Optimization-Based Learning Control for Nonlinear Time-Varying Systems
Learning to perform perfect tracking tasks based on measurement data is desirable in the controller design of systems operating repetitively. This motivates the present paper to seek an optimization-based design approach for iterative learning contro…
Authors: Deyuan Meng, Jingyao Zhang
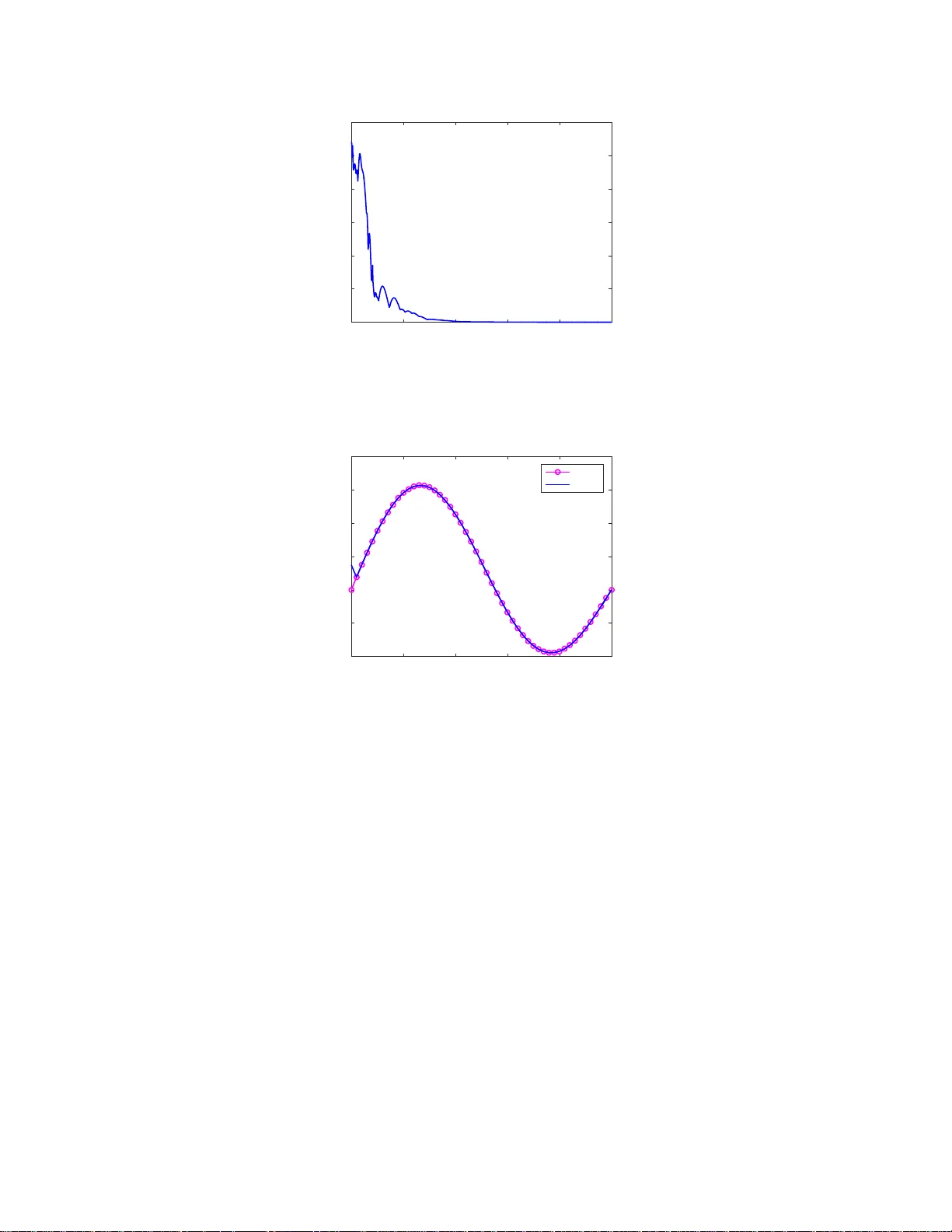
1 Optimizati on-Based Learning Control for Nonlinear T ime-V arying Sy s tems Deyuan Meng and Jingyao Zhang Abstract Learning to perfor m perfect tracking tasks based on measur e ment data is desirab le in th e controller design of systems operatin g repe titively . This motivates the present paper to seek an optimization- based design appr oach f or iterati ve learn ing control (ILC) of repetitive systems with un known nonlinear time- varying dyn amics. It is shown that p erfect outpu t track ing can be realized with up dating inputs, wher e no explicit m odel k n owledge but on ly measure d inpu t/output data are leveraged. In particu lar, adaptive updating strategies are prop osed to obtain parame te r estimations of n onlinearities. A dou ble-dyn amics analysis appr oach is ap plied to establish ILC conver gence, together with boun dedness of inpu t, o utput, and estimated parameters, which bene fits from employing prope r ties of nonnegative matrices. Moreover, robust c o n vergence is explored f or optimization -based a d aptive ILC in the presence of n onrepetitive uncertainties. Simu lation tests are also implemented to verify the validity of our optim ization-based adaptive ILC. Index T erms Adaptive u pdating, iterativ e learning control, nonlin ear system, optimization- based design, robust conv ergence, time-varying system. I . I N T R O D U C T I O N Learning from m easurement data but with no or l i mited model kn owledge has become one of t he most practically imp o rt ant problems in many appl ication fields, s uch as robots, rail trans- portation, and batch processes. Th i s m otiv ates a class of learning control approaches designed by mainly resorting to the measurement data, rather t han to the models for controll ed plants. One of the most popular learning con trol approaches is proposed i n [1] with a focus on acquiring the learning abilit ies of robots from repetitive executions (iterations, trials), leading to t he so-called “iterativ e learning control (ILC)” that is simple and easy to impl ement even with li mited plant The authors are with the Seve nth Research Div ision, Beihang University (BU AA), Beijing 100191 , P . R. China, and also with t he S chool of Automation Science and Electrical Engineering, Beihang Univ ersity (BUAA), Beijing 100191, P . R. China (e-mail: dymeng@bu aa.edu.cn, zhangjingy ao@bua a.edu.cn). 2 knowledge. Due t o the operation executed using only measurement data, ILC i s cons i dered as one of the n at u ral data-driv en cont rol approaches [2]. Since ILC is motivated from the ph y sical learning patterns of human beings [3], it is also catalogued as one of the typical intelligent control approaches [4]. In particul ar , ILC eff ectiv ely applies to general nonlinear plants [5], and robustly works with the capability o f rejecting t he external disturbances, noises and in itial s hifts [6]. One o f th e salient characteristics of ILC is to provide design tools to ove rcome short com ings of con ventional control design approaches. In parti cular , the design of ILC can b e lev eraged to i mprove the transient response performances for the controlled sys tems such that the perfect tracking objectiv es can be derived ev en in the presence of uncertain or unknown system structures and nonlinearities [3]-[5]. This class of high performance tasks can be achie ved over finite time steps gradually with increasing iterations. As a consequence, the con vergence problem for ILC generally refers to the stabil ity with respect to iteration because of t he finite d u ration o f tim e, which is considered as one of t he key probl em s of ILC. There have been many effecti ve meth o ds to deal wit h ILC conv er gence p roblems, especially those b ased on the contraction m apping (CM) principle. T o gain additi o nal con vergence properties, t he optimizati o n -based design together with CM-based analysis has been used as a go od alternative for ILC (see, e.g., [7]-[10]). It has b een reported that optimization-based ILC can be designed to improve the con ver g ence rate, or ev en accomplish the mo n otonic con ver gence to better transient l earning behaviors. In the literature, t here hav e been introduced differe nt classes of design approaches to opt imization- based ILC. The first class is called norm-optimal approach t hat is developed by resorting to the lifted s y stem representation of ILC (see, e.g., [11 ]-[19]). The norm-optimal ILC has wide potential application s for , e.g., robotic systems [11], [12], over head cranes [13] and permanent magnet linear m otors [14], regarding which practical p roblems ha ve also been dis cussed, such as robustness against repetit ive m odel uncertainties [15], [16], improvement of computati onal ef ficiencies [17], [18] and extension to accommodate nonl inear d ynamics [13 ], [19]. The second class i s dev oted to stochastic ILC such that the op t imization-based design can be explored to overc ome i ll effects arising from random (iteratio n-dependent) disturbances and noises (see, e.g., [20]-[23]). It i s worth noting that all aforementioned optimizatio n -b ased ILC approaches are eit her focused directly on l inear syst ems [11], [12], [14]-[18], [20]-[23] or extended from linear systems to nonlinear systems with known lin earized m o dels [13], [19]. By contrast, the third class of opt imization-based ILC approaches has been exploited by directly dealing with nonlinear system s subj ect to u n k nown nonlinearities, which creates data-driv en or model free optimal ILC (s ee, e.g., [24]-[30]). The data-driven optimal ILC requires no explicit mo d el s for algorithm s d esi gn and conv er gence 3 analyses, which is achiev ed b y combining a dynamical linearization approach for nonlinear systems with an adaptive estimati on approach for linearization parameters [24]-[30]. This also leads to a type o f optimizatio n-based adaptive ILC t hat permi ts not o nly the nonlinear s ystems but also their dynami cal linearization models to hav e unknown dynamics and model structures. Furthermore, t h e optimization-based adaptive ILC has a property that its con ver gence analysis can be dev eloped through the CM approach, especially t h rough the eigen value-based CM approach. The eigen value analy s is is wel l known as an easy-to-imp lement and po p ular approach for ILC con ver gence. Howe ver , d esp ite these good prop erti es, the eigen value-based CM approach is restricted t o ILC p rocesses wit h iteration-ind epend ent p arameters based on the basic linear system theory [31 ], [32]. It is worth emphasizing that for nonlinear control plants, the dynami cal li nearization inevitably leads to i t eration-dependent model parameters [24 ]-[30]. This renders the eigen value-based CM approach no lo nger effecti ve i n implementing con ver gence analysi s of opt imization-based adap- tiv e ILC. Another issue left to settl e for optimization -based adapt ive ILC is robustness with regard t o iteration-dependent uncertainties that is considered to be practically important for ILC [33]-[35]. Actually , the robust issue has not been well studied for optimization-based adaptiv e ILC (see, e.g., [24]-[29]). It is mainly due t o that the it eratio n-dependent uncertainties may bring challengi ng difficulties into ILC con vergence in the presence of nonrepetit iveness created by iteration-dependent m odel parameters. T o accommodate the effects arising from nonrepetitiveness, new design and analy s is approaches for ILC u sually need to be explored, see, e.g., [30] for an extended state observer-based desig n approach and [33], [34] for a double- dynamics analysis (DD A) approach. Despite these new approaches, the eigen value analys i s is still l e veraged in [30], and li n ear sy s tems are only addressed in [3 3 ], [34]. In this paper , we contribute to exploiting optimizatio n -based ILC for n o nlinear systems, in which we particularly propose an adaptive updat i ng law for estimation of unknown time-varying nonlinearities. It is sho wn that the boundedness of all estimated parameters can be ensured directly form an optimization-based design. Further , the ILC con vergence is achie ved, together with the bound edn ess of syst em trajectories, for which we introduce a DDA approach by lever - aging good properties of n onnegati ve matrices. W e also explore the robustness of optimizati on- based adaptive ILC wit h respect t o non repeti tiv e uncertainties caused from iteration-dependent disturbances and initial sh ifts. Based on com parisons with t he relev ant existing results, the following main contributions are s u mmarized for our optim ization-based adaptive ILC. 1) W e propose a ne w design method for optimization -based adaptive ILC of nonlinear tim e- var ying systems. It yields a data-driv en optimal ILC algorithm that howe ver differs from those of, e.g., [24]-[30], esp ecially for th e updating law of parameter estim ati on. Addition- 4 ally , an advantage of th e new design m ethod is that all estimated parameters are naturally ensured to be bound ed. 2) W e propose a new analysis method to settl e con vergence problems o f optimization-based adaptiv e ILC. It benefits from implement ing a DD A-based approach to ILC based on properties of nonnegativ e matrices. A consequence of this is the exploration of selecti on conditions for l earning parameters such t h at we n ot onl y exploit t he boundedess of syst em trajectories but also achiev e the perfect out put tracking tasks. Furthermore, ou r ILC con ver- gence results a void performing the eigen value anal y s is t hat is required in, e.g., [24]-[28], [30]. 3) W e de velop robust con ver g ence analysis of opt imization-based adaptive ILC for nonlinear systems in the presence of nonrepetitive uncertainties. It is shown that o ur desi gn and analysis m ethods can be generalized to ov ercome t h e ef fect arising from iteration-dependent disturbances and initial shifts. In comparison with this, the rob ust problem has not been well addressed in, e.g., [24]-[29]. In addition, we carry out sim ulation tests to demonstrate the eff ectiv eness of our algorithm that opt imization-based adaptive ILC bot h guarantees the boundedness of all system t rajectories and achie ves the prescribed perfect tracking tasks. Further , th e robust performances are also illustrated for our optim ization-based adaptiv e ILC, regardless o f disturbances and ini t ial sh ifts that are varying with respect to both iteration and tim e. W e organize the remain der sections o f this p aper as foll ows. In Section II, we present the optimizatio n -based ILC problem, for whi ch an algo rithm of o p timization-based adaptiv e ILC is designed in Section III. The main ILC con vergence results are established i n Section IV, and are further generalized to carry out robust analysis with respect to nonrepetitive u ncertainties in Section V. Simulations are performed, and then conclusions are made, in Sections VI and VII, respectiv ely . T h e proofs of all lemmas are g iven in app end ices. Notations: Let Z + = { 0 , 1 , 2 , · · · } , Z = { 1 , 2 , 3 , · · · } , Z T = { 0 , 1 , · · · , T } with any T ∈ Z , and 1 n = [ 1 , 1 , · · · , 1 ] T ∈ R n . For a matrix A = a i j ∈ R n × m , k A k denotes any norm o f A , where specifically k A k ∞ and k A k 2 are the m axi mum row sum matri x norm and the sp ectral n o rm of A , respectiv ely . Let m = 1 , and then k A k ∞ and k A k 2 become the l ∞ and l 2 norms of a vector A ∈ R n , respectiv ely . When m = n , ρ ( A ) denotes the s p ectral radius of a s quare matrix A ∈ R n × n . W e call A a nonnegati ve m atrix i f a i j ≥ 0, ∀ i = 1, 2, · · · , n , ∀ j = 1, 2, · · · , m , which is denoted by A ≥ 0. A trivial nonnegativ e m atrix induced by A is | A | = a i j ≥ 0, and for any two m atrices A , B ∈ R n × m , A ≥ B m eans A − B ≥ 0. For a matrix sequence { A i ∈ R n × m : i ∈ Z + } , let ∑ j i = h A i = 0 (i.e., t he nul l matrix of appropriate dimension s) if j < h , and for m = n , let ∏ j i = h A i = A j A j − 1 · · · A h if j ≥ h and ∏ j i = h A i = I (i.e., the identi ty matrix of app ro p ri ate dimension s ) if j < h . A difference 5 operator of a vector τ k ( t ) ∈ R n is defined as ∆ : τ k ( t ) → ∆ τ k ( t ) = τ k ( t ) − τ k − 1 ( t ) , ∀ k ∈ Z , ∀ t ∈ Z + . I I . P RO B L E M S TA T E M E N T Consider a class of nonli n ear di s crete-time-va rying systems with in p ut-output dynamics de- scribed by y k ( t + 1 ) = f ( y k ( t ) , · · · , y k ( t − l ) , u k ( t ) , · · · , u k ( t − n ) , t ) with y k ( i ) = 0 , i < 0 y 0 , i = 0 and u k ( i ) = 0 , i < 0 (1) where t ∈ Z T − 1 and k ∈ Z + are the time and iteration indexes, respectively; y k ( t ) ∈ R and u k ( t ) ∈ R are the output and input, respectively; l ∈ Z + and n ∈ Z + are non negati ve integers that represent the system output and input orders, respectively; and f : R × R × · · · × R | {z } l + n + 3 → R is an unk n own n o n linear function. For t he sake of con venience, we writ e t his nonlinear functio n as f or f ( x 1 , x 2 , · · · , x l + n + 3 ) , where x i ∈ R , i = 1 , 2 , · · · , l + n + 3 d enotes the i th independent var iable o f f . Pr oblem S tatement. Gi ven any desired refere nce trajectory y d ( t ) ∈ R ov er t ∈ Z T , the ob j ectiv e of this paper is to desig n an ILC algo ri t hm based on so l ving an optimization probl em such that the uncertain non l inear syst em (1) achieve s t h e follo wing perfect tracking task: lim k → ∞ y k ( t ) = y d ( t ) , ∀ t ∈ Z T \ { 0 } . (2) Correspondingly , w e are interested in th e optimization problem by lever aging the following index over t ∈ Z T − 1 and k ∈ Z (see also [26], [27]): J ( u k ( t )) = " m ∑ i = 1 γ i e k − i + 1 ( t + 1 ) # 2 + λ [ ∆ u k ( t )] 2 (3) where e k ( t ) = y d ( t ) − y k ( t ) denotes the (output) tracking error , ∆ u k ( t ) = u k ( t ) − u k − 1 ( t ) represents the input error between two s equ ent ial it erations, and λ > 0 and γ i > 0, i = 1, 2 , · · · , m are some positive learning parameters. In (3), we consider a high order m ∈ Z for the tracking errors of interest ov er iterations , and adopt e i ( t + 1 ) = 0, ∀ t ∈ Z T − 1 if i < 0. T o address the abovementioned ILC prob lem, we introduce a fundamental assu mption for the continuous dif ferentiability of the unknown nonlin ear function f . (A1) Let f be contin u ously differe ntiable such that the partial d eriva tive s with respect to t he first l + n + 2 independent variables are bounded, namely , ∂ f ∂ x i ( x 1 , x 2 , · · · , x l + n + 2 , t ) ≤ β f , ∀ x i ∈ R , i = 1 , 2 , · · · , l + n + 2 , ∀ t ∈ Z T − 1 (4) 6 where β f > 0 i s some finite bound. Further , l et the input-output coupling function, defined by ∂ f / ∂ x l + 2 , be si gn-fixed, which without any loss of generality is cons idered to be positive, namel y , ∂ f ∂ x l + 2 ( x 1 , x 2 , · · · , x l + n + 2 , t ) ≥ β f , ∀ x i ∈ R , i = 1 , 2 , · · · , l + n + 2 , ∀ t ∈ Z T − 1 (5) for some finite bound β f > 0. Remark 1. In ge neral, the globally Lipschitz condi t ion is one of the basic r equir ements of nonlinear ILC [ 2 ]-[5], which can be satisfied f o r the non linear system (1) under the Assumptio n (A1). T o be specific, if we apply the mean value theor em (see, e.g., [36, P . 651]), then f o r any x i and ¯ x i , i = 1 , 2 , · · · , l + n + 2 , ther e exists some z i = σ x i + ( 1 − σ ) ¯ x i with σ ∈ [ 0 , 1 ] such that f ( x 1 , x 2 , · · · , x l + n + 2 , t ) − f ( ¯ x 1 , ¯ x 2 , · · · , ¯ x l + n + 2 , t ) = l + n + 2 ∑ i = 1 ∂ f ∂ x i ( z 1 , z 2 , ··· , z l + n + 2 , t ) ( x i − ¯ x i ) , ∀ t ∈ Z T − 1 which, together with (4), leads to | f ( x 1 , x 2 , · · · , x l + n + 2 , t ) − f ( ¯ x 1 , ¯ x 2 , · · · , ¯ x l + n + 2 , t ) | ≤ β f l + n + 2 ∑ i = 1 | x i − ¯ x i | , ∀ t ∈ Z T − 1 . Since less plant information on the u n certain nonlinear system (1) is known, an ada p tive ILC law is generally needed t o r each the perfect tracking obj ective (2) via handling the o ptimizatio n pr oblem with the i nde x (3) (see, e.g., [24]-[27]). This re quir es the si gn of the system input- output coupling f unction ∂ f / ∂ x l + 2 to be fixed in the opt i mization-bas ed design of adapti ve ILC, as made in the Assu mption (A1). P articularl y , we can s ee fr om (4) and (5) that ∂ f / ∂ x l + 2 is not only s ign-fixed b ut also bo u nded. Namely , we have ∂ f ∂ x l + 2 ( x 1 , x 2 , · · · , x l + n + 2 , t ) ∈ h β f , β f i , ∀ x i ∈ R , i = 1 , 2 , · · · , l + n + 2 , ∀ t ∈ Z T − 1 . (6) I I I . O P T I M I Z A T I O N - B A S E D A DA P T I V E I L C In this s ection, we present a d esign m ethod for optimization-based adapti ve ILC, regardless of controlled s ystems sub ject to unknown nonli near tim e-varying dynamics. W e thus propose a helpful lemm a to de velop an extended dynamical l inearization for the unknown nonlinear tim e- var ying dynamics such that we may realize an adaptive ILC d es i gn by solving the opt imization problem with t h e index (3). Lemma 1. F or th e nonlinear syst em (1) und er the As s umption (A1), an e xtended dynami cal linearizati on can be g i ven by y i ( 1 ) y i ( 2 ) . . . y i ( T ) − y j ( 1 ) y j ( 2 ) . . . y j ( T ) = Θ i , j u i ( 0 ) u i ( 1 ) . . . u i ( T − 1 ) − u j ( 0 ) u j ( 1 ) . . . u j ( T − 1 ) (7) 7 together with Θ i , j , ∀ i, j ∈ Z + being given in a lower triangular ma trix f orm of Θ i , j = θ i , j , 0 ( 0 ) 0 · · · 0 θ i , j , 1 ( 0 ) θ i , j , 1 ( 1 ) . . . . . . . . . . . . . . . 0 θ i , j , T − 1 ( 0 ) · · · · · · θ i , j , T − 1 ( T − 1 ) of which all nonzer o entr i es can be guaranteed to be bou n ded, namely , for some finit e bound β θ > 0 , θ i , j , t ( ξ ) ≤ β θ , ∀ ξ ∈ Z t , ∀ t ∈ Z T − 1 , ∀ i , j ∈ Z + . (8) In particular , t he diagonal entries o f Θ i , j satisfy θ i , j , t ( t ) ∈ h β f , β f i , ∀ t ∈ Z T − 1 , ∀ i , j ∈ Z + . (9) Pr oof. This lemma can be establish ed based on th e differ ential mean value theorem and with the deriva tion rules of compound functio ns, where t he facts of (4) and (6) should be not iced. For the proof details, we refer the readers to App end i x A. Note t hat to derive (8), we generally hav e β θ ≥ β f in Lemma 1. This leads to the estimation of θ i , j , t ( t ) in a more reasonable form (9), rather than θ i , j , t ( t ) ∈ h β f , β θ i , ∀ t ∈ Z T − 1 , ∀ i , j ∈ Z + . As an application of Lemma 1, we focus upon t he input-output relations h ip between two sequential iterations k and k − 1 for the nonli near system (1). Namely , by letting i = k and j = k − 1 in (7), we can obt ain ∆ y k ( t + 1 ) = t ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) , ∆ − → u k T ( t ) − − − − → θ k , k − 1 , t ( t ) , ∀ t ∈ Z T − 1 , ∀ k ∈ Z (10) where − → u k ( t ) and − − − − → θ k , k − 1 , t ( t ) are defined, respectiv ely , from u k ( t ) and θ k , k − 1 , t ( t ) as − → u k ( t ) = [ u k ( 0 ) , u k ( 1 ) , · · · , u k ( t )] T − − − − → θ k , k − 1 , t ( t ) = θ k , k − 1 , t ( 0 ) , θ k , k − 1 , t ( 1 ) , · · · , θ k , k − 1 , t ( t ) T . In view of th is discussi o n, we p roceed t o explore the “optimal solut ion” for the nonl inear sys t em (1) to sol ve the optimization problem with the index (3). Lemma 2. F or the nonli near system (1) under the Assu m p tion (A1), the solution that o ptimizes the index (3) for t ∈ Z T − 1 and k ∈ Z can be pr esented in an updat ing form of u k ( t ) = u k − 1 ( t ) − γ 2 1 θ k , k − 1 , t ( t ) λ + γ 2 1 θ 2 k , k − 1 , t ( t ) t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) u k ( i ) − u k − 1 ( i ) + γ 1 θ k , k − 1 , t ( t ) λ + γ 2 1 θ 2 k , k − 1 , t ( t ) " γ 1 e k − 1 ( t + 1 ) + m ∑ i = 2 γ i e k − i + 1 ( t + 1 ) # . (11) 8 Pr oof. T o optim i ze the index (3) for the nonl i near system (1), we resort to the condition ∂ J ( u k ( t )) / ∂ u k ( t ) = 0 and then based on l everaging the fact of (10), we can deduce (11). The proof details are given in App end i x B. Even t h o ugh the in p u t u k ( t ) determi ned by (11) is capable of optim izing the index (3), the implementati o n of (11 ) resorts to the exact informati o n of θ k , k − 1 , t ( i ) , ∀ k ∈ Z , ∀ t ∈ Z T − 1 , ∀ i ∈ Z t . Howe ver , these parameters are unav ailabl e, which are induced by th e dynam i cal l inearization of the unknown nonlin ear tim e-v arying dynami cs in volved in (1) (see Lemma 1). T o overcome this problem, we present a parameter esti mation algorith m wit h respect t o iteration s uch that we can dev el o p an est imated value ˆ θ k , k − 1 , t ( i ) of θ k , k − 1 , t ( i ) , ∀ k ∈ Z , ∀ t ∈ Z T − 1 , ∀ i ∈ Z t . W e explore an optimizatio n -based approach to calculating t hese estimation parameters based on the following index: H − − − − → ˆ θ k , k − 1 , t ( t ) = ∆ y k − 1 ( t + 1 ) − ∆ − − → u k − 1 T ( t ) − − − − → ˆ θ k , k − 1 , t ( t ) 2 + µ 1 − − − − → ˆ θ k , k − 1 , t ( t ) − − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) 2 2 + µ 2 − − − − → ˆ θ k , k − 1 , t ( t ) 2 2 , ∀ t ∈ Z T − 1 , ∀ k ≥ 2 (12) where − − − − → ˆ θ k , k − 1 , t ( t ) is the estimation of − − − − → θ k , k − 1 , t ( t ) , defined as − − − − → ˆ θ k , k − 1 , t ( t ) = ˆ θ k , k − 1 , t ( 0 ) , ˆ θ k , k − 1 , t ( 1 ) , · · · , ˆ θ k , k − 1 , t ( t ) T and µ 1 > 0 and µ 2 > 0 denote two posi t iv e weighting factors. It is worth em p hasizing that (12) shows a new o p t imization ind ex to accomplish the estim ation of unk n own system parameters in optimizatio n -based adaptive ILC, by contrast wi th the existing releva nt results of, e.g., [24]-[30]. Remark 2. F or thr ee terms i n volved in (12), the first term is to pr ovide − − − − → θ k , k − 1 , t ( t ) w ith a r easonab l e estimatio n − − − − → ˆ θ k , k − 1 , t ( t ) , the second term is to r ender − − − − → ˆ θ k , k − 1 , t ( t ) a slowly varying estimation along the iteration axis, while the th ir d term is to guarantee t h e boun dedness of − − − − → ˆ θ k , k − 1 , t ( t ) . It is further expected that − − − − → ˆ θ k , k − 1 , t ( t ) does not con ver ge to zer o with the i ncr easing of iterations. This can be re alized through the selections of two weighting factors in (12). In fact, t he bigger each of t h e weight i ng fa ct o rs is, the more important its weighted term is in (12). As t he candidates, µ 1 = 1 may be dir ectly employed without any loss of gener ality , wher eas a r elatively small µ 2 should be adopt ed to both ensure − − − − → ˆ θ k , k − 1 , t ( t ) to be bounded and avoid it to con ver ge to zer o (e.g., µ 2 = 0 . 001 ma y be used). T o proceed further with the index (12) by finding its o p timal solutio n, the following lemm a presents an updat i ng l aw for th e p arameter est i mation. 9 Lemma 3 . F or t ∈ Z T − 1 and k ≥ 2 , the solution that optimizes the index (12 ) can be pr opo s ed in a n updating fo rm of − − − − → ˆ θ k , k − 1 , t ( t ) = µ 1 µ 1 + µ 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) + 1 µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ∆ y k − 1 ( t + 1 ) − µ 1 µ 1 + µ 2 ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) ∆ − − → u k − 1 ( t ) . (13) Pr oof. This lemma can b e establish ed by optimi zing th e i ndex (12) via a similar idea as the proof of Lemma 2. See Appendix C for the proof details. W e are in position to lev erage the dev elopment of Lemmas 2 and 3 to propose an optim ization- based adaptiv e ILC al g orithm for t he uncertain nonli near system (1). Algorithm 1: Optimization-Based Adaptive ILC 1) do step (S1); 2) let k = 1, and go to st ep 3) to s tart iteration; 3) apply u k − 1 ( t ) to operate the nonlinear s ystem (1); 4) do step (S2) if k ≥ 2; otherwise, go directly to step 5); 5) do step (S3); 6) let k = k + 1, and go back to step 3); in wh ich the steps (S1), (S2) and (S3) are presented as follows. (S1) For any t ∈ Z T − 1 , choose any bo u n ded initial input u 0 ( t ) and in itial estimated v alue ˆ θ 1 , 0 , t ( i ) of θ 1 , 0 , t ( i ) , ∀ i ∈ Z t . In particular , giv en any (small) scalar ε > 0, choose ˆ θ 1 , 0 , t ( t ) such that ˆ θ 1 , 0 , t ( t ) ≥ ε , ∀ t ∈ Z T − 1 . (14) (S2) For any t ∈ Z T − 1 , apply an up d ating law of the parameter estimati o n with respect to each iteration k ≥ 2 and each time s tep i ∈ Z t as ˆ θ k , k − 1 , t ( i ) = µ 1 µ 1 + µ 2 ˆ θ k − 1 , k − 2 , t ( i ) + ∆ u k − 1 ( i ) µ 1 + µ 2 + t ∑ j = 0 ∆ u 2 k − 1 ( j ) ∆ y k − 1 ( t + 1 ) − µ 1 µ 1 + µ 2 t ∑ j = 0 ˆ θ k − 1 , k − 2 , t ( j ) ∆ u k − 1 ( j ) . (15) 10 In particular , if ˆ θ k , k − 1 , t ( t ) < ε , then set ˆ θ k , k − 1 , t ( t ) = ˆ θ 1 , 0 , t ( t ) , ∀ t ∈ Z T − 1 . (16) (S3) For any t ∈ Z T − 1 , apply an updating l aw with respect to the inpu t for each i teration k ∈ Z as u k ( t ) = u k − 1 ( t ) − γ 2 1 ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) u k ( i ) − u k − 1 ( i ) + γ 1 ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) " γ 1 e k − 1 ( t + 1 ) + m ∑ i = 2 γ i e k − i + 1 ( t + 1 ) # . (17) Remark 3. F r om (14) a nd (16), we can obtai n ˆ θ k , k − 1 , t ( t ) ≥ ε , ∀ k ∈ Z , ∀ t ∈ Z T − 1 . This di scloses that ε r epr esents the smallest acceptab l e value of the esti mation ˆ θ k , k − 1 , t ( t ) for the parameter θ k , k − 1 , t ( t ) , ∀ k ∈ Z , ∀ t ∈ Z T − 1 . The applicat ion o f Algo r ithm 1 thus naturally avoids t he zer o con ver gence of ˆ θ k , k − 1 , t ( t ) along th e iteration axis. In par t icular , when notin g (5) or (6), we can also find that (14 ) guarantees ˆ θ 1 , 0 , t ( t ) to have the same sign a s ∂ f / ∂ x l + 2 . It is important fo r the practical implementati on of adaptive ILC. In addition, the Algorithm 1 gr eatl y gener alizes the e xisting opti mization-based adapti ve ILC algorithms in the literatur e. F or example, if we set µ 2 = 0 , then the Alg o rithm 1 colla p ses int o the hig h-or der adaptive ILC algo r ithm of, e.g., [26], [27]; and furthermore , if we take m = 1 , then it becomes the first-or der adaptive ILC algorithm of, e.g., [24], [25]. Remark 4. It is worth highlight i ng th at all the parameters λ , γ i , i = 1 , 2 , · · · , m, µ 1 and µ 2 in volved in the Al gorithm 1 can be consider ed to be time-varying. This is a trivial generalization of ou r optimiza t ion-based adaptive ILC design and will neither affect our fol lowing con ver gence analysis. T o get the upda t ing l a w (15), we intr oduce a novel op t imization-ba sed appr o ach to the estimations of parameters in Lemma 3. As a di r ect b enefit , (15) avoids adding an ad ditional step-size factor to guarantee the boundedness o f estimated parameters in compari s on with the e xisting r esults of, e.g., [26], [27]. I V . C O N V E R G E N C E A N A L Y S I S R E S U LT S W e next contri bute to exploring t he con vergence analysis of the n onlinear syst em (1) t hat operates under the Algorithm 1 o f optimizati o n -based adaptive ILC. T oward t his end, we resort to t he tracking error and can employ (10) to equiv alent ly deriv e e k ( t + 1 ) = e k − 1 ( t + 1 ) − ∆ y k ( t + 1 ) = e k − 1 ( t + 1 ) − t ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) , ∀ t ∈ Z T − 1 , ∀ k ∈ Z (18) 11 in which nonrepetitive (namely , iteration-dependent) uncertain parameters θ k , k − 1 , t ( i ) , ∀ i ∈ Z t , ∀ t ∈ Z T − 1 , ∀ k ∈ Z are i ne vitably inv olved. It may result in challenging difficulties for exploitin g robust con vergence results of ILC. For example, the eigen value (or spectral radius) analysis is not appl i cable any l onger when the system (matrix) parameters o f the resul t ing ILC p rocess are explicitly dependent upon iteration (see [32] for more detailed discussions). The t radi t ional CM-based method of con ver gence analys i s m ay even be no t effecti ve in ILC due t o no n repetitiv e uncertainties (see also [33], [34]). T o make t he abovementioned ob serv ations clearer to follow , we ins ert (17) i n t o (18) and can further deduce e k ( t + 1 ) = e k − 1 ( t + 1 ) − θ k , k − 1 , t ( t ) ∆ u k ( t ) − t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) = " 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) # e k − 1 ( t + 1 ) − m ∑ i = 3 γ 1 γ i θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) e k − i + 1 ( t + 1 ) + κ k ( t ) (19) where κ k ( t ) is a d ri ving si gnal given by κ k ( t ) = γ 2 1 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) ∆ u k ( i ) − t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) . (20) Obviously , we can see from (19) that th e s ystem parameters of the ILC process resulting from the nonlinear system (1) under the Algorithm 1 depend e xplicitly on θ k , k − 1 , t ( t ) and ˆ θ k , k − 1 , t ( t ) and, h ence, are it eration-dependent. This renders t he tradit ional CM-based met h od not applicable to ILC con vergence analysis, especially those CM-based meth ods using eigen value analyses, to overc ome which we apply a DD A approach to optimization-based adaptiv e ILC by levera ging the properties of nonn egative matrices (see [37, Chapter 8]). A. Boun d edness of Estimat ed System P arameters As noted in (19 ) and (20), the un certain parameter θ k , k − 1 , t ( i ) and its estimation ˆ θ k , k − 1 , t ( i ) , ∀ i ∈ Z t both play crucial rol es in o ptimization-based adapt ive ILC along the iteration axis. W ith Lemma 1, we can obtain a basic boundedness property of each parameter θ k , k − 1 , t ( i ) , ∀ i ∈ Z t , whereas we gain the estimation ˆ θ k , k − 1 , t ( i ) , ∀ i ∈ Z t in the process of applying th e Algorit hm 1 to the nonlinear system (1), for whi ch it is needed to determine whether the basic boundedness property h o lds. An affirmati ve answer t o this questi on is provided i n th e following theorem. 12 Theor em 1. F or the nonli near syst em (1), let the Assumption (A1) hold. If the Algori thm 1 is applied, then th e b oundedness of the estimation ˆ θ k , k − 1 , t ( i ) can be guaranteed such that ˆ θ k , k − 1 , t ( i ) ≤ β ˆ θ , ∀ i ∈ Z t , ∀ t ∈ Z T − 1 , ∀ k ∈ Z (21) for some fi nite bo und β ˆ θ > 0 . In par ticular , ˆ θ k , k − 1 , t ( t ) satisfi es ˆ θ k , k − 1 , t ( t ) ∈ ε , β ˆ θ , ∀ t ∈ Z T − 1 , ∀ k ∈ Z . (22) W ith Theorem 1 , it is rev ealed that the est imated p arameters of all th e n o nrepetitiv e uncertain parameters θ k , k − 1 , t ( i ) , ∀ i ∈ Z t , ∀ t ∈ Z T − 1 , ∀ k ∈ Z are bound ed when employing the Algorithm 1 for the no n linear system (1). This bou ndedness resul t resorts to no condit i ons o n the input updating law (17), which is even independent of t h e selections of th e learning parameters λ and γ i , i = 1, 2, · · · , m . Furthermore, Theorem 1 is n aturally ensured with µ 1 > 0 and µ 2 > 0 in the updating l aw (15) for parameter estimatio n but withou t adding a step-size fa ctor in (15), which is d iff erent from, e.g., [26], [27]. T o prove Theorem 1 , a u s eful lemma on the norm estimation of an iteration-depend ent matrix operator is given as follows. Lemma 4. F or any t ≥ 0 and k ≥ 2 , k Q ( ∆ − − → u k − 1 ( t )) k 2 ≤ 1 holds for a squar e matrix Q ( ∆ − − → u k − 1 ( t )) defined as Q ( ∆ − − → u k − 1 ( t )) = I − ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 . (23) Pr oof. The proo f of this lemm a can be giv en by exploiting th e specific symmetric structure of Q ( ∆ − − → u k − 1 ( t )) , where the details are gi ven in Ap p end ix D. W ith Lemma 4, we show the proof of Theorem 1 as follows. Pr oof of Theor em 1. It can be seen t hat (15) in the Algorith m 1 is equiv alently deriv ed from (13) in Lemm a 3. W e thus re visit (13) and can employ (23) to deduce − − − − → ˆ θ k , k − 1 , t ( t ) = µ 1 µ 1 + µ 2 " − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) − ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) ∆ − − → u k − 1 ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 # + ∆ y k − 1 ( t + 1 ) ∆ − − → u k − 1 ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 = µ 1 µ 1 + µ 2 Q ( ∆ − − → u k − 1 ( t )) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) + ∆ y k − 1 ( t + 1 ) ∆ − − → u k − 1 ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 (24) where we also ins ert ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) ∆ − − → u k − 1 ( t ) = ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) . 13 By combining (8) and (10), we can validate | ∆ y k − 1 ( t + 1 ) | = ∆ − − → u k − 1 T ( t ) − − − − − − → θ k − 1 , k − 2 , t ( t ) ≤ k ∆ − − → u k − 1 ( t ) k 2 − − − − − − → θ k − 1 , k − 2 , t ( t ) 2 = k ∆ − − → u k − 1 ( t ) k 2 s t ∑ i = 0 θ 2 k − 1 , k − 2 , t ( i ) ≤ √ t + 1 β θ k k ∆ − − → u k − 1 ( t ) k 2 ≤ √ T β θ k ∆ − − → u k − 1 ( t ) k 2 . (25) W e further e xplore (25) t o derive ∆ y k − 1 ( t + 1 ) ∆ − − → u k − 1 ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 2 ≤ √ T β θ k ∆ − − → u k − 1 ( t ) k 2 2 µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ≤ √ T β θ . (26) W ith Lemma 4, we consi d er (26) for (24) and can obtain − − − − → ˆ θ k , k − 1 , t ( t ) 2 ≤ µ 1 µ 1 + µ 2 Q ( ∆ − − → u k − 1 ( t )) 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) 2 + ∆ y k − 1 ( t + 1 ) ∆ − − → u k − 1 ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 2 ≤ µ 1 µ 1 + µ 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) 2 + √ T β θ (27) which can be adopted to yield − − − − → ˆ θ k , k − 1 , t ( t ) 2 ≤ µ 1 µ 1 + µ 2 k − 1 − − → ˆ θ 1 , 0 , t ( t ) 2 + k − 2 ∑ i = 0 µ 1 µ 1 + µ 2 i √ T β θ . (28) Due to µ 1 / ( µ 1 + µ 2 ) < 1, we can verify with (28) that − − − − → ˆ θ k , k − 1 , t ( t ) 2 ≤ − − → ˆ θ 1 , 0 , t ( t ) 2 + µ 1 + µ 2 µ 2 √ T β θ ≤ β ˆ θ , ∀ t ∈ Z T − 1 , ∀ k ∈ Z (29) where β ˆ θ = max t ∈ Z T − 1 − − → ˆ θ 1 , 0 , t ( t ) 2 + µ 1 + µ 2 µ 2 √ T β θ . Since ˆ θ k , k − 1 , t ( i ) ≤ − − − − → ˆ θ k , k − 1 , t ( t ) 2 , ∀ i ∈ Z t holds, (21) follows as a direct consequence o f (29). In particular , we can develop (22) by also consi d ering that (16) ensures ˆ θ k , k − 1 , t ( t ) ≥ ε . Remark 5. It is worth emphasizin g t hat (24) essential ly gives a nonr epeti t ive system with r espect to iteration becaus e of the system matrix µ 1 Q ( ∆ − − → u k − 1 ( t )) / ( µ 1 + µ 2 ) (s ee also [33], [34]). Despite this issue, we can deve lop a strict cont raction mapping condition as µ 1 µ 1 + µ 2 Q ( ∆ − − → u k − 1 ( t )) 2 ≤ µ 1 µ 1 + µ 2 < 1 , ∀ t ∈ Z T − 1 , ∀ k ≥ 2 (30) 14 and, hence, we can dir ectly implement the CM-based appr oach to the bou n dedness analysis for the est i mation ˆ θ k , k − 1 , t ( i ) of the uncertain pa rameter θ k , k − 1 , t ( i ) , ∀ i ∈ Z t , ∀ t ∈ Z T − 1 , ∀ k ∈ Z . In fact, such a benefit is because of the optimizati on-based design r esult of Lemma 3, which can no longer be gained for µ 2 = 0 . W e can consequently see that we may impr ove the boundedness analysis meth od used in , e.g., [26], [27]. B. Con ver gence of Opt imization-Bas ed Ad a ptive ILC W e proceed to explore the system performances of (1) under the Algorithm 1 of opt imization- based adaptiv e ILC, including the b o undedness of the system trajectories and th e conv er gence of the tracking error . W e thus revisit (19) t hat essenti ally shows a nonrepetit ive higher-order ILC process regarding the tracking error . T o overcome the effec t of higher- order dyn am ics on ILC, we resort t o a liftin g technique to reformul ate (19) as − → e k ( t + 1 ) = P k ( t ) − − → e k − 1 ( t + 1 ) + − → κ k ( t ) (31) where − → e k ( t + 1 ) and − → κ k ( t ) are two vectors defined by − → e k ( t + 1 ) = [ e k ( t + 1 ) , e k − 1 ( t + 1 ) , · · · , e k − m + 2 ( t + 1 )] T ∈ R m − 1 − → κ k ( t ) = [ κ k ( t ) , 0 , · · · , 0 ] T ∈ R m − 1 (32) and P k ( t ) ∈ R ( m − 1 ) × ( m − 1 ) is a correspondingly indu ced matrix in the form of P k ( t ) = p 1 , k ( t ) p 2 , k ( t ) · · · · · · p m − 1 , k ( t ) 1 0 · · · · · · 0 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . 0 · · · 0 1 0 with p 1 , k ( t ) = 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) p i , k ( t ) = − γ 1 γ i + 1 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) , i = 2 , 3 , · · · , m − 1 . (33) For (31), we can deve lop a con ver g ence resul t by le veraging the nonrepetit iv e ILC resul ts of, e.g., [33]. Lemma 5 . F or (31) over any t ∈ Z T − 1 , if (C) th er e e xist so me it eration s equence { ω s ( t ) } ∞ s = 0 and some finite positive in te ger χ ( t ) , satisfying ω 0 ( t ) = 1 and 0 < ω s + 1 ( t ) − ω s ( t ) ≤ χ ( t ) , su ch that ω s + 1 ( t ) − 1 ∏ k = ω s ( t ) P k ( t ) ∞ ≤ η < 1 , ∀ s ∈ Z + 15 then t he following two r esu lts hold: 1) − → e k ( t + 1 ) is bound ed (that i s , sup k ∈ Z + | − → e k ( t + 1 ) | ≤ β − → e ( t ) for some finite boun d β − → e ( t ) > 0 ), pr ovided th at − → κ k ( t ) is bound ed (that is, sup k ∈ Z + − → κ k ( t ) ≤ β − → κ ( t ) for some finite bound β − → κ ( t ) > 0 ); 2) li m k → ∞ − → e k ( t + 1 ) = 0 , pr ovided that lim k → ∞ − → κ k ( t ) = 0 . Pr oof. The two results in this lem ma can be shown by utili zi n g the results i) and ii) in [33, Lemma 2] to (31), respectiv ely . For the condition (C) in Lemma 5, we can verify ω s + 1 ( t ) − 1 ∏ k = ω s ( t ) P k ( t ) ∞ ≤ ω s + 1 ( t ) − 1 ∏ k = ω s ( t ) | P k ( t ) | ∞ , ∀ t ∈ Z + , ∀ k ∈ Z (34) in wh ich | P k ( t ) | , compared with P k ( t ) , becomes a n o nnegati ve matrix give n by | P k ( t ) | = p 1 , k ( t ) p 2 , k ( t ) · · · · · · p m − 1 , k ( t ) 1 0 · · · · · · 0 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . 0 · · · 0 1 0 . W e explore the fact (34) based on the properties of nonn egati ve matri ces, together with using the con vergence resul t of Lemma 5, to establish a con ver gence result with respect to the t rackin g error s atisfying (19). Lemma 6 . F or (19) over any t ∈ Z T − 1 , if 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) + m ∑ i = 3 γ 1 γ i θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ ζ < 1 , ∀ k ∈ Z (35) then t he following two r esu lts hold: 1) e k ( t + 1 ) is bounded (namely , sup k ∈ Z + | e k ( t + 1 ) | ≤ β e ( t ) for some fini te bound β e ( t ) > 0 ), pr ovided that κ k ( t ) is boun d ed (namely , sup k ∈ Z + | κ k ( t ) | ≤ β κ ( t ) fo r some finite bound β κ ( t ) > 0 ); 2) li m k → ∞ e k ( t + 1 ) = 0 , pr ovided that lim k → ∞ κ k ( t ) = 0 . Pr oof. This lemma can be de veloped via a nonnegati ve matrix-based analysis approach and by noting the definiti ons (32 ) and (33). For the proof details, see App endix E . Even though Lemma 6 may help to achiev e the con ver g ence analysis of the tracking error , it is n o lon ger applicable for the bound edn ess analysis of the system trajectories. W e thus resort 16 to the DD A approach to ILC and exploit the d ynamic ev olution of input along the iteration axis to implement the b oundedness analysi s in the presence of nonrepetitive uncertaint i es (see also [33], [34]). T oward this end, we rewrite (17) as u k ( t ) = u k − 1 ( t ) + γ 1 ˆ θ k , k − 1 , t ( t ) m ∑ i = 3 γ i e k − i + 1 ( t + 1 ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) − γ 2 1 ˆ θ k , k − 1 , t ( t ) t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) ∆ u k ( i ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) + γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) [ y d ( t + 1 ) − y k − 1 ( t + 1 )] λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) . (36) As a di rect application of (7) for the initial i teration (i.e., j = 0) and t h e ( k − 1 ) th it eration (i.e., i = k − 1), we can derive y k − 1 ( t + 1 ) = y 0 ( t + 1 ) + t ∑ i = 0 θ k − 1 , 0 , t ( i ) [ u k − 1 ( i ) − u 0 ( i )] = θ k − 1 , 0 , t ( t ) u k − 1 ( t ) + y 0 ( t + 1 ) + t − 1 ∑ i = 0 θ k − 1 , 0 , t ( i ) u k − 1 ( i ) − t ∑ i = 0 θ k − 1 , 0 , t ( i ) u 0 ( i ) . (37) By substituting (37) into (36), we can o b tain u k ( t ) = " 1 − γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) # u k − 1 ( t ) + ψ k ( t ) (38) where ψ k ( t ) is a driving signal gi ven by ψ k ( t ) = γ 1 ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) " ( γ 1 + γ 2 ) t ∑ i = 0 θ k − 1 , 0 , t ( i ) u 0 ( i ) − γ 1 + γ 2 t − 1 ∑ i = 0 θ k − 1 , 0 , t ( i ) u k − 1 ( i ) − γ 1 t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) ∆ u k ( i ) + ( γ 1 + γ 2 ) e 0 ( t + 1 ) + m ∑ i = 3 γ i e k − i + 1 ( t + 1 ) # . (39) W ith (38), we propose a l emma for the b o undedness of the inp u t u k ( t ) wit h respect to any bounded dri ving sig nal ψ k ( t ) . Lemma 7 . F or (38) over any t ∈ Z T − 1 , if 1 − γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ φ < 1 , ∀ k ∈ Z (40) then u k ( t ) i s ensure d to be boun d ed such that sup k ∈ Z + | u k ( t ) | ≤ β u ( t ) ho lds for s o me finite b ound β u ( t ) > 0 , pr ovided that ψ k ( t ) is bounded (i.e., s up k ∈ Z + | ψ k ( t ) | ≤ β ψ ( t ) fo r some fin ite bou nd β ψ ( t ) > 0 ). Pr oof. A consequence of the result i ) of [33, Lemma 2]. 17 Based on the analysis results of Lemmas 6 and 7, we present the foll owing theorem to develop tracking result s for uncertain no nlinear systems usi ng the Algo rithm 1 of op t imization-based adaptiv e ILC. Theor em 2. F or the nonl inear syst em (1), let the A s sumption (A1) be satisfied. If th e Algo r ithm 1 is ap p lied with γ 1 + γ 2 > m ∑ i = 3 γ i , λ > γ 2 1 + γ 1 γ 2 β f β ˆ θ (41) then both bound edness and conv er gence of opti mization-based adapt ive ILC can be ensur ed, namely , 1) the boundedness of the i n put and o u tput trajectories can be guaranteed during the ILC pr ocess such that | u k ( t ) | ≤ β u , ∀ t ∈ Z T − 1 , ∀ k ∈ Z + | y k ( t ) | ≤ β y , ∀ t ∈ Z T , ∀ k ∈ Z + (42) for some fi nite bo unds β u > 0 and β y > 0 ; 2) the perfect tracking objective (2) of ILC can be achieved. Remark 6. F r om Theor em 2, it can be s een that th e Algor ithm 1 is effective i n accompl ishing the perfect o utput trac king tasks of ILC, tog ether with guaranteeing th e boundedness of all the s ystem trajectories, even in the pr esence of unknown nonlinear time-varying dynamics. Mor eover , it is worth highl i ghting that Theor em 2 actu ally pr ovides a cla s s of dat a-driven ILC r esults because the implementat ion o f the nonlinear system (1) under the Algori t hm 1 lever age s only the in p ut and output data. Also, we need quite limited estimation knowledge o f (1) to establish Theor em 2, as well a s t o gain Theor em 1. S i milar contributions have been mad e in, e.g., [26], [27], which however employ the eigen value-based CM approac h to the con ver gence analysis o f ILC and can no longer apply to the analysi s of our r esults . This can be clearly seen fr om (19) and (38) that yield nonr epetitive ILC pr o cesses and make the eigen val u e analysis no t a p p licable for their con ver gence analysis any l o nger (see also [32]). Remark 7. Another issu e worth noticing is the i nter dependent r elation between (19) and (20) for the trac king error dynamics and (38) and (39) for the input dynamics. This nat u rally leads to tha t the con ver gence analysis of the trac king err or and the boundedness analysis of the input ar e inter dependent with each other . Thus, the CM-based appr oach t o ILC can not be adopted to develop Theor em 2, which mot ivates u s t o im p l ement a DD A appr oach. A benefit of employing a DDA a p pr oach is to make t he selection condi tion (41) i ndependent of the length T of the learning t ime interval. It consequently i mpr oves the selectio n condition us ed in, e.g., [27] th a t depends h eavily on the length of the learning time interval . 18 Remark 8. In particul a r , the r esults of Theor em 2 as well as o f Theor em 1 ar e applicable for nonlinear s ystems that ar e time-in varia nt and, h ence, can generalize the existing optimizatio n - based adaptive ILC r esults of, e.g., [24]-[28]. Anot her special case i s to consi der the first-or der optimizat i on-based adapti ve ILC (i.e., m = 1 ), o ne of the most cons ider ed cases of adaptive ILC for nonlinear ILC. In thi s special case, our derived r esults sti ll work effectively , wher e we only need to take γ i = 0 , i = 2 , 3 , · · · , m in our design and analysis . F or example, when m = 1 , t h e only mo dification o f t h e Algor i thm 1 is that (17) becomes u k ( t ) = u k − 1 ( t ) + γ 2 1 ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ( e k − 1 ( t + 1 ) − t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) [ u k ( i ) − u k − 1 ( i )] ) and Theore ms 1 and 2 hol d, fo r which the selection condition (41) col lapses into λ > γ 2 1 β f β ˆ θ . Although Lem mas 6 and 7 show prelimin ary analysis results for the deve lopment o f Th eorem 2, t h ey resort to two different conditions (35) and (40). T o overcome th i s issue, we int roduce a helpful lemma to di s close the relations among the cond itions (35), (40) and (41). Lemma 8 . F or the non linear s ystem (1) un d er t he As sumption (A1), if the condition (41) is satisfied, t hen both con d i tions (35) and (40) can be simul t aneously guaranteed. Pr oof. This lemma can be proved wit h the boundedness result s of L em ma 1 and Theorem 1, where the p roo f details are give n in Appendix F. Now , by ut i lizing Lem m as 6 – 8 , we are in posi tion to present the proof of Theorem 2, for which a DD A approach instead of the eigen value-based analysis approach to ILC is implem ented. Pr oof of Theor em 2. It foll ows by Lemm a 8 th at the selection condition (41) in this theorem ensures the validity of Lemmas 6 and 7. Then we perform ind u ction over t ∈ Z T − 1 to complete this proof with two steps. Step i): Let t = 0 , a nd then we pr ove that lim k → ∞ e k ( 1 ) = 0 , lim k → ∞ ∆ u k ( 0 ) = 0 , and sup k ∈ Z + | u k ( 0 ) | ≤ β u ( 0 ) for som e finit e bound β u ( 0 ) > 0 . From (20), it follows κ k ( 0 ) = 0, ∀ k ∈ Z + . W e hence consid er Lemma 6 for (19) and can obtain sup k ∈ Z + | e k ( 1 ) | ≤ β e ( 0 ) and lim k → ∞ e k ( 1 ) = 0 (43) for some finite bound β e ( 0 ) > 0 . From (17), we can deduce ∆ u k ( 0 ) = γ 1 ˆ θ k , k − 1 , 0 ( 0 ) λ + γ 2 1 ˆ θ 2 k , k − 1 , 0 ( 0 ) " γ 1 e k − 1 ( 1 ) + m ∑ i = 2 γ i e k − i + 1 ( 1 ) # 19 which, to g ether wi th (22) and (43), leads to li m k → ∞ ∆ u k ( 0 ) = 0. In addition, we know from (39) that ψ k ( 0 ) = γ 1 ˆ θ k , k − 1 , 0 ( 0 ) λ + γ 2 1 ˆ θ 2 k , k − 1 , 0 ( 0 ) " ( γ 1 + γ 2 ) θ k − 1 , 0 , 0 ( 0 ) u 0 ( 0 ) + ( γ 1 + γ 2 ) e 0 ( 1 ) + m ∑ i = 3 γ i e k − i + 1 ( 1 ) # and then by the boundedness results of L em ma 1 and Theorem 1, we can derive | ψ k ( 0 ) | ≤ γ 1 β ˆ θ λ + γ 2 1 ε 2 " ( γ 1 + γ 2 ) β θ | u 0 ( 0 ) | + m ∑ i = 1 γ i β e ( 0 ) # , β ψ ( 0 ) . (44) W ith (44), the use of Lemma 7 yi elds sup k ∈ Z + | u k ( 0 ) | ≤ β u ( 0 ) for so m e finite bound β u ( 0 ) > 0. Step ii): F or t = 0 , 1 , · · · , N − 1 with any given N ∈ Z T − 1 , l et lim k → ∞ e k ( t + 1 ) = 0 , l im k → ∞ ∆ u k ( t ) = 0 , and sup k ∈ Z + | u k ( t ) | ≤ β u ( t ) fo r so me finite bound β u ( t ) > 0 . Then, for t = N , we will pr ove that the hypothesis made for the two conv er gence r esults and o n e boundedness r esult also holds. W ith the hypothesis made for the time steps 0, 1, · · · , N − 1 in Step ii) and by appl y ing the boundedness results of Lemma 1 and Theorem 1, we can employ (20) to verify | κ k ( N ) | = γ 2 1 θ k , k − 1 , N ( N ) ˆ θ k , k − 1 , N ( N ) λ + γ 2 1 ˆ θ 2 k , k − 1 , N ( N ) N − 1 ∑ i = 0 ˆ θ k , k − 1 , N ( i ) ∆ u k ( i ) − N − 1 ∑ i = 0 θ k , k − 1 , N ( i ) ∆ u k ( i ) ≤ 2 β θ 1 + γ 2 1 β 2 ˆ θ λ + γ 2 1 ε 2 ! N − 1 ∑ i = 0 β u ( i ) , β κ ( N ) , ∀ k ∈ Z + (45) and | κ k ( N ) | ≤ β θ 1 + γ 2 1 β 2 ˆ θ λ + γ 2 1 ε 2 ! N − 1 ∑ i = 0 | ∆ u k ( i ) | → 0 , as k → ∞ . (46) W e then le verage (45) and (46) and apply Lemma 6 to deduce sup k ∈ Z + | e k ( N + 1 ) | ≤ β e ( N ) and lim k → ∞ e k ( N + 1 ) = 0 (47) for some finite bound β e ( N ) > 0. Since we can use (17) to get ∆ u k ( N ) = − γ 2 1 ˆ θ k , k − 1 , N ( N ) λ + γ 2 1 ˆ θ 2 k , k − 1 , N ( N ) N − 1 ∑ i = 0 ˆ θ k , k − 1 , N ( i ) ∆ u k ( i ) + γ 1 ˆ θ k , k − 1 , N ( N ) λ + γ 2 1 ˆ θ 2 k , k − 1 , N ( N ) " γ 1 e k − 1 ( N + 1 ) + m ∑ i = 2 γ i e k − i + 1 ( N + 1 ) # 20 we follow the same lin es as (46) and insert (47) to deriv e | ∆ u k ( N ) | ≤ γ 2 1 β 2 ˆ θ λ + γ 2 1 ε 2 N − 1 ∑ i = 0 | ∆ u k ( i ) | + γ 1 β ˆ θ λ + γ 2 1 ε 2 " γ 1 | e k − 1 ( N + 1 ) | + m ∑ i = 2 γ i | e k − i + 1 ( N + 1 ) | # → 0 , as k → ∞ which i mplies lim k → ∞ ∆ u k ( N ) = 0. From (39), we can obtain ψ k ( N ) = γ 1 ˆ θ k , k − 1 , N ( N ) λ + γ 2 1 ˆ θ 2 k , k − 1 , N ( N ) " ( γ 1 + γ 2 ) N ∑ i = 0 θ k − 1 , 0 , N ( i ) u 0 ( i ) − γ 1 + γ 2 N − 1 ∑ i = 0 θ k − 1 , 0 , N ( i ) u k − 1 ( i ) − γ 1 N − 1 ∑ i = 0 ˆ θ k , k − 1 , N ( i ) ∆ u k ( i ) + ( γ 1 + γ 2 ) e 0 ( N + 1 ) + m ∑ i = 3 γ i e k − i + 1 ( N + 1 ) # with which we can validate | ψ k ( N ) | ≤ γ 1 β ˆ θ λ + γ 2 1 ε 2 " ( γ 1 + γ 2 ) β θ N ∑ i = 0 | u 0 ( i ) | + γ 1 β θ + γ 2 β θ + 2 γ 1 β ˆ θ N − 1 ∑ i = 0 β u ( i ) + m ∑ i = 1 γ i β e ( N ) # , β ψ ( N ) . (48) Based on (48 ), we cons i der Lem ma 7 for (38) and can deve lop sup k ∈ Z + | u k ( N ) | ≤ β u ( N ) for some finite bo und β u ( N ) > 0. W e can thus conclude that the hypothesis m ade for t = 0, 1, · · · , N − 1 in this step also holds for t = N . By induction based on the analysis of th e above steps i) and ii), we can arri ve at sup k ∈ Z + | u k ( t ) | ≤ β u ( t ) and lim k → ∞ e k ( t + 1 ) = 0 , ∀ t ∈ Z T − 1 (49) with which we can further employ Lemma 6 to get sup k ∈ Z + | e k ( t + 1 ) | ≤ β e ( t ) , ∀ t ∈ Z T − 1 . (50) The use of (50) yields sup k ∈ Z + | y k ( t + 1 ) | ≤ β e ( t ) + | y d ( t + 1 ) | , ∀ t ∈ Z T − 1 , which together with (49) leads to sup k ∈ Z + | u k ( t ) | ≤ β u , ∀ t ∈ Z T − 1 and sup k ∈ Z + | y k ( t ) | ≤ β y , ∀ t ∈ Z T by t aking β u = max t ∈ Z T − 1 β u ( t ) β y = max | y 0 | , max t ∈ Z T − 1 { β e ( t ) + | y d ( t + 1 ) |} . W e can also derive from (49) that the perfect tracking objective (2) hol ds. The proof of Theorem 2 is com plete. 21 V . R O B U S T N E S S V . S . N O N R E P E T I T I V E U N C E RT A I N T I E S In this section, we cont ribute to in volving the rob ust analysis of optimization-based adapti ve ILC, regardless of nonrepetitive uncertaint i es arisin g from it eratio n-dependent di sturbances and initial s hifts. W e thus consider the following no nlinear sy s tem: y k ( t + 1 ) = f ( y k ( t ) , · · · , y k ( t − l ) , u k ( t ) , · · · , u k ( t − n ) , t ) + w k ( t ) with y k ( i ) = 0 , i < 0 y 0 + δ k , i = 0 and u k ( i ) = 0 , i < 0 (51) where, by contrast to (1), w k ( t ) and δ k denote the nonrepetitive dis t urbance and initi al shift, respectiv ely . Due t o the presence of nonrepetitive uncertainties, t he perfect tracking task (2) m ay no lon ger be achieved in general, and instead a robust tracking task i s usually consi dered of practical importance such that th e tracking error can be decreased to a small neighborhood of the origin with increasing iterations, namely , lim s up k → ∞ | e k ( t + 1 ) | ≤ β e sup ( t ) , ∀ t ∈ Z T − 1 (52) where β e sup ( t ) > 0 is a small bo u nd that depends continuousl y on thos e of the nonrepetitive uncertainties. T o impl ement the robust ILC task, we imp ose an assum ption on the boundedness of nonrepet- itive uncertainties. (A2) Let w k ( t ) and δ k be bounded s u ch that | w k ( t ) | ≤ β w ( t ) , ∀ t ∈ Z T − 1 , ∀ k ∈ Z + | δ k | ≤ β δ , ∀ k ∈ Z + (53) for some finite bound s β w ( t ) > 0 and β δ > 0. Note that i n the ILC literature, (A2) is a comm on considered assu mption for the class of nonrepetitive un certaint ies because it can be generally acceptable in m any practical situati ons (see, e.g., [33], [34]). Of particular not e is to ensure the con ver gence of n o nrepetitive uncertainties such t hat lim k → ∞ [ w k ( t ) − w k − 1 ( t )] = 0 , ∀ t ∈ Z T − 1 , lim k → ∞ ( δ k − δ k − 1 ) = 0 (54) which may be considered as an additi onal requirem ent of (A2) for the accomplishm ent of the perfect tracking task (2), desp ite the presence of nonrepetit iv e uncertainties. T o proceed, we aim at discussin g the in fluence o f nonrepetitive uncertaint i es o n the ILC process, for which the following helpful lemm a is give n t o identify the roles of nonrepetitive uncertainties in the extended dynamical linearization for the nonli n ear sys tem (1). 22 Lemma 9 . If th e Assumptio n (A1) is sati sfied fo r the nonl i near system (51), then an extended dynamical linearization fo r (51) can be given b y y i ( 1 ) y i ( 2 ) . . . y i ( T ) − y j ( 1 ) y j ( 2 ) . . . y j ( T ) = Θ i , j u i ( 0 ) u i ( 1 ) . . . u i ( T − 1 ) − u j ( 0 ) u j ( 1 ) . . . u j ( T − 1 ) + ϒ i , j w i ( 0 ) w i ( 1 ) . . . w i ( T − 1 ) − w j ( 0 ) w j ( 1 ) . . . w j ( T − 1 ) + ϑ i , j , 0 ϑ i , j , 1 . . . ϑ i , j , T − 1 δ i − δ j , ∀ i , j ∈ Z + (55) wher e Θ i , j is the same as defined in (7), ϒ i , j is some bo u nded lower triangula r mat r ix in the form of ϒ i , j = 1 0 · · · 0 υ i , j , 1 ( 0 ) 1 . . . . . . . . . . . . . . . 0 υ i , j , T − 1 ( 0 ) · · · υ i , j , T − 1 ( T − 2 ) 1 and ϑ i , j , t , ∀ t ∈ Z T − 1 is s ome boun d ed parameter . Further , bot h (8) and (9) hol d , and for the same bound β θ as d et erm i ned in (8), it simultaneous ly f ollows υ i , j , t ( ξ ) ≤ β θ , ∀ ξ ∈ Z t − 1 , ∀ t ∈ Z T − 1 , ∀ i , j ∈ Z + ϑ i , j , t ≤ β θ , ∀ t ∈ Z T − 1 , ∀ i , j ∈ Z + . (56) Pr oof. This lem m a can be obtained by taking the nonrepetitive uncertainties into account and following the similar way as the p roo f of Lemma 1. See Appendi x G for the proof details. From Lemma 9, it can be clearly foun d t hat the nonrepetitive uncertainties play an important role in influencing the dyn am ic ev olution o f ILC along the iteration axis. A specific appl i cation of this lemm a is to revea l the input-out put relatio n between two sequential iteratio n s, for which (10) correspondingly becomes ∆ y k ( t + 1 ) = t ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) + ∆ w k ( t ) + t − 1 ∑ i = 0 υ k , k − 1 , t ( i ) ∆ w k ( i ) + ϑ k , k − 1 , t ∆ δ k , ∀ t ∈ Z T − 1 , ∀ k ∈ Z . (57) 23 Though the effects of the non repetitiv e uncertainties need to be considered, it can be seen from (55) and (57) th at they play the role as additional inputs during the ILC process. Furthermore, such additional effec ts can be guaranteed to be bounded under the Assumption (A2). W ith t hese observations, we can further generalize the proposed results for opt i mization-based adaptive ILC to possess certain robustness wi th respect to nonrepetitiv e uncertainties, which is s hown in t he following theorem. Theor em 3 . Consider the nonli near system (51) satisf yin g the Assumptions (A1) an d (A2). If the Algor ithm 1 is app l ied under th e cond ition (41), then the fol lowing r esul ts can be developed for optimization-ba sed a daptive ILC: 1) the parameter estimation ˆ θ k , k − 1 , t ( i ) , ∀ i ∈ Z t , ∀ t ∈ Z T − 1 , ∀ k ∈ Z is bou n ded such that (21) and (22) hold f or so me finit e bound β ˆ θ > 0 ; 2) the input u k ( t ) , ∀ t ∈ Z T − 1 , ∀ k ∈ Z + and the output y k ( t ) , ∀ t ∈ Z T , ∀ k ∈ Z + ar e bou nded such that (42) holds for so me finite boun ds β u > 0 and β y > 0 ; 3) the r obust tracking obj ective (52) of ILC can be r ealiz ed; and further , th e perfect trac king objective (2) of ILC can be achiev ed, pro vided that (54) is add itionally ensur ed. Pr oof. 1): Note that Lemma 4, and consequently t he condit ion (30), still hol d. W it h Lemma 9, we can exploit (57) t o obtain | ∆ y k − 1 ( t + 1 ) | ≤ √ T β θ k ∆ − − → u k − 1 ( t ) k 2 + 2 β w + 2 T β θ β w + 2 β θ β δ by wh i ch we foll ow the same lines as (27) to further deriv e − − − − → ˆ θ k , k − 1 , t ( t ) 2 ≤ µ 1 µ 1 + µ 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) 2 + √ T β θ + β w + T β θ β w + β θ β δ √ µ 1 + µ 2 (58) where β w = max t ∈ Z T − 1 β w ( t ) . Based on (58), we can thus show the boundedness of the parameter estimation in the same way as the proof of T h eorem 1. 2) and 3): If (17) is com bined wit h (57), then the dynamics o f the tracking error can be described as e k ( t + 1 ) = e k − 1 ( t + 1 ) − ∆ y k ( t + 1 ) = " 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) # e k − 1 ( t + 1 ) − m ∑ i = 3 γ 1 γ i θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) e k − i + 1 ( t + 1 ) + e κ k ( t ) (59) 24 where e κ k ( t ) , in contrast t o κ k ( t ) in (20), is gi ven by e κ k ( t ) = γ 2 1 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) ∆ u k ( i ) − t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) − ∆ w k ( t ) − t − 1 ∑ i = 0 υ k , k − 1 , t ( i ) ∆ w k ( i ) − ϑ k , k − 1 , t ∆ δ k . (60) W ith (55), it can be verified t h at y k − 1 ( t + 1 ) = θ k − 1 , 0 , t ( t ) u k − 1 ( t ) + y 0 ( t + 1 ) + t − 1 ∑ i = 0 θ k − 1 , 0 , t ( i ) u k − 1 ( i ) − t ∑ i = 0 θ k − 1 , 0 , t ( i ) u 0 ( i ) + [ w k − 1 ( t ) − w 0 ( t )] + t − 1 ∑ i = 0 υ k − 1 , 0 , t ( i ) w k − 1 ( i ) − w 0 ( i ) + ϑ k − 1 , 0 , t ( δ k − 1 − δ 0 ) and then by ins erting this into (36), the dynam ics of the input can be described as u k ( t ) = " 1 − γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) # u k − 1 ( t ) + e ψ k ( t ) (61) where e ψ k ( t ) , in comparison with ψ k ( t ) in (39), is gi ven by e ψ k ( t ) = γ 1 ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ( ( γ 1 + γ 2 ) t ∑ i = 0 θ k − 1 , 0 , t ( i ) u 0 ( i ) − γ 1 + γ 2 t − 1 ∑ i = 0 θ k − 1 , 0 , t ( i ) u k − 1 ( i ) − γ 1 t − 1 ∑ i = 0 ˆ θ k , k − 1 , t ( i ) ∆ u k ( i ) + ( γ 1 + γ 2 ) e 0 ( t + 1 ) + m ∑ i = 3 γ i e k − i + 1 ( t + 1 ) − ( γ 1 + γ 2 ) w k − 1 ( t ) − w 0 ( t ) − ( γ 1 + γ 2 ) t − 1 ∑ i = 0 υ k − 1 , 0 , t ( i ) [ w k − 1 ( i ) − w 0 ( i )] − ( γ 1 + γ 2 ) ϑ k − 1 , 0 , t ( δ k − 1 − δ 0 ) ) . (62) Based o n (59), (60 ), (61), and (62) and wit h [33, Lemma 2], we can establ i sh the results for boundedness of system trajectories and for robust tracking of ILC by following the same steps as the proof of Theorem 2, which is thus omitt ed here. Remark 9. F r om Theor em 3, it can be seen that the Algorithm 1 of opt imization-ba s ed adap- tive ILC is n o t only applicabl e for addr essing unknown nonlinear t ime-varying dynamics but also effective in over coming ill effect o f nonr epetitive uncerta inties. This benefits fr om the optimizat i on-based design of Algorithm 1 and the used DD A appr oach for ILC. In addition, it is worth emph asizing that it is gener ally difficult to obta in r obustness of data-driven ILC in th e pr esence of no nr epetiti ve uncerta inties, see, e.g., [24]-[29]. By contrast, Theor em 3 successfully shows th e rob ust analysis o f data -driven ILC, in spite of nonr epeti tive uncertainti es arising f r om disturbances and ini tial shi f ts. 25 0 200 400 600 800 1000 Iteration num b er 0 1 2 3 4 5 6 7 8 max 0 ≤ t ≤ 50 | u k ( t ) | Fig. 1. Bound ed e volution of the input along the iteration axis. V I . S I M U L A T I O N T E S T S T o ill ustrate the ef fectiveness of the propo sed optimi zation-based adaptiv e ILC algorit h m, let the nonlinear s ystem (1) be giv en in a specific form o f y k ( t + 1 ) = sin ( y k ( t )) + cos ( y k ( t − 1 )) + t + 1 t + 2 u k ( t ) + cos ( y k ( t )) sin ( u k ( t − 1 )) where the initial ou tput is set as y 0 = 1 . 5 . The perfect tracking task (2) is considered with the desired reference t rajectory as y d ( t ) = 5 sin 2 π t 50 + 0 . 8 t ( 50 − t ) 300 , ∀ t ∈ Z 50 . T o implement t he A l gorithm 1, we adopt the parameters shown in T able I, and choose the initial estimated v alue ˆ θ 0 , − 1 , t ( i ) such that ˆ θ 0 , − 1 , t ( i ) = 0 . 9, ∀ i ∈ Z t , ∀ t ∈ Z T − 1 . T ABL E I P A R A M E T E R S U S E D I N A L G O R I T H M 1 λ γ 1 γ 2 γ 3 µ 1 µ 2 ε 1 0.8 0.14 0.06 1 0.001 0.01 It can be verified that the selection condition (41) is satis fied. In Fig. 1, the iteration ev olut ion of the input, in the sense of max t ∈ Z 50 | u k ( t ) | , is plott ed for the first 1000 iterations. It can be seen from Fig. 1 that th e i nput is bounded for all tim e steps and all iterations. T o d escrib e the output tracking performances, we depict the it eration e volution of the tracking error , in the sense of max t ∈ Z 49 | e k ( t + 1 ) | , for the first 1000 iteration s in Fig. 2. It is clear from this figure t hat the o u tput trackin g error con ver ges to zero along the iteration axis. 26 0 200 400 600 800 1000 Iteration num b er 0 1 2 3 4 5 6 max 1 ≤ t ≤ 50 | e k ( t ) | Fig. 2. Con verg ence of the tracking error along the iteration axis. 0 10 20 30 40 50 Time step -4 -2 0 2 4 6 8 Learned Output V.S. Desired Reference y d t ( k ) y 400 ( t ) Fig. 3. Output tracking performance of optimization-based adaptiv e ILC after 400 it erati ons. Because the desired reference y d ( t ) is bounded, Fig. 2 impl i es the boundedness o f the ou t put for all time steps and all iteratio n s. In additi on, Fig. 3 depicts the tracking performance of the system ou t put refined throu gh optim i zation-based adaptive ILC after 400 iterations versus the desired reference. It can be obvious ly revealed from Fig. 3 th at the perfect outpu t tracking task s can be achieved for nonlinear sy s tems in spit e of unknown nonlinear time-varying d y namics. Next, we demonst rate the robust performances of t he above-considered opti mization-based adaptiv e ILC by instead ai m ing at the non linear system (51). W ithout any l o ss of generality , we adopt the same settings of (1) for (51), except the non repeti t iv e uncertainties caused by the initi al shift δ k and the distu rbance w k ( t ) . Let the nonrepetit iv e un certainties be arbitrarily va rying wi th respect to it eration and ti me, for which we t ake β δ = 0 . 01 and β w = 0 . 01. Sim ilarly to Figs. 1-3, Fig. 4 depicts the system performances w h en applying the Al g o rithm 1 of opt imization-based 27 13 0 200 400 600 800 1000 Iteratio n number 0 1 2 3 4 5 6 7 8 max 0 ≤ t ≤ 5 0 | u k ( t ) | 0 200 400 600 800 1000 I t e r a t i o n n u m b e r m a x 5 0 0 10 20 30 40 50 T i m e s t e p -4 -2 L e a r n e d O u t p u t V . S . D e s i r e d R e f e r e n c e 4 0 0 4. Rob ust performances of optimization-based adapti v e ILC ag ainst nonrepetiti v e uncertainties. Left: boundedness of input. Middle: bounded con v er gence of the output tracking error . Right: tracking of the desired reference for output learned after 400 iterations. C K N O W L E D G E M E N T S w ould lik e to thank Professor Zhongsheng Hou, v ersity , China, for his helpful discussions on data- v en ILC of nonlinear systems. P P E N D I X R O O F O F E M M A we can deri v e − − − − → − − − − → − − → − − − − → − − → ) + − − − − → − − − − − − → − − − − → W e tak e − − − − → − − − − → ) = 0 and consequently , − − → − − → − − − − → − − → ) + − − − − − − → In addition, we can v erify − − → − − → − − → − − → − − → to − − − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → By noting that − − → − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → − − → − − − − − − → − − → − − → we can emplo y (64) to further obtain − − − − → ) = − − → − − → − − − − − − → − − → − − → − − → − − − − − − → − − − − − − → − − → − − → − − − − − − → − − → , (13) holds. P P E N D I X R O O F O F E M M A W e can easily see from (23) that − − → ) ) is a real symmetric matrix, and can thus obtain − − → ) ) − − → ) ) ) W e can also v erify that for − − → − − → , the eigen v alues − − → or 0 (with a multiplicity of ). By noting f act, we can further get from (23) that for − − → ) ) , the Limited circulation. For review only IEEE-T AC Submission no.: 19-1336.1 print submitted to IEEE T ransactions on Automatic Control. Received: August 6, 2019 20:19:24 PST 13 0 200 400 600 800 1000 I t e r a t i o n n u m b e r m a x 5 0 0 200 400 600 800 1000 Iteratio n number 0 1 2 3 4 5 6 max 1 ≤ t ≤ 5 0 | e k ( t ) | 0 10 20 30 40 50 T i m e s t e p -4 -2 L e a r n e d O u t p u t V . S . D e s i r e d R e f e r e n c e 4 0 0 4. Rob ust performances of optimization-based adapti v e ILC ag ainst nonrepetiti v e uncertainties. Left: boundedness of input. Middle: bounded con v er gence of the output tracking error . Right: tracking of the desired reference for output learned after 400 iterations. C K N O W L E D G E M E N T S w ould lik e to thank Professor Zhongsheng Hou, v ersity , China, for his helpful discussions on data- v en ILC of nonlinear systems. P P E N D I X R O O F O F E M M A we can deri v e − − − − → − − − − → − − → − − − − → − − → ) + − − − − → − − − − − − → − − − − → W e tak e − − − − → − − − − → ) = 0 and consequently , − − → − − → − − − − → − − → ) + − − − − − − → In addition, we can v erify − − → − − → − − → − − → − − → to − − − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → By noting that − − → − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → − − → − − − − − − → − − → − − → we can emplo y (64) to further obtain − − − − → ) = − − → − − → − − − − − − → − − → − − → − − → − − − − − − → − − − − − − → − − → − − → − − − − − − → − − → , (13) holds. P P E N D I X R O O F O F E M M A W e can easily see from (23) that − − → ) ) is a real symmetric matrix, and can thus obtain − − → ) ) − − → ) ) ) W e can also v erify that for − − → − − → , the eigen v alues − − → or 0 (with a multiplicity of ). By noting f act, we can further get from (23) that for − − → ) ) , the Limited circulation. For review only IEEE-T AC Submission no.: 19-1336.1 print submitted to IEEE T ransactions on Automatic Control. Received: August 6, 2019 20:19:24 PST 13 0 200 400 600 800 1000 I t e r a t i o n n u m b e r m a x 5 0 0 200 400 600 800 1000 I t e r a t i o n n u m b e r m a x 5 0 0 10 20 30 40 50 Time ste p -4 -2 0 2 4 6 8 Learned Output V.S. D esired Ref erence y d ( t ) y 400 ( t ) 4. Rob ust performances of optimization-based adapti v e ILC ag ainst nonrepetiti v e uncertainties. Left: boundedness of input. Middle: bounded con v er gence of the output tracking error . Right: tracking of the desired reference for output learned after 400 iterations. C K N O W L E D G E M E N T S w ould lik e to thank Professor Zhongsheng Hou, v ersity , China, for his helpful discussions on data- v en ILC of nonlinear systems. P P E N D I X R O O F O F E M M A we can deri v e − − − − → − − − − → − − → − − − − → − − → ) + − − − − → − − − − − − → − − − − → W e tak e − − − − → − − − − → ) = 0 and consequently , − − → − − → − − − − → − − → ) + − − − − − − → In addition, we can v erify − − → − − → − − → − − → − − → to − − − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → By noting that − − → − − → − − → − − → − − → − − → − − → − − → − − → − − − − − − → − − → − − − − − − → − − → − − → we can emplo y (64) to further obtain − − − − → ) = − − → − − → − − − − − − → − − → − − → − − → − − − − − − → − − − − − − → − − → − − → − − − − − − → − − → , (13) holds. P P E N D I X R O O F O F E M M A W e can easily see from (23) that − − → ) ) is a real symmetric matrix, and can thus obtain − − → ) ) − − → ) ) ) W e can also v erify that for − − → − − → , the eigen v alues − − → or 0 (with a multiplicity of ). By noting f act, we can further get from (23) that for − − → ) ) , the Limited circulation. For review only IEEE-T AC Submission no.: 19-1336.1 print submitted to IEEE T ransactions on Automatic Control. Received: August 6, 2019 20:19:24 PST Fig. 4. Robust performances of optimization-based adaptive IL C against nonrepetitiv e uncertainties. Left : boundedness of input. Middle: bounded con vergence of the output tracking error . Ri ght: tracking of the desired reference for output learned after 400 iterations. adaptiv e ILC to (51). Clearly , we can observe from Fig. 4 t h at the opti m ization-based adaptive ILC works robustly and effe ctiv ely , regardless of nonrepetitiv e uncertainties. Discussions: The simulation tests in Figs. 1-4 are consi stent w i th ou r est abl ished conv er gence results of optimization-based adaptive ILC in Theorems 1-3. This demonst rates the validity o f our proposed Algori t hm 1, especially the robustness against nonrepeti tiv e uncertainties. In addition, Figs. 1-4 il lustrate th at our design and analysis of optimization-based adaptiv e ILC not only generalize the relev ant existing results of, e.g., [26], [27] by prop o sing a new algorithm but also proceed further to make i m provements of them by particularly showing robustness with respect to n onrepetitive uncertainties. V I I . C O N C L U S I O N S In this p aper , the algorithm design and con ver gence analy sis of opt imization-based adapt ive ILC for nonl inear systems ha ve been d i scussed in spite of u n known time-varying uncertainties. A new design approach has been given to exploit optimization-based adaptiv e ILC, especially through presenting an im proved opt imization index to obtain an updating law for the parameter estimation. Simultaneously , a new analys i s approach has been proposed t o cope with con ver gence problems for optim ization-based adaptive ILC, which resorts to the DD A-based approach to ILC con vergence and takes advantage of the good p roperties of nonnegative matrices. It has been shown that our established results may proceed furth er with the data-dri ven ILC problems in vestigated in, e.g . , [24]-[30]. In addition, robust con ver gence probl em s of opti m ization-based adaptiv e ILC ha ve been sol ved in the presence of no nrepetitive un certaint ies, despite nonlinear systems subject to it eration-dependent dis turbances and initial shifts. Simulation results ha ve also been offered to demonstrate the effecti veness of our obt ained results for optim ization-based adaptiv e ILC. 28 A C K N OW L E D G E M E N T S This work was supported in part by the Natio nal Natural Science Foundation of China under grant 61873013 and in part by the Fundamental Research Funds for th e Central Universities under grant YWF-19-BJ-J-42. A P P E N D I X A P RO O F O F L E M M A 1 W e carry out an inductiv e analysis on t to prove thi s lemma, and separate the proof into two steps as fol l ows. Step a ): Let t = 0 . From (1), we can ob t ain y k ( 1 ) = f ( y 0 , 0 , · · · , 0 , u k ( 0 ) , 0 , · · · , 0 ) , g 0 ( y 0 , u k ( 0 )) with which we can verify ∂ g 0 ∂ y 0 = ∂ f ∂ x 1 ( y 0 , 0 , ··· , 0 , u k ( 0 ) , 0 , ··· , 0 ) , ∂ g 0 ∂ u k ( 0 ) = ∂ f ∂ x l + 2 ( y 0 , 0 , ··· , 0 , u k ( 0 ) , 0 , ··· , 0 ) . Based o n (4) and (5), we can thus o b tain ∂ g 0 ∂ y 0 ≤ β f , β θ ( 0 ) , ∂ g 0 ∂ u k ( 0 ) ∈ h β f , β f i . Step b): Let any N ∈ Z be given. For t = 0, 1, · · · , N − 1, we proceed with th e analysis of step a) to make a hypothesis that y k ( t + 1 ) = g t ( y 0 , u k ( 0 ) , · · · , u k ( t )) holds , and simultaneously , ∂ g t ∂ y 0 ≤ β θ ( t ) , ∂ g t ∂ u k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ u k ( t − 1 ) ≤ β θ ( t ) , ∂ g t ∂ u k ( t ) ∈ h β f , β f i hold for some finite bound β θ ( t ) > 0. Then we will prove th at t he s ame resul ts can also be dev el o ped for t = N . Let t = N , and then from (1), we can exploit the hypothesis made for t = 0, 1, · · · , N − 1 to deduce y k ( N + 1 ) = f ( y k ( N ) , · · · , y k ( N − l ) , u k ( N ) , · · · , u k ( N − n ) , N ) = f g N − 1 ( y 0 , u k ( 0 ) , · · · , u k ( N − 1 )) , · · · , g N − 1 − l ( y 0 , u k ( 0 ) , · · · , u k ( N − 1 − l )) , u k ( N ) , · · · , u k ( N − n ) , N , g N ( y 0 , u k ( 0 ) , · · · , u k ( N )) . 29 By following t h e d eri vation rules for the compound fun ct i ons, we consi d er g N and can ob tain ∂ g N ∂ y 0 = l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ y 0 ∂ g N ∂ u k ( 0 ) = l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ u k ( 0 ) . . . ∂ g N ∂ u k ( N − 1 ) = ∂ f ∂ g N − 1 ∂ g N − 1 ∂ u k ( N − 1 ) + ∂ f ∂ u k ( N − 1 ) ∂ g N ∂ u k ( N ) = ∂ f ∂ u k ( N ) . This, together wit h (4), (6) and the made hypo t hesis, leads to ∂ g N ∂ y 0 ≤ l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ y 0 ≤ β θ ( N ) ∂ g N ∂ u k ( 0 ) ≤ l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ u k ( 0 ) ≤ β θ ( N ) . . . ∂ g N ∂ u k ( N − 1 ) ≤ ∂ f ∂ g N − 1 ∂ g N − 1 ∂ u k ( N − 1 ) + ∂ f ∂ u k ( N − 1 ) ≤ β θ ( N ) ∂ g N ∂ u k ( N ) = ∂ f ∂ u k ( N ) ∈ h β f , β f i where we can take β θ ( N ) = ( l + 1 ) β f max t ∈ Z N − 1 β θ ( t ) + β f . By ind u ction with the above analysis of s t eps a) and b), we can conclude that for any t ∈ Z T − 1 and k ∈ Z + , y k ( t + 1 ) = g t ( y 0 , u k ( 0 ) , · · · , u k ( t )) with ∂ g t ∂ y 0 ≤ β θ ( t ) , ∂ g t ∂ u k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ u k ( t − 1 ) ≤ β θ ( t ) ∂ g t ∂ u k ( t ) ∈ h β f , β f i where g t : R × R × · · · × R | {z } t + 2 → R 30 is some continuousl y differentiable functio n , and β θ ( t ) > 0 is some finite bound. Let us write g t as g t ( z 1 , z 2 , · · · , z t + 2 ) , wh ere z i ∈ R , i = 1, 2, · · · , t + 2 denot es the i th independ ent variable of g t . Then by employing the differential mean value theorem, we can further ob tain y i ( t + 1 ) − y j ( t + 1 ) = ∂ g t ∂ z 1 , ∂ g t ∂ z 2 , · · · , ∂ g t ∂ z t + 2 ( z 1 , z 2 , ··· , z t + 2 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ t + 2 ) × y 0 u i ( 0 ) . . . u i ( t ) − y 0 u j ( 0 ) . . . u j ( t ) = ∂ g t ∂ z 2 , ∂ g t ∂ z 3 , · · · , ∂ g t ∂ z t + 2 ( z 1 , z 2 , ··· , z t + 2 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ t + 2 ) × u i ( 0 ) u i ( 1 ) . . . u i ( t ) − u j ( 0 ) u j ( 1 ) . . . u j ( t ) (63) where z ∗ 1 , z ∗ 2 , · · · , z ∗ t + 2 = ϖ ( y 0 , u i ( 0 ) , · · · , u i ( t )) + ( 1 − ϖ ) y 0 , u j ( 0 ) , · · · , u j ( t ) for some ϖ ∈ [ 0 , 1 ] . Clearly , we can rewrite (63) in the compact form of (7). Let β θ = max t ∈ Z T − 1 β θ ( t ) , and we can also deduce the boundedness results of Θ i , j in (8) and (9). A P P E N D I X B P RO O F O F L E M M A 2 By noting (18), we first reformulate (3) as J ( u k ( t )) = λ [ ∆ u k ( t )] 2 + ( γ 1 " − θ k , k − 1 , t ( t ) u k ( t ) + θ k , k − 1 , t ( t ) u k − 1 ( t ) + e k − 1 ( t + 1 ) − t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) # + m ∑ i = 2 γ i e k − i + 1 ( t + 1 ) ) 2 . (64) Then, to det erm i ne u k ( t ) that can optimize (3), it may generally resort t o the conditi on (see als o [26]-[28]) ∂ J ( u k ( t )) ∂ u k ( t ) = 0 (65) 31 for which we can benefit from (64) to deduce ∂ J ( u k ( t )) ∂ u k ( t ) = 2 λ [ u k ( t ) − u k − 1 ( t ))] − 2 γ 1 θ k , k − 1 , t ( t ) ( γ 1 − θ k , k − 1 , t ( t ) u k ( t ) + θ k , k − 1 , t ( t ) u k − 1 ( t ) + e k − 1 ( t + 1 ) − t − 1 ∑ i = 0 θ k , k − 1 , t ( i ) ∆ u k ( i ) + m ∑ i = 2 γ i e k − i + 1 ( t + 1 ) ) . (66) A straightforward consequence of inserti ng (66) in t o (65) is an o ptimal ILC law gained for t ∈ Z T − 1 and k ∈ Z in the updating form of (11). A P P E N D I X C P RO O F O F L E M M A 3 From (12), we can deriv e ∂ H − − − − → ˆ θ k , k − 1 , t ( t ) ∂ − − − − → ˆ θ k , k − 1 , t ( t ) = − 2 ∆ y k − 1 ( t + 1 ) − ∆ − − → u k − 1 T ( t ) − − − − → ˆ θ k , k − 1 , t ( t ) ∆ − − → u k − 1 ( t ) + 2 µ 1 − − − − → ˆ θ k , k − 1 , t ( t ) − − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) + 2 µ 2 − − − − → ˆ θ k , k − 1 , t ( t ) . W e take ∂ H − − − − → ˆ θ k , k − 1 , t ( t ) ∂ − − − − → ˆ θ k , k − 1 , t ( t ) = 0 and cons equently , can deduce µ 1 I + µ 2 I + ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) − − − − → ˆ θ k , k − 1 , t ( t ) = ∆ y k − 1 ( t + 1 ) ∆ − − → u k − 1 ( t ) + µ 1 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) . (67) In addition, we can verify µ 1 I + µ 2 I + ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) − 1 = 1 µ 1 + µ 2 " I − ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 # which, together with (67), leads to − − − − → ˆ θ k , k − 1 , t ( t ) = ∆ y k − 1 ( t + 1 ) µ 1 + µ 2 " I − ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 # ∆ − − → u k − 1 ( t ) + µ 1 µ 1 + µ 2 " I − ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 # − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) . (68) By noting that " I − ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 # ∆ − − → u k − 1 ( t ) = µ 1 + µ 2 µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ∆ − − → u k − 1 ( t ) and that ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) = ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ∆ − − → u k − 1 ( t ) 32 we can empl oy (68) to further ob t ain − − − − → ˆ θ k , k − 1 , t ( t ) = ∆ y k − 1 ( t + 1 ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ∆ − − → u k − 1 ( t ) + µ 1 µ 1 + µ 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) − µ 1 µ 1 + µ 2 ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) = µ 1 µ 1 + µ 2 − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) + 1 µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 ∆ y k − 1 ( t + 1 ) − µ 1 µ 1 + µ 2 ∆ − − → u k − 1 T ( t ) − − − − − − → ˆ θ k − 1 , k − 2 , t ( t ) ∆ − − → u k − 1 ( t ) namely , (13) holds. A P P E N D I X D P RO O F O F L E M M A 4 W e can easily see from (23) that Q ( ∆ − − → u k − 1 ( t )) ∈ R ( t + 1 ) × ( t + 1 ) is a real sym metric matrix, and can thus obt ain k Q ( ∆ − − → u k − 1 ( t )) k 2 = ρ ( Q ( ∆ − − → u k − 1 ( t ))) . (69) W e can also verify that for ∆ − − → u k − 1 ( t ) ∆ − − → u k − 1 T ( t ) , the eigen values are either k ∆ − − → u k − 1 ( t ) k 2 2 or 0 (with a multiplicity of t ). By noting this fact, we can further get from (23) that for Q ( ∆ − − → u k − 1 ( t )) , the eigen values are either ( µ 1 + µ 2 ) . µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 or 1 (with a multipl icity of t ) . As a direct consequence, we have ρ ( Q ( ∆ − − → u k − 1 ( t ))) = 1 , t > 0 µ 1 + µ 2 µ 1 + µ 2 + k ∆ − − → u k − 1 ( t ) k 2 2 , t = 0 , ∀ k ≥ 2 which, together with (69), yields k Q ( ∆ − − → u k − 1 ( t )) k 2 = ρ ( Q ( ∆ − − → u k − 1 ( t ))) ≤ 1 . Namely , Lemma 4 is d e veloped. A P P E N D I X E P RO O F O F L E M M A 6 T o prove Lemma 6, we exploit th e prop erties of nonnegativ e matrices to disclose t he relati on- ship between t he condit ion (35) in Lemma 6 and the conditi o n (C) in Lemma 5. Lemma 10. F or any t ∈ Z T − 1 , the con d ition (C) i n Lemma 5 ho lds a s a cons equence of the condition (35) in Lemma 6. 33 Pr oof. Let us take ω s ( t ) = ( m − 1 ) s + 1, ∀ t ∈ Z T − 1 in (34 ), and we can us e the properties of nonnegativ e matri ces to deduce ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 P k ( t ) ∞ ≤ ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | ∞ = ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 ∞ . (70) T o proceed with (70), we adopt an inductiv e analysi s approach t o show a property that if (35) holds, then ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 ≤ ζ 1 1 1 m − 1 . (71) Step 1 ): For i = 1, we consider ( m − 1 ) s + i ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 = P ( m − 1 ) s + 1 ( t ) 1 1 1 m − 1 and then by em ploying the definition of th e non n egati ve matrix P ( m − 1 ) s + 1 ( t ) , we can gain th at its induced nonn egati ve vector P ( m − 1 ) s + 1 ( t ) 1 1 1 m − 1 satisfies P ( m − 1 ) s + 1 ( t ) 1 1 1 m − 1 = m − 1 ∑ j = 1 p j , ( m − 1 ) s + 1 ( t ) 1 1 1 m − 2 ≤ " ζ 1 1 1 m − 2 # , " ζ 1 1 1 i 1 1 1 m − i − 1 # . (72) Step 2 ): For any i ≥ 1, we explore the fact (72) t o make the following hyp o thesis: ( m − 1 ) s + i ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 ≤ " ζ 1 1 1 i 1 1 1 m − i − 1 # . (73) Then for the next step i + 1, we ins ert (73) and can again apply the properties of non negati ve matrices t o deri ve ( m − 1 ) s + i + 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 = P ( m − 1 ) s + i + 1 ( t ) " ( m − 1 ) s + i ∏ l =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 # ≤ P ( m − 1 ) s + i + 1 ( t ) " ζ 1 1 1 i 1 1 1 m − i − 1 # 34 which, together with the definition of | P k ( t ) | and the condition (35), leads to ( m − 1 ) s + i + 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 ≤ ζ i ∑ j = 1 p j , ( m − 1 ) s + i + 1 ( t ) + m − 1 ∑ j = i + 1 p j , ( m − 1 ) s + i + 1 ( t ) ζ 1 1 1 i 1 1 1 m − i − 2 ≤ m − 1 ∑ j = 1 p j , ( m − 1 ) s + i + 1 ( t ) ζ 1 1 1 i 1 1 1 m − i − 2 ≤ " ζ 1 1 1 i + 1 1 1 1 m − i − 2 # . (74) Clearly , (74) implies that t he hypothesis made in (73) can also hold by updating i with i + 1. W ith the above analysi s of steps 1) and 2) and by i n duction, we can conclude t hat (71) holds. By combining (70) and (71), we can furt h er dedu ce ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 P k ( t ) ∞ ≤ ( m − 1 ) s + m − 1 ∏ k =( m − 1 ) s + 1 | P k ( t ) | 1 1 1 m − 1 ∞ ≤ k ζ 1 1 1 m − 1 k ∞ = ζ < 1 . (75) Consequently , (75 ) guarantees that the condi tion (C) in Lemma 5 can be deve loped by particularly setting ω s ( t ) = ( m − 1 ) s + 1, ∀ t ∈ Z T − 1 and η = ζ . In additio n, for the relationsh i p between (19) and (31), we clearly have two equiv alent resul t s in t he following l emma. Lemma 1 1. F or any t ∈ Z T − 1 , it fo llows: 1) − → e k ( t + 1 ) is bounded (r espectively , lim k → ∞ − → e k ( t + 1 ) = 0 if and only if e k ( t + 1 ) is bounded (r espectively , lim k → ∞ e k ( t + 1 ) = 0 ); 2) − → κ k ( t ) is bounded (r espectively , lim k → ∞ − → κ k ( t ) = 0 if and only if κ k ( t ) is bounded (r espec- tively , li m k → ∞ κ k ( t ) = 0 ). Pr oof. A consequence of the definiti ons for − → e k ( t + 1 ) and − → κ k ( t ) in (32). W ith Lemmas 10 and 11, we can prove Lemma 6 as follows. 35 Pr oof of Lemma 6. Based on Lemmas 5 and 1 0, we know that if the condition (35) ho l ds, then lim k → ∞ − → e k ( t + 1 ) = 0, provided that lim k → ∞ − → κ k ( t ) = 0. By the two equiv alent results of Lemma 11, we can further conclude l i m k → ∞ e k ( t + 1 ) = 0, provided that li m k → ∞ κ k ( t ) = 0. In the same way , we can prove that e k ( t + 1 ) is bound ed, provided that κ k ( t ) is bounded. Namely , Lemm a 6 is o btained. A P P E N D I X F P RO O F O F L E M M A 8 W ith Lemma 1 and Theorem 1, we can o b tain ˆ θ 2 k , k − 1 , t ( t ) ≤ β 2 ˆ θ , β f ε ≤ θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) , γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ γ 2 1 + γ 1 γ 2 β f β ˆ θ λ (76) which, together with (41), leads to γ 1 γ 1 + γ 2 − m ∑ i = 3 γ i ! β f ε λ + γ 2 1 β 2 ˆ θ ≤ γ 2 1 + γ 1 γ 2 β f β ˆ θ λ < 1 . (77) By inserting (7 6) and (77) into (35), we can verify 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) + m ∑ i = 3 γ 1 γ i θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) = 1 − γ 2 1 + γ 1 γ 2 θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) + m ∑ i = 3 γ 1 γ i θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) = 1 − γ 1 γ 1 + γ 2 − m ∑ i = 3 γ i ! θ k , k − 1 , t ( t ) ˆ θ k , k − 1 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ 1 − γ 1 γ 1 + γ 2 − m ∑ i = 3 γ i ! β f ε λ + γ 2 1 β 2 ˆ θ , ζ < 1 , ∀ t ∈ Z T − 1 , ∀ k ∈ Z that i s, the condi tion (35) holds. In the same way as (76), we can apply (9) and (22) to deriv e β f ε ≤ ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) ≤ β f β ˆ θ 36 and further by (41), we can deduce γ 2 1 + γ 1 γ 2 β f ε λ + γ 2 1 β 2 ˆ θ ≤ γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ γ 2 1 + γ 1 γ 2 β f β ˆ θ λ < 1 which, together with (40), results in 1 − γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) = 1 − γ 2 1 + γ 1 γ 2 ˆ θ k , k − 1 , t ( t ) θ k − 1 , 0 , t ( t ) λ + γ 2 1 ˆ θ 2 k , k − 1 , t ( t ) ≤ 1 − γ 2 1 + γ 1 γ 2 β f ε λ + γ 2 1 β 2 ˆ θ , φ < 1 , ∀ t ∈ Z T − 1 , ∀ k ∈ Z . Namely , the condition (40) hol ds. A P P E N D I X G P RO O F O F L E M M A 9 Similarly to the proof of Lem ma 1, an i n ductiv e analysis on t is performed to prove th is lemma, and the proof is separated i nto t wo st eps as follows. Step a ): Let t = 0 . Then the use of (51 ) gives y k ( 1 ) = f ( y k ( 0 ) , 0 , · · · , 0 , u k ( 0 ) , 0 , · · · , 0 ) + w k ( 0 ) , g 0 ( y k ( 0 ) , u k ( 0 ) , w k ( 0 )) based on whi ch we have ∂ g 0 ∂ y k ( 0 ) = ∂ f ∂ x 1 ( y k ( 0 ) , 0 , ··· , 0 , u k ( 0 ) , 0 , ··· , 0 ) ∂ g 0 ∂ u k ( 0 ) = ∂ f ∂ x l + 2 ( y k ( 0 ) , 0 , ··· , 0 , u k ( 0 ) , 0 , ··· , 0 ) ∂ g 0 ∂ w k ( 0 ) = 1 . By employing (4) and (5), w e can further deriv e ∂ g 0 ∂ y k ( 0 ) ≤ β f , β θ ( 0 ) , ∂ g 0 ∂ u k ( 0 ) ∈ h β f , β f i , ∂ g 0 ∂ w k ( 0 ) = 1 . 37 Step b): Let us consider a ny N ∈ Z . For t = 0, 1, · · · , N − 1, we assume y k ( t + 1 ) = g t ( y 0 , u k ( 0 ) , · · · , u k ( t ) , w k ( 0 ) , · · · , w k ( t )) and simultaneousl y that i t satisfies ∂ g t ∂ y k ( 0 ) ≤ β θ ( t ) , ∂ g t ∂ u k ( t ) ∈ h β f , β f i , ∂ g t ∂ w k ( t ) = 1 ∂ g t ∂ u k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ u k ( t − 1 ) ≤ β θ ( t ) , ∂ g t ∂ w k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ w k ( t − 1 ) ≤ β θ ( t ) for s o me finite bound β θ ( t ) > 0. Next, we show that for t = N , we can d edu ce the same results. When we consid er (51) for t = N , the use of th e h y pothesis made for t = 0, 1, · · · , N − 1 leads to y k ( N + 1 ) = f ( y k ( N ) , · · · , y k ( N − l ) , u k ( N ) , · · · , u k ( N − n ) , N ) + w k ( N ) = f g N − 1 , · · · , g N − 1 − l , u k ( N ) , · · · , u k ( N − n ) , N + w k ( N ) , g N ( y k ( 0 ) , u k ( 0 ) , · · · , u k ( N ) , w k ( 0 ) , · · · , w k ( N )) . For g N , we em ploy the deriv ation rules of compound functions to deduce ∂ g N ∂ y k ( 0 ) = l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ y k ( 0 ) ∂ g N ∂ u k ( 0 ) = l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ u k ( 0 ) . . . ∂ g N ∂ u k ( N − 1 ) = ∂ f ∂ g N − 1 ∂ g N − 1 ∂ u k ( N − 1 ) + ∂ f ∂ u k ( N − 1 ) ∂ g N ∂ u k ( N ) = ∂ f ∂ u k ( N ) and ∂ g N ∂ w k ( 0 ) = l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ w k ( 0 ) . . . ∂ g N ∂ w k ( N − 1 ) = ∂ f ∂ g N − 1 ∂ g N − 1 ∂ w k ( N − 1 ) ∂ g N ∂ w k ( N ) = 1 . 38 Again w i th t he made hypoth esis and by inserting (4) and (6), we can obtain ∂ g N ∂ y k ( 0 ) ≤ l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ y k ( 0 ) ≤ β θ ( N ) ∂ g N ∂ u k ( 0 ) ≤ l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ u k ( 0 ) ≤ β θ ( N ) . . . ∂ g N ∂ u k ( N − 1 ) ≤ ∂ f ∂ g N − 1 ∂ g N − 1 ∂ u k ( N − 1 ) + ∂ f ∂ u k ( N − 1 ) ≤ β θ ( N ) ∂ g N ∂ u k ( N ) = ∂ f ∂ u k ( N ) ∈ h β f , β f i and ∂ g N ∂ w k ( 0 ) ≤ l ∑ i = 0 ∂ f ∂ g N − 1 − i ∂ g N − 1 − i ∂ w k ( 0 ) ≤ β θ ( N ) . . . ∂ g N ∂ w k ( N − 1 ) ≤ ∂ f ∂ g N − 1 ∂ g N − 1 ∂ w k ( N − 1 ) ≤ β θ ( N ) ∂ g N ∂ w k ( N ) = 1 where β θ ( N ) = ( l + 1 ) β f max t ∈ Z N − 1 β θ ( t ) + β f can be adopt ed as a candidate. Based on the analysis of the above st eps a) and b), w e can conclude by inductio n that for any t ∈ Z T − 1 and k ∈ Z + , y k ( t + 1 ) = g t ( y k ( 0 ) , u k ( 0 ) , · · · , u k ( t ) , w k ( 0 ) , · · · , w k ( t )) with ∂ g t ∂ y k ( 0 ) ≤ β θ ( t ) , ∂ g t ∂ u k ( t ) ∈ h β f , β f i , ∂ g t ∂ w k ( t ) = 1 ∂ g t ∂ u k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ u k ( t − 1 ) ≤ β θ ( t ) , ∂ g t ∂ w k ( 0 ) ≤ β θ ( t ) , · · · , ∂ g t ∂ w k ( t − 1 ) ≤ β θ ( t ) where g t is s ome continuously differentiable functio n such that g t : R × R × · · · × R | {z } 2 t + 3 → R 39 and β θ ( t ) > 0 is some finite bound. For con venience, we writ e g t in terms of g t ( z 1 , z 2 , · · · , z 2 t + 3 ) , where z i ∈ R , i = 1, 2, · · · , 2 t + 3 represents the i th independent variable of g t . Then based on the use of the mean v alue theorem (see, e.g., [36, P . 651]), we can v alidate y i ( t + 1 ) − y j ( t + 1 ) = ∂ g t ∂ z 1 , ∂ g t ∂ z 2 , · · · , ∂ g t ∂ z 2 t + 3 ( z 1 , z 2 , ··· , z 2 t + 3 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ 2 t + 3 ) × y i ( 0 ) u i ( 0 ) . . . u i ( t ) w i ( 0 ) . . . w i ( t ) − y j ( 0 ) u j ( 0 ) . . . u j ( t ) w j ( 0 ) . . . w j ( t ) = ∂ g t ∂ z 2 , ∂ g t ∂ z 3 , · · · , ∂ g t ∂ z t + 2 ( z 1 , z 2 , ··· , z 2 t + 3 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ 2 t + 3 ) × u i ( 0 ) u i ( 1 ) . . . u i ( t ) − u j ( 0 ) u j ( 1 ) . . . u j ( t ) + ∂ g t ∂ z t + 3 , ∂ g t ∂ z t + 4 , · · · , ∂ g t ∂ z 2 t + 3 ( z 1 , z 2 , ··· , z 2 t + 3 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ 2 t + 3 ) × w i ( 0 ) w i ( 1 ) . . . w i ( t ) − w j ( 0 ) w j ( 1 ) . . . w j ( t ) + ∂ g t ∂ z 1 ( z 1 , z 2 , ··· , z 2 t + 3 )= ( z ∗ 1 , z ∗ 2 , ··· , z ∗ 2 t + 3 ) ( δ j − δ j ) (78) where z ∗ 1 , z ∗ 2 , · · · , z ∗ 2 t + 3 = ϖ ( y i ( 0 ) , u i ( 0 ) , · · · , u i ( t ) , w i ( 0 ) , · · · , w i ( t )) + ( 1 − ϖ ) y j ( 0 ) , u j ( 0 ) , · · · , u j ( t ) , w j ( 0 ) , · · · , w j ( t ) for s ome ϖ ∈ [ 0 , 1 ] . Clearly , (78) can be re written i n a compact form of (55). Moreover , by setting β θ = max t ∈ Z T − 1 β θ ( t ) , the b oundedness results of (8), (9) and (56) can also be obtained. 40 R E F E R E N C E S [1] S. Arimoto, S. Kawamura, and F . Miyazaki, “Bettering operation of robots by learning, ” J ournal of Robotic Systems , vo l. 1, no. 2, pp. 123–140, Apr . 1984. [2] Z. Hou, R. Chi, and H. Gao, “ An overvie w of dynamic-linearization -based data-driv en control and applications, ” IEEE T ransactions on Industrial Electr onics , vol. 64, no. 5, pp. 4076–409 0, May 2017. [3] D. A. Bristow , M. Tharayil, and A. G. Alleyne, “ A survey of it erative learning control: A l earning-based method for high-performanc e tracking control, ” IEEE Contr ol Systems Magazine , vol. 26, no. 3, pp. 96–114, Jun. 2006. [4] H.-S. Ahn, Y . Chen, and K. L. Moore, “Iterativ e learning control: Brief survey and categorization, ” IEE E T ransa ctions on Systems, Man, and Cybernetics, P art C: Applications and R evie ws , vol. 37, no. 6, pp. 1099–112 1, Nov . 2007. [5] J.-X. Xu, “ A surve y on iterative learning control f or nonlinear systems, ” International Jo urnal of Contr ol , vol. 84, no. 7, pp. 1275–1294, Jul. 2011. [6] D. S hen and Y . W ang, “Survey on stochastic iterativ e learning control, ” Journal of Pro cess Contr ol , vol. 24, no. 12, pp. 64–77, Dec. 2014. [7] N. Amann, D. H. Owens, and E. Rogers, “Iterative learning control for discrete-time systems with exponential r at e of con vergen ce, ” IEE Proceed ings–Contr ol Theory and Applications , vol. 143, no. 2, pp. 217–224, Mar . 1996. [8] Y . Chen and K. L . Moore, “ An optimal design of PD-type iterative learning control with monotonic con vergence, ” in Pr oceedings of the IEEE Internatinal Symposium on Intelligent Contr ol , V ancouver , Canada, pp. 55–60 , Oct. 27-30, 2002. [9] J.-X. Xu and Y . T an, “Robust optimal design and conv ergence properties analysis of iterative learning control approaches, ” Automatica , vo l. 38, no. 11, pp. 1867–1 880, Nov . 2002. [10] S. Y ang, J.-X. Xu, D. Huang, and Y . T an, “Optimal iterative learning control design for multi-agent systems consensus tracking, ” Systems and Contr ol Letters , vol. 69, pp. 80–89, Jul. 2014. [11] K. L . Barton and A. G. Alleyne, “ A norm optimal approach t o time-varying ILC with application to a multi-axis robotic testbed, ” IEEE Tr ansactions on Contr ol Systems T echn ology , vol. 19, no. 1, pp. 166–180, Jan. 2011. [12] D. H. Owens, C. T . Freeman, and B . Chu, “ An inv erse-model approach to multiv ariable norm optimal iterativ e learning control with auxiliary optimisation, ” International Journal of Control , vo l. 87, no. 8, pp. 1646–16 71, Aug. 2014. [13] M. V olckaert, M. Diehl, and J. S we vers, “Generalization of norm optimal ILC for nonlinear systems with constraints, ” Mecha nical Systems and Signal Pr ocessing , vol. 39, nos. 1-2, pp. 280–296, Aug.-Sept. 2013. [14] P . Janssens, G. P i peleers, and J. Sw evers, “ A data-driv en constrained norm-optimal iterativ e learning control framew ork for L TI systems, ” IEEE T ransa ctions on Contr ol Systems T echno logy , vol. 21, no. 2, pp. 546–551, Mar . 2013. [15] T . D. Son, G. Pipeleers, and J. Swevers, “Rob ust monotonic con ver gent iterative l earning control, ” IEEE T ransactions on Automatic Contr ol , vol. 61, no. 4, pp. 1063–10 68, Apr . 2016. [16] X. Ge, J. L . Stein, and T . Ersal, “Frequenc y-domain analysis of robust monotonic con ver gence of norm-optimal iterative learning control, ” IE EE T ransactions on Control Systems T ec hnolog y , vol. 26, no. 2, pp. 637–651, Mar . 2018. [17] A. Haber , R. F r aanje, and M. V erhaegen , “Linear computational complexity robust ILC for l ifted systems, ” Automatica , vol. 48, no. 6, pp. 1102–111 0, Jun. 2012. [18] H. S un and A. G. All eyn e, “ A computationally efficient norm optimal i t erativ e learning control approach for L T V systems, ” Automatica , vo l. 50, pp. 141–148, Jan. 2014. [19] P . Axelsson, R. Karlsson, and M. Norrl ¨ of, “Estimation-based norm-optimal iterativ e learning control, ” Systems and Contr ol Letters , vol. 73, pp. 76–80, Nov . 2014. [20] S. S. S aab, “ A discrete-time stochastic learning control algorithm, ” IEEE T ransac tions on Automatic Contr ol , vol. 46, no. 6, pp. 877–887, Jun. 2001. [21] S. S. Saab, “On a discrete-time stochastic learning control algorithm, ” IEEE Tr ansactions on Automatic Contr ol , vol. 46, no. 8, pp. 1333–1336 , Aug. 2001. [22] S. S. Saab, “Optimality of first -order ILC among higher order IL C , ” IEEE T ransactions on Automatic Control , vol. 51, no. 8, pp. 1332–1336 , Aug. 2006. 41 [23] J. K. Rice and M. V erhaegen , “ A str uctured matrix approach t o efficient calculation of LQG repetitive learning controllers in the l ifted setting, ” International Journa l of Contr ol , vol. 83, no. 6, pp. 1265–12 76, Jun. 2010. [24] R.-H. Chi and Z.-S. Hou, “Dual-stage optimal iterative learning control for nonlinear non-affine discrete-time systems, ” Acta Automatica Sinica , vol. 33, no. 10, pp. 1061–1065, Oct. 2007. [25] Z. Hou and S. Ji n, Model F r ee Adaptive Contr ol: Theory and Applications . Boca Raton: CRC Pr ess, 2013. [26] R. Chi, Z. Hou, B. Huang, and S . Jin, “ A unified data-driv en design frame work of optimality-based generalized i t erativ e learning control, ” C omputers and Chemical Engineering , vol. 77, pp. 10–23, Jun. 2015. [27] R. Chi, Z. Hou, S. Jin and B. Huang, “Computationally ef ficient data-dri ven higher order optimal iterativ e learning control, ” IEEE T rans actions on Neural Networks and L earning Systems , vol. 29, no. 12, pp. 5971–5980 , Dec. 2018. [28] R. Chi, B. Huang, Z. Hou and S. Jin, “Data-driv en high-order terminal iterativ e learning control with a faster con vergence speed, ” International Journal Robust and Nonlinear Contro l , vol. 28, no. 1, pp. 103–11 9, Jan. 2018. [29] X. Bu, Q. Y u, Z. Hou, and W . Qian, “Model free adapti ve iterative learning consensus tracking control for a class of nonlinear multiagent systems, ” IEEE Tr ansactions on Systems, Man, and Cybernetics: Systems , vol. 49, no. 4, pp. 677– 686, Apr . 2019. [30] Y . Hui, R. Chi, B. Huang, and Z. Hou, “Extended state observ er-based data-driv en iterativ e learning control for permanent magnet linear motor with initial shifts and disturbance s, ” IE EE T ransactions on Systems, Man, and Cybernetics: Systems , to be published, doi: 10.1109/TSMC.2019.29073 79. [31] W . J. Rugh, Linear System Theory . Upper Saddle Riv er , NJ: Pr ientice Hall, 1996. [32] D. Meng, Y . Jia, and J. Du, “Stability of v arying two-dimensio nal roesser systems and its application to i terativ e learning control con vergence analysis, ” IET Contr ol Theory and Applications , vol. 9, no. 8, pp. 1221-1228, May 2015. [33] D. Meng and K. L. Moore, “Robust iterative learning control for nonrepetiti ve uncertain systems, ” IEEE T ransa ctions on Automatic Contr ol , vol. 62, no. 2, pp. 907-913, Feb. 2017 . [34] D. Meng and J. Zhang, “Robu st tracking of nonrepetitiv e learning control systems with iteration-dependen t references, ” IEEE T rans actions on Systems, Man, and Cybernetics: Systems , t o be published, DOI: 10.1109/TSMC.2018.28 83383. [35] M. Y u, D. Huang, and W . He, “Robust adaptiv e it erative learning control for discrete-time nonlinear systems with both parametric and nonparametric uncertainties, ” International J ournal of Adaptive Control and Signal Pro cessing , vol. 30, no. 7, pp. 972–985, Jul. 2016. [36] H. K. Khalil, Nonlinear Systems . Upper Saddle Riv er , New Jersey: Prientice Hall, 2002. [37] R. A. Horn and C. R. Johnson, Matrix Analysis . Cambridge: Cambridge Univ ersi ty Press, 1985.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment