Probabilistic Noise2Void: Unsupervised Content-Aware Denoising
Today, Convolutional Neural Networks (CNNs) are the leading method for image denoising. They are traditionally trained on pairs of images, which are often hard to obtain for practical applications. This motivates self-supervised training methods such…
Authors: Alex, er Krull, Tomas Vicar
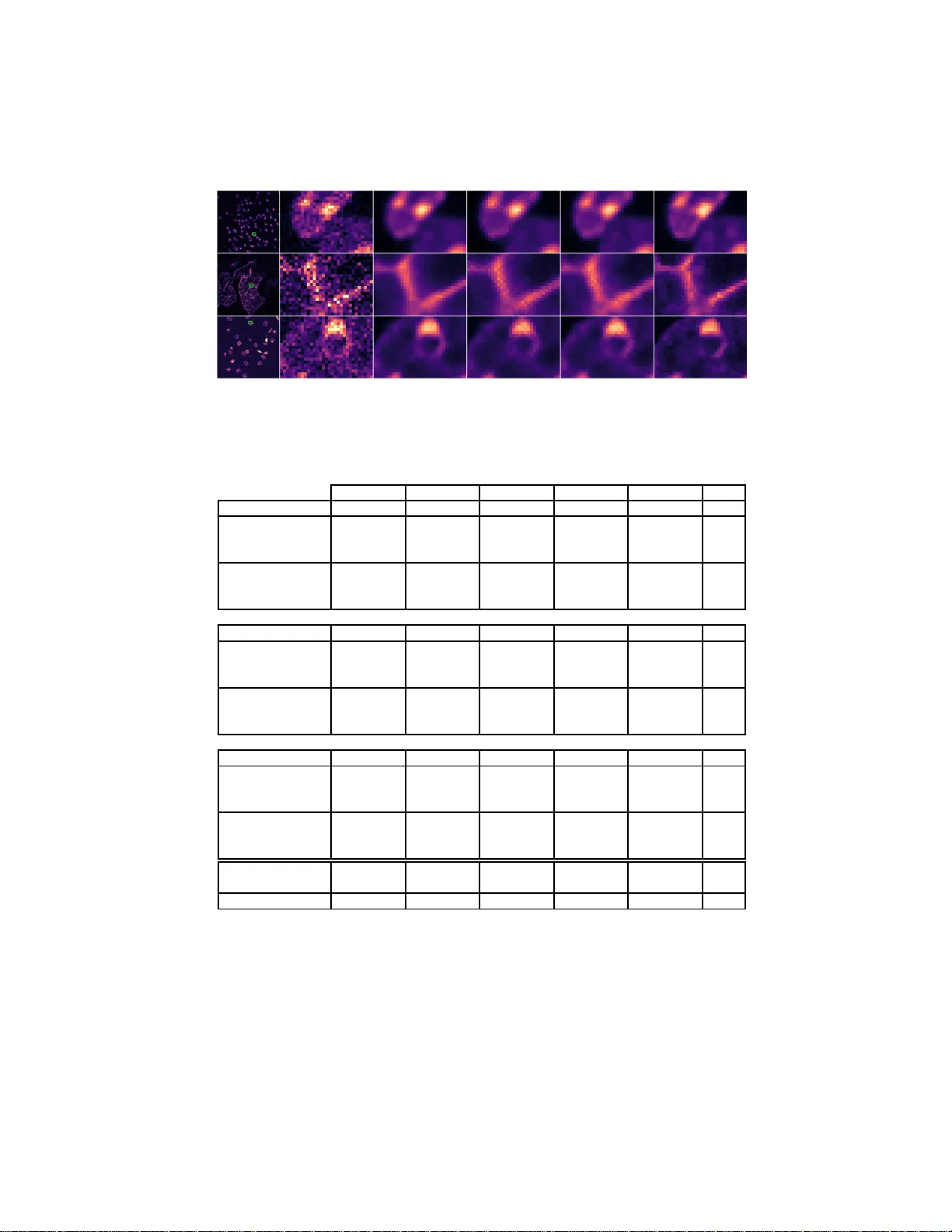
Probabilistic Noise2V oid: Unsup ervised Con ten t-Aw are Denoising Alexander Krull 1 , T om´ a ˇ s Vi ˇ car 2 , Flor ian Jug 1 1 MPI-CBG/PKS (CSBD) 2 Brno Universit y of T ec hnology Abstract. T o day , Con vol utional Neural N etw orks (CNN s) are the lead- ing metho d for image denoising. They are traditionally trained on pairs of images, which are often hard to obtain for p ractical applications. This motiv ates self-superv ised training method s such as Nois e2V oid (N2V) that operate on singl e noisy images. Self-sup erv ised metho ds are, un- fortunately , not comp etitive with mo dels trained on image pairs. Here, w e present Pr ob abilistic Noise2V oid (PN 2V ) , a metho d to train CNNs to predict per-p ixel intensit y distributions. Com b ining these with a suit- able description of th e noise, w e obtain a complete probabilistic m o del for the noisy observ ations and true signal in every pixel. W e ev aluate PN2V on publicly av ailable microscopy datasets, under a b road range of noise regimes, and achiev e comp etitive results with resp ect to sup ervised state-of-the-art metho ds. Keywords: Denoising · CARE · Deep Learning · Microscop y Data 1 In t ro duction Image restoration is the pro ble m of reconstructing a n image from a corrupted version of its e lf. Recent work sho ws how CNNs can b e use d to build powerful conten t-aw are image restoration (CARE) pip elines [11,10,12,13,6,4,1,5]. How- ever, for superv ised CARE mo dels , such as [10], pairs o f clean and no isy images are required. F or many application area s, it is impractical or imp ossible to a cquire clea n ground-truth images [2]. In such cases, Noise2Noise (N2N) tra ining [6] relaxes the problem, only requiring tw o noisy instances of the same data. Unfortunately , even the acquisition o f tw o noisy r e alizations of the same imag e co nten t is often difficult [2]. Self-super vised training metho ds, such as Noise2 V oid (N2V) [4 ], a re a promising alter native, as they oper ate exclusively on single noisy imag es [4,1,5]. This is enabled b y excluding/ masking the cen ter (blind-sp ot) of the netw or k’s receptive fields. Self-super vised training ass umes that the noise is pixel- wis e inde- pendent and that the true intensit y of a pixel can b e predicted from lo ca l image context, excluding b efor e-mentioned blind-spo ts [4]. F or many applications, es- pec ially in the cont ext of micr oscopy imag e s, the firs t assumption is fulfilled, but the second assumption offers ro om fo r improv ements [5]. 2 Alexander Kru ll, T om´ a ˇ s V iˇ car, Florian Jug Hence, self-sup erv is ed mo dels can often not comp ete with super vised tra in- ing [4]. In concurre nt work, by Laine et al. [5 ], this problem was e le g antly ad- dressed by a ssuming a Gaussian noise mo del and predicting Gaussian intensit y distributions p er pix e l. The author s also show ed that the same appro ach an b e applied to other noise distributions, which c an be a pproximated as Gaussia n, or can be descr ibe d a nalytically . Here, we introduce a new training approa ch called Pr ob abilistic Noise2V oid (PN2V) . Similar to [5], PN2V prop o ses a wa y to leverage informa tion of the net- work’s blind-sp ots. Howev er, PN2V is not restricted to Gaussian noise mo dels o r Gaussian in tens ity predictions . Mor e precisely , to compute the pos terior distri- bution of a pixel, we combine ( i ) a ge ne r al noise mo del tha t can b e represe nted as a histog ram (obs erv ation likeliho o d), and ( ii ) a distribution of p ossible true pixel int ensities (prior), represented by a set of pr edicted samples. Having this complete probabilistic mo del fo r each pixel, we are now free to chose whic h statistical estimator to employ . In this work we use MMSE estimates for our fina l pr edictions and show that MMSE-PN2V cons istent ly outp erfor mes other self-sup ervis e d metho ds and, in many cases, leads to results that are com- petitive even with super vised state-of-the-ar t CARE netw or k s (see b e low). 2 Bac kground Image F ormation and the Denoisi ng T a sk: An image x = ( x 1 , . . . , x n ) is the co rrupted version of a cle a n ima ge (sig na l) s = ( s 1 , . . . , s n ). O ur goa l is to recov er the original signal from x , th us implementing a function f ( x ) = ˆ s ≈ s . In this pap er , we as sume tha t ea ch observed pixel v a lue x i is indep endently drawn from the conditional distribution p ( x i | s i ) such that p ( x | s ) = n Y i =1 p ( x i | s i ) . (1) W e will r efer to p ( x i | s i ) a s observatio n likeliho o d . It is descr ibe d by an arbitrar y noise mode l. T raditional T raini ng and Noise2N oise: The function f ( x ) c an b e imple- men ted by a F ully Convolutional Net work (F CN) [7] (see e.g. [11,10,12,6]), a t yp e of CNN that takes an image as input and pr o duces an entire (in this case denoised) image as output. Howev er, in this setup ev ery predicted output pixel ˆ s i depe nds only o n a limited receptive field x RF( i ) , i.e. a patch o f input pixels surrounding it. F CN based image deno is ing in fact implemen ts f ( x ) by pro duc- ing indep endent predictions ˆ s i = g ( x RF( i ) ; θ ) ≈ s i for ea ch pixel i , dep ending only on x RF( i ) instead of on the entire ima ge. The pr ediction is par ametrized b y the w eights θ of the netw o rk. In traditional training, θ are learned from pairs of noisy x j and cor r esp onding clean tr aining images s j , which provide training examples ( x j RF( i ) , s j i ) c o nsisting of noisy input patc hes x j RF( i ) and their corresp onding clean tar get v a lues s j i . Probabilistic Noise2V oid: Unsup ervised Con tent-Aw are D enoising 3 The parameters θ are traditionally tuned to minimize an empirical risk function such as the a verage squared distance argmin θ n X i =1 m X j =1 ( ˆ s j i − s j i ) 2 (2) ov er all training images j and pixels i . In Noise2Noise [6], Leh tinen et al. show that clea n data is in fac t not necess ary for training and that the same training s cheme can b e used with noisy data alone. Noise2Noise us es pairs of corresp onding no isy tr aining ima ges x j and x ′ j , whic h are based on the same signal s j , but ar e c o rrupted indep endently b y no ise (see Eq. 1). Such pair s can for example b e acquired by imag ing a static sample twice. Noise2Noise us es training examples ( x j RF( i ) , x ′ j i ), with the input patch x j RF( i ) cropp ed from the fir s t ima ge x j and the noisy tar get x ′ j i extracted from the patch center in the second one x ′ . It is of c o urse impo ssible for the netw or k to pre dict the noisy pixel v alue x ′ j i from the independently cor rupted input x j RF( i ) . Howev er, as s uming the nois e is zer o centered, i.e. E h x ′ j i i = s j i , the b est achiev able prediction is the clean signal s j i and the net work will lear n to denoise the images it is pre s ent ed with. Noise2V oid T raining: In No ise2V oid, K rull et al. [4 ] show that tra ining is still poss ible when not even noisy training pa ir s are av ailable. The y use single images to extract input and target for their netw orks. If this was done naively , the netw or k would simply learn the ident ity tra nsformation, directly outputting the v alue at the center of each pixel’s rece ptiv e field. Kr ull et al. a ddr ess the issue by effectively removing the central pixel from the netw or ks receptive field. T o achiev e this, they mask the pixel during training, replacing it with a ra ndom v alue from the vicinity . Th us, a Noise2V o id trained netw o r k can b e seen a s a function ˆ s i = ˜ g ( ˜ x RF( i ) ; θ ) ≈ s i , making a prediction for a single pixel based on the mo dified patch ˜ x RF( i ) that excludes the c ent ral pixel. Such a netw o rk can no longer describ e the identit y , and c a n b e tra ined from single no isy images. How ever, this a bilit y co mes at price. The a ccuracy of the predictions is re- duced, as the netw ork has to exclude the central pixel of its receptive field, th us having less information av aila ble. T o allow efficient training of a CNN with No is e2V oid, Krull et al. simultane- ously mask multiple pixels in lar ger training patches and joint ly calculate their gradients. 3 Metho d Maxim um Lik eli ho o d T raining: In P N2V, we build on the idea of masking pixels [4] to obta in a pr ediction from the mo dified rec e ptiv e field ˜ x RF( i ) . Howev er, instead of directly pr edicting an estimate fo r ea ch pixel v a lue , PN2V trains a CNN to describ e a pro bability distribution p ( s i | ˜ x RF( i ) ; θ ) . (3) 4 Alexander Kru ll, T om´ a ˇ s V iˇ car, Florian Jug 0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 s i 0 . 0 0 0 . 0 1 0 . 0 2 0 . 0 3 p r o b a b i l i t y d e n si t y input image average prior MMSE estimate p o st e r i o r p r i o r ( CNN p r e d i c t i o n ) l i k e l i h o o d ( n o i s e m o d e l ) GT MMSE avg. prior input Fig. 1. Image denoising with PN2V. The final MMSE estimate (orange dashed line) for the true signal s i of a pixel (p osition marked in the image insets on the right) corresponds to th e cen ter of mass of the p osterior distribut ion (orange cu rve). Given an observe d n oisy input v alue x i (dashed green line), the p osterior is prop ortional to the p rodu ct of the prior (blue curve) and the observ ation lik eliho o d (green curve). PN2V describes the prior b y a set of samples predicted by our CNN. The likelihoo d is provided b y an arbitrary noise mo del. Blac k dashed line is the true signal of the pixel (GT). Prior and p osterior are visualized using a kernel densit y estimator. W e will r efer to p ( s i | ˜ x RF( i ) ; θ ) a s prior , as it des crib es our knowledge o f the pixel’s signal consider ing only its surro undings, but not the obser v ation at the pixel itself x i , since it has b een excluded fr om ˜ x RF( i ) . W e choos e a s ample based representation for this prior, whic h will be discus sed b elow. Remem be ring that the o bserved pixels v alues a re drawn indepe ndently (E q . 1), we can com bine Eq. 3 with our noise mo del, and obtain the join t distr ibution p ( x i , s i | ˜ x RF( i ) ; θ ) = p ( s i | ˜ x RF( i ) ; θ ) p ( x i | s i ) . (4) By in teg rating ov er a ll po ssible clean s ignals, we can derive p ( x i | ˜ x RF( i ) ; θ ) = Z ∞ −∞ p ( s i | ˜ x RF( i ) ; θ ) p ( x i | s i ) d s i , (5) the probability of obs erving the pixel v alue x i , g iven we know its surr ound- ings ˜ x RF( i ) . W e can now view CNN training as an unsup ervised lear ning task. F ollowing the maximum likelihoo d approa ch, w e tune θ to minimize argmin θ n X i =1 − ln Z ∞ −∞ p ( s i | ˜ x RF( i ) ; θ ) p ( x i | s i ) d s i . (6) Note that in order to improv e re adability , we fro m here on omit the index j , and refrain from explicitly referring to the tra ining ima ge. Sample Based Prior: T o a llow an efficient optimization of Eq. 6 we cho ose a sample bas ed representation of our prior p ( s i | ˜ x RF( i ) ; θ ). F or ev er y pixel i , our netw ork directly predicts K = 800 output v a lues s k i , which we interpret as indep endent sa mples, drawn from p ( s i | ˜ x RF( i ) ; θ ). W e can now approximate Eq. 6 a s argmin θ n X i =1 − ln 1 K K X k =1 p ( x i | s k i ) ! . (7) Probabilistic Noise2V oid: Unsup ervised Con tent-Aw are D enoising 5 During tra ining we use Eq. 7 as loss function. Note that the summation ov er k can be efficiently perfo rmed o n the GPU. Since every sample s k i is effectively a function of the para meters θ , we can calculate the deriv ative with resp ect to any net work parameter θ l as ∂ ∂ θ l n X i =1 − ln 1 K K X k =1 p ( x i | s k i ) ! = n X i =1 − P K k =1 ∂ ∂ s k i p ( x i | s k i ) ∂ s k i ∂ θ l P K k =1 p ( x i | s k i ) . (8) Minimal Mean Squar ed Error (MMSE) Inference: Assuming o ur netw o rk is sufficiently trained, we are now interested in pro cess ing images and finding sensible estimates for every pixel’s signal s i . B a sed on our probabilistic mode l, we derive the MMSE estimate, which is defined as s MMSE i = arg min ˆ s i E p ( s i | x RF( i ) ) h ( ˆ s i − s i ) 2 i = E p ( s i | x RF( i ) ) [ s i ] , (9) where p ( s i | x RF( i ) ) is the p osterior distribution of the signa l g iven the complete surrounding patch. The p os terior is prop ortio nal to the joint distribution given in Eq. 4. W e can thus approximate s MMSE i by weighing our predicted s amples with the corresp onding observ ation lik eliho o d and calculating their average s MMSE i ≈ P K k =1 p ( x i | s k i ) s k i P K k =1 p ( x i | s k i ) . (10) Figure 1 illustrates the pr o cess a nd s hows the inv olved distributions for a c o n- crete pixel in a r eal example. 4 Exp erimen t s The results of o ur e xpe riments can b e found in T a ble 1. In Fig ure 2 we provide qualitative results on realistic test images. Datasets: W e ev aluate PN2V on datasets provided by Zhang et al. in [13]. Since PN2V is not yet implemented for multi-c hannel ima ges, we use all av ailable single-channel datasets. These da ta sets a re r ecorded with different samples and under different ima g- ing conditions. Each of them consists of a total of 20 fields o f view (F OVs). One F OV is reserved for testing. The other 19 ar e use d for tra ining a nd v alida tion. F or each FO V, the data is compos e d of 50 ra w microsco py images, ea ch containing different nois e rea lizations of the same static sample. F or every FOV , Zhang et al. additionally s imulate four reduced noise regimes (NRs) by averaging different subsets o f 2, 4 , 8 , and 16 r aw images [13]. W e will r efer to the r aw images as NR1 and to the regimes c r eated through av era g ing 2, 4, 8, and 1 6 imag es as NR2, NR3, NR4, a nd NR5, re sp e ctively . W e find that in one of the datas ets ( Two -Photon Mic e ) the av er age pixel in- tensity fluctuates heavily over the co urse of the 50 image s, even thoug h it should 6 Alexander Kru ll, T om´ a ˇ s V iˇ car, Florian Jug be approximately constant for each FO V. Considering that a single g round truth image (the av erag e) is used for the ev alua tio n on a ll 50 images, this lea ds to fluc- tuations and distortions in the c a lculated PSNR v a lue s , whic h are a ls o reflected in the compara tively high standard errors (SEMs) for all metho ds, see T a ble 1 . T o account for this incons istency in the data, we additio nally use a v aria nt of the PSNR calculation that is inv aria nt to arbitrary shifts and linear transforma tions in the ground truth sig nal. These v alues are ma r ked by an a s terisk (*). Details can also be found in the supplementary material 1 . Acquiring Noi se Mo dels: In our exp eriments, w e use a histogram based metho d to measure and de s crib e the noise distribution p ( x i | s i ). W e start with corres p o nding pairs of clean s j and no isy x j images. Her e, we use the av ailable training data from [13] for this purp ose. Ho wev er, in gener al these image s c ould show an a rbitrary test pattern that co vers the desir ed range o f v alues a nd do no t hav e to res emb le the sa mple we a re interested in. W e construct a 2D histog ram (256 × 2 56 bins), with the y- and x-a xis cor resp onding to the clean s j i and noisy pixel v a lues x j i , r esp ectively . By nor malizing every row, we obtain a a probabil- it y distribution for every signal. Considering Eq . 7 , we r equire our mo del to b e differentiable with r esp ect to the s i . T o ensur e this different iability , w e linearly int erp olate along the y - axis of the nor malized histogram, obtaining a mo del for p ( x i | s i ) that is contin uous in s i . Ev al uated Denoising M o dels/ Metho ds: T o put the deno ising r esults of PN2V in to p ersp ective, we compare to v ar io us sta te-of-the-art baselines, includ- ing the s tr ongest published n umbers on the data sets. U-Net (PN2V): W e use a sta ndard U-Net [9]. Our netw or k has a U-Net depth of 3, 1 input channel, and K = 80 0 output c hannels, which ar e int erpreted as samples. W e use a initia l feature channel num b er of 64 in the fist U-Net lay er. W e train our netw ork separately for each NR in each data set. W e use the same masking technique as [4]. F urther details and training parameter s can b e found in the supplemen tary material 1 . U-Net (N2V): W e use the same netw or k a rchitecture as for U-Net (PN2V) but mo dify the outputlay er to pro duce only a s ingle prediction instead of K = 800. The netw ork is trained using the Nois e 2V oid scheme as descr ib ed in [4 ]. All training parameters are identical to U-Net (P N2 V). U-Net (tr ad.): W e use the exa ct same architecture as U-Net (N2V), but tr ain the netw or k using the a v ailable gr ound-truth data and the standard MSE loss (see Eq. 2). All training para meters a re iden tical to U-Net (PN2V) and U-Net (N2V). VST+BM3D: Num ber s ar e taken fro m [13]. The authors fit a Poisson Gaussian noise mo de l to the da ta and then a pply a combination of v aria nce-stabilizing transformatio n (VST) [8] and BM3D filtering [3]. DnCNN: Num ber s a re taken from [13]. DnCNN [12] is an established CNN based denoising architecture that is trained in a s uper vised fashion. N2N: Num ber s ar e taken from [1 3]. The authors tra in a net work according to the N2N sch eme, us ing a n a rchitecture similar to the one pr esented in [6]. 1 The Supp lemen t wil l b e made av ailable so on. Probabilistic Noise2V oid: Unsup ervised Con tent-Aw are D enoising 7 input image i nput crop U-Net (trad.) U-Net (N2V) U-Net (PN2V) ground truth T wo-Photon Mice Confocal Zebrafish Confocal Mice Fig. 2. Qualitative results for three images (rows) from the datasets w e used in th is manuscri pt. Left to right: raw image (NR 1), zoomed inset, predictions by U-Net (trad.), U-Net (N2V), U- Net (PN2V), and ground truth d ata. Confocal Mice NR1 NR2 NR3 NR4 NR5 Mean Input 29.38 ± 0.01 32.44 ± 0.01 35.59 ± 0.01 38.90 ± 0.01 42.64 ± 0.03 35.79 U-Net ( P N2V ) 38.24 ± 0.02 39.72 ± 0.03 41.34 ± 0.03 43.02 ± 0.04 45.11 ± 0.05 41.49 U-Net ( N 2V) 37.56 ± 0.02 38.78 ± 0.02 39.94 ± 0.02 41.01 ± 0.02 41.95 ± 0.02 39.85 VST+BM3D 37.95 39.47 41.09 42.73 44.52 41.15 U-Net ( t rad.) 38.38 ± 0.02 39.90 ± 0.03 41.37 ± 0.03 43.06 ± 0.04 45.16 ± 0.05 41.58 DnCNN 38.15 39.78 41.41 43.11 45.20 41.53 N2N 38.19 39.77 41.28 42.83 44.56 41.33 Confocal Zebrafish Input 22.81 ± 0.02 25.89 ± 0.02 29.05 ± 0.03 32.39 ± 0.03 36.21 ± 0.04 29.27 U-Net ( P N2V ) 32.45 ± 0.02 33.96 ± 0.03 35.48 ± 0.05 37.07 ± 0.06 39.08 ± 0.07 35.61 U-Net ( N 2V) 32.10 ± 0.02 33.34 ± 0.03 34.43 ± 0.04 35.39 ± 0.04 36.21 ± 0.03 34.30 VST+BM3D 32.00 33.75 35.30 36.78 38.32 35.23 U-Net ( t rad.) 32.93 ± 0.03 34.35 ± 0.04 35.67 ± 0.05 37.11+0.06 39.09 ± 0.07 35.83 DnCNN 32.44 34.16 35.75 37.28 39.07 35.74 N2N 32.93 34.37 35.71 37.06 38.65 35.74 Two-Ph oton Mice Input 24.94 ± 0.07 27.83 ± 0.1 30.69 ± 0.15 33.67 ± 0.19 37.72 ± 0.14 30.97 U-Net ( P N2V ) 33.67 ± 0.33 34.58 ± 0.39 35.42 ± 0.42 36.58 ± 0.37 39.78 ± 0.24 36.00 U-Net ( N 2V) 33.42 ± 0.31 34.31 ± 0.36 35.09 ± 0.38 36.08 ± 0.33 37.80 ± 0.14 35.34 VST+BM3D 33.81 34.78 35.77 36.97 39.39 36.14 U-Net ( t rad.) 34.35 ± 0.19 35.32+0.23 36.14 ± 0.27 37.48 ± 0.27 40.28 ± 0.2 36.72 DnCNN 33.67 34.95 36.10 37.43 40.30 36.49 N2N 34.33 35.32 36.25 37.46 39.89 36.65 ∗ U- N et ( PN2V ) 34.84 ± 0.06 36.02 ± 0.07 37.08 ± 0.08 38.28 ± 0.09 40.89 ± 0.07 37.42 ∗ U- N et (N2V) 34.60 ± 0.09 35.77 ± 0.1 36.71 ± 0.1 37.64 ± 0.09 38.49 ± 0.05 36.64 ∗ U- N et (trad.) 35.05 ± 0.05 36.22 ± 0.06 37.28 ± 0.07 38.78 ± 0.1 41.34 ± 0.07 37.73 T able 1. Results of PN2V and b aseline meth o ds on three d atasets from [13 ]. Compar- isons are p erformed on five n oise regimes (N R1-NR5). N umbers rep ort PSNR (dB) ± 2 SEM, av eraged ov er all 50 images in each NR. W e group all sup erv ised/non-sup ervised metho d s and mark the highest val ues in b old. Rows marked by asterisk ( ∗ ) use a scale- and shift-in v ariant PSNR calculation to address inconsisten t acqu isitions in the Two- Photon mic e dataset (see main text ). Comp. times: All CNN based met h od s required b elo w 1s p er image ( NVIDI A TI T AN Xp ); VST+BM3D required on a vg. 6.22s . 8 Alexander Kru ll, T om´ a ˇ s V iˇ car, Florian Jug 5 Discussion W e have intro duced PN2V, a fully probabilis tic approa ch extending self-s uper vised CARE training. PN2V makes use of an arbitrary noise mo del which can be de- termined by analyzing any set of av ailable images that are sub ject to the s ame t yp e of noise. This is a decisive adv antage compared to state-of-the-ar t sup er- vised methods a nd allows PN2V to b e used for many practica l applicatio ns . The muc h improved per formance o f P N2V lies consistently b eyond self- sup e rvised training and can often comp ete with state- of-the-art sup erv is ed meth- o ds. W e see a plethor a of unique applications for PN2V, for ex ample in challeng- ing low-ligh t conditions, where noise t ypically is the limiting facto r for down- stream analysis. Ac knowledgemen ts W e thank Uwe Schmidt, Mar tin W eigert, and T o bias P ietzsch for the helpful discussions. W e thank T obias Pie tzsch for pr o of reading. The computations were per formed on an HPC Cluster at the C e nter for Information Service s and High Performance Computing (ZIH) at TU Dres den. References 1. Batson, J., Roye r, L.: Noise2self: Blind denoising by self-sup ervision. arXiv preprint arXiv:1901.11 365 (2019) 2. Buc hholz, T.O., Jordan, M., Pigino, G., Jug, F.: Cryo -care: Con tent-aw are image restoration for cryo-transmissio n electron microscop y data. In: ISBI (2019) 3. Dab o v, K., F oi, A., Katko vnik, V., Egiazarian, K.: Image denoising by sparse 3-d transform-domain collab orativ e filtering. IEEE T ransactions on Image Pro cessing 16 (8), 2080–20 95 (2007) 4. Krull, A ., Buchholz, T.O., Jug, F.: N oise2v oid - learning denoising from single noisy images. In: CVPR ( 2019) 5. Laine, S., Karras, T., Lehtinen, J., Aila, T.: H igh- quality self-sup ervised d eep image denoising. arXiv preprint arXiv:1901.1 0277 (2019) 6. Lehtinen, J., Munk b erg, J., Hasselgren, J., Laine, S., Karras, T., Aittala, M., Aila, T.: Noise2Noise: Learning image restoration without clean data. In: ICML. p p. 2965–29 74 (2018) 7. Long, J., Shelhamer, E., Darrell, T.: F u lly conv olutional netw orks for semantic segmen tation. In: CVPR. p p. 3431–34 40 (2015) 8. Makitalo, M., F oi, A .: Optimal inversi on of the generalized anscombe t ransforma- tion for p oisson-gaussian noise. IEEE T ransactions on Image Pro cessing 22 (1), 91–103 (2013) 9. Ronneb erger, O., Fischer, P ., Brox, T.: U -net: Con volutional n etw orks for biomed- ical image segmenta tion. In : MICCAI (2015) 10. W eigert, M., , et al.: Con tent-aw are image restora- tion: Pushing the limits of fluorescence microscop y . Na- ture Metho ds (2018). https://doi .org/10. 1038/s4 1592-018-0216-7 , https://do i.org/10.1 038/s41592 - 018- 021 6- 7 11. W eigert, M., Roy er, L., Jug, F., Myers, G.: Isotropic reconstruction of 3d fluores- cence microscopy images using conv olutional neural netw orks. In: Descoteaux, M., Maier-Hein, L., F ranz, A., Jannin, P ., Collins, D .L., D uchesne, S. (ed s.) MICCAI (2017) Probabilistic Noise2V oid: Unsup ervised Con tent-Aw are D enoising 9 12. Zhang, K., Zuo, W., Chen, Y., Meng, D., Zhang, L.: Bey ond a gaussian denoiser: Residual learning of d eep cnn for image denoising. I EEE T ransactions on I mage Processing 26 (7), 3142–3155 (2017) 13. Zhang, Y., Zhu, Y ., Nic hols, E., W ang, Q ., Zhan g, S., Smith , C., H ow ard, S .: A p oisson-gaussian denoising dataset with real fluorescence microscopy images. arX iv preprint arXiv:181 2.10366 (2018)
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment