Direct data-driven LPV control of nonlinear systems: An experimental result
We demonstrate that direct data-driven control of nonlinear systems can be successfully accomplished via a behavioral approach that builds on a Linear Parameter-Varying (LPV) system concept. An LPV data-driven representation is used as a surrogate LP…
Authors: Chris Verhoek, Hossam S. Abbas, Rol
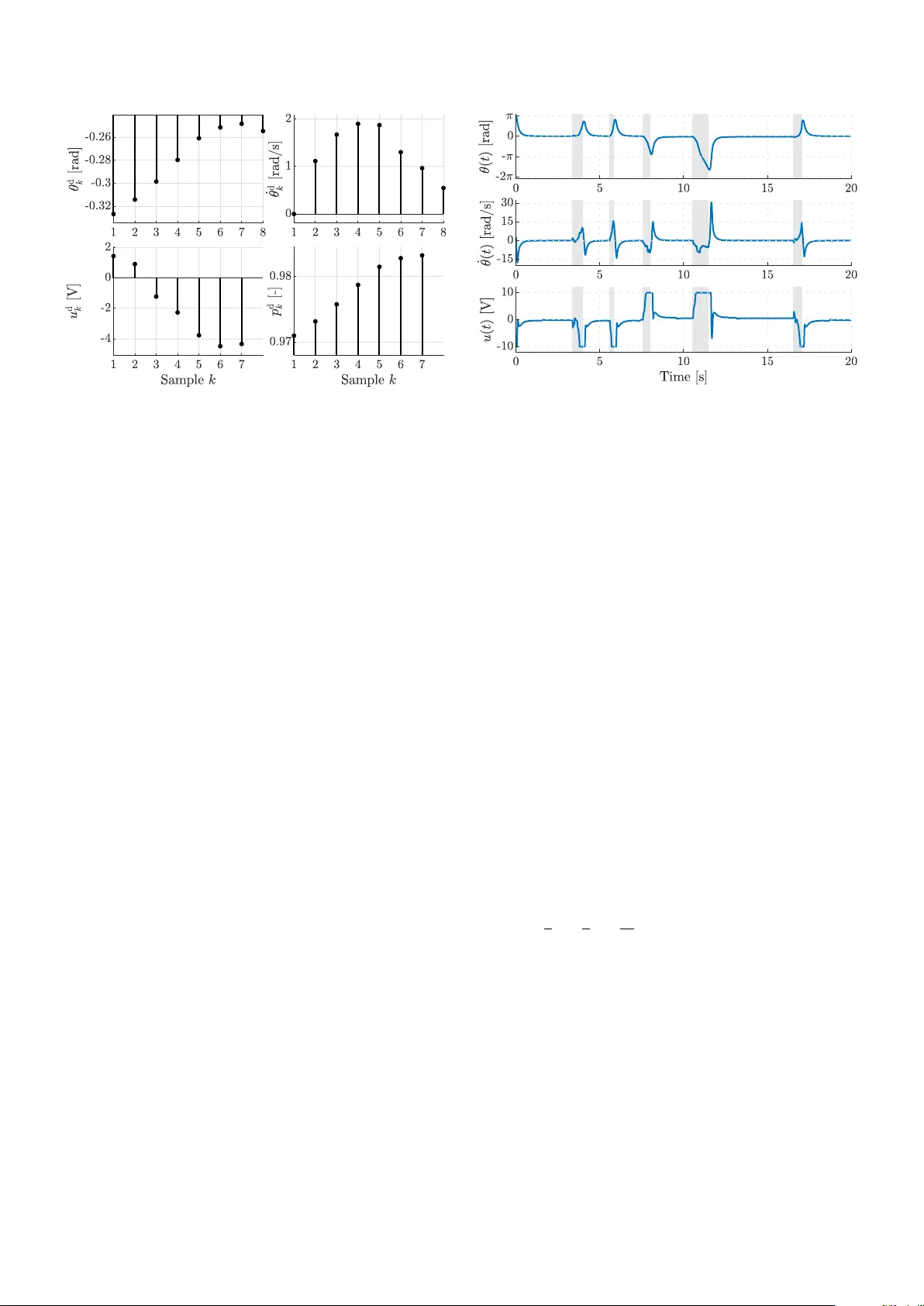
Direct data-driv en LPV con trol of nonlinear systems: An exp erimen tal result ⋆ Chris V erho ek ∗ Hossam S. Abbas ∗∗ Roland T´ oth ∗ , ∗∗∗ ∗ Contr ol Systems Gr oup, Dept. of Ele ctric al Engine ering, Eindhoven University of T e chnolo gy, 5600MB Eindhoven, The Netherlands ∗∗ Institute for Ele ctric al Engine ering in Me dicine, Universit¨ at zu L¨ ub e ck, 23558 L¨ ub e ck, Germany ∗∗∗ Systems and Contr ol L ab, Institute for Computer Scienc e and Contr ol, 1111 Budap est, Hungary Abstract: W e demonstrate that direct data-driv en control of nonlinear systems can b e successfully accomplished via a b ehavioral approac h that builds on a Line ar Par ameter-V arying (LPV) system concept. An LPV data-driven representation is used as a surrogate LPV form of the data-driv en representation of the original nonlinear system. The LPV data-driven control design that builds on this representation form uses only measuremen t data from the nonlinear system and a priori information on a scheduling map that can lead to an LPV em b edding of the nonlinear system behavior. Efficiency of the proposed approac h is demonstrated exp erimen tally on a nonlinear un balanced disc system sho wing for the first time in the literature that b eha vioral data-driv en metho ds are capable to stabilize arbitrary forced equilibria of a real-w orld nonlinear system by the use of only 7 data p oin ts. Keywor ds: Data-Driv en Control; Linear Parameter-V arying Systems. 1. INTR ODUCTION Data-driv en analysis and con trol metho ds for Line ar Time-Invariant (L TI) systems that are based on Willems’ F undamental L emma (Willems et al., 2005) hav e b ecome increasingly p opular in recen t years, as these metho ds can giv e guaran tees in terms of stability and performance of the closed-lo op operation, even if the con troller is synthe- sized from data without an y information on the underlying L TI system. Results for L TI systems include, but are not limited to, e.g., data-driv en simulation (Mark ovsky and Rapisarda, 2008), dissipativit y analysis (Romer et al., 2019), and (predictive) con trol (De Persis and T esi, 2019; Coulson et al., 2019), and many of these metho ds ha ve seen extensions of their guarantees under the presence of noise. Some extensions of these data-driv en metho ds hav e b een made tow ards the nonlinear system domain, e.g., (Alsalti et al., 2021). Ho wev er, these results often impose heavy restrictions on the systems in terms of mo del transfor- mations or linearizations. A promising direction tow ards data-driv en analysis and control of nonlinear systems with guaran tees, is the extension of the F undamental Lemma for Line ar Par ameter-V arying (LPV) systems in V erho ek et al. (2021b). F rom this result, extensions on dissipativity analysis (V erho ek et al., 2023), predictiv e control (V erho ek et al., 2021a) and state-feedbac k control (V erhoek et al., 2022) hav e b een dev elop ed. ⋆ This work has received funding from the Europ ean Research Council (ER C) under the Europ ean Union’s Horizon 2020 researc h and innov ation programme (grant agreement nr. 714663), the Eu- ropean Space Agency in the scope of the ‘AI4GNC’ pro ject with SENER Aero espacial S.A. (con tract nr. 4000133595/20/NL/CRS), and the Deutsche F orsch ungsgemeinschaft (DFG, German Research F oundation)-Pro ject No. 419290163. Corresp onding author: Chris V erho ek ( c.verhoek@tue.nl ) The class of LPV systems consists of systems with a linear input-(state)-output relationship, while this relationship itself is v arying along a me asur able time-v arying signal – the sche duling variable . The scheduling v ariable is used to express nonlinearities, time v ariation, or exogenous effects. This makes the LPV framew ork highly suitable for nonlinear system analysis and control, by means of using LPV mo dels as surr o gate r epr esentations of nonlinear systems. The LPV framew ork has sho wn to be able to capture a relatively large subset of nonlinear systems, b y emb e dding the nonlinear system dynamics in an LPV description (T´ oth, 2010). Therefore, we sho w in this w ork that the data-driven metho ds for LPV systems are in fact applicable for nonlinear systems, based on the concept of LPV embedding of the underlying nonlinear system. In the literature, so far data-based control metho ds of the b eha vioral kind ha ve b een successfully applied in practice on systems that b eha ve fairly linear (Marko vsky and D¨ orfler, 2021). How ev er, successful application of the aforemen tioned data-driven metho ds on systems with sig- nifican t nonlinear behavior has not been accomplished yet, b esides in a form of online adaption of an L TI sc heme. Therefore, as our primary con tribution, we demonstrate in this pap er that direct data-driven LPV state-feedback con- trol can ac hiev e tracking of an arbitrary forced equilibria of a real-w orld nonlinear system. More sp ecifically , w e apply the methods in V erhoek et al. (2022) on experimentally obtained measurement data from a nonlinear un balanced disc system and show that the obtained LPV controller can successfully achiev e any angular setp oin ts and reject disturbances, such as man ual tapping of the disk. In the remainder, we briefly discuss direct data-driven state-feedbac k controller synthesis for LPV systems in Section 2, follo wed by a description of the exp erimen tal results on the unbalanced disc setup in Section 3. The conclusions on the obtained results and rec ommendations for future research are giv en in Section 4. 2. D A T A-DRIVEN LPV ST A TE-FEEDBA CK CONTR OLLER SYNTHESIS 2.1 F r om nonline ar systems to LPV r epr esentations Analysis and con trol of nonlinear systems using con v ex ap- proac hes can b e accomplished by emb e dding the nonlinear system in to an LPV represen tation. Consider a Discr ete- Time (DT) nonlinear system in state-sp ac e (SS) form q x k = f ( x k , u k ) , (1a) y k = h ( x k , u k ) , (1b) with state v ariable x k ∈ R n x , input v ariable u k ∈ R n u , output v ariable y k ∈ R n y , k ∈ Z indicating the discrete time-steps with q representing the forw ard shift-op erator, i.e., q x k = x k +1 , and con tinuously differentiable functions f , h . There exist v arious metho ds to em b ed (1) into an LPV-SS representation of the form q x k = A ( p k ) x k + B ( p k ) u k , (2a) y k = C ( p k ) x k + D ( p k ) u k , (2b) where the scheduling v ariable p k ∈ P ⊆ R n p is constructed using a so-called sche duling map ψ , such that p k = ψ ( x k , u k ) . (2c) By assuming that the scheduling p is (i) me asur able , i.e., it can b e calculated from measurable signals via ψ , and (ii) allow ed to v ar y independently of the other signals, such as ( x k , u k ) inside a compact, conv ex set P that defines the range of p , then w e can call (2) an em b edding of (1). This means that the solution set of (1) is embedded in the solution set of (2). While linearity is gained b y taking these assumptions on p , the price to b e paid is conserv atism of the resulting represen tation, as the solution set of (2) will inevitably con tain more solution tra jectories than the solution set of (1), due to the assumed indep endence of p . The LPV embedding pro cedure is schematically depicted in Fig. 1. With this em b edding strategy , numerous successful applications of LPV con trol for nonlinear systems hav e b een presented in literature (T´ oth, 2010; Mohammadp our and Sc herer, 2012). In the sequel, we consider that the scheduling map ψ and the set P are known, and with the c hoice of ψ , (1) can b e embedded in the form of (2) with the matrix functions A : P → R n x × n x and B : P → R n x × n u and C = I , D = 0, suc h that A and B hav e affine dep endence on p : A ( p k ) = A 0 + n p X i =1 p [ i ] k A i , B ( p k ) = B 0 + n p X i =1 p [ i ] k B i , (3) where the coefficients { A i } n p i =1 and { B i } n p i =1 are real matri- ces with appropriate dimensions and p [ i ] k denotes the i th elemen t of the vector p k . Supp ose we obtain the data set D N d = { u d k , p d k , x d k } N d +1 k =1 from (2). Based on the results of V erho ek et al. (2022), we now show that we can construct a fully data-driven representation of (2),(3) using a D N d that satisfies a p ersistenc e of excitation condition. NL w LPV w p NL w p Fig. 1. LPV em b edding of a nonlinear system, where w represen ts the collection of input and output signals. 2.2 Data-driven r epr esentations Considering (2a), (3), we can separate the coefficients A i , B i from the signals as q x k = [ A 0 ··· A n p ] | {z } A x k p k ⊗ x k + [ B 0 ··· B n p ] | {z } B u k p k ⊗ u k . (4) With D N d , we construct the following matrices that are asso ciated with (4): U = u d 1 · · · u d N d , U p = p d 1 ⊗ u d 1 · · · p d N d ⊗ u d N d , (5a) X = x d 1 · · · x d N d , X p = p d 1 ⊗ x d 1 · · · p d N d ⊗ x d N d , (5b) where U ∈ R n u × N d , U p ∈ R n p n u × N d , X ∈ R n x × N d and X p ∈ R n p n x × N d , resp ectiv ely . Moreo ver, define − → X as − → X = x d 2 · · · x d N d +1 ∈ R n x × N d . (5c) As (2) is linear along p , we ha ve − → X = A X X p + B U U p . (6) Based on this relationship, the LPV system represented b y (2a), (3) can b e fully characterized in terms of the data matrices in (5) as follows q x k = − → X X X p U U p | {z } G † x k p k ⊗ x k u k p k ⊗ u k . (7) The data-based represen tation (7) is wel l-p ose d under the condition that the data set D N d is p ersistently exciting (PE). The PE condition for D N d , given the represen tation (2),(3), is defined in V erho ek et al. (2022) as follows: Condition 1. If G has full r ow rank, i.e., rank {G } = (1 + n p )( n x + n u ), then D N d is p ersisten tly exciting w.r.t. (2), (3) and (7) is well-defined. R emark 2. T o satisfy Condition 1, we hav e that N d ≥ (1 + n p )( n x + n u ) and, as n x , n p , n u , are kno wn it is p ossible to explicitly verify the condition. Close d-lo op data-driven r epr esentations: Connecting the LPV system with the feedbac k law u k = K ( p k ) x k , where K ( p k ) has affine dep endence on p k , i.e., u k = K 0 + P n p i =1 p [ i ] k K i x k = [ K 0 ··· K n p ] x k p k ⊗ x k , (8) yields the closed-lo op system, q x = M " x k p k ⊗ x k p k ⊗ p k ⊗ x k # , (9) where M = [ A 0 + B 0 K 0 ¯ A + B 0 ¯ K + ¯ B ( I n p ⊗ K 0 ) ¯ B ( I n p ⊗ ¯ K ) ], with ¯ A = [ A 1 ... A n p ], similarly for ¯ B , ¯ K . With (9), we can no w in tro duce the following result that provides data-based parametrization of the closed-lo op. The or em 3. Giv en a D N d generated b y (2) that satisfies Condition 1. Let − → X and G b e constructed as in (5c) and (7) based on D N d . Then, the closed-lo op system (9) is represen ted equiv alently as q x k = − → X V " x k p k ⊗ x k p k ⊗ p k ⊗ x k # , (10) where V ∈ R N d × n x (1+ n p + n 2 p ) is any matrix that satisfies I n x 0 0 0 I n p ⊗ I n x 0 K 0 ¯ K 0 0 I n p ⊗ K 0 I n p ⊗ ¯ K | {z } M CL = X X p U U p | {z } G V , (11) whic h we will refer to as the c onsistency c ondition . □ Pro of. See V erhoek et al. (2022). This result allo ws to provide direct synthesis metho ds for the design of data-driven LPV state-feedback controllers that stabilize (2), and hence inheren tly stabilize the un- derlying nonlinear system with guaranteed p erformance. 2.3 Data-driven c ontr ol ler synthesis With the data-driv en representation of the closed-loop LPV system in Theorem. 3, LPV state-feedback con troller syn thesis algorithms can b e formulated, which generate con trollers using only the information in D N d , while guar- ante eing stability and p erformance of the closed-loop. W e consider tw o con troller synthesis algorithms, dev elop ed in V erho ek et al. (2022), that yield guarantees in terms of quadratic stability and performance, e.g., L 2 -gain. Before w e can discuss the synthesis metho ds, we need to in tro duce a few v ariables that are necessary to formulate the results. F or a Z = Z ⊤ ∈ R n x × n x define Z 0 = blkdiag Z, 0 n x n p × n x n p , (12a) and for − → X in (5) define − → X = blkdiag − → X , I n p ⊗ − → X . (12b) F urthermore, for a V satisfying (11), define the matrices F Q , F as V I n x p k ⊗ I n x p k ⊗ p k ⊗ I n x Z = = h I N d p k ⊗ I N d i ⊤ F Q h I n x p k ⊗ I n x i = F I n x p k ⊗ I n x p k ⊗ p k ⊗ I n x . (12c) With these v ariables, we can form ulate the synt hesis metho d that provides an LPV state-feedback con troller that guaran tees stabilit y and quadratic p erformance of the closed-lo op system defined by Q ⪰ 0 , R ≻ 0, in terms of the following theorem. The or em 4. Giv en a D N d from (2) that satisfies Con- dition 1. There exists an LPV state-feedback controller K ( p ) in the form of (8) that stabilizes (2) and for a given Q ⪰ 0 , R ≻ 0 minimizes the suprem um of J ( x, u ) = P ∞ k =1 x ⊤ k Qx k + u ⊤ k Ru k , along all solutions of (9), if there exist Z = Z ⊤ , Ξ, F Q as in (12c), and Y , such that ∗ ∗ ⊤ Ξ 0 0 W ⊤ L 11 L 12 I 0 L 21 L 22 ≺ 0 , (13a) ∗ ∗ ⊤ Ξ 11 Ξ 12 Ξ ⊤ 12 Ξ 22 | {z } Ξ I ∆ p ⪯ 0 , Ξ 22 ≻ 0 , (13b) Z 0 0 0 I n p ⊗ Z 0 Y 0 ¯ Y 0 0 I n p ⊗ Y 0 I n p ⊗ ¯ Y = G F , (13c) for all p ∈ P , where Y = [ Y 0 ¯ Y ] , (14a) ∆ p = blkdiag p [1] I 2 n x , . . . , p [ n p ] I 2 n x , (14b) L 11 = 0 2 n x n p × 2 n x n p , (14c) L 12 = 1 n p ⊗ I 2 n x 0 2 n x n p × ( n x + n u ) , (14d) L 21 = 0 n x × 2 n x n p I n p ⊗ Γ 1 0 n x × 2 n x n p I n p ⊗ Γ 2 0 ( n x + n u ) × 2 n x n p , Γ 1 = [ I n x 0 ] , Γ 2 = [ 0 I n x ] , (14e) L 22 = Γ 1 0 1 n p ⊗ 0 n x × 2 n x 0 Γ 2 0 1 n p ⊗ 0 n x × 2 n x 0 0 I ( n x + n u ) , (14f ) W = Z 0 F ⊤ Q − → X ⊤ Z Q 1 2 0 Y ⊤ R 1 2 − → X F Q Z 0 0 0 Q 1 2 Z 0 0 I n x 0 R 1 2 Y 0 0 I n u , (14g) with 1 n = [ 1 ··· 1 ] ⊤ ∈ R n , and Z 0 , − → X , F as in (12). Then, the state-feedback con troller K ( p ) is constructed as K 0 = Y 0 Z − 1 , ¯ K = ¯ Y ( I n p ⊗ Z ) − 1 , (15) where Z is minimizing sup p ∈ P trace( Z ) among all p ossible c hoices of Z that satisfy (13). □ Pro of. See V erhoek et al. (2022). Similarly , we can formulate a data-driven syn thesis metho d that yields an LPV state-feedback con troller that guaran- tees a b ound on the L 2 -gain, shap ed b y matrices W S , W R (see V erho ek et al. (2022)), of the closed-lo op system. The or em 5. Given W S , W R and a D N d generated b y (2) that satisfies Condition 1. There exists an LPV state- feedbac k controller K ( p ) in the form of (8) that stabilizes (2) and guaran tees that the L 2 -gain of the closed-lo op system is less than γ > 0, if there exists a Z = Z ⊤ ≻ 0, a multiplier Ξ, F Q as in (12c), and Y that satisfy the conditions in (13) with L 11 = 0 2 n x n p × 2 n x n p , (16a) L 12 = 1 n p ⊗ I 2 n x 0 2 n x n p × (2 n x + n u ) , (16b) L 21 = 0 n x × 2 n x n p I n p ⊗ Γ 1 0 n x × 2 n x n p I n p ⊗ Γ 2 0 (2 n x + n u ) × 2 n x n p , (16c) L 22 = Γ 1 0 1 n p ⊗ 0 n x × 2 n x 0 Γ 2 0 1 n p ⊗ 0 n x × 2 n x 0 0 I (2 n x + n u ) , (16d) W = Z 0 ( ∗ ) ⊤ ( ∗ ) ⊤ ( ∗ ) ⊤ 0 − → X F Q Z 0 0 0 ( ∗ ) ⊤ h W 1 2 S Z 0 i 0 γ I n x 0 0 W 1 2 R Y 0 0 γ I n u 0 0 [ I n x 0 ] 0 0 γ I n x , (16e) and with Y , ∆ p , Γ 1 , Γ 2 as in (14), and Z 0 , − → X , F as in (12). Then, a realization of K ( p ) is obtained as in (15). □ Pro of. See V erhoek et al. (2022). W e can add the minimization of γ as an ob jectiv e while solving (13) in Theorem 5 to tigh ten the upp er bound γ on the L 2 -gain. In Section 3, w e will compare and apply these metho ds to synthesize an LPV state-feedback con troller for a nonline ar system. 2.4 Discussion W e w ant to again highligh t that both these syn thesis pro- grams are only dependent on (i) the data set D N d that is measured from the system, and (ii) the assumed kno wledge of the sc heduling map ψ . F urthermore, when the input u is sufficiently exciting, one needs only (1 + n p )( n x + n u ) data p oin ts to b e able to synthesize an LPV state-feedbac k con troller for a nonlinear system. It is also imp ortan t to note that –contrary to well-established results in mo del- based LPV state-feedback syn thesis (Rugh and Shamma, 2000; Rotondo et al., 2014)– our synthesis metho ds allo w to ha ve a sc heduling dep enden t B matrix in the LPV represen tation (2) of the true underlying system, although suc h a represen tation/mo del is never computed in our metho dology . Finally , the data that is used in the synthesis metho ds of Theorems 4 and 5 is assumed to b e noise-free, just as in the initial results for L TI systems (Mark ovsky and Rapisarda, 2008). Extending our results to handle noise-infected data is an important future researc h direc- tion. The role of regularization, as discussed in the recent pap er Bresc hi et al. (2022), is exp ected to b e a promising approac h to further generalize this method for noisy data. 3. EXPERIMENT AL SETUP W e will now apply the discussed data-driven LPV state- feedbac k synthesis methods to design a con troller for an experimental nonlinear un balanced disc setup and implemen t the designed controller on it. 3.1 Setup description The exp erimen tal setup that we consider is an un balanced disc system, depicted in Fig. 2. The unbalanced disc setup consists of a DC motor connected to a disc with an off- cen tered mass, and hence it mimics the b eha vior of a rotational p endulum. The angular p osition of the disc is measured using an incremental enco der. The contin uous- time nonlinear dynamics of the un balanced disc system are represen ted b y the follo wing ordinary differential equation, ¨ θ ( t ) = − mg l J sin( θ ( t )) − 1 τ ˙ θ ( t ) + K m τ u ( t ) , (17) Fig. 2. The unbalanced disc exp erimen tal setup. where θ is the angular p osition of the disc, u is the input v oltage to the system, whic h is its control input, and m, g , l, J, τ , K m are the ph ysical parameters of the system. In this setup, u is applied with a zero-order-hold actuation and is saturated at ± 10 [V]. In Kulcs´ ar et al. (2009); Ko elewijn and T´ oth (2019), the ph ysical parameters for this setup are estimated using LPV identification metho ds, and mo del-based LPV controllers hav e b een successfully applied to it using the estimated parameters (Abbas et al., 2021). W e actuate and measure the system with synchro- nized sampling at a sampling time of T s = 0 . 01 seconds. Em b edding (17) into an LPV representation can be estab- lished b y defining the scheduling as p ( t ) = sinc( θ ( t )) = sin( θ ( t )) θ ( t ) , where ψ ( θ ) = sinc( θ ( t )) is the sc heduling map. Hence, P is considered as the r ange of the sinc function, i.e., P = [ − 0 . 22 , 1]. By choosing x = [ θ ˙ θ ] ⊤ , we can write (17) as a contin uous-time LPV-SS represen tation: ˙ x ( t ) = 0 1 − mg l J p ( t ) − 1 τ x ( t ) + 0 K m τ u ( t ) , (18a) y ( t ) = x ( t ) . (18b) It is clear that (18) is affinely dep endent on p ( t ). Moreov er, p can b e obtained thr ough the aforementioned scheduling map b y measuring θ with the encoder. Therefore, we can use our data-driv en synthesis metho ds, discussed in Section 2, for the design of a DT con troller for this system without knowing at all the DT equiv alen t of (17) under the considered T s , the parameter v alues, or (18). W e only assume that ψ , i.e., the calculated sequence of p k , is a v ailable. 3.2 Data gener ation The system is controlled using a real-time Ma tlab en vi- ronmen t on a MacBook Pro (2020), whic h comm unicates with the setup through an USB p ort. More details on the Ma tlab environmen t can b e found in Kulcs´ ar et al. (2009). The Ma tlab environmen t ensures synchronous actuation and measurement of the setup. W e obtain the output of the incremental enco der ( θ k ) and an estimate of the angular sp eed ˙ θ k as measurements. W e obtain our data-dictionary D N d b y exciting the system with a randomly generated input in the range [ − 10 , 10], filtered through a low-pass filter to restrict the frequency range of the excitation to the normal operation range of the setup. Condition 1 provides that N d ≥ 6, i.e., T exp ≥ 60 [ms]. T o account for noise induced b y the en- co der and the estimation error of ˙ θ k , w e gathered 1 second w orth of data from which w e selected our data-dictionary that is used in the synthesis algorithms. 3.3 Contr ol ler synthesis F or this exp erimen tal demonstration, we considered the design of tw o controllers: Fig. 3. Data-dictionary used for controller synthesis with N d = 7. Con troller 1: LPV state-feedbac k controller guaran teeing stabilit y and optimal quadratic performance (Th. 4). Con troller 2: LPV state-feedbac k controller guaran teeing stabilit y and a minimal L 2 -gain of the closed-lo op system given W S , W R according to Th. 5. F rom the obtained measurement data, we randomly select a window of N d = 7 samples, which satisfies Condition 1 to create our data-dictionary D N d . Our data-dictionary is depicted in Fig. 3. As D N d satisfies Condition 1, we will use it to represent the behavior of the nonlinear un balanced disc system. Note that the scheduling signal p k is calculated by propagating the measurement of θ k through the sc heduling map. F rom the data-dictionary , w e construct the matrices X, U, X p , U p , − → X according to (5), and the data-driv en represen tation G , whic h are used in the synthesis procedures of Theorems 4 and 5. W e are now ready to synthesize Controller 1 and Con- troller 2. In order to improv e numerical conditioning, w e re-scale and re-cen ter the sc heduling in the syn thesis problems such that ˜ P = [ − 1 , 1]. Solving the synthesis problem for Controller 1 with Q = diag (4 , 0 . 1), R = 3 . 5 in Ma tlab , using Y ALMIP with solv er MOSEK, yields K QP , 0 = [ − 8 . 7239 − 1 . 0733 ] K QP , 1 = [ − 0 . 4894 0 . 0021 ] . F or numerical conditioning, we add a regularization in the cost function for the synthesis of Controller 2 in terms of min γ + λ trace( Z ). Synthesizing Con troller 2 with W S = diag(1 . 5 · 10 − 2 , 2 · 10 − 5 ), W R = 3 . 06 · 10 − 3 and λ = 10 − 6 yields γ = 3 . 3 with K L 2 , 0 = [ − 15 . 1412 − 1 . 8074 ] K L 2 , 1 = [ 8 . 9793 1 . 0102 ] . Just like in model-based design, we ha ve c hosen the v alues for Q, R, W S and W R b y iterative tuning. W e w ant to emphasize that w e ha ve b een able to syn thesize these LPV state-feedbac k controllers using only the 7 data p oin ts sho wn in Fig. 3. W e will now implement these controllers on the exp erimen tal setup. Fig. 4. Exp erimen tal results with Con troller 1 in a dis- turbance rejection scenario. The gray areas indicate when we disturbed the exp erimen tal setup by hand. 3.4 Exp eriments F or the exp erimental v erification of our synthesized con- trollers, we consider tw o scenarios; a disturbance rejection scenario and a reference tracking scenario. Disturb anc e r eje ction: In this scenario, the controller will regulate the states of the un balanced disc at the origin, while w e disturb the system b y displacing the disc by hand. W e define the origin of the unbalanced disc system as the uprigh t p osition. F or this scenario, we only presen t results with Controller 1, as it was not p ossible to apply exactly the same disturbance for b oth exp eriments. W e ran the controller online for 20 seconds, and man ually disturb ed the system 5 times by pulling the mass aw ay from the upright p osition. Fig. 4 sho ws the obtained mea- suremen t results during the exp erimen ts. The gra y-shaded areas in the plots indicate the instances where we hav e man ually disturb ed the system. A video of the exp erimen t is a v ailable at https://youtu.be/m9l61lR1Fw4 . F rom the figure, w e can conclude that the designed LPV state- feedbac k controller, whic h is synthesized using only 7 time measuremen ts, can robustly regulate the nonline ar system at the setp oin t of 0 [rad] for the full op erating range. R efer enc e tr acking: In this scenario, w e asses if the designed con trollers can realize arbitrary setp oin ts for the nonlinear system. W e select the sequence of setp oin ts as θ ref = { 0 , π 4 , 0 , π 2 , 0 , 3 π 4 , 0 , π , 0 } that θ ( t ) should trac k in the exp erimen t. In order to ensure reference tracking, we deplo y the controllers in terms of u k = ( K 0 + K 1 p k ) θ k ˙ θ k − θ k, ref 0 . (19) Note that we do not apply a feedforward term here, i.e., the con troller considers ( x, u ) = ([ θ ref 0 ] ⊤ , 0) to be equilibrium p oin ts. Running the exp eriment for 20 sec- onds with either Controller 1 or Controller 2 intercon- nected with the setup yields the measurements plotted in Fig. 5. A video of the exp erimen ts is av ailable at https://youtu.be/SyyUVy1sPsc . The results show that the closed-lo op system achiev es reference tracking along the full op erating range of the nonlinear system with an LPV controller that is designed using only 7 data-p oin ts Fig. 5. Exp erimen tal results with changing setpoint. recorded from the system. Note how ever that due to the lac k of integral action or a feedforw ard term, there is a small steady-state error for some reference p oin ts, which is in accordance with the theory of standard state-feedback design. 3.5 Discussion W e hav e shown that the designed LPV controllers can ac hieve the stability and p erformance ob jectives on the nonlinear system. This is accomplished by measuring a data-dictionary of input-scheduling-state data, where the sc heduling is constructed using a given sc heduling map. Although, the curren t results assume the data is noise free, as w as the case in the initial results on L TI sys- tem, our exp erimen tal results sho w that there is a certain lev el of robustness of the data-driven control la ws that are obtained via this design pro cedure. How ever, prop er guaran tees of p erformance and stability of the closed-loop are not av ailable in case of noise-infected data. W e wan t to note that the synthesis algorithms ga ve n umerical prob- lems for some of the selected windows from the original 1-second-long data set. Hence, even though persistency of excitation holds in terms of a rank condition, it does matter that what the conditioning num b er is asso ciated with ‘ G ’, i.e., the amount of relative information presen t in the chosen windo w. A more quantitativ e measure of information conten t in the data could certainly b e useful to av oid such n umerical difficulties. 4. CONCLUSIONS AND OUTLOOK The exp erimental results presen ted in this work demon- strate that direct data-driven control of nonlinear sys- tems can b e established via LPV data-driv en metho ds. F urthermore, for the deploy ed LPV data-driven control design for the unbalanced disc system, only 7 data-p oints are required to ensure stability and p erformance on the setup. A next step for further impro vemen t of the proposed metho dology is to make it robust to noisy data. REFERENCES Abbas, H.S., T´ oth, R., Petreczky , M., Meskin, N., Moham- madp our V elni, J., and Koelewijn, P .J.W. (2021). LPV mo deling of nonlinear systems: A m ulti-path feedbac k linearization approac h. International Journal of R obust and Nonline ar Contr ol , 31(18), 9436–9465. Alsalti, M., Berb eric h, J., Lop ez, V.G., Allg¨ ower, F., and M ¨ uller, M.A. (2021). Data-Based System Analysis and Con trol of Flat Nonlinear Systems. In Pr o c. of the 60 th IEEE Confer enc e on De cision and Contr ol , 1484–1489. Bresc hi, V., Chiuso, A., and F ormen tin, S. (2022). The role of regularization in data-driven predictiv e control. arXiv pr eprint arXiv:2203.10846 . Coulson, J., Lygeros, J., and D¨ orfler, F. (2019). Data- enabled predictive control: In the shallows of the DeePC. In Pr o c. of the Eur op e an Contr ol Confer enc e , 307–312. De Persis, C. and T esi, P . (2019). F ormulas for Data- Driv en Con trol: Stabilization, Optimality , and Robust- ness. IEEE T r ans. on Automatic Contr ol , 65(3), 909– 924. Ko elewijn, P .J.W. and T´ oth, R. (2019). Physical parame- ter estimation of an unbalanced disc system. T echnical Rep ort TUE CS, Eindhov en Univ ersity of T echnology . Kulcs´ ar, B., Dong, J., v an Wingerden, J.W., and V erhae- gen, M. (2009). LPV subspace identification of a DC motor with unbalanced disc. In Pr o c. of the 15 th IF A C Symp osium on System Identific ation , 856–861. Mark ovsky , I. and D¨ orfler, F. (2021). Behavioral systems theory in data-driven analysis, signal pro cessing, and con trol. Annual R eviews in Contr ol , 52, 42–64. Mark ovsky , I. and Rapisarda, P . (2008). Data-Driven Sim- ulation and Control. International Journal of Contr ol , 81(12), 1946–1959. Mohammadp our, J. and Scherer, C.W. (eds.) (2012). Con- tr ol of Line ar Par ameter V arying Systems with Applic a- tions . Springer. Romer, A., Berb eric h, J., K¨ ohler, J., and Allg¨ ow er, F. (2019). One-Shot V erification of Dissipativity Prop er- ties from Input–Output Data. IEEE Contr ol Systems L etters , 3(3), 709–714. Rotondo, D., Nejjari, F., and Puig, V. (2014). Robust state-feedbac k control of uncertain LPV systems: An LMI-based approach. Journal of the F r anklin Institute , 351(5), 2781–2803. Rugh, W.J. and Shamma, J.S. (2000). Researc h on gain sc heduling. Automatic a , 36(10), 1401–1425. T´ oth, R. (2010). Mo deling and Identific ation of Line ar Par ameter-V arying Systems . Springer. V erho ek, C., Abbas, H.S., T´ oth, R., and Haesaert, S. (2021a). Data-Driven Predictive Con trol for Linear P arameter-V arying Systems. In Pr o c. of the 4 th IF A C Workshop on Line ar Par ameter V arying Systems , v ol- ume 54. V erho ek, C., Berb erich, J., Haesaert, S., Allg¨ ower, F., and T´ oth, R. (2023). Data-driv en Dissipativity Analysis of Linear P arameter-V arying Systems. arXiv pr eprint: arXiv:2303.10031 . V erho ek, C., T´ oth, R., and Abbas, H.S. (2022). Di- rect Data-Driven State-F eedback Control of Lin- ear Parameter-V arying Systems. arXiv pr eprint: arXiv:2211.17182 . V erho ek, C., T´ oth, R., Haesaert, S., and Ko c h, A. (2021b). F undamental Lemma for Data-Driven Analysis of Linear P arameter-V arying Systems. In Pr o c. of the 60 th IEEE Confer enc e on De cision and Contr ol , 5040–5046. Willems, J.C., Rapisarda, P ., Marko vsky , I., and De Moor, B.L.M. (2005). A note on persistency of excitation. Systems & Contr ol L etters , 54(4), 325–329.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment