Observer-based boundary control of distributed port-Hamiltonian systems
An observer-based boundary controller for infinite-dimensional port-Hamiltonian systems defined on 1D spatial domains is proposed. The design is based on an early-lumping approach in which a finite-dimensional approximation of the infinite-dimensiona…
Authors: Jesus Toledo, Yongxin Wu, Hector Ramirez
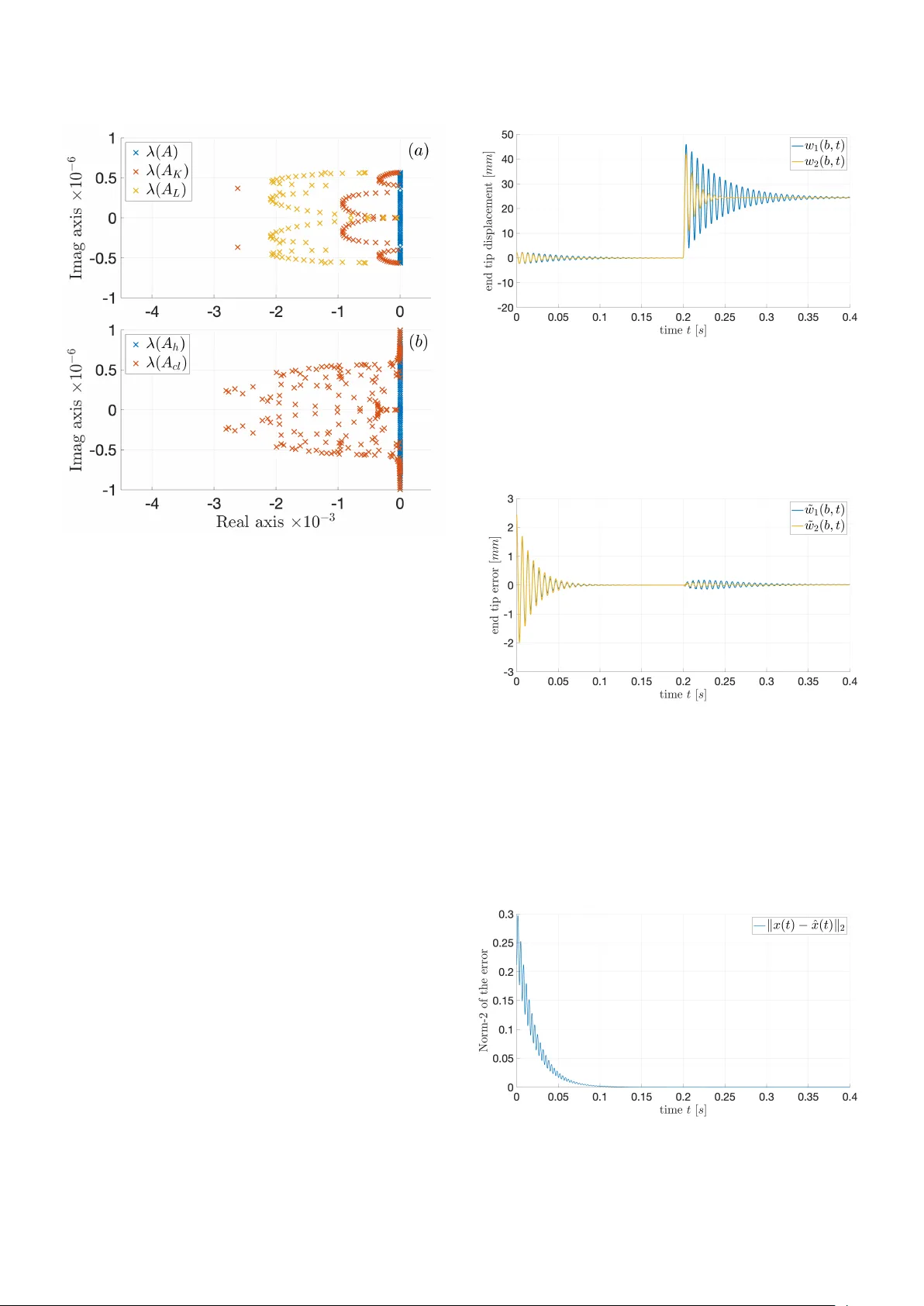
Observer -based boundary control of distrib uted port-Hamiltonian systems Jes ´ us T oledo a , Y ongxin W u a , H ´ ector Ram ´ ırez b , Y ann Le Gorrec a a FEMTO-ST Institute, Univ . Bour gogne F ranche-Comt ´ e, ENSMM, CNRS, 24 rue Savary , F-25000 Besan ¸ con, F rance. jesus.toledo@femto-st.fr , yongxin.wu@femto-st.fr , legorr ec@femto-st.fr . b Department of Electr onic Engineering, Universidad T ´ ecnica F ederico Santa Mar´ ıa, A venida Espa ˜ na 1680, V alparaiso, Chile . hector .ramireze@usm.cl Abstract An observer -based boundary controller for infinite-dimensional port-Hamiltonian systems defined on 1D spatial domains is pro- posed. The design is based on an early-lumping approach in which a finite-dimensional approximation of the infinite-dimensional system derived by spatial discretization is used to design the observer and the controller . As long as the finite-dimensional ap- proximation approaches the infinite-dimensional model, the performances also do. The main contribution is a constructiv e method which guarantees that the interconnection between the controller and the infinite-dimensional system is asymptotically stable. A T imoshenko beam model has been used to illustrate the approach. K eywor ds: infinite-dimensional systems, port-Hamiltonian systems, boundary control systems, Luenberger observ er, state feedback. 1. Introduction Boundary control systems (BCS) (Fattorini, 1968) are a class of control systems where the dynamics are described by par- tial di ff erential equations (PDEs) with actuation and measure- ment situated at the boundaries of the spatial domain. Moti- vated by technological advances, these type of systems have been of great interest for engineers and mathematicians during the last decades since a large class of physical processes can be represented as BCS. This is for instance the case of beams and wa ves in mechanical systems, heat bars and bed reactors in chemical systems or telegraph equations in electronic systems, among others (Curtain and Zwart, 2012). Recently , the control of BCS has been addressed by using the framew ork of port-Hamiltonian systems (PHS) (van der Schaft and Maschke, 2002; Le Gorrec et al., 2005). Boundary con- trolled PHS (BC-PHS) are an extension of the Hamiltonian for - mulation of mechanical systems to open multi-physical systems (Duindam et al., 2009). This formalism has been proven to be particularly suitable for the modeling and control of com- plex physical systems, such as systems described by infinite- dimensional or non-linear models. The stability , stabilization and control synthesis of BC-PHS have been addressed in (V ille- gas et al., 2009; Ramirez et al., 2014; Augner and Jacob, 2014; Macchelli et al., 2017; Ramirez et al., 2017). More recently , the frame work has been extended to deal with rob ust and adap- tiv e regulation (Macchelli and Califano, 2018; Humaloja and Paunonen, 2018). In the case of observer -based control design there are gen- erally two approaches. The first one is the late-lumping ap- proach in which the observer is designed from the infinite- dimensional systems (Guo and Xu, 2007; Meurer, 2013). The main problem comes from the infinite-dimensional aspect of the controller structure that needs to be reduced for practical and real-time implementation. The second one is the early-lumping approach. In this case, the system is first approximated and a finite-dimensional observer is implemented on the reduced order system. The main drawback is the spillover e ff ect in- duced by the use of a reduced order controller on the infinite- dimensional system, leading to high-frequency mode destabi- lization (Bontsema and Curtain, 1988). The main result of this paper is the proposition of a system- atic synthesis method for observer -based boundary controller design for BC-PHS defined on one dimensional spatial do- mains. A finite-dimensional PHS approximation of the BC- PHS is used to design a strictly positive real PHS observer - based state feedback. This approximation is considered precise enough such that in the frequency range of interest the modes of the approximated model are close enough to the one of the original system. The observer is then used to compute the boundary con- trol law for the infinite-dimensional system. Using the pas- sivity properties of power preserving interconnection of PHS it is then possible to guarantee the asymptotic stability of the closed-loop system. The controller hence allo ws to assign the low-frequenc y modes while guaranteeing stable high-frequency modes, avoiding spillover e ff ects. This paper is or ganized as follows: Section 2 gives a background on port-Hamiltonian sys- tems. Section 3 giv es the main result of this work. Section 4 presents a numerical example, namely a boundary actuated one- dimensional T imoshenko beam. 2. Background on port-Hamiltonian systems 2.1. Some notation In this paper , M n ( R ) denotes the space of real n × n matrices and I denotes the identity matrix of appropriate dimensions. Pr eprint submitted to Automatica December 12, 2022 By h· , ·i L 2 or only h· , ·i we denote the standard inner product on L 2 ( a , b ; R n ) and the Sobole v space of order p is denoted by H p ( a , b ; R n ). A detailed description of the class of boundary control systems under consideration can be found in (Le Gor- rec et al., 2005; Jacob and Zwart, 2012). In the next section, we recall some basic properties of this class of systems. 2.2. Boundary contr olled port-Hamiltonian systems The class of one-dimensional PDEs under study , with inputs and outputs at the spatial boundaries, is giv en by the following set of equations P ∂ z ∂ t ( ζ , t ) = P 1 ∂ ∂ζ ( L ( ζ ) z ( ζ , t )) + ( P 0 − G 0 ) L ( ζ ) z ( ζ , t ) , u ( t ) = W f ∂ ( t ) e ∂ ( t ) , z ( ζ , 0) = z 0 ( ζ ) , y ( t ) = e W f ∂ ( t ) e ∂ ( t ) , t ≥ 0 , ζ ∈ [ a , b ] , (1) with t > 0 the time variable and ζ ∈ [ a , b ] the 1D spa- tial coordinate, and z ( ζ , t ) ∈ R n the state variable. P 1 = P T 1 ∈ M n ( R ) is a non-singular matrix, P 0 = − P T 0 ∈ M n ( R ), G 0 = G T 0 ≥ 0 ∈ M n ( R ), L ( · ) ∈ M n ( L 2 ( a , b )) is a bounded and continuously di ff erentiable matrix-v alued function satisfy- ing for all ζ ∈ [ a , b ], L ( ζ ) = L T ( ζ ) and m I < L ( ζ ) < M I with M > m > 0 both scalars independent on ζ . The state space is Z = L 2 ( a , b ; R n ) with inner product h z 1 , z 2 i L = h z 1 , L z 2 i and norm k z k 2 L = h z , z i L , hence Z is a Hilbert space. The norm k · k 2 L is usually proportional to the stored energy of the system, hence z ( ζ , t ) is called energy v ariable and L ( ζ ) z ( ζ , t ) is called co-energy variable. For simplicity , we write z and L z instead of z ( ζ , t ) and L ( ζ ) z ( ζ , t ) unless otherwise stated and arguments of dependent variables may be omitted. Definition 1. Let L z ∈ H 1 ( a , b ; R n ) . Then, the boundary port variables associated with (1) are the vectors f ∂ and e ∂ ∈ R n , defined by f ∂ ( t ) e ∂ ( t ) ! = 1 √ 2 P 1 − P 1 I I ! L ( b ) z ( b , t ) L ( a ) z ( a , t ) ! . (2) Note that, the port-variables are nothing else than a linear combination of the boundary v ariables. W e also define the ma- trix Σ ∈ M 2 n ( R ) as follows Σ = 0 I I 0 ! . (3) The follo wing theorem ensures the e xistence and uniqueness of solutions of (1). Theorem 2. (Le Gorrec et al., 2005) Let W be a n × 2 n r eal matrix. If W has full rank and satisfies W Σ W T ≥ 0 then the system (1) with input u ( t ) = W f ∂ ( t ) e ∂ ( t ) ! (4) is a BCS on Z . Furthermor e, the operator A z = P 1 ∂ ∂ζ ( L z ) + ( P 0 − G 0 ) L z with domain D ( A ) = ( L z ∈ H 1 ( a , b ; R n ) f ∂ ( t ) e ∂ ( t ) ! ∈ ker W ) generates a contr action semigr oup on Z . Let e W be a full rank matrix of size n × 2 n with [ W T e W T ] T in vert- ible and P W , e W giv en by P W , e W = W Σ W T W Σ e W T e W Σ W T e W Σ e W T ! − 1 . (5) Define the output of the system as the linear mapping C : L − 1 H 1 ( a , b ; R n ) − → R n y ( t ) = C z ( ζ , t ) = e W f ∂ ( t ) e ∂ ( t ) ! (6) Then, for u ∈ C 2 (0 , ∞ ; R n ), L z ( ζ , 0) ∈ H 1 ( a , b ; R n ) and u (0) = W f ∂ (0) e ∂ (0) ! the following balance equation is satisfied 1 2 d d t k z ( ζ , t ) k 2 L = 1 2 u ( t ) y ( t ) ! T P W , e W u ( t ) y ( t ) ! (7) Remark 3. The matrix W e W ! Σ W e W ! T = W Σ W T W Σ e W T e W Σ W T e W Σ e W T ! (8) is in vertible if and only if [ W T e W T ] T is in vertible. In this work, we shall consider an early-lumping approach, i.e., the controller and observer are designed on a finite- dimensional approximation of (1). The following assumption is considered Assumption 4. Ther e exists the following finite-dimensional appr oximation of (1) P ˙ x ( t ) = ( J − R ) Q x ( t ) + Bu ( t ) y ( t ) = B T Q x ( t ) (9) wher e x ∈ R n c with n c given by the order of the appr oximation, J = − J T , R = R T ≥ 0 , Q = Q T > 0 all of them in M n c ( R ) and B ∈ R n c × n . Furthermore we assume (9) to be contr ollable and observable. F or simplicity , we shall define A = ( J − R ) Q and C = B T Q and we will r efer to the system ( A , B , C ) as the appr oximated model of (1). Remark 5. Appr oximation schemes which preserve the port- Hamiltonian structure of the original system using mixed finite elements or finite di ff erences on stagger ed grids for instance, can be found in (Seslija et al., 2012; T r enchant et al., 2018). The achie vable closed-loop performances depend on the quality of the approximated model. The or der of the appr oximation n c has then to be chosen lar ge enough such that in the fr equency range of inter est the appr oximated system poles behave similar to the original ones. 2 3. The observer -based controller The main objective of this work is to design a finite- dimensional controller that achieves some desired perfor- mances on the finite-dimensional system (9) while ensuring closed-loop stability when applied to the infinite-dimensional system (1). The considered controller is an observer -based state feedback u ( t ) = r ( t ) − K ˆ x ( t ) (10) where ˆ x ∈ R n c , r ∈ R n and the Luenberger observ er ˙ ˆ x ( t ) = A ˆ x ( t ) + Bu ( t ) + L ( y ( t ) − C ˆ x ( t )) (11) with matrices K ∈ R n × n c , L ∈ R n c × n to be designed and ( A , B , C ) defined in (9). Note that, n c is the size of the observer gi ven by the chosen discretization scheme and n is the number of bound- ary variables. Sev eral issues can arise when using an early-lumping ap- proach to design the control, the most critical one being the loss of stability when the controller is applied on the infinite-dimensional system. It is known as the spillover e ff ect (Bontsema and Curtain, 1988). Consider the following illustra- tiv e example. Example 6. Consider the 1D wave equation with unitary pa- rameters and Neumann boundary contr ol. The system can be written (see Jacob and Zwart (2012) for mor e details) in the form (1) with P 1 = " 0 1 1 0 # , P 0 = G 0 = 0 , L = I 2 . This model is discretized by using finite di ff erences on stagger ed grids in or der to pr eserve the structure of the system. Consider n c = 59 elements for the discretization. G 0 = 0 implies R = 0 thus all the eigen values of A ar e on the ima ginary axis as shown in F igur e 1 (a). ( A , B ) is contr ollable and ( A , C ) observable, hence K and L can be designed such that A K = A − BK and A L = A − LC ar e Hurwitz. Using for instance the Linear Quadratic Re gulator (LQR) method the closed-loop eigen values can be assigned as in F igur e 1 (a). The question that naturally arises is if the same contr ol law , i.e. the same choice of matrices K and L, pr eserves the stabil- ity when applied on the infinite-dimensional system. The an- swer in general is no. In this particular case for instance, when incr easing the or der of the discr etized model to n c = 67 , the closed-loop system turns unstable as shown in F igur e 1 (b). In what follows we start from the achiev able closed-loop per- formances on the finite-dimensional system i.e. an appropriate choice of K , and design the observer gain such that the Luen- berger observer (11) is a strictly positive real PHS. Then we show that since (10) corresponds to a po wer preserving inter- connection between the infinite-dimensional system and the dy- namic boundary controller , the closed-loop system is asymptot- ically stable. Figure 1: (a): λ ( A ): discretized model eigenv alues with n c = 59, λ ( A K ): A − B K eigen values and λ ( A L ): A − LC eigenv alues. (b): λ ( A h ): discretized model eigen values with n c = 67, λ ( A cl ): closed-loop eigen values. 3.1. Some technical r esults Before presenting the main result we give the follo wing def- initions, lemma, corollary and theorem which are instrumental in the proof. Definition 7. A n × n transfer matrix G ( s ) is positive r eal (PR) if G ( s ) + G T ( ¯ s ) ≥ 0 for all s such that Re ( s ) > 0 . Definition 8. A n × n transfer matrix G ( s ) is strictly positive r eal (SPR) if there exists a scalar ε > 0 such that G ( s − ε ) is PR. Lemma 9. (Lefschetz-Kalman-Y akubovich) (T ao and Ioannou, 1988) Assume for the system ( A , B , C , D ) that ( A , B ) is con- tr ollable and ( A , C ) is observable. Then, the transfer matrix G ( s ) = C ( s I − A ) − 1 B + D is SPR if and only if there exist r eal matrices P = P T > 0 , Γ , W 1 and a scalar ε > 0 such that PA + A T P = − Γ T Γ − ε P (12a) C − B T P = W T 1 Γ (12b) D + D T = W T 1 W 1 (12c) Corollary 10. The system ( A , B , C , D ) with A = ( J − R ) Q, C = B T Q and D = 0 is strictly positive r eal if J = − J T , R = R T > 0 and Q = Q T > 0 . Proof . From Lemma 9 choose P = Q and W 1 = 0, then (12c) is trivial, (12b) is C = B T Q and (12a) becomes Γ T Γ = 2 Q RQ − ε Q (13) then, for R > 0 there exists a constant ε > 0 such that the right hand side is positi ve definite, giving a solution for Γ , using for instance Cholesky factorization. See Corollary 7.2.9 in (Horn and Johnson, 2012). The next theorem assures the stability of (1) interconnected in a power preserving w ay with a SPR controller . 3 Theorem 11. (V ille gas, 2007, Ch. 5.1.2) Consider (1) with u ( t ) defined accor ding to Theorem 2 and y ( t ) such that 1 2 d d t k z ( ζ , t ) k 2 L = u T ( t ) y ( t ) , (14) i.e. W Σ W T = e W Σ e W T = 0 and e W Σ W T = I . Consider also a finite-dimensional controller with input u c ( t ) and output y c ( t ) such that its transfer matrix is SPR. Then, the closed-loop sys- tem with the passive inter connection u c ( t ) = y ( t ) (15a) u ( t ) = − y c ( t ) (15b) is well-posed and asymptotically stable. 3.2. Equivalent observer based contr ol by interconnection. In what follows we consider the finite-dimensional approxi- mation (9) of (1). Definition 12. Contr ol by interconnection with a SPR-PH con- tr oller . The consider ed contr ol scheme is shown in F igure 2, wher e the SPR-PH contr oller is given by C ˙ ˆ x ( t ) = ( J c − R c ) Q c ˆ x ( t ) + B c u c ( t ) + Br ( t ) y c ( t ) = B T c Q c ˆ x y r ( t ) = B T Q c ˆ x , (16) with J c = − J T c , R c = R T c > 0 , Q c = Q T c > 0 ∈ R n c × n c , B c ∈ R n c × n and B defined in (9), and (16) is inter connected in a power pre- serving way to the system (9), i.e. such that u c ( t ) = y ( t ) , u ( t ) = r ( t ) − y c ( t ) (17) Figure 2: Control scheme Furthermor e we assume that (( J c − R c ) Q c , B c ) is contr ol- lable. Theorem 13. The contr ol scheme of Definition 12 is asymptot- ically stable and con ver ges to zer o when r ( t ) = 0 . Proof . Consider the total energy as L yapunov function V ( x , ˆ x ) = 1 2 x T Q x + 1 2 ˆ x T Q c ˆ x Then from (9) and (16) we hav e ˙ V ( x , ˆ x ) ≤ − ˆ x T Q c R c Q c ˆ x , where R c > 0 from Definition 12. From Lasalle’ s in v ariance principle the system con verges to the in variant set correspond- ing to ˙ V ( x , ˆ x ) = 0, i.e. k ˆ x k 2 = 0. In this case, from (16), (17) and r = 0 we have u c = y = 0, the controller being controllable. The system (9) being observ able the only equilibrium point is 0. In what follows, we propose to start from the achiev able closed-loop performances obtained by state feedback to build an observer based controller , i.e. J c , R c , Q c and B c in (16) that is strictly positive real, i.e. satisfies the conditions of Corollary 10. Proposition 14. The inter connection of the system (9) with the observer based contr oller (10) - (11) is equivalent to the contr ol by inter connection with the SPR-PH contr oller of Definition 12 if the following matching conditions ar e satisfied ( J c − R c ) Q c = A − BK − LC B T c Q c = K B c = L . (18) Proof . The matching equations (18) are directly obtained re- placing (10) in (11) and identifying with (16) in order to get a passiv e and collocated dynamic controller . 3.3. Main r esult The following proposition is the main contribution of this work. It is based on two main assumptions. Assumption 15. The matrix K has been designed such that A − BK is Hurwitz by using traditional methods such as LQR design, pole-placement or LMI passivity based contr ol, such as for instance in (Prajna et al., 2002). Assumption 16. The matrix R c is chosen such that the follow- ing matrix H M = A K 2 R c − C K − A T K ! (19) with A K = A − BK , C K = − ( K T C + C T K ) , (20) has no pur e imaginary eigen values. Remark 17. A simple choice for R c is R c = α I for some α > 0 small enough such that the matrix (19) has no pur e imaginary eigen values. Proposition 18. Under Assumptions 15 and 16, ther e exists a matrix Q c = Q T c > 0 , solution of the algebraic Riccati equation (ARE) A T K Q c + Q c A K + 2 Q c R c Q c + C K = 0 , (21) such that the matc hing equations (18) are satisfied with J c = 1 2 h A K Q − 1 c − Q − 1 c A T K − Q − 1 c ( K T C − C T K ) Q − 1 c i B c = Q − 1 c K T L = B c . (22) Furthermor e, the matrix A − LC is Hurwitz. 4 Proof . From (K osmidou, 2007) it is known that if the Hamil- tonian matrix (19) has no pure imaginary eigen values then there exists a solution Q c = Q T c > 0 for (21). Hence we only need to prov e that (21) is compatible with the matching equation (18) for J c and L as in (22). Since Q c is in vertible and solution of (21) we hav e R c = − 1 2 h Q − 1 c A T K + A K Q − 1 c + Q − 1 c C K Q − 1 c i = − 1 2 h Q − 1 c A T K + A K Q − 1 c − Q − 1 c ( K T C + C T K ) Q − 1 c i (23) Then using (22) and (23) we hav e ( J c − R c ) Q c = 1 2 (2 A K Q − 1 c − 2 Q − 1 c K T C Q − 1 c ) Q c = A K − Q − 1 c K T C = A K − LC = A − BK − LC (24) which correspond to (18). From Theorem 13 the closed-loop system d d t x ˆ x ! = A − BK B c C ( J c − R c ) Q c ! x ˆ x ! + B B ! r (25) is asymptotically stable. Applying the following transformation x ˜ x ! = I 0 I − I ! x ˆ x ! the closed-loop system (25) can be written d d t x ˜ x ! = A K BK A K − B c C − A c A c + BK ! x ˜ x ! + B B ! r (26) with A K = A − BK , B c = L and A c = ( J c − R c ) Q c = A − BK − LC or equiv alently d d t x ˜ x ! = A − B K BK 0 A − LC ! x ˜ x ! + B 0 ! r (27) Since A K is Hurwitz, and the closed-loop system asymptotically stable, A − LC is also Hurwitz. Theorem 19. Let’ s consider the infinite-dimensional system (1) with u = − K ˆ x and ˆ x solution of the dynamic equation (16) in Pr oposition 18. The closed-loop system is asymptotically sta- ble. Proof . The proof is a direct application of Theorem 11, Propo- sition 14 and Proposition 18. Choosing R c > 0 satisfying As- sumption 16 from Proposition 18 there exists a matrix Q c = Q T c > 0 solution of (21) such that the finite-dimensional ob- server defined by (11) is stable and the matching equations (18) are satisfied. Then, from Proposition 14 the control is equiva- lent to the control by interconnection with a SPR-PH controller . From Theorem 11 the closed-loop system is well posed and asymptotically stable when the finite-dimensional controller is applied to the infinite-dimensional system. Remark 20. One special case of Pr oposition 18 is pr oposed in (W u et al., 2018) in the context of reduced order control of finite-dimensional PHS. Ther e the matrix K obtained by a LQR method and the matrix Q c = Q . 4. Example: the Timoshenk o beam W e consider the boundary control of a Timoshenk o beam clamped at the left side and controlled through force and torque at the right side. Both longitudinal and angular velocities at the right side are used for control purposes. The port Hamilonian formulation of the Timoshenk o beam can be found in (Mac- chelli and Melchiorri, 2004). It can be written in the form (1) with P 1 = 0 1 0 0 1 0 0 0 0 0 0 1 0 0 1 0 , P 0 = 0 0 0 − 1 0 0 0 0 0 0 0 0 1 0 0 0 , L ( ζ ) = T ( ζ ) 0 0 0 0 1 ρ ( ζ ) 0 0 0 0 E I ( ζ ) 0 0 0 0 1 I ρ ( ζ ) , G 0 = 0 where T ( ζ ) is the shear modulus, ρ ( ζ ) the mass per length unit, E I ( ζ ) the product of the Y oung’ s modulus of elasticity E and the moment of inertia of a cross section I , and I ρ ( ζ ) the moment of inertia of a cross section. The state variables are: the shear displacement, the trans- verse momentum distribution, the angular displacement and the angular momentum distribution defined respecti vely by z 1 ( ζ , t ) = ∂ w ∂ζ ( ζ , t ) − φ ( ζ , t ), z 2 ( ζ , t ) = ρ ( ζ ) ∂ w ∂ t ( ζ , t ), z 3 ( ζ , t ) = ∂φ ∂ζ ( ζ , t ) and z 4 ( ζ , t ) = I ρ ( ζ ) ∂φ ∂ t ( ζ , t ), where w ( ζ , t ) and φ ( ζ , t ) are respectively the transverse displacement of the beam and the rotation angle of a neutral fiber of the beam. Note that, T ( ζ ) z 1 ( ζ , t ) is the shear force, 1 ρ ( ζ ) z 2 ( ζ , t ) the longitudinal veloc- ity , E I ( ζ ) z 3 ( ζ , t ) the torque and 1 I ρ ( ζ ) z 4 ( ζ , t ) the angular velocity . W e choose as inputs and outputs u ( t ) = 1 ρ ( a ) z 2 ( a , t ) 1 I ρ ( a ) z 4 ( a , t ) T ( b ) z 1 ( b , t ) E I ( b ) z 3 ( b , t ) , y ( t ) = − T ( a ) z 1 ( a , t ) − E I ( a ) z 3 ( a , t ) 1 ρ ( b ) z 2 ( b , t ) 1 I ρ ( b ) z 4 ( b , t ) The total energy of the beam is defined as H ( t ) = 1 2 k z ( ζ , t ) k 2 L = 1 2 Z b a z T ( ζ , t ) L ( ζ ) z ( ζ , t ) d ζ . and satisfies d d t H ( t ) = y T ( t ) u ( t ) . 4.1. Discr etization The infinite-dimensional system is discretized using finite di ff erences on staggered grids (T renchant et al., 2018) consid- ering 20 elements per state variable, which leads to n c = 80. 5 The finite-dimensional model (9) is then giv en by J = 0 D 0 − F − D T 0 0 0 0 0 0 D F T 0 − D T 0 R = 0 , Q = h Q 1 0 0 0 0 Q 2 0 0 0 0 Q 3 0 0 0 0 Q 4 where Q i , i ∈ { 1 , · · · , 4 } are diagonal matrices containing the ev aluation of T ( ζ ), 1 ρ ( ζ ) , E I ( ζ ) and 1 I ρ ( ζ ) respectiv ely , at the spe- cific points chosen for the discretization. D = 1 h 2 1 0 · · · 0 − 1 1 . . . 0 . . . . . . . . . . . . 0 0 · · · 1 , F = 1 2 h 1 0 · · · 0 1 1 . . . 0 . . . . . . . . . . . . 0 0 · · · 1 , and B = b 11 b 12 0 0 0 0 b 23 0 0 b 32 0 0 0 0 b 43 b 44 with b 11 = 1 h − 1 0 . . . 0 , b 12 = 1 2 − 1 0 . . . 0 , b 23 = 1 h 0 0 . . . 1 , b 43 = 1 2 0 0 . . . 1 b 32 = b 11 , b 44 = b 23 . The state variables are x ( t ) = h x d 1 ( t ) T x d 2 ( t ) T x d 3 ( t ) T x d 4 ( t ) T i T where x d i ( t ) ∈ R 20 , i ∈ { 1 , · · · , 4 } and the j − th component of x d 1 , x d 2 , x d 3 and x d 4 correspond respecti vely to the approximation of z 1 (( j − 0 . 5) h , t ), z 2 ( jh , t ), z 3 (( j − 0 . 5) h , t ) and z 4 ( jh , t ), with h = 2 b − a 2 ∗ 20 + 1 = 0 . 0146, and b − a = 0 . 3 m with a = 0. The beam is clamped at the left side and force and torque actuators at the right side are considered, T z 1 ( b , t ) and E I z 3 ( b , t ) respecti vely . Hence b 11 = b 12 = b 32 = 0, which give pairs ( A , B ) controllable and ( A , C ) observable. In this case C = B T Q . 4.2. The observer-based state feedbac k design W e use the parameters of T able 1. Figure 3: (a): λ ( A ): eigenv alues of the discretized model with n c = 80, λ ( A K ): eigen values of A − B K and λ ( A L ): eigenv alues of A − LC . (b): λ ( A h ): discretized model eigen values with n c = 200, λ ( A cl ): closed-loop eigen values. Parameters V alues Unit T 3 . 4531 × 10 5 Pa ρ 0 . 0643 kg . m − 1 EI 37 . 0116 Pa . m 4 I ρ 2 . 1485 × 10 − 6 K g . m 2 [ a , b ] [0 , 0 . 3] m T able 1: Plant parameters. T wo di ff erent state feedbacks K minimizing the cost function J LQR = Z ∞ 0 { x T Q LQR x + u T R LQR u + 2 x T N LQR u } d t are designed using the Matlab@ Control System T oolbox lqr .m . In both designs the ARE algorithm proposed in (Lanzon et al., 2008) has been used to solve (21). For the first design, the matrix K is performed choosing Q LQR = 0 . 8 I n c , R LQR = 10 I 4 and N LQR = 0, while the matrix L is designed follo wing Proposition 18 with R c = 10 I n c . The eigen values of the matrices A , A − B K and A − LC are sho wn in Figure 3 (a). The eigenv alues of the closed-loop system using the same controller on a higher order discretization of the beam, choosing n c = 200, are gi ven in Figure 3 (b). For the second design, the matrix K is performed choosing Q LQR = 0 . 8 I n c , R LQR = 1 . 33 I 4 and N LQR = 0, while the matrix L is designed following Proposition 18 with R c = 4 I n c . The eigen values of the matrices A , A − B K and A − LC are sho wn in Figure 4 (a). The eigenv alues of the closed-loop system using the same controller on a higher order discretization of the beam, 6 Figure 4: (a): λ ( A ): eigenv alues of the discretized model with n c = 80, λ ( A K ): eigen values of A − BK and λ ( A L ): eigenv alues of A − LC . (b): λ ( A h ): eigenv alues of the discretized model with n c = 200, λ ( A cl ): closed-loop eigen values. choosing n c = 200, are giv en in Figure 4 (b). In both cases, the closed-loop system remains stable and the high frequency modes are not destabilized. Even if n c → ∞ , the closed-loop eigen values do not cross the imaginary axis. 4.3. Simulations Simulations are performed using Matlab ov er the time in- terval t ∈ [0 , 0 . 4] s . The simulation starts from the initial condition z 1 ( ζ , 0) = 0 . 2896 × 10 − 4 , z 2 ( ζ , 0) = 0, z 3 ( ζ , 0) = − 0 . 2702 ζ + 0 . 0811 and z 4 ( ζ , 0) = 0 corresponding to the equi- librium position associated to a force of 10 N applied at the end tip of the beam. The initial condition for the observer is set to zero, i.e. ˆ x (0) = 0. An external force r ( t ) = 100 N is applied at t = 0 . 2 s at the end of the tip to modify the equilibrium po- sition. In the first simulation the observer -based controller of size 80 and designed on the discretized model for 20 elements is applied to the lar ge scale system obtained considering 50 dis- cretization elements, i.e. 200 state varibles. Figure 5 shows the time responses for the two controllers proposed in subsection 4.2, where w 1 ( b , t ) and w 2 ( b , t ) are the end tip displacements of the beam for the first and second design respecti vely . Note that, before t = 0 . 2 s the con vergence to the null equilibrium is due to the observer and state feedback dynamics. After the step at t = 0 . 2 s , the conv ergence is mostly due to the state feedback as the observer already conv erged to the system state ov er the considered range of frequencies. Figure 5: w i ( b , t ): end tip displacement for the design i = { 1 , 2 } . The estimated values are given by ˆ w 1 ( b , t ) and ˆ w 2 ( b , t ), the error is obtained by ˜ w i ( b , t ) = w i ( b , t ) − ˆ w i ( b , t ) and it is shown in Figure 6 for both designs. Figure 6: ˜ w i ( b , t ): observer error of the end tip displacement for the design i = { 1 , 2 } . In Figure 7 is giv en the ev olution of the norm of the error between the system state, that has been used for control design, and the observer state, with respect to time when considering di ff erent initial conditions. Figure 7 illustrates the conv ergence rate of the observer on the reduced order system. Figure 7: Evolution of the norm of the error between the observer and the discretized model to initial conditions. 7 Since the controller is designed based on a finite-dimensional approximation P of the system, but at the end, has to be im- plemented on the infinite-dimensional system P , it is interest- ing to compare the behavior of both closed-loop systems. For that purpose, we denote by w P ( b , t ) the end tip displacement when applying the controller to the finite-dimensional model P used for the design (20 elements) and by w P ( b , t ) the end tip displacement when applying the controller to a higher di- mensional model stemming from a fine approximation of the infinite-dimensional model P (obtained for 50 elements). The appr oximation err or e i ( b , t ) = w P i ( b , t ) − w P i ( b , t ) is shown in Figure 8 for both designs. W e can notice that the appr oxima- tion err or increases for high frequencies signals, meaning per- formances cannot be guaranteed over all frequencies. Y et the error remains small with respect to the higher order approxima- tion. Figure 8: Discretization error e i ( b , t ) = w P i ( b , t ) − w P i ( b , t ) for the design i = { 1 , 2 } . Finally , a ne w simulation is done using the second design for t ∈ [0 . 0 . 2] with the same initial conditions than before and an external force step applied at t = 0 . 1 s . The deformation of the beam along the space and over time is shown in Figure 9. The oscillations ocurring during the first 0 . 1 s are due to the observer con vergence since the system and the observer do not hav e the same initial conditions. Figure 9: Displacement of the beam for time t ∈ [0 , 0 . 2] and space ζ ∈ [0 , 0 . 3]. Figure 10 sho ws the evolution of the system and observer energies with respect to time when considering di ff erent initial conditions. W e can see that the observer energy function con- ver ges to the plant energy function, and at the same time the control brings the closed-loop energy function to zero. Figure 10: Evolution of the system and observer energy functions with respect to initial conditions. 5. Conclusion An observer based boundary controller has been proposed for a class of boundary controlled PHS defined on a 1D spa- tial domain. The design is based on an early-lumping ap- proach in which a finite-dimensional PHS approximation of the infinite-dimensional system is used to design the observer and the controller . The main contrib ution is a constructi ve method that guarantees that the finite-dimensional dynamic boundary controller is a strictly positiv e real PHS. This guarantees that the interconnection between the controller and the infinite- dimensional system is asymptotically stable. As soon as the finite-dimensional approximation of the system that is used for the observer design is close to the infinite-dimensional system ov er the considered range of frequencies, the closed-loop per- formances on the infinite-dimensional system are close to the ones obtained on the finite-dimensional approximation. The stabilization of a T imoshenko beam with force and torque ac- tuators and collocated measurements (velocities) has been used to illustrate the approach. Acknowledgements This work has been supported by the French-German ANR- DFG INFIDHEM project ANR-16-CE92-0028 and the the EIPHI Graduate School (contract ANR-17-EURE-0002). The second author has receiv ed founding from Bour gogne-Franche- comt ´ e Region ANER 2018Y -06145. The third author acknowl- edges Chilean FONDECYT 1191544 and CONICYT B ASAL FB0008 projects. The fourth author has recei ved funding from the European Unions Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie grant agree- ment No 765579. 8 References Augner , B., Jacob, B., 2014. Stability and stabilization of infinite-dimensional linear port-hamiltonian systems. Evolution Equations and Control Theory 3, 207–229. Bontsema, J., Curtain, R.F ., 1988. A note on spillover and rob ustness for flexi- ble systems. IEEE Transactions on Automatic Control 33, 567–569. Curtain, R.F ., Zwart, H., 2012. An introduction to infinite-dimensional linear systems theory . volume 21. Springer Science & Business Media. Duindam, V ., Macchelli, A., Stramigioli, S., Bruyninckx, H., 2009. Modeling and control of complex physical systems: the port-Hamiltonian approach. Springer Science & Business Media. Fattorini, H., 1968. Boundary control systems. SIAM Journal on Control 6, 349–385. Guo, B.Z., Xu, C.Z., 2007. The stabilization of a one-dimensional wave equa- tion by boundary feedback with noncollocated observation. IEEE Transac- tions on Automatic Control 52, 371–377. Horn, R.A., Johnson, C.R., 2012. Matrix analysis. Cambridge uni versity press. Humaloja, J., Paunonen, L., 2018. Robust regulation of infinite-dimensional port-Hamiltonian systems. IEEE T ransactions on Automatic Control 63, 1480–1486. doi: 10.1109/TAC.2017.2748055 . Jacob, B., Zwart, H.J., 2012. Linear port-Hamiltonian systems on infinite- dimensional spaces. volume 223. Springer Science & Business Media. K osmidou, O.I., 2007. Generalized Riccati equations associated with guaran- teed cost control: An overview of solutions and features. Applied Mathe- matics and Computation 191, 511–520. Lanzon, A., Feng, Y ., Anderson, B.D., Rotko witz, M., 2008. Computing the positiv e stabilizing solution to algebraic Riccati equations with an indefinite quadratic term via a recursive method. IEEE Transactions on Automatic Control 53, 2280–2291. Le Gorrec, Y ., Zwart, H., Maschke, B., 2005. Dirac structures and bound- ary control systems associated with skew-symmetric di ff erential operators. SIAM journal on control and optimization 44, 1864–1892. Macchelli, A., Califano, F ., 2018. Dissipativity-based boundary control of linear distributed port-Hamiltonian systems. Automatica 95, 54 – 62. doi: https://doi.org/10.1016/j.automatica.2018.05.029 . Macchelli, A., Le Gorrec, Y ., Ramirez, H., Zwart, H., 2017. On the synthesis of boundary control laws for distributed port-Hamiltonian systems. IEEE T ransactions on Automatic Control 62, 1700–1713. doi: 10.1109/TAC. 2016.2595263 . Macchelli, A., Melchiorri, C., 2004. Modeling and control of the Timoshenko beam. The distrib uted port Hamiltonian approach. SIAM Journal on Control and Optimization 43, 743–767. Meurer , T ., 2013. On the extended Luenberger -type observer for semilinear distributed-parameter systems. IEEE Transactions on Automatic Control 58, 1732–1743. Prajna, S., van der Schaft, A., Meinsma, G., 2002. An LMI approach to stabi- lization of linear port-controlled Hamiltonian systems. Systems & control letters 45, 371–385. Ramirez, H., Le Gorrec, Y ., Macchelli, A., Zwart, H., 2014. Exponen- tial stabilization of boundary controlled port-Hamiltonian systems with dy- namic feedback. IEEE Transactions on Automatic Control 59, 2849–2855. doi: 10.1109/TAC.2014.2315754 . Ramirez, H., Zwart, H., Le Gorrec, Y ., 2017. Stabilization of infinite di- mensional port-Hamiltonian systems by nonlinear dynamic boundary con- trol. Automatica 85, 61 – 69. doi: https://doi.org/10.1016/j. automatica.2017.07.045 . van der Schaft, A., Maschke, B.M., 2002. Hamiltonian formulation of distributed-parameter systems with boundary energy flow . Journal of Ge- ometry and Physics 42, 166–194. Seslija, M., van der Schaft, A., Scherpen, J.M., 2012. Discrete exterior geom- etry approach to structure-preserving discretization of distributed-parameter port-hamiltonian systems. Journal of Geometry and Ph ysics 62, 1509–1531. T ao, G., Ioannou, P ., 1988. Strictly positive real matrices and the Lefschetz- Kalman-Y akubovich lemma. IEEE Transactions on Automatic Control 33, 1183–1185. T renchant, V ., Ramirez, H., Kotyczka, P ., Le Gorrec, Y ., 2018. Finite dif- ferences on staggered grids preserving the port-Hamiltonian structure with application to an acoustic duct. Journal of Computational Physics 373, 673– 697. V illegas, J., 2007. A Port-Hamiltonian Approach to Distributed Parameter Sys- tems. Ph.D. thesis. Univ ersity of T wente. Netherlands. V illegas, J.A., Zw art, H., Le Gorrec, Y ., Maschk e, B., 2009. Exponential stabil- ity of a class of boundary control systems. IEEE Transactions on Automatic Control 54, 142–147. W u, Y ., Hamroun, B., Le Gorrec, Y ., Maschke, B., 2018. Reduced order LQG control design for port Hamiltonian systems. Automatica 95, 86–92. 9
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment