) unrelated machines 2+ ,O (1) − WSETF nonclairvoyant [27] 3+ ,O (1) − WSETF nonclairvoyant identical machines [27] K =1+ sup j,t ≥ r j ( t − r j ) g 00 j ( t ) g 0 j ( t ) θ = sup i,j,t ≥ r j g ij ( t + v ) − g ij ( t ) vg 0 ij ( t ) Concave 1+ , 1+ − HDF [3] (1+ ) 2 , (1+ ) 2 2 twice differentiale costs 1+ ,O ( 1 2 ) − WLAPS nonclairvoyant [19] 1+ , 4(1+ ) 2 2 rate allocation setting [3] General 1+ , 1+ − HDF [3] 1+ , (1+ ) − FIFO identical job density [3] 2 K (1+ ) , 2(1+ ) 1+ , 1+ − HDF backward dual-fitting 2+ ,O (1) − HDF [19] K =1+ sup j,t ≥ r j ( t − r j ) g 00 j ( t ) g 0 j ( t ) The ( s, c ) notation describes an algorithm which is c -speed c -competitive. In the above table, we use the following abbreviates: W eighted Late Arrival Processor Sharing (WLAPS), Highest Density First (HDF), Highest Residual Density First (HRDF), First-In-First-Out (FIFO), W eighted Shortest Elapsed Time First (WSETF). The results of this paper are presented in bold notation. curv ature parameters. T o the best of our knowledge, our devised online algorithms are the first speed- augmented competiti ve algorithms for such general cost functions on a single or multiple unrelated machines. W e conclude the paper by identifying some future directions of research in Section VI . Finally , we present another application of the optimal control framew ork to generalization of some of the existing dual-fitting results in Appendix I. W e relegate omitted proofs to Appendix II. T able 1 summarizes the results of this paper in comparison to pre vious work. I I . P R O B L E M F O R M U L A T I O N A N D P R E L I M I N A RY R E S U LT S Consider a single machine that can work on at most one unfinished job j at any time instance t ∈ R + . Moreov er , assume that the machine has a fixed unit processing speed, meaning that it can process only a unit length of a job j per unit of time. W e consider a clairvoyant setting in which each job j has a known length v j and a job-dependent cost function g j ( t ) , which is re vealed to the machine only at its arriv al time r j ≥ 0 . Here, g j ( t ) , t ≥ r j is a nonnegati ve nondecreasing dif ferentiable function with g j ( r j ) = 0 , and t refers to the elapsed time on the machine regardless of whether job j is being processed or is waiting to be processed at time t . In other words, as long as job j is not fully processed, its presence on the machine contributes to the delay cost that includes both the processing duration of job j and the waiting time due to execution of other jobs. Note that in the online setting, the machine does not kno w a priori the job specifications v j , r j , g j ( t ) , and learns them only upon release of job j at time r j . Gi ven a time instance t ≥ r j , let us use v j ( t ) to denote the remaining length of job j at time t , such that v j ( r j ) = v j . W e say that the completion time of the job j is the first time C j > r j at which the job is fully processed, i.e., v j ( C j ) = 0 . Of course, C j depends on the type of schedule that the machine is using to process the jobs, and we hav e not specified the schedule type here. The generalized integral completion time problem on a single machine (GICS) is to find an online schedule that minimizes the objecti ve cost P j g j ( C j ) . In this paper , we shall focus only on de vising competiti ve algorithms for fr actional objectiv e functions. This is a common approach for obtaining a competiti ve, speed-augmented scheduling algorithm for v arious inte gral objecti ve functions [3], [10], [27], [28]. In the fractional problem, only the remaining fraction v j ( t ) v j ≤ 1 of job j at time t contrib utes g 0 j ( t ) amount to the delay cost of job j . Thus, the objecti ve cost of the generalized fractional completion time on a single machine (GFCS) is gi ven by X j Z ∞ r j v j ( t ) v j g 0 j ( t ) dt. Note that the fractional cost is a lower bound for the integral cost in which the entire unit fraction v j v j = 1 of a job j recei ves a delay cost of g 0 j ( t ) such that R C j r j 1 × g 0 j ( t ) dt = g j ( C j ) . The follo wing lemma, whose proof is gi ven in Appendix II, is a slight generalization of the result in [13], which establishes a “black-box” reduction between designing a competitiv e, speed-augmented algorithm for the GFCS problem and its integral counterpart GICS. Definition 1: An online algorithm is called s -speed c -competitiv e if it can achie ve a competitiv e ratio of c giv en that the machine runs s times faster than that in the optimal offline algorithm. Lemma 1: Gi ven any ∈ (0 , 1] , an s -speed c -competiti ve algorithm for the GFCS problem can be con verted to an (1 + ) s -speed 1+ c -competiti ve algorithm for the GICS problem. Although our ultimate goal is to de vise online algorithms for the GICS, in the remainder of this paper , we only focus on deri ving online algorithms that are competiti ve for the GFCS. Ho wev er , using Lemma 1 , the results can be extended to the integral objecti ves by incurring a small multiplicativ e loss in speed and competitiv e ratio. Remark 1: It was shown in [3] that for special cost functions g j ( t ) = w j g ( t ) , one can bypass the black-box reduction of Lemma 1 , and obtain an improvement to the competitiv e ratio and the speed by a factor of O ( 1 ) and O (1 + ) , respecti vely . Thus, it would be interesting to see whether the same direct approach can be applied to our generalized cost setting. Next, we introduce a natural LP formulation for the GFCS problem and postpone its extension to multiple unrelated machines to Section V . The deri v ation of such LP formulation follows similar steps as those in [3], [4], [27], and we provide here for the sake of completeness. Let us use x j ( t ) to denote the rate at which job j is processed in an infinitesimal interval [ t, t + dt ] , such that dv j ( t ) = − x j ( t ) dt . Thus, using integration by parts, we can write the above objectiv e as X j Z ∞ r j v j ( t ) v j g 0 j ( t ) dt = X j v j ( t ) v j g j ( t ) | ∞ r j + Z ∞ r j g j ( t ) v j x j ( t ) dt ! = X j Z ∞ r j g j ( t ) v j x j ( t ) dt, where the second equality holds because g j ( r j ) = 0 and v j ( ∞ ) = 0 . No w , for simplicity and by some abuse of notation, let us redefine g j ( t ) to be its scaled version g j ( t ) v j . Then, the offline GFCS problem is giv en by the following LP , which is also a fractional relaxation for the offline GICS problem. min X j Z ∞ r j g j ( t ) x j ( t ) dt subject to Z ∞ r j x j ( t ) v j ≥ 1 , ∀ j X j x j ( t ) ≤ 1 , ∀ t x j ( t ) ≥ 0 , ∀ j, t. (1) Here, the first constraint implies that e very job j must be fully processed. The second constraint ensures that the machine has a unit processing speed at each time instance t . Finally , the integral constraints x j ( t ) ∈ { 0 , 1 } , ∀ j, t , which are necessary to ensure that at each time instance at most one job can be processed, are relaxed to x j ( t ) ≥ 0 , ∀ j, t . The dual of the LP ( 1 ) is giv en by max X j α j − Z ∞ 0 β t dt subject to α j v j ≤ β t + g j ( t ) , ∀ j, t ≥ r j α j , β t ≥ 0 , ∀ j, t. (2) Therefore, our goal in solving the GFCS problem is to devise an online algorithm whose objectiv e cost is competiti ve with respect to the optimal offline LP cost ( 1 ). A. A Special Homog eneous Case In this section, we consider a homogeneous version of the GFCS problem, namely HGFCS, which is for the specific cost functions g j ( t ) = w j g ( t ) , where w j ≥ 0 is a constant weight reflecting the importance of job j , and g ( t ) is a general nonnegati ve nondecreasing function. Again by some abuse of notation, the scaled cost function is giv en by g j ( t ) = ρ j g ( t ) , where ρ j := w j v j denotes the density of job j . The assumption that g j ( r j ) = 0 , ∀ j requires g ( r j ) = 0 , ∀ j . Howe ver , this relation can be assumed without loss of generality by shifting each function to g j ( t ) = ρ j ( g ( t ) − g ( r j )) . This change only adds a constant term P j w j g ( r j ) to the objecti ve cost. If we re write ( 1 ) and ( 2 ) for this special class of cost functions, we obtain, min X j Z ∞ r j ρ j g ( t ) x j ( t ) dt max X j α j − Z ∞ 0 β t dt subject to Z ∞ r j x j ( t ) v j ≥ 1 , ∀ j subject to α j v j ≤ β t + ρ j g ( t ) , ∀ j, t ≥ r j X j x j ( t ) ≤ 1 , ∀ t α j , β t ≥ 0 , ∀ j, t x j ( t ) ≥ 0 , ∀ j, t. (3) Next, in order to obtain an optimal online schedule for the HGFCS problem, we generate an integral feasible solution (i.e., x j ( t ) ∈ { 0 , 1 } ) to the primal LP ( 3 ) together with a feasible dual solution of the same objecti ve cost. The integral feasible solution is obtained simply by following the highest density first (HDF) schedule: among all the alive jobs, pr ocess the one that has the highest density . More precisely , if the set of ali ve jobs at time t is denoted by A ( t ) := { j : v j ( t ) > 0 , t ≥ r j } , the HDF rule schedules the job arg max j ∈ A ( t ) ρ j at time t , where ties are brok en arbitrarily . Next, let us apply the HDF rule on the original instance with n jobs, and let ∪ k j ` =1 [ t j ` , t j ` + ¯ v j ` ] be the disjoint time interv als in which job j is being processed. Here 0 ≤ t j k j < . . . < t j 2 < t j 1 are the time instances at which the HDF schedule preempts e xecution of other jobs in order to process job j , and ¯ v j k j , . . . , ¯ v j 1 are the length portions of job j that are processes between those consecutive preemption times. In particular , we note that P k j ` =1 ¯ v j ` = v j . W e define the split instance to be the one with N := P n j =1 k j jobs, where the k j jobs (subjobs in the original instance) associated with job j have the same density ρ j , lengths ¯ v j 1 , . . . , ¯ v j k j , and release times t j 1 , . . . , t j k j . The motiv ation for introducing the split instance is that we do not need to worry about time instances at which a job is interrupted/resumed because of arri val/completion of ne wly released jobs. Therefore, instead of keeping a record of the time instances at which the HDF schedule preempts a job in the original instance, we can treat each subjob separately as a new job in the split instance. This allows us to easily generate a dual optimal solution for the split instance and then con vert it into an optimal dual solution for the original instance. Lemma 2: Let I o be an original instance of the HGFCS problem with the corresponding split instance I s . Then, the fractional completion time of HDF for both I o and I s is the same. In particular , HDF is an optimal online schedule for I s with respect to the fractional completion time, and the optimal dual v ariables for I s can be obtained in a closed-form. Pr oof: As HDF performs identically on both the split and original instances, the cost of HDF on both instances is the same. In the split instance I s , each ne w job (which would hav e been a subjob in the original instance I o ) is released right after completion of the pre vious one. The order in which these jobs are released is exactly the one dictated by the HDF . Therefore, any work-preserving schedule (and, in particular , HDF rule) that uses the full unit processing power of the machine would be optimal for the split instance. Furthermore, we can fully characterize the optimal dual solution for the split instance in a closed form. T o see this, let us relabel all the N := P n j =1 k j jobs in increasing order of their processing interv als by 1 , 2 , . . . , N . Then, ¯ β t = ρ k ( g ( t k + ¯ v k ) − g ( t )) + N X j = k +1 ρ j ( g ( t j + ¯ v j ) − g ( t j )) , if t ∈ [ t k , t k + ¯ v k ] , ¯ α k = ¯ v k ( ¯ β t k + ρ k g ( t k )) , (4) form optimal dual solutions to the split instance max { N X k =1 ¯ α k − Z ∞ 0 ¯ β t dt : ¯ α k ¯ v k ≤ ¯ β t + ρ k g ( t ) , ¯ α k , ¯ β t ≥ 0 , ∀ k , t ≥ t k } . (5) Intuiti vely , ¯ β t in ( 4 ) is a piece wise decreasing function of time t , which captures the time v ariation of the fractional completion time for I s as one follo ws the HDF schedule. In response, ¯ α k is chosen to satisfy the complementary slackness condition with respect to the choice of ¯ β t . More precisely , by the definition of dual v ariables in ( 4 ), the dual constraint ¯ α k ¯ v k ≤ ¯ β t + ρ k g ( t ) is satisfied by equality for the entire time period [ t k , t k + ¯ v k ] , during which job k is scheduled. T o explain why , we note that x k ( t ) = 1 for t ∈ [ t k , t k + v k ] . Thus, for any such t and using ( 4 ), we hav e, ¯ v k [ ¯ β t + ρ k g ( t )] = ¯ v k [ ρ k ( g ( t k + ¯ v k ) − g ( t )) + N X j = k +1 ρ j ( g ( t j + ¯ v j ) − g ( t j )) + ρ k g ( t )] = ¯ v k [ ¯ β t k + ρ k g ( t k )] = ¯ α k . Therefore, the dual constraint is tight whenev er the corresponding primal v ariable is positi ve, which sho ws that the dual v ariables in ( 4 ) together with the integral primal solution generated by the HDF produce an optimal pair of primal-dual solutions to the split instance. Definition 2: W e refer to diagrams of the optimal dual solutions ( 4 ) in the split instance as the α -plot and β -plot. More precisely , in both plots, the x -axis represents the time horizon partitioned into the time interv als ∪ N k =1 [ t k , t k + ¯ v k ] with which HDF processes subjobs. In the α -plot, we draw a horizontal line segment at the height ¯ α k ¯ v k for subjob k and within its processing interval [ t k , t k + ¯ v k ] . In the β -plot we simply plot ¯ β t as a function of time. W e refer to line segments of the subjobs k = j ` that are associated with job j as j -steps (see Example 1 ). Next, in Algorithm 1 , we describe a simple backward process for con verting optimal dual solutions ( ¯ α, ¯ β t ) in the split instance to optimal dual solutions ( α , β t ) for the original HGFCS instance with the same objectiv e cost. The correctness of Algorithm 1 is sho wn in Lemma 3 whose proof is gi ven in Appendix II. 0 1 2 3 4 5 6 7 8 5 10 15 20 25 30 0 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 20 Fig. 1. An illustration of the α, β -plots in Example 1 . The blue line segments on the left figure correspond to steps (i.e., subjobs) in the optimal split instance. The red line se gments are those associated with the optimal dual variables in the original HGFCS instance, which are obtained at the end of Algorithm 1 . The right figure illustrates the optimal β -curves for the split and original instances. Algorithm 1 A Dual Update Process for HGFCS Input: The α , β -plots obtained from the optimal split instance, gi ven by ( 4 ). Output: Optimal dual α, β -plots for the HGFCS problem. Gi ven α, β -plots obtained from the optimal split instance, update these plots sequentially by mo ving backward over the steps (i.e., from right to left) until time t = 0 as follows: • (1) If the current step k is the first j -step visited from the right, i.e., k = j 1 , reduce its height to h j = min t ≥ t k { ¯ β t + ρ k g ( t ) } , and fix it as a r eference height for job j . Otherwise, if k = j ` , ` ≥ 2 , reduce the height of step k to its previously set reference height h j . • (2) Reduce the height of all other unupdated steps on the left side of step k by δ k , where δ k denotes the height decrease of the current step k . Update the β -plot accordingly by lo wering the value of ¯ β t by the same amount δ k for all times prior to the current step (i.e., ∀ t ∈ [0 , t k + ¯ v k ] ). Lemma 3: The reference heights { h j } n j =1 and { β t } t ≥ 0 v alues obtained from α, β -plots at the end of Algorithm 1 form feasible dual solutions ( { α j v j := h j } n j =1 , { β t } t ≥ 0 ) to the original online HGFCS instance whose dual cost equals to the optimal cost of the splitted instance OPT . Example 1: Consider an (original) instance of the HGFCS with jobs’ lengths { v 1 = 3 , v 2 = 1 , v 3 = 2 , v 4 = 1 , v 5 = 1 } , release times { r 1 = 0 , r 2 = 1 , r 3 = 2 , r 4 = 3 , r 5 = 4 } , and densities { ρ 1 = 1 , ρ 2 = 2 , ρ 3 = 3 , ρ 4 = 4 , ρ 5 = 5 } . Moreover , assume that g ( t ) = t so that the HGFCS problem reduces to the standard fractional completion time problem: min { X j ρ j Z ∞ r j tx j ( t ) dt : Z ∞ r j x j ( t ) v j ≥ 1 , X j x j ( t ) ≤ 1 , x j ( t ) ≥ 0 , ∀ j, t } . No w , if we apply HDF on this instance, we get a split instance with 7 subjobs: two 1 -steps of lengths ¯ v 1 1 = 2 , ¯ v 1 2 = 1 , which are scheduled over time intervals [6 , 8] and [0 , 1] ; a 2 -step of length ¯ v 2 1 = 1 , which is scheduled over [1 , 2] ; two 3 -steps of equal length ¯ v 3 1 = ¯ v 3 2 = 1 , which are scheduled ov er interv als [5 , 6] and [2 , 3] ; one 4 -step of length ¯ v 4 1 = 1 , which is scheduled over [3 , 4] ; and, finally , one 5 -step of length ¯ v 5 1 = 1 , which is scheduled ov er [4 , 5] . These steps for the split instance are illustrated by blue line segments in the α -plot in Figure 1 . The corresponding optimal β -plot for the split instance is also giv en by the continuous blue curv e in Figure 1 , which was obtained from ( 4 ). No w , mo ving backward in time ov er the steps, we set 1 1 , 3 1 , 5 1 as the reference steps for jobs 1 , 3 , and 5 , respectiv ely . Note that by Algorithm 1 , these steps do not need to be lo wered. Ho wev er , step 4 1 will be lo wered by one unit and set as the reference height for job 4 . Consequently , all the steps before 4 1 will be lowered by one unit in both the α -plot and β -plot. Continuing in this manner by processing all the remaining steps 3 2 , 2 1 , 1 2 , we eventually obtain the red steps in the α -plot and the red piecewise curv es in the β -plot which correspond to the optimal dual solutions of the original instance. Note that at the end of this process, all the steps corresponding to a job are set to the same reference height. F or instance, the two subjobs 3 1 and 3 2 are set to the reference height 20 , i.e., ¯ α 3 1 ¯ v 3 1 = ¯ α 3 2 ¯ v 3 2 = 20 . Theor em 1: HDF is an optimal online algorithm for the HGFCS problem with cost functions g j ( t ) = ρ j g ( t ) , where g ( t ) is an arbitrary nonne gativ e nondecreasing function. Pr oof: Consider the split instance obtained by applying HDF on the original online HGFCS instance with n jobs. From Lemma 2 , HDF is an optimal schedule for the split instance whose optimal cost OPT equals the cost of HDF on the original HGFCS instance. Let ( { ¯ α k } N k =1 , ¯ β t ) be the optimal dual solution to the split instance. Using Algorithm 1 , one can con vert ( { ¯ α k } N k =1 , ¯ β t ) to a feasible dual solution ( { α j } n j =1 , β t ) for the original HGFCS instance with the same objecti ve cost OPT (Lemma 3 ). Thus, the solution generated by HDF together with ( { α j } n j =1 , β t ) forms a feasible primal-dual solution to the original HGFCS instance with the same cost OPT . Therefore, by strong duality , HDF is an optimal online schedule for the original HGFCS instance. Algorithm 1 provides a simple update rule for generating optimal dual v ariables for HGFCS with special cost functions g j ( t ) = ρ j g ( t ) , that is when all the cost functions share the same basis function g ( t ) . Unfortunately , it quickly becomes intractable when one considers general cost functions g j ( t ) . The main reason is that for general cost functions g j ( t ) , it is kno wn that optimal job scheduling on a single machine is NP-hard e ven for the offline setting [25]. In particular , for general cost functions, one first needs to construct the entire dual curves and then use them to determine the optimal reference heights. That requires exponential computation in terms of the number of jobs. Ho wever , one can still use a backward induction similar to that in Algorithm 1 to set the dual v ariables as close as possible to their optimal v alues, and that is the main idea behind our generalized competiti ve analysis for GFCS. More precisely , a closer look at the structure of Algorithm 1 sho ws that it mimics a dynamic programming update that starts from a dual solution, namely the optimal dual solution of the split instance, and mov es backward to fit it into the dual of the original HGFCS instance. This observ ation suggests that one can formulate the offline GFCS problem as an optimal control problem in which the Hamilton-Jacobi-Bellman (HJB) equation plays the role of Algorithm 1 abov e and tells us how to fit the dual variables as closely as possible to the dual of the of fline GFCS problem. Ho wev er , a major challenge here is that for the GFCS problem, jobs can arri ve online over time. T o ov ercome that, we use the insights obtained from Algorithm 1 to approximately determine the structure of the optimal β -curv e. From the red discontinuous curve in the β -plot of Figure 1 , it can be seen that the optimal β -plot has discontinuous jumps whenev er a new job arriv es in the system. T o mimic that behavior in the general setting, we proceed as follows. Upon arriv al of a ne w job n at time r n , we may need to update the online schedule for future times t ≥ r n . Ho wev er , since an online scheduler does not kno w anything about future job arriv als, we assume that the aliv e jobs at time r n are the only ones in the system, which are all av ailable at the same time r n . In other words, we consider an of fline instance of GFCS with identical release times r n , henceforth referred to as GFCS ( r n ) . By solving GFCS ( r n ) using optimal control, we update the schedule for t > r n . In this fashion, one only needs to iterati vely solve of fline optimal control problems with identical release times, as described in the ne xt section. I I I . A N O P T I M A L C O N T R O L F O R M U L A T I O N F O R T H E O FFL I N E G F C S P RO B L E M W I T H I D E N T I C A L R E L E A S E T I M E S In this section, we cast the offline GFCS problem with identical release times r n as an optimal control problem. By abuse of notation, we refer to this problem either in an LP form or an optimal control form as GFCS ( r n ) . Consider the time r n when a ne w job n is released to the system, and let A ( r n ) be the set of currently ali ve jobs (excluding job n ). Now , if we assume that no ne w jobs are going to be released in the future, then an optimal schedule must solve an offline instance with a set of jobs A ( r n ) ∪ { n } and identical release times r n , where the length of job j ∈ A ( r n ) ∪ { n } is given by its residual length v j ( r n ) at time r n . (Note that for job n , we hav e v j ( r n ) = v n , as this job is released at time r n .) Since the optimal cost of this offline instance depends on the residual lengths of the ali ve jobs, we shall refer to those residual lengths as states of the system at time r n . More precisely , we define the state of job j at time t to be the residual length v j ( t ) of that job at time t , and the state vector to be v ( t ) = ( v 1 ( t ) , . . . , v k ( t )) T , where k = |A ( r n ) | + 1 . Note that since GFCS ( r n ) assumes no future arri vals, the dimension of the state vector does not change and equals the number of aliv e jobs at time r n . Let us define the contr ol input at time t to be x ( t ) = ( x 1 ( t ) , . . . , x k ( t )) T , where x j ( t ) is the rate at which job j is processed at time t . Thus, v j ( t ) = v j ( r n ) − R t r n x j ( τ ) dτ , or , equiv alently , ˙ v j ( t ) = − x j ( t ) , with the initial condition v j ( r n ) . If we write those equations in a vector form, we obtain ˙ v ( t ) = − x ( t ) , v ( r n ) = ( v 1 ( r n ) , . . . , v k ( r n )) T . (6) Moreov er , because of the second primal constraints in ( 1 ), we note that at any time, the control vector x ( t ) must belong to the simplex X := { u ∈ [0 , 1] k : P k i =1 u j = 1 } . Thus, an equi valent optimal control formulation for ( 1 ) with identical release times r n and initial state v ( r n ) is giv en by min X j ∈A ( r n ) Z ∞ r n g j ( t ) x j ( t ) dt, subject to ˙ v ( t ) = − x ( t ) , v ( r n ) = ( v 1 ( r n ) , . . . , v k ( r n )) T , v ( ∞ ) = 0 , x ( t ) ∈ X , ∀ t, where, as before, g j ( t ) refers to the original cost function scaled by 1 v j . Note that for any t , the loss function P j g j ( t ) x j ( t ) is nonneg ative. As g j ( t ) s can only increase ov er time, any optimal control x o ( t ) must finish the jobs in the finite time interv al [ r n , t 1 ] , t 1 := r n + P j v j ( r n ) . Thus, without loss of generality , we can replace the upper limit in the integral with t 1 , which gi ves us the following optimal control formulation for GFCS ( r n ) : min Z t 1 r n X j ∈A ( r n ) g j ( t ) x j ( t ) dt, subject to ˙ v ( t ) = − x ( t ) , v ( r n ) = ( v 1 ( r n ) , . . . , v k ( r n )) T , v ( t 1 ) = 0 , x ( t ) ∈ X , ∀ t ∈ [0 , t 1 ] . (7) It is worth noting that we do not need to add nonnegati vity constraints v ( t ) ≥ 0 to ( 7 ), as they implicitly follo w from the terminal condition. The reason is that if v j ( t ) < 0 for some j and t ≤ t 1 , then, as x j ( t ) ≥ 0 , the state can only decrease further and remains negati ve forev er , violating the terminal condition v ( t 1 ) = 0 . Therefore, specifying that v ( t 1 ) = 0 already implies that v ( t ) ≥ 0 , ∀ t . A. Solving GFCS ( r n ) Using the Minimum Principle In this section, we proceed to solve the optimal control problem ( 7 ) by using the minimum principle. W e first state the following general theorem from optimal control theory that will allo w us to characterize the structure of optimal solution to GFCS ( r n ) [29, Theorem 11.3]: Theor em 2 (Minimum Principle): Consider the general optimal control problem: min u ( t ) ∈U , ∀ t Z t 1 t 0 ` ( y ( t ) , u ( t ) , t ) dt : ˙ y ( t ) = f ( y ( t ) , u ( t ) , t ) , y ( t 0 ) = y 0 , y ( t 1 ) = 0 , (8) where y 0 ∈ R d 1 is the initial state, U ⊆ R d 2 is the control constraint set, and ` : R d 1 + d 2 +1 → R is a scalar -valued cost function of the state vector y ( t ) , control input u ( t ) , and time t . Consider the Hamiltonian function H ( y , u , p , t ) = p T f ( y , u , t ) + ` ( y , u , t ) , and suppose that u o ( t ) is the optimal control solution to ( 8 ). Then, there exists a costate vector p ( t ) such that ∀ t ∈ [ t 0 , t 1 ] , u o ( t ) = argmin u ∈U H ( y o ( t ) , u , p ( t ) , t ) and ˙ p ( t ) = −∇ y H ( y o ( t ) , u o ( t ) , p ( t ) , t ) , where y o ( t ) is the optimal state trajectory corresponding to u o ( t ) , i.e., ˙ y o ( t ) = f ( y o ( t ) , u o ( t ) , t ) with y o ( t 0 ) = y 0 , y o ( t 1 ) = 0 . As the minimum principle can be viewed as an infinite-dimensional generalization of the Lagrangian duality [30], in the following, the readers who are more familiar with nonlinear programming can think of the costate vector as the Lagrangian multipliers, the Hamiltonian as the Lagrangian function, and the minimum principle as the saddle point conditions. By specializing Theorem 2 to our problem setting, one can see that the corresponding Hamiltonian for ( 7 ) with a costate vector p ( t ) is giv en by H ( v , x , p ) := P j g j ( t ) x j ( t ) − p T ( t ) x ( t ) . If we write the minimum principle conditions, we obtain: ˙ p j ( t ) = − ∂ ∂ v j H ( v , x , p ) = 0 , ∀ j ⇒ p j ( t ) = p j ( t 1 ) , ∀ j, t ≥ r n x o ( t ) := arg min x ∈X { X j ∈A ( r n ) g j ( t ) x j ( t ) − p T ( t ) x ( t ) } ⇒ x o j ( t ) = ( 1 , if j = arg max k ( p k ( t 1 ) − g k ( t )) 0 , else . Therefore, for ev ery j ∈ A ( r n ) , the minimum principle optimality conditions for ( 7 ) with free terminal time t 1 and fix ed endpoints are gi ven by p j ( t ) = p j ( t 1 ) , ∀ j, t ≥ r n ˙ v o j ( t ) = − x o j ( t ) , ∀ j, t ≥ r n x o j ( t ) = ( 1 , if j = arg max k ( p k ( t 1 ) − g k ( t )) 0 , else , (9) with the boundary conditions v j ( r n ) , v j ( t 1 ) = 0 , and P j ( g j ( t 1 ) − p j ( t 1 )) x j ( t 1 ) = 0 . Therefore, we obtain the following corollary about the structure of the optimal of fline schedule for GFCS ( r n ) : Cor ollary 1: The optimal offline schedule for GFCS ( r n ) is obtained by plotting all the job curves { p k ( t 1 ) − g k ( t ) , k ∈ A ( r n ) } , and, at any time t , scheduling the job j whose curve p j ( t 1 ) − g j ( t ) determines the upper en velope of all other curves at that time. In order to use Corollary 1 , one first needs to determine the costate constants p k ( t 1 ) , k ∈ A ( r n ) (although in some special cases kno wing the exact v alues of p k ( t 1 ) is irrele vant in determining the structure of the optimal policy , see, e.g., Proposition 1). These constants can be related to the optimal α -dual v ariables in ( 2 ) assuming identical release times r n . T o see that, let us define β t := p j ( t 1 ) − g j ( t ) if at time t job j is scheduled, and α k v k ( r n ) := p k ( t 1 ) , ∀ k ∈ A ( r n ) . Then, for all the time instances I j at which job j is scheduled, we ha ve β t + g j ( t ) = p j ( t 1 ) − g j ( t ) + g j ( t ) = p j ( t 1 ) = α j v j ( r n ) , ∀ t ∈ I j , which shows that the dual constraint in ( 2 ) must be tight. Thus, if we define the dual variables in terms of costates as abo ve, the complementary slackness conditions will be satisfied. Moreo ver , giv en an arbitrary time t ∈ I j at which job j is scheduled, from the last condition in ( 9 ), we ha ve p j ( t 1 ) − g j ( t ) ≥ p k ( t 1 ) − g k ( t ) , ∀ k . As we defined β t = p j ( t 1 ) − g j ( t ) , we have, α k v k ( r n ) = p k ( t 1 ) ≤ p j ( t 1 ) − g j ( t ) + g k ( t ) = β t + g k ( t ) , which shows that the abov e definitions of dual variables in terms of costates are also dual feasible, and hence must be optimal. As a result, we can reco ver optimal dual variables from the costate curves and vice versa. In the next section, we will use the HJB equation to determine costate constants p j ( t 1 ) , ∀ j in terms of the v ariations in the optimal v alue function. B. Determining Optimal Dual V ariables for GFCS ( r n ) Here, we consider the problem of determining costate constants and hence optimal of fline dual v ariables. T o that aim, let us define V o ( v , t ) = min x [ t,t 1 ] ∈X n Z t 1 t X j ∈A ( t ) g j ( τ ) x j ( τ ) dτ : ˙ v ( τ ) = − x ( τ ) , v ( t ) = ( v 1 , . . . , v k ) T , v ( t 1 ) = 0 o , as the optimal v alue function for the optimal control problem ( 7 ), giv en initial state v at initial time t , where the minimum is taken ov er all control inputs x [ t, t 1 ] over the time interv al [ t, t 1 ] such that x ( τ ) ∈ X , ∀ τ ∈ [ t, t 1 ] . It is sho wn in [29, Section 11.1] and [30, Section 5.2] that at any point of differentiability of the optimal v alue function, the costate obtained from the minimum principle must be equal to the gradient of the optimal value function with respect to the state variable, i.e., p ( t ) = ∂ ∂ v V o ( v o ( t ) , t ) , where v o ( t ) denotes the optimal state trajectory obtained by follo wing the optimal control x o ( t ) . As before, let I j denote the set of time instances at which the optimal schedule processes job j , i.e., x o j ( t ) = 1 , ∀ t ∈ I j . As we sho wed that the optimal dual variable β t is giv en by β t = p j ( t ) − g j ( t ) , ∀ t ∈ I j , we can write, β t = ∂ ∂ v j V o ( v o ( t ) , t ) − g j ( t ) , ∀ t ∈ I j . (10) On the other hand, if we write the HJB equation [29, Chapter 10] (see also [30, Section 5.1.3]) for the optimal control problem ( 7 ), for any initial time t and any initial state v , it is known that the optimal v alue function V o ( · ) must satisfy the HJB equation gi ven by − ∂ ∂ t V o ( v , t ) = min x ∈X { X ` ∈A ( t ) g ` ( t ) − ∂ ∂ v ` V o ( v , t ) x j } , (11) where the minimum is achiev ed for a job j with the smallest g j ( t ) − ∂ ∂ v j V o ( v , t ) . As a result, the optimal control is giv en by x o j = 1 , and x o ` = 0 ∀ ` 6 = j . Thus, if we write the HJB equation ( 11 ) along the optimal trajectory v o ( t ) with the associated optimal control x o ( t ) , we obtain − ∂ ∂ t V o ( v o ( t ) , t ) = g j ( t ) − ∂ ∂ v j V o ( v o ( t ) , t ) ∀ t ∈ I j . (12) In view of ( 10 ), ( 12 ) sho ws that the optimal dual v ariable β t is giv en by β t = ∂ ∂ t V o ( v o ( t ) , t ) , ∀ t ∈ I j . Since the above argument holds for ev ery I j , we have β t = ∂ ∂ t V o ( v o ( t ) , t ) ∀ t. (13) Moreov er , from using complementary slackness, we kno w that the dual constraint α j v j ( r n ) ≤ β t + g j ( t ) is tight for ev ery t ∈ I j . That, together with ( 12 ) and ( 13 ), implies α j v j ( r n ) = β t + g j ( t ) = ∂ ∂ t V o ( v o ( t ) , t ) + g j ( t ) = ∂ ∂ v j V o ( v o ( t ) , t ) , ∀ t ∈ I j . As a result, for ev ery t ∈ I j the v alue of ∂ ∂ v j V o ( v o ( t ) , t ) is a constant that equals the optimal α -dual v ariable for the job j that is currently being processed, i.e., α j v j ( r n ) = ∂ ∂ v j V o ( v o ( t ) , t ) ∀ t ∈ I j . (14) In other words, the optimal dual variables α j v j ( r n ) and β t in the GFCS ( r n ) problem are equal to the sensiti vity of the optimal value function with respect to the length of job j that is currently being processed and the execution time t , respecti vely . Here, the sensitivity of the value function with respect to a parameter (e.g., job length or time) refers to the amount of change in the optimal objective value of GFCS ( r n ) due to an infinitesimal change in that parameter . Example 2: Consider an instance of GFCS ( r n ) with r n = 0 and two jobs of lengths v 1 (0) = 1 and v 2 (0) = 2 . Moreov er , let g 1 ( t ) = ρ 1 t and g 2 ( t ) = ρ 2 t , where ρ 1 > ρ 2 . From the pre vious section we kno w that HDF is the optimal schedule for HGFC giv en those special cost functions. Therefore, the optimal v alue function is given by V o ( v 1 , v 2 , t ) = Z t + v 1 t ρ 1 τ dτ + Z t + v 1 + v 2 t + v 1 ρ 2 τ dτ = ρ 1 v 2 1 + 2 tv 1 2 + ρ 2 v 2 2 + 2 v 2 ( t + v 1 ) 2 . (15) Moreov er , the optimal control is x o 1 ( t ) = 1 if t ∈ [0 , 1) , and x o 2 ( t ) = 1 if t ∈ [1 , 3) . Thus, the optimal state trajectory is giv en by v o ( t ) = ( v o 1 ( t ) = 1 − t, v o 2 ( t ) = 2 , if t ∈ [0 , 1) v o 1 ( t ) = 0 , v o 2 ( t ) = 3 − t if t ∈ [1 , 3) . (16) No w , using ( 15 ) and ( 16 ), we can write β t = ∂ ∂ t V o ( v o ( t ) , t ) = ( ρ 1 v 1 + ρ 2 v 2 ) | ( v o ( t ) ,t ) = ( ρ 1 (1 − t ) + 2 ρ 2 , if t ∈ [0 , 1) , ρ 2 (3 − t ) if t ∈ [1 , 3) . On the other hand, we ha ve α 1 1 = ∂ ∂ v 1 V o ( v o ( t ) , t ) = ( ρ 1 ( v 1 + t ) + ρ 2 v 2 ) | ( v o ( t ) ,t ) = ρ 1 + 2 ρ 2 , ∀ t ∈ [0 , 1) , α 2 2 = ∂ ∂ v 2 V o ( v o ( t ) , t ) = ρ 2 ( v 1 + v 2 + t ) | ( v o ( t ) ,t ) = 3 ρ 2 , ∀ t ∈ [0 , 1) . No w one can see that the abov e α 1 , α 2 , β t are optimal dual variables with optimal objecti ve v alue α 1 + α 2 − Z 3 0 β t dt = ( ρ 1 + 2 ρ 2 ) + 6 ρ 2 − ( ρ 1 2 + 4 ρ 2 ) = ρ 1 2 + 4 ρ 2 . An advantage of using the optimal control frame work is its simplicity in deriving good estimates on the optimal dual v ariables, which have been deriv ed in the past literature using LP duality arguments [4]. Unfortunately , for more comple x nonlinear objectiv e functions, adapting LP duality analysis seem dif ficult, while the optimal control method can still provide useful insights on how to set the dual v ariables (see, e.g., Appendix I). The idea of deriving such bounds is simple and intuitiv e. Specifically , by ( 13 ), we know that for a single machine β t = ∂ ∂ t V o ( v o ( t ) , t ) , ∀ t . Since a lar ger β t will always be in fav or of dual feasibility , instead of finding V o ( v o ( t ) , t ) , which might be difficult, we find an upper bound for it. T o that end, we can upper-bound V o ( v o ( t ) , t ) by using the cost incurred by any feasible test policy (e.g., HDF) that is typically chosen to be a perturbation of the optimal offline policy . The closer the test policy is to the optimal one, the more accurate the dual bounds that can be obtained. W e shall e xamine this idea in more detail in the subsequent sections. I V . A C O M P E T I T I V E O N L I N E A L G O R I T H M F O R T H E G F C S P RO B L E M In this section, we consider the GFCS problem on a single machine whose of fline LP relaxation and its dual are gi ven by ( 1 ) and ( 2 ), respecti vely . In the online setting, the nonnegati ve nondecreasing cost functions g j ( t ) , j = 1 , 2 , . . . , are released at time instances r 1 , r 2 , . . . , and our goal is to pro vide an online scheduling policy to process the jobs on a single machine and achie ve a bounded competitiv e ratio with respect to the optimal of fline LP cost ( 1 ). As we saw in Section III , the GFCS ( r n ) problem can be formulated as the optimal control problem ( 7 ). Here, we show ho w to devise an online algorithm for the GFCS problem by repeated application of the of fline problem. The online algorithm that we propose works in a greedy fashion as detailed in Algorithm 2 . Intuitiv ely , the online Algorithm 2 always schedules jobs based on its most recent optimal of fline policy (which assumes no future arri vals) until a ne w job n is released at time r n . At that time, the algorithm updates its scheduling policy by solving a ne w GFCS ( r n ) to account for the impact of the ne w job n . Algorithm 2 An Online Algorithm for the GFCS Problem Input: An instance of the GFCS problem { v j , r j , g j ( t ) , j = 1 , 2 , . . . } , as defined in Section II . Output: An online schedule that determines what job must be processed at each time t ≥ 0 . • Upon arri val of a new job n at time r n , let A 0 ( r n ) denote the set of aliv e jobs at time r n , including job n , with remaining lengths { v j ( r n ) , j ∈ A 0 ( r n ) } . • Solve the of fline GFCS ( r n ) problem ( 7 ) for jobs A 0 ( r n ) and job lengths { v j ( r n ) , j ∈ A 0 ( r n ) } . Let x o ( t ) denote the optimal solution to this offline problem, which from ( 9 ) it must be integral. • Schedule the jobs from time r n onward based on the inte gral optimal solution x o ( t ) , t ≥ r n . Time Complexity of Algorithm 2 : The runtime of Algorithm 2 is O ( nT s ) , where T s is the time complexity of an of fline oracle for solving GFCS ( r n ) gi ven by ( 7 ). F or some special cases such as dominating class of cost functions (Proposition 5 ), the existence of a polynomial-time oracle for solving GFCS ( r n ) is guaranteed. Howe ver , for general nondecreasing cost functions g j ( t ) and arbitrary release times r j , ev en finding the optimal offline schedule on a single machine is strongly NP-hard, with the best kno wn O (log log nP ) -approximation algorithm, where n is the number of jobs, and P is the maximum job length [25]. Surprisingly , if the jobs ha ve identical release times (which is the case for GFCS ( r n ) in Algorithm 2 ), the GFCS ( r n ) problem admits both a polynomial-time (4 + ) -approximation algorithm [31], and a quasi-polynomial time (1 + ) -approximation scheme [32]. Thus, if obtaining an exact solution to GFCS ( r n ) in Algorithm 2 is not av ailable, the approximation algorithms in [31] and [32] serve as good proxies for obtaining near-optimal solutions with polynomial/quasi-polynomial comple xity . Setting Dual V ariables for Algorithm 2 : In order to analyze performance of Algorithm 2 , we first describe a dual-fitting process, henceforth referred to as dual variables gener ated by Algorithm 2 , which adapti vely sets and updates the dual v ariables in response to the run of Algorithm 2 . More precisely , upon arri val of a new job n at time r n , we set the α -dual variable for the ne w job n to its new optimal value α 0 n , which is the one obtained by solving the of fline dual program ( 2 ) with identical release times r n and job lengths { v j ( r n ) , j ∈ A 0 ( r n ) } . Moreover , we replace the tail of the old β -variable { β t } t ≥ r n (i.e., the portion of β -dual v ariables that appear after time t ≥ r n ) with the new optimal dual variable { β 0 t } t ≥ r n obtained by solving ( 2 ). All other dual v ariables { α j } j 6 = n and { β t } t T := P n − 1 j =1 v j . Upon arri val of the job n at time r n , the algorithm updates its primal and dual solutions for t ≥ r n to those obtained from solving RNF 0 ( r n ) . W e use { x 0 j ( t ) ∈ { 0 , 1 } : j ∈ A ( r n ) , t ≥ r n } and ( { α 0 j } j ∈A ( r n ) , { β 0 t } t ≥ r n ) , respectiv ely , to denote the optimal primal/dual solutions. Again, we note that by the monotonicity of g j ( · ) , we have β 0 t = 0 , x 0 j ( t ) = 0 , ∀ t > T + v n . Next, we compute the cost increment of the algorithm due to the introduction of the ne w job n . For simplicity , let us first assume v n = 1 . Also, assume that solving RNF 0 ( r n ) assigns job n to a time slot t 0 ≥ r n (i.e., x 0 n ( t 0 ) = 1 ). If t 0 > T , then the ne w and old solutions are identical, except that no w one extra unit of flo w is sent over the edge ( n, t 0 ) . Therefore, the increase in the flo w cost is exactly ∆ n ( Alg ) = g n ( t 0 ) . Otherwise, if t 0 ∈ [ r n , T ] , it means that slot t 0 was assigned by the old solution to a job j 1 ∈ A ( r n ) . Therefore, the ne w solution must reschedule j 1 to a different time slot t 1 6 = t 0 . Note that t 1 ≥ r n , since in the ne w solution only the slots that are after r n are reassigned based on RNF ( r n ) . Similarly , if t 1 > T , then the change in the cost of the algorithm is exactly ∆ n ( Alg ) = g n ( t 0 ) − g j 1 ( t 0 ) + g j 1 ( t 1 ) . Otherwise, slot t 1 was assigned by the old solution to some job j 2 ∈ A ( r n ) , and hence, the new solution should reassign job j 2 to another slot t 3 ≥ r n . By repeating this argument, we obtain an alternating path of job-slots P := n, t 0 , j 1 , t 1 , . . . , j p , t p that starts from job n and ends Fig. 3. The left and right figures illustrate the optimal flow before and after the addition of the unit length job n , respectiv ely . j 1 and j 2 are two aliv e jobs at time r n with lengths v j 1 ( r n ) = 2 and v j 2 ( r n ) = 3 , which are represented by red and blue colors, respecti vely . Each solid edge ( j, t ) shows whether a unit of job j is scheduled at time slot t , with a cost given by the value on that edge. By adding job n , the ne w optimal flo w in the right figure can be obtained by remo ving (unscheduling) the dashed edges with neg ative signs and adding (scheduling) the ne w solid edges with plus signs. The result is an alternating path P := n, t 0 , j 1 , t 1 , j 2 , t 2 . The change in the optimal flow cost is the sum of the edge costs along P with respect to plus/minus signs. at some slot t p > T . Now , starting from the old solution, we can rematch jobs to slots along the path P to obtain the new solution (see Figure 3 ). In particular, the increase in the cost of the algorithm is precisely the rematching cost along the path P , i.e., ∆ n ( Alg ) = g n ( t 0 ) − g j 1 ( t 0 ) + g j 1 ( t 1 ) − . . . + g j p − 1 ( t p − 1 ) − g j p ( t p − 1 ) + g j p ( t p ) . (18) On the other hand, we know that ( { α 0 j } j ∈A ( r n ) , { β 0 t } t ≥ r n ) is the optimal dual solution to RNF 0 ( r n ) . Using complementary slackness and dual feasibility of that solution along path P , we hav e β 0 t 0 = α 0 n v n − g n ( t 0 ) , α 0 j 1 v j 1 ( r n ) ≤ β 0 t 0 + g j 1 ( t 0 ) , β 0 t 1 = α 0 j 1 v j 1 ( r n ) − g j 1 ( t 1 ) , α 0 j 2 v j 2 ( r n ) ≤ β 0 t 1 + g j 2 ( t 1 ) , . . . β 0 t p − 1 = α 0 j p − 1 v j p − 1 ( r n ) − g j p − 1 ( t p − 1 ) , α 0 j p v j p ( r n ) ≤ β 0 t p − 1 + g j p ( t p − 1 ) , β 0 t p = α 0 j p v j p ( r n ) − g j p ( t p ) , (19) where the left side equalities are due to complementary slackness conditions for the optimal solution ( { α 0 j } j ∈A ( r n ) , { β 0 t } t ≥ r n ) ov er the nonzero flo w edges ( n, t 0 ) , ( j 1 , t 1 ) , . . . , ( j p , t p ) (as x 0 n ( t 0 ) = . . . = x 0 j p ( t p ) = 1 ). The right side inequalities in ( 19 ) are due to the dual feasibility of ( { α 0 j } j ∈A ( r n ) , { β 0 t } t ≥ r n ) for RNF ( r n ) , which are written for the job-slot pairs ( j 1 , t 0 ) , ( j 2 , t 1 ) , . . . , ( j p , t p − 1 ) . (Note that all the jobs in RNF ( r n ) hav e identical release times r n , so { α 0 j } j ∈A ( r n ) must satisfy the dual constraints ∀ t ≥ r n .) By summing all the relations in ( 19 ), we get β 0 t p ≤ α 0 n v n − g n ( t 0 ) + g j 1 ( t 0 ) − g j 1 ( t 1 ) + g j 2 ( t 1 ) − . . . + g j p ( t p − 1 ) − g j p ( t p ) = α 0 n v n − ∆ n ( Alg ) , where the last equality is by ( 18 ). Since by dual feasibility , β 0 t p ≥ 0 and v n = 1 , we get ∆ n ( Alg ) ≤ α 0 n . No w , if v n > 1 , then instead of one path P we will have v n edge disjoint paths P 1 , . . . .P v n , meaning that no job-slot pair ( j, t ) appears more than once in all those paths, simply because each edge ( j, t ) in RNF ( r n ) has a capacity of 1 , so each time slot t is matched to at most one job in either the old or ne w solution. Thus, all the abov e analysis can be carried ov er each path P ` , ` = 1 , . . . , v n separately , and we hav e ∆ P ` ( Alg ) ≤ α 0 n v n ∀ ` , where ∆ P ` ( Alg ) denotes the increment in the algorithm’ s cost along the path P ` . As all the paths are edge-disjoint, the total cost increment of the algorithm equals ∆ n ( Alg ) = P v n ` =1 ∆ P ` ( Alg ) ≤ P v n ` =1 α 0 n v n = α 0 n . Definition 5: A class of nondecreasing differentiable cost functions H = { g ` ( t ) : g ` (0) = 0 } is called monotone substitute if adding a ne w job to the offline instance with identical release time can only postpone the optimal scheduling interv als of the existing jobs. For instance, any dominant family of cost functions has the monotone substitute property . Also, any class of nondecreasing cost functions for which the HDF (or HRDF) is the optimal offline policy has monotone substitute property . More generally , any f amily of nondecreasing cost functions with an insertion type optimal of fline policy (i.e., a policy which inserts the ne w job some where between the pre viously scheduled jobs) possesses monotone substitute property . Now we are ready to state the main result of this section. Theor em 3: Let H = { g ` ( t ) : g ` (0) = 0 } be a monotone substitute class of cost functions. Then Algorithm 2 is 2 K -speed 2 -competitiv e for the GFCS problem where K = 1 + sup `,t ≥ r ` ( t − r ` ) g 00 ` ( t ) g 0 ` ( t ) . Pr oof: As before, let V o ( v o ( t ) , t ) denote the optimal value function associated with the of fline optimal control problem ( 7 ) (or , equiv alently , RNF ( r n ) ) in the absence of job n . Then, V o ( v o ( t ) , t ) = X ` ∈A ( t ) Z ∞ t g ` ( τ ) x o ` ( τ ) dτ = X ` ∈A ( t ) n ` X d =1 Z C 2 d ` C 2 d − 1 ` g ` ( τ ) dτ , where { x o ( τ ) , τ ≥ r n } is the optimal control for ( 7 ), and I ` := [ C 1 ` , C 2 ` ) ∪ . . . ∪ [ C 2 n ` − 1 ` , C 2 n ` ` ) are the subinterv als in which job ` is scheduled by the optimal control, i.e., x o ` ( t ) = 1 , ∀ t ∈ I ` and x o ` ( t ) = 0 , otherwise. Note that here, C ` := C 2 n ` ` is the optimal completion time of job ` for the offline instance ( 7 ). On the other hand, from ( 13 ) we know that the optimal β -v ariables to ( 2 ) with identical release times r n in the absence of job n are giv en by β t = ∂ ∂ t V o ( v o ( t ) , t ) , ∀ t ≥ r n . Thus, for any t ≥ r n , β t = ∂ ∂ t V o ( v o ( t ) , t ) = lim δ → 0 + V o ( v o ( t ) , t + δ ) − V o ( v o ( t ) , t ) δ ≤ lim δ → 0 + 1 δ X ` ∈A ( t ) n ` X d =1 Z C 2 d ` + δ C 2 d − 1 ` + δ g ` ( τ ) dτ − V o ( v o ( t ) , t ) = lim δ → 0 + 1 δ X ` ∈A ( t ) n ` X d =1 Z C 2 d ` + δ C 2 d − 1 ` + δ g ` ( τ ) dτ − Z C 2 ` ` C 2 d − 1 ` g ` ( τ ) dτ = X ` ∈A ( t ) n ` X d =1 [ g ` ( C 2 d ` ) − g ` ( C 2 d − 1 ` )] := ˆ β t , (20) where the inequality holds because we can upper-bound the optimal cost V o ( v o ( t ) , t + δ ) by follo wing a suboptimal schedule that processes the jobs in the same order as the optimal schedule for V o ( v o ( t ) , t ) . The only difference here is that since the initial time t is shifted by δ to the right, all the other scheduling subinterv als will also be shifted to the right by δ . By carrying exactly the same analysis in the pr esence of job n , we can find an upper bound for the new solution β 0 t as β 0 t ≤ X ` ∈A 0 ( t ) n 0 ` X d =1 [ g ` ( C 0 2 d ` ) − g ` ( C 0 2 d − 1 ` )] := ˆ β 0 t , where the prime parameters are associated with the RNF 0 ( r n ) instance in the presence of job n . Next, we note that setting the β -dual variable higher than those generated by Algorithm 2 still preserves dual feasibility . So instead of using optimal β -v ariables { β 0 t } t ≥ r n in the dual update process of Algorithm 2 , we can use their upper bounds { ˆ β 0 t } t ≥ r n while keeping the choice of α -v ariables as before. This approach, in view of Lemma 5 , guarantees that the generated dual variables are still feasible solutions to the dual program ( 2 ). Note that this additional change in the dual updating process is merely for the sake of analysis and has nothing to do with the algorithm implementation. No w let us assume that the machine in the optimal offline benchmark has a slower speed of 1 1+ , meaning that the optimal benchmark aims to find a schedule for minimizing the slower LP: min X j Z ∞ r j g j ( t ) x j ( t ) dt max X j α j − 1 1 + Z ∞ 0 β t dt subject to Z ∞ r j x j ( t ) v j ≥ 1 , ∀ j subject to α j v j ≤ β t + ρ j g ( t ) , ∀ j, t ≥ r j X j x j ( t ) ≤ 1 1 + , ∀ t, α j , β t ≥ 0 , ∀ j, t. x j ( t ) ≥ 0 , ∀ j, t. (21) Note that any feasible dual solution that is generated by the algorithm for the unit speed LP ( 2 ) will also be feasible to the dual of the slower system ( 21 ), as they both share the same constraints. Upon the arri val of a ne w job n at time r n , we just showed that the new dual solution generated by the algorithm is feasible, where we recall that only the tail of the dual solution will be updated from { ˆ β t } t ≥ r n to { ˆ β 0 t } t ≥ r n . As we keep { α j } n − 1 j =1 unchanged, the cost increment of the updated dual solution with respect to the slower system ( 21 ) equals ∆ s ( D ) = α 0 n − 1 1+ R ∞ r n ( ˆ β 0 t − ˆ β t ) dt . Thus, by using Lemma 6 we obtain ∆ n ( Alg ) ≤ α 0 n = ∆ s ( D ) + 1 1 + Z ∞ r n ( ˆ β 0 t − ˆ β t ) dt. (22) Let I r j := [ C 2 r − 1 j , C 2 r j ) be the r th subinterv al in which job j is scheduled by the optimal policy , and define g ` ( I d ` ) := g ` ( C 2 d ` ) − g ` ( C 2 d − 1 ` ) , ∀ `, d . For any t ∈ I r j , we can write ˆ β t gi ven in ( 20 ) as ˆ β t = g j ( C 2 r j ) − g j ( t ) + X I d ` >I r j g ` ( I d ` ) ∀ t ∈ I r j , (23) where the summation is taken over all the subinterv als I d ` on the right side of I r j . W e ha ve Z ∞ r n ˆ β t dt = X j,r Z I r j ˆ β t dt = X j,r Z I r j g j ( C 2 r j ) − g j ( t ) + X I d ` >I r j g ` ( I d ` ) dt = X j,r | I r j | g j ( C 2 r j ) + X I d ` >I r j g ` ( I d ` ) − X j Z I j g j ( t ) dt = X j,r | I r j | g j ( C 2 r j ) + X j,r X I d ` >I r j | I r j | g ` ( I d ` ) − X j Z I j g j ( t ) dt = X j,r | I r j | g j ( C 2 r j ) + X `,d ( X I r j 0 , ∀ t ≥ r ` . As a result, ( t − r ` ) g 00 ` ( t ) g 0 ` ( t ) ≤ 0 , ∀ t ≥ r ` . Thus, by the definition of the curvature ratio, K = 1 + sup `,t ≥ r ` ( t − r ` ) g 00 ` ( t ) g 0 ` ( t ) = 1 . This in vie w of Lemma 1 shows that Algorithm 2 is (1 + ) 2 -speed (1+ ) 2 2 -competiti ve for the GICS problem. This result is somewhat consistent with the (1 + ) -speed 4(1+ ) 2 2 -competiti ve online algorithm in [3, Theorem 9] that was giv en for GICS with concav e costs but under a relaxed rate allocation setting. The class of increasing and dif ferentiable concav e functions includes logarithmic functions g ` ( t ) = w ` log(1 + t ) that are frequently used for de vising proportional fair scheduling algorithms [10]. It is known that no online algorithm can be O (1) -speed O (1) -competitiv e for GFCS [19, Theorem 3.3]. Thus, the fact that the required speed to achie ve a constant competitiv e ratio in Theorem 3 depends on the curv ature of cost functions seems unav oidable. In fact, the curv ature ratio K giv en in Theorem 3 is only one way of capturing this dependency . Ho wev er, to obtain a better performance guarantee, one needs to obtain tighter bounds on the increase of dual objectiv e function along the solution generated by the online algorithm. Consequently , that requires finding better dual solutions using the HJB v alue function approximation. Unfortunately , choosing better dual solutions for general cost functions is very challenging without imposing additional assumptions on the structure of the cost functions. Having said that, it may be that the curvature ratio giv en in Theorem 3 is close to optimal. If it is the case, it would be interesting to establish a matching lo wer bound. V . A C O M P E T I T I V E O N L I N E A L G O R I T H M F O R T H E G F C U P R O B L E M The GFCS problem can be naturally extended to multiple unrelated machines. Here we assume that there are m ≥ 2 unrelated machines and that jobs are released online over time. Upon arriv al of a job, a feasible online schedule must dispatch that job to one machine, and a machine can work preemptiv ely on at most one unfinished job that is assigned to it. W e only allo w nonmigratory schedules in which a job cannot migrate from one machine to another once it has been dispatched. W e assume that job j has a processing requirement v ij if it is dispatched to machine i with an associated cost function ˆ g ij ( t ) . Moreov er , we assume that the specifications of job j are re vealed to the system only upon j ’ s arri val at time r j . Gi ven a feasible online schedule, we let J i be the set of jobs that are dispatched to machine i , and C j be the completion time of job j under that schedule. Therefore, our goal is to find a feasible online schedule that dispatches the jobs to the machines and processes them preempti vely on their assigned machines so as to minimize the generalized inte gral completion time on unrelated machines (GICU) giv en by P i P j ∈ J i ˆ g ij ( C j ) . As before, and using Lemma 1 adapted for multiple machines, we only consider the fractional version of that objectiv e cost, where the remaining portion v ij ( t ) v ij of a job j that is dispatched to a machine i contributes ˆ g 0 ij ( t ) amount to the delay cost. Therefore, if we use g ij ( t ) := ˆ g ij ( t ) v ij to denote the scaled cost functions, the objectiv e cost of a feasible schedule for the generalized fractional completion time on unrelated machines (GFCU) is gi ven by X i X j ∈ J i Z ∞ r j v ij ( t ) v ij ˆ g 0 ij ( t ) dt = X i X j ∈ J i Z ∞ r j ˆ g ij ( t ) v ij x ij ( t ) dt = X i X j ∈ J i Z ∞ r j g ij ( t ) x ij ( t ) dt, (27) where x ij ( t ) = − d dt v ij ( t ) is the rate at which job j ∈ J i is processed by the schedule, and the first equality holds by integration by parts and the assumption g ij ( r j ) = 0 , ∀ i, j . The following lemma provides a lower bound for the objectiv e cost of the GFCU problem, which is obtained by relaxing the requirement that a job must be processed on only one machine. W e will use this LP relaxation as an of fline benchmark when we devise a competiti ve online schedule. The deriv ation of such LP resembles that in [4], which is deri ved here for generalized cost functions. Lemma 7: The cost of the follo wing LP is at most twice the cost of HGFC on unrelated machines: min X i,j Z ∞ r j g ij ( t ) + d ij x ij ( t ) dt subject to X i Z ∞ r j x ij ( t ) v ij dt ≥ 1 , ∀ j X j x ij ( t ) ≤ 1 , ∀ i, t x ij ( t ) ≥ 0 , ∀ i, j, t, (28) where d ij := R r j + v ij r j g ij ( t ) v ij dt are constants. Pr oof: Giv en an arbitrary feasible schedule, let J i denote the set of all the jobs that are dispatched to machine i at the end of the process, C j be the completion time of job j , and x s ij ( t ) be the rate at which the schedule processes job j ∈ J i . Since in a feasible schedule, a machine i can process at most one job at any time t , we must hav e P j ∈ J i x s ij ( t ) ≤ 1 , x s ij ∈ { 0 , 1 } , ∀ i, t . Moreov er , as a feasible schedule must process a job entirely , we must have R ∞ r j x s ij ( t ) v ij dt ≥ 1 , ∀ i, j ∈ J i . Thus a solution x s ( t ) produced by any feasible schedule must satisfy all the constraints in ( 28 ) that are relaxations of the length and speed requirement constraints. In fact, the constraints in ( 28 ) allow a job to be dispatched to multiple machines or ev en to be processed simultaneously with other jobs. Howe ver , such a relaxation can only reduce the objecti ve cost and gi ves a stronger benchmark. Finally , the LP cost of the feasible solution x s ( t ) equals X i,j Z ∞ r j g ij ( t ) + d ij x s ij ( t ) dt = X i X j ∈ J i Z ∞ r j g ij ( t ) x s ij ( t ) dt + X i X j ∈ J i Z ∞ r j d ij x s ij ( t ) dt. (29) Using the definition of d ij , and since for any optimal schedule R ∞ r j x s ij ( t ) dt = v ij , ∀ j ∈ J i , we have, Z ∞ r j d ij x s ij ( t ) dt = Z r j + v ij r j g ij ( t ) dt ≤ Z ∞ r j g ij ( t ) x s ij ( t ) dt, (30) where the inequality holds by monotonicity of g ij ( t ) , as R ∞ r j g ij ( t ) x s ij ( t ) dt is minimized when x s ij ( t ) = 1 for t ∈ [ r j , r j + v ij ] and x s ij ( t ) = 0 , otherwise. By substituting ( 30 ) into ( 29 ), we find that the LP objecti ve cost of the schedule is at most 2 P i P j ∈ J i R ∞ r j g ij ( t ) x s ij ( t ) dt , which is twice the fractional cost by the schedule giv en in ( 27 ). Thus, the minimum value of LP ( 28 ) is at most twice the minimum fractional cost generated by any feasible schedule. Finally , we note that the dual program for LP ( 28 ) is given by max X j α j − X i Z ∞ 0 β it dt subject to α j v ij ≤ β it + g ij ( t ) + d ij , ∀ i, j, t ≥ r j α j , β it ≥ 0 , ∀ i, j, t. (31) In the follo wing section, we first provide a primal-dual online algorithm for the GFCU problem. The algorithm decisions on how to dispatch jobs to machines and process them are guided by a dual solution that is updated frequently upon the arri val of a ne w job . The process of updating dual variables is mainly motiv ated by the insights obtained from the case of a single machine with some additional changes to cope with multiple unrelated machines. W e then sho w in Lemma 8 that the dual solution generated throughout the algorithm is feasible to the dual program ( 31 ), which by Lemma 7 and weak duality gives a lo wer bound for the optimal value of the offline benchmark. Finally , we bound the gap between the objectiv e cost of the algorithm and the cost of the generated dual solution, which allows us bound the competitiv e ratio of the algorithm. A. Algorithm Design and Analysis T o design an online algorithm for GFCU, we need to introduce an effecti ve dispatching rule. Consider an arbitrary but fixed machine i and assume that currently the aliv e jobs on machine i are scheduled to be processed ov er time intervals { I ` , ` ∈ A ( r n ) } , where we note that each I ` can itself be the union of disjoint subintervals I ` = ∪ d I d ` . From the lesson that we learned in the proof of Theorem 3 , we shall set the β -dual variables for machine i to ˆ β it = P ` ∈A ( t ) g i` ( I ` ∩ [ t, ∞ )) , where g i` ( I ` ∩ [ t, ∞ )) := P d g i` ( I d ` ∩ [ t, ∞ )) is the total variation of function g i` ( t ) ov er I ` ∩ [ t, ∞ ) . Unfortunately , upon release of a new job n at time r n , we cannot set the ne w α -v ariable for job n , denoted by ˆ α 0 n , as high as that in the case of a single machine, i.e., α 0 n . The reason is that choosing ˆ α 0 n = α 0 n may not be feasible with respect to the old ˆ β i 0 t -v ariables of other machines i 0 6 = i . T o circumvent that issue, in the case of multiple machines, we slightly sacrifice optimality in fav or of generating a feasible dual solution. For that purpose, we do not set ˆ α 0 n as high as before, b ut rather define it in terms of the old ˆ β it -v ariables. Ideally , we want to set ˆ α 0 n equal to min t ≥ r n { ( ˆ β it + g in ( t ) + d in ) v in } , so that if instead of ˆ β it , we had the new optimal β 0 it -v ariables, then we would hav e obtained the same α 0 n as before. Clearly , such an assignment of an α -variable to job n is feasible with respect to the ˆ β it of machine i . Ho wev er, to assure that it is also feasible for all other machines, we take another minimum over all the machines by setting ˆ α 0 n := min i,t ≥ r n { ( ˆ β it + g in ( t ) + d in ) v in } . (32) That guarantees that the ne w dual variable ˆ α 0 n is also feasible with respect to the ˆ β it -v ariables of all the other machines. Thus, if we let i ∗ = arg min i { min t ≥ r n ( ˆ β it + g in ( t ) + d in ) v in } , we dispatch job n to the machine i ∗ . On the other hand, to assure that the future dual v ariables ˆ α 0 n +1 , ˆ α 0 n +2 , . . . are set as high as possible, we shall update the old ˆ β i ∗ t -v ariables for machine i ∗ to their updated versions ˆ β 0 i ∗ t ; doing so also accounts for the newly released job n . W e do so by inserting the ne w job n into the old schedule to obtain updated scheduling intervals I 0 ` = ∪ d I 0 d ` for machine i ∗ , and accordingly define ˆ β 0 i ∗ t = P ` ∈A 0 ( t ) g i ∗ ` ( I 0 ` ∩ [ t, ∞ )) based on this new schedule. As, by complementary slackness conditions, a job is scheduled whenev er its dual constraint is tight, we insert job n into the old schedule at time t ∗ = argmin t ≥ r n ( ˆ β i ∗ t + g i ∗ n ( t ) + d i ∗ n ) v i ∗ n (which is the time at which the dual constraint for job n on machine i ∗ is tight) and schedule it entirely over [ t ∗ , t ∗ + v i ∗ n ] . Note that this insertion causes all the old scheduling subintervals on machine i ∗ that were after time t ∗ to be shifted to the right by v i ∗ n , while the scheduling subinterv als that were before time t ∗ remain unchanged, as in the old schedule. The abo ve procedure in summarized in Algorithm 3 . Time Complexity of Algorithm 3 : Upon arriv al of a ne w job n , Algorithm 3 needs to find the scheduling time t ∗ , which requires solving the minimization problem arg min t ≥ r n { ˆ β it + d in + g in ( t ) } for each machine i , and then taking the minimum over all the machines in O ( m ) . Moreover , using ( 23 ), one can see that ˆ β it = P ` ∈A ( t ) g i` ( I ` ∩ [ t, ∞ )) has the form of ˆ β it = L − g ij ( t ) , for some constant L and some job j that is scheduled at time t . W e note that unlike Algorithm 2 , the scheduling intervals I ` are not necessarily the optimal of fline scheduling intervals. Instead, those interv als are constructed inducti vely according to the rules of Algorithm 3 , which sa ves in the optimal of fline computational cost. Since Algorithm 3 inserts each new job somewhere between the pre viously scheduled jobs, the Algorithm 3 An Online Algorithm for the GFCU Problem Input: An instance of the GFCU problem { v ij , r j , g ij ( t ) , i ∈ [ m ] , j = 1 , 2 , . . . } with nondecreasing con ve x cost functions g ij ( t ) . Output: An online nonmigratory schedule that assigns each job to a single machine and determines what job must be processed on each machine at any time t ≥ 0 . • Upon arriv al of a new job n at time r n , let { I ` : ` ∈ A ( r n ) } denote the old scheduling subintervals in the absence of job n for (an arbitrary) machine i . Let ˆ β it = P ` ∈A ( t ) g i` ( I ` ∩ [ t, ∞ )) be the old ˆ β it -v ariables associated with the old schedule on machine i . • Dispatch job n to machine i ∗ for which i ∗ = arg min i { min t ≥ r n ( ˆ β it + g in ( t ) + d in ) v in } , and let t ∗ be the minimizing time, that is t ∗ = argmin t ≥ r n ( ˆ β i ∗ t + g i ∗ n ( t ) + d i ∗ n ) v i ∗ n . • Form a ne w schedule by only modifying the scheduling intervals on machine i ∗ as follo ws: Over the interval [ r n , t ∗ ] , process the jobs on machine i ∗ based on the old schedule. Schedule the new job n entirely on machine i ∗ ov er the interv al I 0 n = [ t ∗ , t ∗ + v i ∗ n ] . Shift all the remaining old scheduling interv als on machine i ∗ which are after t ∗ to the right by v i ∗ n . • Update the tail of the old ˆ β i ∗ t -v ariables for machine i ∗ from { ˆ β i ∗ t } t ≥ r n to { ˆ β 0 i ∗ t } t ≥ r n , where ˆ β 0 i ∗ t = P ` ∈A 0 ( t ) g i ∗ ` ( I 0 ` ∩ [ t, ∞ )) , and { I 0 ` : ` ∈ A 0 ( t ) } are the ne w scheduling interv als on machine i ∗ that are obtained from the pre vious stage. Keep all other dual variables { ˆ β it } i 6 = i ∗ unchanged. arri val of a ne w job can increase the number of scheduling subintervals by at most 2 . As a result, ˆ β it is a continuous and piecewise monotone concav e function with at most O ( n ) pieces, which can be constructed ef ficiently . Therefore, solving arg min t ≥ r n { ˆ β it + d in + g in ( t ) } requires minimizing the dif ference of two monotone and smooth con vex functions ov er at most O ( n ) disjoint subintervals within the support of ˆ β it . Thus, Algorithm 3 has an ov erall runtime O ( nmT u ) , where T u is the time complexity of minimizing the difference of two monotone and smooth uni variate con ve x functions ov er an interv al. Lemma 8: Assume that { g i` ( t ) , ∀ i, ` } are nondecreasing con vex functions. Then, the dual solution generated by Algorithm 3 is feasible for the dual program ( 31 ). Pr oof: As we ar gued abo ve, the ne w dual v ariable ˆ α 0 n is feasible with respect to the ˆ β it -v ariables of all the machines and for any t ≥ r n . Since we keep all other dual variables { ˆ α j } n − 1 j =1 and { ˆ β it } i 6 = i ∗ unchanged, it is enough to show that ˆ β 0 i ∗ t ≥ ˆ β i ∗ t , ∀ t ≥ r n . This inequality also follows from the definition of ˆ β -v ariables and the conv exity of cost functions g i` ( · ) . More precisely , for any t ≥ r n , ˆ β i ∗ t = X ` ∈A ( t ) g i ∗ ` ( I ` ∩ [ t, ∞ )) , ˆ β 0 i ∗ t = X ` ∈A 0 ( t ) g i ∗ ` ( I 0 ` ∩ [ t, ∞ )) , where we note that at any time t , A ( t ) ⊆ A 0 ( t ) (since by definition A 0 ( t ) contains all the jobs in A ( t ) and possibly the new job n ). As for any `, d , the subinterval I 0 d ` is either the same as I d ` , or shifted to the right by v i ∗ n ; by the con vexity and monotonicity of g i ∗ ` ( · ) we hav e g i ∗ ` ( I 0 d ` ∩ [ t, ∞ )) ≥ g i` ( I d ` ∩ [ t, ∞ )) , ∀ d . Summing this relation for all d and ` ∈ A 0 ( t ) shows that ˆ β 0 it ≥ ˆ β i ∗ t . Thus, ˆ β 0 i ∗ t can only increase because of the final stage of Algorithm 3 , so dual feasibility is preserved. Theor em 4: Let H = { g i` ( t ) : g i` (0) = 0 } be a family of differentiable nondecreasing con vex functions. Then, Algorithm 3 is 2 K θ -speed 2 θ -competitiv e for the GFCU problem, where K := 1 + sup i,`,t ≥ r ` ( t − r ` ) g 00 i` ( t ) g 0 i` ( t ) , θ := sup i,`,t ≥ r ` g i` ( t + v ) − g i` ( t ) v g 0 i` ( t ) . Pr oof: First, let us assume that each machine in the optimal algorithm has a slo wer speed of 1 1+ . Therefore, using Lemma 7 , the following LP and its dual provide a lo wer bound (up to a factor of 2) for the optimal fractional cost of an y schedule with slo wer unrelated machines. min X i,j Z ∞ r j ( g ij ( t ) + d ij ) x ij ( t ) dt max X j α j − 1 1 + X i Z ∞ 0 β it dt subject to X i Z ∞ r j x ij ( t ) v ij ≥ 1 , ∀ j subject to α j v ij ≤ β it + g ij ( t ) + d ij , ∀ i, j, t ≥ r j X j x ij ( t ) ≤ 1 1 + , ∀ i, t α j , β it ≥ 0 , ∀ i, j, t x ij ( t ) ≥ 0 , ∀ i, j, t. (33) By Lemma 8 , the dual solution generated by Algorithm 3 is feasible for ( 31 ), and thus, it is also dual feasible for the slower system ( 33 ). Now , upon arriv al of job n at time r n , let us assume that the algorithm dispatches n to machine i = i ∗ , which from now we fix this machine. Thus, the increment in the (slower) dual objecti ve of the feasible solution generated by the algorithm equals ∆ s ( D ) = ˆ α 0 n − 1 1+ R ∞ r n ( ˆ β 0 it − ˆ β it ) dt . Unfortunately , since in general we may ha ve ˆ α 0 n ≤ α 0 n , we can no longer use Lemma 6 to upper-bound the cost increment of the algorithm. Instead, we upper-bound ∆ n ( Alg ) in terms of ˆ α 0 n directly , and that causes an additional loss factor in the competitiv e ratio. T o that end, let t ∗ = arg min t ≥ r n { ˆ β it + d in + g in ( t ) } . W e note that before time t ∗ , the old and new schedules are the same, and thus R t ∗ + v in t ∗ g in ( t ) dt is the new cost due to the scheduling of job n . Moreover , the cost increment between the old and ne w schedules after time t ∗ , equals X ` ∈A ( t ∗ ) Z ( I ` ∩ [ t ∗ , ∞ ))+ v in g i` ( t ) dt − X ` ∈A ( t ∗ ) Z I ` ∩ [ t ∗ , ∞ ] g i` ( t ) dt = X ` ∈A ( t ∗ ) Z I ` ∩ [ t ∗ , ∞ ] ( g i` ( t + v in ) − g i` ( t )) dt. (34) Since we set ˆ α 0 n = v in ( ˆ β it ∗ + d in + g in ( t ∗ )) , we can write ∆ n ( Alg ) ˆ α 0 n = ∆ n ( Alg ) v in ( ˆ β it ∗ + d in + g in ( t ∗ )) = R t ∗ + v in t ∗ g in ( t ) dt + P ` ∈A ( t ∗ ) R I ` ∩ [ t ∗ , ∞ ) ( g i` ( t + v in ) − g i` ( t )) dt v in ( d in + g in ( t ∗ )) + v in P ` ∈A ( t ∗ ) R I ` ∩ [ t ∗ , ∞ ) g 0 i` ( t ) dt . Since by the definition of θ we ha ve g i` ( t + v in ) − g i` ( t ) ≤ θ v in g 0 i` ( t ) , ∀ i, `, t ≥ r ` and R t ∗ + v in t ∗ g in ( t ) dt ≤ θ v in ( d in + g in ( t ∗ )) , we conclude that ∆ n ( Alg ) ˆ α 0 n ≤ θ . Therefore, ∆ n ( Alg ) ≤ θ ˆ α 0 n = θ ∆ s ( D ) + θ 1 + Z ∞ r n ( ˆ β 0 it − ˆ β it ) dt. (35) By follo wing the e xact same analysis used for the case of the single machine, we kno w that Z ∞ r n ˆ β it = X ` ∈A ( r n ) Z I ` ( t − r n ) g 0 i` ( t ) dt = X ` ∈A ( r n ) Z I ` ∩ [ r n ,t ∗ ) ( t − r n ) g 0 i` ( t ) dt + Z I ` ∩ [ t ∗ , ∞ ) ( t − r n ) g 0 i` ( t ) dt , Z ∞ r n ˆ β 0 it = X ` ∈A ( r n ) ∪{ n } Z I 0 ` ( t − r n ) g 0 i` ( t ) dt = Z t ∗ + v in t ∗ ( t − r n ) g 0 in ( t ) dt + X ` ∈A ( r n ) Z I ` ∩ [ r n ,t ∗ ) ( t − r n ) g 0 i` ( t ) dt + Z ( I ` ∩ [ t ∗ , ∞ ))+ v in ( t − r n ) g 0 i` ( t ) dt . Thus, the difference between the abov e two e xpressions is gi ven by Z ∞ r n ( ˆ β 0 it − ˆ β it ) dt = Z t ∗ + v in t ∗ ( t − r n ) g 0 in ( t ) dt + X ` ∈A ( t ∗ ) Z ( I ` ∩ [ t ∗ , ∞ ))+ v in ( t − r n ) g 0 i` ( t ) dt − Z I ` ∩ [ t ∗ , ∞ ) ( t − r n ) g 0 i` ( t ) dt . No w let us define h ` ( t ) := ( t − r n ) g 0 i` ( t ) − K g i` ( t ) . Then, Z ∞ r n ( ˆ β 0 it − ˆ β it ) dt − K ∆ n ( Alg ) = Z t ∗ + v in t ∗ h n ( t ) dt + X ` ∈A ( t ∗ ) Z ( I ` ∩ [ t ∗ , ∞ ))+ v in h ` ( t ) dt − Z I ` ∩ [ t ∗ , ∞ ) h ` ( t ) dt . (36) On the other hand, for e very ` , h ` ( t ) is a nonincreasing function. The reason is that h 0 ` ( t ) = ( t − r n ) g 00 i` ( t ) − ( K − 1) g 0 i` ( t ) ≤ ( t − r ` ) g 00 i` ( t ) − ( K − 1) g 0 i` ( t ) ≤ 0 , where the first inequality is due to the con ve xity of g i` ( t ) (as g 00 i` ( t ) ≥ 0 ) and the fact that r ` ≤ r n , and the second inequality is by definition of the constant K . This, in turn, implies that Z ( I ` ∩ [ t ∗ , ∞ ))+ v in h ` ( t ) dt ≤ Z I ` ∩ [ t ∗ , ∞ ) h ` ( t ) dt, ∀ `. Moreov er , as h n ( r n ) = − K g in ( r n ) = 0 , we have h n ( t ) ≤ 0 , ∀ t ≥ r n , and thus R t ∗ + v in t ∗ h n ( t ) dt ≤ 0 . By substituting those relations into ( 36 ), we can conclude that R ∞ r n ( ˆ β 0 i ∗ t − ˆ β i ∗ t ) dt ≤ K ∆ n ( Alg ) . By substituting this inequality into ( 35 ) and summing over all the jobs, we obtain Cost ( Alg ) ≤ θ Cost ( D s ) + θ K 1 + Cost ( Alg ) , or , equi valently , Cost ( Alg ) ≤ (1+ ) θ 1+ − K θ Cost ( D s ) , where D s is the optimal value of the slo wer dual program ( 33 ). Finally , if we choose the speed 1 + = 2 K θ , the competitive ratio of the algorithm for the GFCU problem is at most 2 θ . Example 4: As a simple application of Theorem 4 , if we consider an instance of GFCU with quadratic cost functions of the form g i` ( t ) = a i` t 2 + b i` t + c i` with nonnegati ve coef ficients and jobs of at most a unit in length, then we have K = 1 + sup i,`,t ≥ r ` 2 a i` ( t − r ` ) 2 a i` t + b i` ≤ 2 and θ = 1 + sup i,`,t ≥ v a i` v 2 a i` t + b i` ≤ 2 . Thus, for this class of quadratic cost functions Algorithm ( 3 ) is 8 -speed 4 -competitiv e. V I . C O N C L U S I O N S A N D F U T U R E D I R E C T I O N S In this paper , we considered online scheduling on single or multiple unrelated machines under general job and machine-dependent cost functions. Using results from optimal control and LP duality , we provided a framew ork for devising competiti ve online algorithms in a speed-augmented setting and under some mild assumptions on the structure of the cost functions. Here, we focused on a nonmigratory preempti ve setting in which the machines have fixed speed and can work on a single job at each time instance. Moreov er , we assumed that the processing requirement of jobs is a deterministic value v ij . Ho wev er , it is often more realistic to assume that processing requirements are random variables with certain e xpected v alues. One natural idea for such an extension is to le verage our generalized dual- fitting results when the job requirements are replaced by their expected values. Surprisingly , it has been sho wn recently in [33] that for the special case of minimizing the e xpected weighted completion time, dual-fitting can be very helpful to de vise competiti ve online algorithms with respect to the e xpected instance. Therefore, an interesting future direction is to extend this work to stochastic settings with general cost functions using our generalized dual-fitting analysis. In de vising an online algorithm for the GFCS problem, we implicitly assumed access to an oracle for solving the simpler offline subproblem GF C S ( r n ) . Although solving GF C S ( r n ) could be in general NP-hard, as we mentioned earlier , GF C S ( r n ) admits polynomial (quasi-polynomial) time approximation algorithm (scheme). Therefore, combining those results from the offline setting to our online analysis can giv e us competitiv e online algorithms for GFCS with substantially reduced time comple xity . Finally , as we showed abo ve and in Appendix I, optimal control can generalize some of the existing dual-fitting results in the context of job scheduling in a unified manner . Therefore, lev eraging this frame work to design competitiv e online algorithms in more complex job scheduling settings, such as multi-queue multi-server systems with nonlinear client-server assignment costs, would be an interesting future research direction. A P P E N D I X I : A G E N E R A L I Z A T I O N O F T H E E A R L I E R D U A L - F I T T I N G R E S U L T S In this appendix, we apply the results of Section III to a slightly different setting and deriv e a generalization of the dual bounds giv en in [4]. W e use this method to analyze the highest r esidual density first (HRDF) scheduling rule, in which the residual density of a job j at time t is defined to be ρ j ( t ) = w j v j ( t ) . More generally , we can define the residual density of a job j at time t with a cost function g j ( τ ) to be g j ( τ ) v j ( t ) . (Note that for g j ( τ ) = w j , the two definitions coincide.) It has been shown in [4] that for online job scheduling on unrelated machines with g ij ( t ) = w ij ( t − r j ) k , if each machine works based on HRDF and a newly released job is dispatched to the machine that results in the least increase in the ` k -flo w time, then such a scheduling algorithm is competitive in the augmented speed setting with respect to the objecti ve of integral ` k -flo w time P j w i ( j ) j ( C j − r j ) k , where i ( j ) denotes the machine to which job j is dispatched. The analysis in [4] is based on dual fitting and a careful choice of dual variables: ˆ β ir n = k X j ∈A ( r n ) w ij R k − 1 j ( r n ) , ˆ α n = w in R n ( r n ) k + X j ∈A ( r n ) ρ ij ( r n ) <ρ in w ij ( R j ( r n ) + v ij ) k − R j ( r n ) k . (37) Here, i is the machine to which job n is dispatched, and R j ( r n ) = C j − r n is the “remaining” completion time of job j at time r n , where C j denotes the completion time of job j following the HRDF rule. Ho wev er , the choice of the dual variables in [4] is not quite immediate and provides little insight about ho w one can extend those results to more complex cost functions. Here we show ho w these complicated- looking v ariables can be obtained systematically by using a simple application of the optimal control frame work to a special case of the ` k -flo w objecti ve function. It is worth noting that in [4], only the performance of the HRDF schedule for the specific ` k -norm is considered. The optimal control approach that we adopt here can be used in a more general setting for which we first define an optimal v alue function according to a scheduling policy that we wish to analyze, and then carry the machinery in Section III to fit the dual v ariables for that specific policy . T o determine the dual v ariables for HRDF , let us assume that job n is released at some arbitrary time r n and dispatched to machine i by the algorithm. (From no w on, we fix machine i and, for simplicity , drop all the indices that depend on i .) By the definition of the HRDF rule, we know that at time r n , the machine must schedule a job ` with the highest r esidual density g ` ( t ) v ` ( r n ) (rather than the original density ρ ` = g ` ( t ) v ` ) . Therefore, the offline optimal control objectiv e function with identical release times r ` = r n , ∀ ` ∈ A ( r n ) is giv en by min Z ∞ r n X ` ∈A ( r n ) g ` ( t − r n ) v ` ( r n ) x ` ( t ) dt : ˙ v ( t ) = − x ( t ) , v ( r n ) = ( v 1 ( r n ) , . . . , v k ( r n )) T , x ( t ) ∈ X , ∀ t . (38) Note that the only difference between the HRDF formulation ( 38 ) and the earlier formulation ( 7 ) is that the original cost function g ` ( t ) is now scaled by the residual length 1 v ` ( r n ) rather than the original length 1 v ` , and the ar gument in g ` ( t ) is replaced by t − r n , as we are interested in flow time rather than the completion time. T o determine a good fit for ˆ β t , let V o ( v o ( t ) , t ) denote the optimal value function for the offline optimal control problem ( 38 ), i.e., V o ( v o ( t ) , t ) = X ` ∈A ( t ) Z ∞ t g ` ( τ − r n ) v ` ( r n ) x o ` ( τ ) dτ = X ` ∈A ( t ) n ` X d =1 Z C 2 d ` C 2 d − 1 ` g ` ( τ − r n ) v ` ( r n ) dτ , where { x o ( τ ) , τ ≥ r n } is the optimal control to ( 38 ), and I ` := [ C 1 ` , C 2 ` ) ∪ . . . ∪ [ C 2 n ` − 1 ` , C 2 n ` ` ) are the subintervals in which job ` is scheduled by the optimal control. Again C ` := C 2 n ` ` is the optimal completion time of job ` for the of fline instance ( 38 ). On the other hand, from ( 13 ) we know that the optimal of fline dual v ariable is gi ven by β r n = ∂ ∂ r n V o ( v o ( r n ) , r n ) . Thus, β r n = ∂ ∂ r n V o ( v o ( r n ) , r n ) = lim δ → 0 + V o ( v o ( r n ) , r n + δ ) − V o ( v o ( r n ) , r n ) δ ≤ lim δ → 0 + 1 δ X ` ∈A ( r n ) n ` X d =1 Z C 2 d ` + δ C 2 d − 1 ` + δ g ` ( τ − r n ) v ` ( r n ) dτ − V o ( v o ( r n ) , r n ) = lim δ → 0 + 1 δ X ` ∈A ( r n ) n ` X d =1 Z C 2 d ` + δ C 2 d − 1 ` + δ g ` ( τ − r n ) v ` ( r n ) dτ − Z C 2 d ` C 2 d − 1 ` g ` ( τ − r n ) v ` ( r n ) dτ = X ` ∈A ( r n ) 1 v ` ( r n ) n ` X d =1 [ g ` ( C 2 d ` − r n ) − g ` ( C 2 d − 1 ` − r n )] , where the inequality holds because we can upper-bound the optimal cost V o ( v o ( r n ) , r n + δ ) by fol- lo wing a suboptimal test policy that starts from time r n + δ and mimics the same optimal schedule as V o ( v o ( r n ) , r n ) . If we specialize the above relation to the case of con vex functions g ` ( τ − r n ) and note that P d ( C 2 d ` − C 2 d − 1 ` ) = v ` ( r n ) , we can write β r n ≤ X ` ∈A ( r n ) 1 v ` ( r n ) n ` X d =1 [ g ` ( C 2 d ` − r n ) − g ` ( C 2 d − 1 ` − r n )] ≤ X ` ∈A ( r n ) 1 v ` ( r n ) n ` X d =1 g 0 ` ( C 2 d ` − r n )[ C 2 d ` − C 2 d − 1 ` ] ≤ X ` ∈A ( r n ) 1 v ` ( r n ) n ` X d =1 g 0 ` ( C ` − r n )[ C 2 d ` − C 2 d − 1 ` ] = X ` ∈A ( r n ) g 0 ` ( C ` − r n ) , which suggests to set the β -dual variable to ˆ β r n := P ` ∈A ( r n ) g 0 ` ( C ` − r n ) . T o see why that choice of ˆ β r n coincides with the one giv en in ( 37 ), we note that for the special ` k -flo w time, g ` ( τ − r n ) is gi ven by the con vex function g ` ( τ − r n ) = w i` ( τ − r n ) k , and thus ˆ β ir n = k P ` ∈A ( r n ) w i` ( C ` − r n ) k − 1 . Finally we note that for the fixed identical release times r n and homogeneous monotone functions g ` ( τ − r n ) = w i` ( τ − r n ) k , we know from the results of Section II-A that the optimal schedule for the of fline problem ( 38 ) is indeed HDF (which also coincides with HRDF in the offline setting). Thus the optimal completion times C ` gi ven abo ve are precisely those obtained by follo wing HRDF . Next, to fit a dual variable for the optimal α 0 n , we note that setting the α -dual variables lower than the optimal ones alw ays preserves dual feasibility . As we saw in Lemma 6 , ev en for a more general case, ∆ n ( Alg ) ≤ α 0 n ; thus, the lower bound can be chosen to be ˆ α n := ∆ n ( Alg ) = V o ( v ( r n ) ∪ Fig. 4. Upon the arriv al of a ne w job n at time r n , the old tail { ˆ β t } t ≥ r n is updated to the new one { ˆ β 0 t } t ≥ r n . Here the ˆ β -curve is giv en by the upper en velope of the other three curves. The increase in the size of the area under the ˆ β -curve due to the arri val of job n is precisely the increase in the integral flo w cost of the algorithm ∆ n ( Alg ) , which is also set for the dual variable ˆ α n . Summing ov er all jobs gi ves us the ov erall area under the ˆ β -curve and is equal to the integral flo w cost of the algorithm. { n } , r n ) − V o ( v ( r n ) , r n ) , i.e., the increase in the cost of the offline optimal control ( 38 ) due to the addition of a new job n . If we simplify the right side by recalling that the optimal offline solution to ( 38 ) with cost functions g ` ( τ − r n ) = w i` ( τ − r n ) k is HRDF , we obtain precisely the fractional version of ˆ α n -v ariable gi ven in ( 37 ) (the ˆ α n in ( 37 ) is written for the integral objectiv e cost, where V o ( v ( r n ) , r n ) := P j ∈A ( r n ) w i` ( C ` − r n ) k .) Finally , to verify why the above choices of dual variables are indeed good, we sho w that the two terms P n ˆ α n and R ∞ 0 ˆ β that appear in the dual objectiv e cost are indeed the same and equal to the integral flo w cost of the solution generated by the algorithm. The implication is that the dual variables defined above keep the dual objectiv e cost close to the cost of the primal solution generated by the algorithm. T o understand why , we first note that Z ∞ r n ˆ β t dt = Z ∞ r n X ` ∈A ( t ) g 0 ` ( C ` − t ) dt = X ` ∈A ( r n ) Z C ` r n g 0 ` ( C ` − t ) dt = X ` ∈A ( r n ) g ` ( C ` − r n ) , which is the inte gral objectiv e cost after time r n . Similarly , with job n in the system, we have R ∞ r n ˆ β 0 t dt = P ` ∈A 0 ( r n ) g ` ( C 0 ` − r n ) . Thus, R ∞ r n ( ˆ β 0 t − ˆ β t ) dt is precisely the increment in the integral flo w cost due to the arri val of job n , i.e., Z ∞ r n ( ˆ β 0 t − ˆ β t ) dt = ∆ n ( Alg ) = ˆ α n , ∀ n. Finally , we note that P n R ∞ r n ( ˆ β 0 t − ˆ β t ) dt is precisely the size of the area under the ˆ β -curve generated by the algorithm, i.e., ˆ β = ( { ˆ β t } t = r 2 t = r 1 ; { ˆ β 0 t } t = r 3 t = r 2 ; { ˆ β 00 t } t = r 4 t = r 3 ; . . . ) (see Figure 4 ). Thus, if we fit the dual v ariables as in ( 37 ) (and update the tail of the old { ˆ β t } t ≥ r n to that of the new { ˆ β 0 t } t ≥ r n upon the arriv al of a new job n ), then Z ∞ 0 ˆ β dt = X n ˆ α n = Flow Cost ( Alg ) . The above deriv ations can be viewed as a generalization of the special ` k -dual fitting results giv en in [4] (see, e.g., Lemma 5.4). A P P E N D I X I I Proof of Lemma 1 : Let A be an online s -speed c -competitive algorithm for the GFC-S problem. For a fixed ∈ (0 , 1] , let t j be the first time that the algorithm A processes 1 1+ fraction of job j . Then, by follo wing the schedule A , we hav e v j ( t ) ≥ 1+ v j , ∀ t ∈ [ r j , t j ] . Therefore, the contribution of job j to the fractional generalized completion time equals Z ∞ r j v j ( t ) v j g 0 j ( t ) dt ≥ Z t j r j 1 + g 0 j ( t ) dt = 1 + g j ( t j ) , where the inequality holds because g 0 j ( t ) ≥ 0 , and the equality uses g j ( r j ) = 0 . No w , let us assume that the machine runs faster at a speed of (1 + ) , and consider a ne w online algorithm B that schedules job j in the first v j 1+ time slots that j was scheduled by algorithm A . Then the completion time of job j in schedule B is t j , and hence the contrib ution of job j to the integral cost of schedule B equals g j ( t j ) . Since the same ar gument holds for any job j , by summing o ver all jobs, we conclude that the integral completion time of B is at most 1+ times the fractional completion time of A . Since A is s -speed c -competitiv e for the fractional objecti ve cost and the optimal fractional cost is a lo wer bound for the optimal integral cost, the schedule B is (1 + ) s -speed 1+ c -competiti ve for the GICS problem. Proof of Lemma 3 : First we note that updating α , β -plots do not change the dual objectiv e value. T o see this, assume at the current step k we update both plots by δ k . Then the first term P N r =1 ¯ α r in the dual objectiv e function of the splitted instance ( 5 ) reduces by exactly δ k ( t k + ¯ v k ) , which is the size of the area shrinked by lowering the height of all the steps prior to the current time t k + ¯ v k . As we also lo wer the β -plot by the same amount δ k for t ∈ [0 , t k + ¯ v k ] , the second term R ∞ 0 ¯ β t in the dual objecti ve function also decreases by the same amount δ j ( t k + ¯ v k ) . Thus the o verall effect of updates in the dual objecti ve ( 5 ) at each iteration is zero. This implies that the dual objecti ve v alue at the end of Algorithm 1 is the same as its initial value, i.e., OPT . Next we show that Algorithm 1 terminates properly with a feasible dual solution. Otherwise by contradiction, let ˆ j be the first step whose update at time ˆ t := t ˆ j + ¯ v ˆ j violates at least one of the dual constraints, i.e., ¯ β ˆ t + ρ j g ( ˆ t ) < h j for some j . No w let j ` be the first j -step on the right side of ˆ j , and consider the time t j ` at which j ` was set to its reference height h j . Defining ∆ to be the height difference between ˆ j and h j at time t j ` , we hav e ∆ ≥ P k ∈ I ( ρ k − ρ j )( g ( t k + ¯ v k ) − g ( t k )) , where I := [ ˆ t, t j ` ] , and k ∈ I refers to all the subjubs (steps) which are scheduled during I . This is because first of all the updates prior to j ` do not change the r elative height difference between ˆ j and j ` . Moreov er , during the interv al I if a subjob of density ρ k is scheduled over [ t k , t k + ¯ v k ] ⊆ I , then from ( 4 ) the first term in ¯ β t + ρ j g ( t ) drops at a negati ve rate ρ k g 0 ( t ) while the second term increases at a positiv e rate ρ j g 0 ( t ) . As all the intermediate steps k ∈ I hav e higher density than ρ j (otherwise, by HDF rule the subjob j ` should ha ve been processed earlier), we can write, ∆ : = ( ¯ β ˆ t + ρ ˆ j g ( ˆ t )) − h j = ( ¯ β ˆ t + ρ ˆ j g ( ˆ t )) − ( ¯ β t j ` + ρ j g ( t j ` )) ≥ ( ¯ β ˆ t + ρ j g ( ˆ t )) − ( ¯ β t j ` + ρ j g ( t j ` )) = X k ∈ I ( ρ k − ρ j )( g ( t k + ¯ v k ) − g ( t k )) . In other words, ∆ is larger than the total height decrease that ¯ β t + ρ j g ( t ) incurs o ver I . T o deriv e a contradiction, it is suf ficient to show that ∆ is no less than the total height decrements incurred by the step updates during the interval I . T ow ard this aim let us partition I into subintervals I = ∪ p j 0 =1 I j 0 as we move backward over I . Each subinterval I j 0 starts with the first subjob j 0 1 outside of the previous one I j 0 − 1 , and it is just long enough to contain all other j 0 -steps which are inside I . By this partitioning and HDF rule, it is easy to see that the first step j 0 1 of each subinterv al I j 0 must be set as a reference for job j 0 . No w by our choice of ˆ j we know that all the steps in I j 0 can be properly set to their reference height at the time of update. Thus using a similar ar gument as abov e, the total height decrements due to step updates in the subinterval I j 0 (except the first step j 0 1 which is a reference step) is equal to the total height decrease that ¯ β t + ρ j 0 g ( t ) incurs ov er the interv al I j 0 , i.e., ∆ j 0 = P k ∈ I j 0 ( ρ k − ρ j 0 )( g ( t k + ¯ v k ) − g ( t k )) . Finally , we account for total height reduction due to reference updates, denoted by P j 0 ∆ j 0 1 . W e do this using a charging argument where we charge height decrements due to reference updates to the subinterv als I j 0 , j 0 = 1 , . . . , p . As a result, the total height reduction due to reference updates would be the total charge over all the subintervals. For this purpose, let L ( j 0 ) := { r 1 , r 2 , . . . , r q } be the longest chain of subintervals such that r 1 is index of the first subinterval of lo wer density on the left side of I j 0 , i.e., ρ r 1 ≤ ρ j 0 , and inducti vely , r i +1 denotes the index of the first subinterval of lo wer density on the left side of I r i , i.e., ρ r i +1 ≤ ρ r i . Then we char ge subinterval I j 0 by ( ρ j 0 − ρ r q ) g ( I j 0 ) , where g ( I j 0 ) := P k ∈ I j 0 ( g ( t k + ¯ v k ) − g ( t k )) is the total v ariation of g ( · ) ov er I j 0 . Now , as an easy exercise, one can show that the height decrements due to reference updates P j 0 ∆ j 0 1 is bounded abov e by the total charge P j 0 ( ρ j 0 − ρ r q ) g ( I j 0 ) , i.e., P j 0 ∆ j 0 1 ≤ P j 0 ( ρ j 0 − ρ r q ) g ( I j 0 ) . Thus the total height reduction over I can be bounded by X j 0 (∆ j 0 + ∆ j 0 1 ) ≤ X j 0 X k ∈ I j 0 ( ρ k − ρ j 0 )( g ( t k + ¯ v k ) − g ( t k )) + X j 0 ( ρ j 0 − ρ r q ) g ( I j 0 ) = X j 0 X k ∈ I j 0 ( ρ k − ρ j 0 )( g ( t k + ¯ v k ) − g ( t k )) + X j 0 X k ∈ I j 0 ( ρ j 0 − ρ r q )( g ( t k + ¯ v k ) − g ( t k )) = X j 0 X k ∈ I j 0 ( ρ k − ρ r q )( g ( t k + ¯ v k ) − g ( t k )) ≤ X k ∈ I ( ρ k − ρ j )( g ( t k + ¯ v k ) − g ( t k )) ≤ ∆ , where the second inequality holds because ρ j ≤ min k ∈ I ρ k ≤ ρ r q . This contradiction establishes the dual feasibility of the generated solution at the end of Algorithm 1 . Finally , let ( { ¯ α j ` } , β t ) denote the v alues of α, β -plots at the end of Algorithm 1 . Since at the end of the algorithm all the j -steps are properly set to the same reference height ¯ α j ` ¯ v j ` = h j , ∀ ` , we hav e h j = P ` ¯ α j ` P ` ¯ v j ` = P ` ¯ α j ` v j . This shows that α j := P ` ¯ α j ` = h j v j and β t form feasible dual solutions to the original instance. Definition 6: W e say a function g 1 dominates another function g 2 and write g 1 g 2 if g 0 1 ( t ) > g 0 2 ( t ) ∀ t . A class of functions H = { g j } is a dominating family if ( H , ) forms a totally ordered set. Pr oposition 5: Let H = { g j ( t ) } be a dominating family of cost functions. Then the optimal schedule for GFCS ( r n ) must process the jobs according to their dominance order , i.e., it first schedules the job with the most dominant cost function, and at the end it schedules the least dominant job . Pr oof: Let us sort the functions in H as g 1 g 2 . . . g n . Note that e very curve p j ( t 1 ) − g j ( t ) is simply a − g j ( t ) that has been shifted by a constant amount p j ( t 1 ) . No w we argue that e very two curves p j ( t 1 ) − g j ( t ) and p k ( t 1 ) − g k ( t ) must intersect exactly once over the interval [0 , t 1 ] . The reason is that if p j ( t 1 ) − g j ( t ) and p k ( t 1 ) − g k ( t ) do not intersect, then one of them must lie abov e the other o ver the entire horizon [0 , t 1 ] . As a result, the job associated with the lower curve will nev er be executed by the optimal policy x o , which is a contradiction. On the other hand, if two curves intersect in at least two time instances, say t a 6 = t b , then p j ( t 1 ) − g j ( t a ) = p k ( t 1 ) − g k ( t a ) and p j ( t 1 ) − g j ( t b ) = p k ( t 1 ) − g k ( t b ) imply that g j ( t b ) − g j ( t a ) = g k ( t b ) − g k ( t a ) . Ho wev er , that contradicts the strict dominance of g j ov er g k or vice versa. (Note that g j ( t b ) − g j ( t a ) = R t b t a g 0 j ( t ) dt .) Therefore, each curve p k ( t 1 ) − g k ( t ) can participate in determining the upper en velope of the collection of curves { p k ( t 1 ) − g k ( t ) , k = 1 , . . . , n } only if, ov er the interval [0 , v 1 ] , the curve p 1 ( t 1 ) − g 1 ( t ) determines the upper en velope; ov er [ v 1 , v 1 + v 2 ] , the curve p 2 ( t 1 ) − g 2 ( t ) determines the upper en velope; and ev entually at the last time interval [ t 1 − v n , t 1 ] , the curv e p n ( t 1 ) − g n ( t ) determines the upper env elope. Thus the optimal polic y schedules the jobs according to their dominance order . Example 5: The set of functions H = { ρ j g ( t ) : ρ 1 > ρ 2 > . . . > ρ n } with nonnegati ve nondecreasing function g ( t ) forms a dominating family of cost functions. Therefore, from Proposition 5 , the HDF rule is an optimal offline schedule for GFCS ( r n ) . R E F E R E N C E S [1] J. Y . Leung, Handbook of Scheduling: Algorithms, Models, and Performance Analysis . CRC Press, 2004. [2] R. L. Graham, E. L. Lawler , J. K. Lenstra, and A. R. Kan, “Optimization and approximation in deterministic sequencing and scheduling: A surv ey , ” in Annals of Discr ete Mathematics . Elsevier , 1979, vol. 5, pp. 287–326. [3] S. Angelopoulos, G. Lucarelli, and T . N. Kim, “Primal–dual and dual-fitting analysis of online scheduling algorithms for generalized flow-time problems, ” Algorithmica , v ol. 81, no. 9, pp. 3391–3421, 2019. [4] S. Anand, N. Garg, and A. Kumar , “Resource augmentation for weighted flow-time explained by dual fitting, ” in Pr oceedings of the T wenty-Third Annual ACM-SIAM Symposium on Discrete Algorithms . SIAM, 2012, pp. 1228–1241. [5] S. Im and B. Moseley , “ An online scalable algorithm for minimizing ` k -norms of weighted flow time on unrelated machines, ” in Pr oceedings of the T wenty-Second Annual A CM-SIAM Symposium on Discr ete Algorithms . SIAM, 2011, pp. 95–108. [6] N. Bansal and H.-L. Chan, “W eighted flow time does not admit o (1) -competitive algorithms, ” in Pr oceedings of the T wentieth Annual A CM-SIAM Symposium on Discr ete Algorithms . SIAM, 2009, pp. 1238–1244. [7] S. Leonardi and D. Raz, “ Approximating total flow time on parallel machines, ” J ournal of Computer and System Sciences , v ol. 73, no. 6, pp. 875–891, 2007. [8] G. Lucarelli, N. K. Thang, A. Srivasta v , and D. Trystram, “Online non-preemptive scheduling in a resource augmentation model based on duality , ” in Eur opean Symposium on Algorithms (ESA 2016) , v ol. 57, no. 63, 2016, pp. 1–17. [9] S. Im, J. Kulkarni, K. Munagala, and K. Pruhs, “Selfishmigrate: A scalable algorithm for non-clairvoyantly scheduling heterogeneous processors, ” in Pr oc. 55th Annual Symposium on F oundations of Computer Science . IEEE, 2014, pp. 531–540. [10] S. Im, J. Kulkarni, and K. Munagala, “Competitiv e algorithms from competitive equilibria: Non-clairvoyant scheduling under polyhedral constraints, ” Journal of the ACM (JA CM) , vol. 65, no. 1, pp. 1–33, 2018. [11] N. Garg and A. Kumar , “Minimizing average flow-time: Upper and lower bounds, ” in 48th Annual IEEE Symposium on F oundations of Computer Science (FOCS’07) . IEEE, 2007, pp. 603–613. [12] B. Kalyanasundaram and K. Pruhs, “Speed is as powerful as clairvo yance, ” Journal of the ACM (JA CM) , vol. 47, no. 4, pp. 617–643, 2000. [13] J. S. Chadha, N. Garg, A. Kumar , and V . Muralidhara, “ A competiti ve algorithm for minimizing weighted flow time on unrelated machines with speed augmentation, ” in Pr oceedings of the F orty-F irst Annual A CM Symposium on Theory of Computing . A CM, 2009, pp. 679–684. [14] N. R. Devanur and Z. Huang, “Primal dual gives almost optimal energy-ef ficient online algorithms, ” ACM T ransactions on Algorithms (T ALG) , vol. 14, no. 1, pp. 1–30, 2018. [15] S. Im, J. Kulkarni, and K. Munagala, “Competitive flow time algorithms for polyhedral scheduling, ” in Proc. 56th Annual Symposium on F oundations of Computer Science . IEEE, 2015, pp. 506–524. [16] S. Im, B. Moseley , and K. Pruhs, “ A tutorial on amortized local competitiveness in online scheduling, ” SIGACT News , vol. 42, no. 2, pp. 83–97, 2011. [17] C. Chekuri, S. Khanna, and A. Zhu, “ Algorithms for minimizing weighted flo w time, ” in Pr oceedings of the Thirty-Thir d Annual A CM Symposium on Theory of Computing . A CM, 2001, pp. 84–93. [18] K. T . Nguyen, “Lagrangian duality in online scheduling with resource augmentation and speed scaling, ” in Pr oc. Eur opean Symposium on Algorithms . Springer , 2013, pp. 755–766. [19] S. Im, B. Moseley , and K. Pruhs, “Online scheduling with general cost functions, ” SIAM Journal on Computing , vol. 43, no. 1, pp. 126–143, 2014. [20] S. Im and J. Kulkarni, “Fair online scheduling for selfish jobs on heterogeneous machines, ” in Pr oceedings of the 28th ACM Symposium on P arallelism in Algorithms and Ar chitectur es . A CM, 2016, pp. 185–194. [21] D. P . W illiamson and D. B. Shmoys, The Design of Appr oximation Algorithms . Cambridge Uni versity Press, 2011. [22] Y . Azar and A. Epstein, “Con vex programming for scheduling unrelated parallel machines, ” in Pr oceedings of the Thirty-Seventh Annual A CM Symposium on Theory of Computing . A CM, 2005, pp. 331–337. [23] N. Mego w and J. V erschae, “Dual techniques for scheduling on a machine with varying speed, ” SIAM Journal on Discr ete Mathematics , vol. 32, no. 3, pp. 1541–1571, 2018. [24] W . H ¨ ohn and T . Jacobs, “On the performance of Smith’ s rule in single-machine scheduling with nonlinear cost, ” ACM T ransactions on Algorithms (T ALG) , vol. 11, no. 4, pp. 1–30, 2015. [25] N. Bansal and K. Pruhs, “The geometry of scheduling, ” SIAM Journal on Computing , vol. 43, no. 5, pp. 1684–1698, 2014. [26] B. Moseley , “Scheduling to approximate minimization objectives on identical machines, ” in Pr oceedings of the 46th International Colloquium on A utomata, Languages, and Pr ogramming, ICALP , 2019, pp. 86:1–86:14. [27] K. Fox, S. Im, J. Kulkarni, and B. Mosele y , “Online non-clairvo yant scheduling to simultaneously minimize all con vex functions, ” in Appr oximation, Randomization, and Combinatorial Optimization. Algorithms and T echniques . Springer , 2013, pp. 142–157. [28] L. Becchetti, S. Leonardi, A. Marchetti-Spaccamela, and K. Pruhs, “Online weighted flow time and deadline scheduling, ” Journal of Discr ete Algorithms , vol. 4, no. 3, pp. 339–352, 2006. [29] T . Bas ¸ ar , S. Meyn, and W . R. Perkins, “Lecture notes on control system theory and design, ” arXiv pr eprint arXiv:2007.01367 , 2020. [30] D. Liberzon, Calculus of Variations and Optimal Contr ol Theory: A Concise Intr oduction . Princeton University Press, 2011. [31] M. Cheung, J. Mestre, D. B. Shmoys, and J. V erschae, “ A primal-dual approximation algorithm for min-sum single-machine scheduling problems, ” SIAM Journal on Discrete Mathematics , vol. 31, no. 2, pp. 825–838, 2017. [32] A. Antoniadis, R. Hoeksma, J. Meißner , J. V erschae, and A. Wiese, “ A QPT AS for the general scheduling problem with identical release dates, ” in 44th International Colloquium on Automata, Languages, and Pr ogramming (ICALP 2017) . Schloss Dagstuhl- Leibniz-Zentrum Fuer Informatik, 2017, p. 31:1–31:14. [33] V . Gupta, B. Moseley , M. Uetz, and Q. Xie, “Greed works - Online algorithms for unrelated machine stochastic scheduling, ” Mathematics of Oper ations Researc h , vol. 45, no. 2, pp. 497–516, 2020.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment