Discriminative Learning-based Smartphone Indoor Localization
Due to the growing area of ubiquitous mobile applications, indoor localization of smartphones has become an interesting research topic. Most of the current indoor localization systems rely on intensive site survey to achieve high accuracy. In this wo…
Authors: Jose Luis V. Carrera, Zhongliang Zhao, Torsten Braun
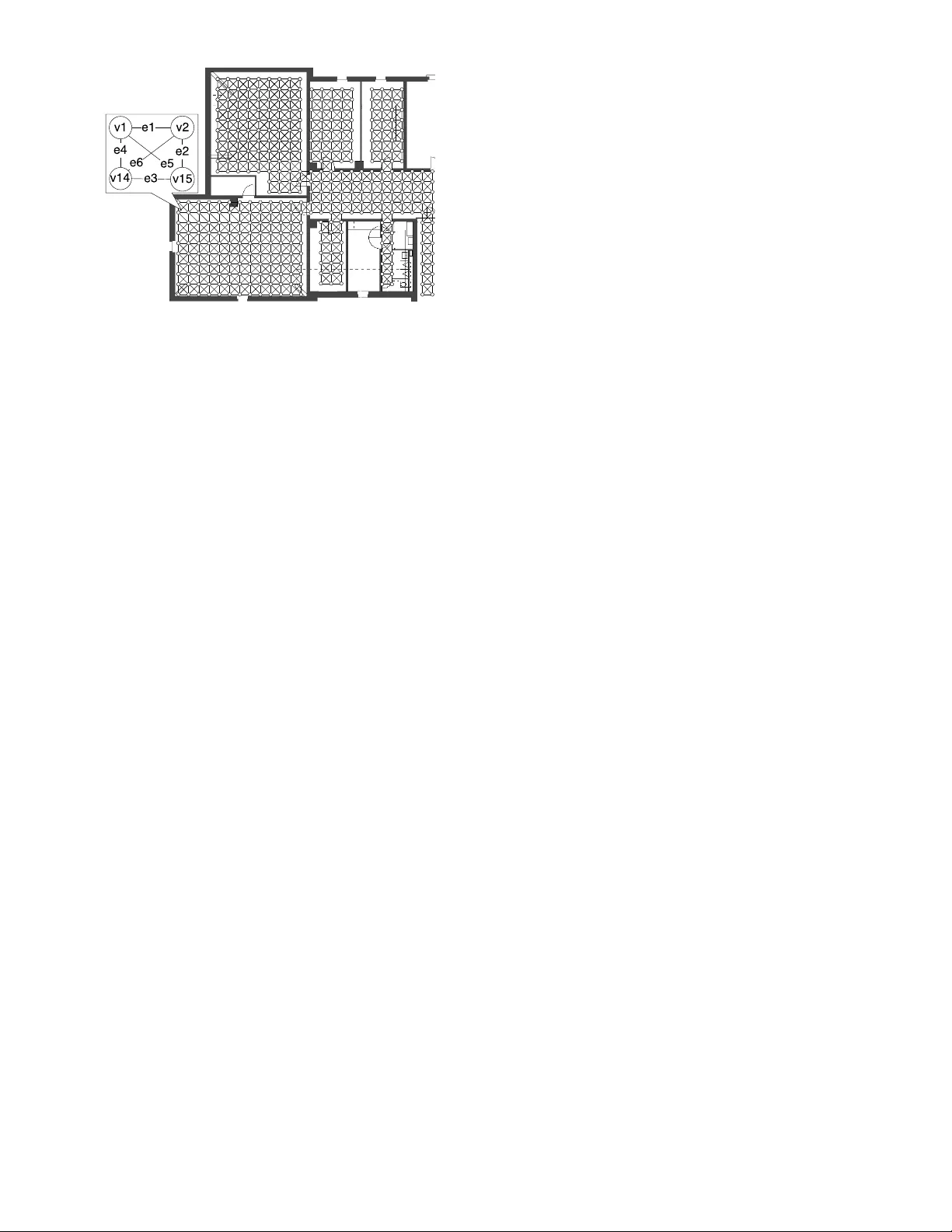
SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 1 Discr iminativ e Lear ning-based Smar tphone Indoor Localization Jos ´ e Luis Carrera V ., Member , IEEE, Zhongliang Zhao , Member , IEEE, T orsten Braun, Member , IEEE Haiyong Luo , Member , IEEE, F ang Zhao Abstract —Due to the growing area of ubiquitous mobile applications , indoor localization of smar tphones has become an interesting research topic. Most of the current indoor localization systems rely on intensive site surve y to achie ve high accur acy . In this w ork, we propose an efficient smar tphones indoor localization system that is able to reduce the site surve y eff or t while still achie ving high localization accuracy . Our system is built b y fusing a variety of signals, such as Wi-Fi receiv ed signal strength indicator, magnetic field and floor plan information in an enhanced par ticle filter . T o achiev e high and stable performance, we first apply discriminativ e learning models to integrate Wi-Fi and magnetic field readings to achie ve room lev el landmar k detection. Further, we integ rate landmark detection, range-based localization models, with a g raph-based discretized system state representation. Because our approach requires only discriminative learning-based room lev el landmark detections, the time spent in the learning phase is significantly reduced compared to traditional Wi-Fi fingerpr inting or landmark-based approaches. W e conduct e xperimental studies to ev aluate our system in an office-like indoor en vironment. Experiment results show that our system can significantly reduce the learning efforts, and the localization method can achiev e performance with an aver age localization error of 1.55 meters. Index T erms —Discriminative learning, likelihood estimation, par ticle filter , indoor localization, landmar k detection. F 1 I N T R O D U C T I O N N O wadays, location information has become a transcen- dent part of the daily life of mobile users. The gr owing area of ubiquitous computing technology has increased the demand of location-based services. The main goal of indoor localization is to supply to a mobile device a mechanism to locate itself and provide this information to users. However , contrary to Global Positioning System (GPS) for outdoor environments, currently there is not a simple and accurate solution for indoor localization. T ypically , indoor position- based services requir e higher localization accuracy than outdoor services. Additionally , the often limited compu- tation and power resour ces on mobile devices put strong constraints on the algorithmic complexity design of solu- tions. Thus, indoor localization is still considered an open challenging pr oblem. W ith the availability of more embedded sensors on mobile devices, numer ous indoor localization techniques (i.e, ultrasonic, radio frequency tags (RFID), magnetic field, W i-Fi, Bluetooth, etc.) have been proposed in recent years. However , due to the wide availability of W i-Fi signals in indoor environments, W i-Fi radio-based localization has attracted most attention among differ ent localization ap- proaches. W i-Fi radio-based localization r elies on measur ed radio parameters, such as signal power to estimate the absolute positioning of targets [2]. W i-Fi received signal strength indicator (RSSI) is the most widely used parameter • J. Carrera, Z. Zhao, and T . Braun are with the Institute of Computer Science, University of Bern, Switzerland; H. Luo is with the Institute of Computing T echnology , Chinese Academy of Science, China; F . Zhao is with the School of Software Engineering, Beijing University of Post and T elecommunications, China. • Corresponding author: Z. Zhao (zhao@inf.unibe.ch) for indoor localization. Radio-based indoor localization can be classified as range-based and range-free methods. Range is defined as the propagation distance from the target to Anchor Nodes (ANs). Fingerprinting is a range-free approach, which is often used because of its robustness to multi-path propaga- tion. In W i-Fi fingerprinting techniques, a training or learn- ing phase is needed to build the RSSI signatur e database of f- line. In the positioning or on-line phase, the tar get location is estimated according to the results of comparing RSSI readings and the signature database. Indoor envir onments pr ovide many dif ferent ambient ra- dio signals, such as W i-Fi, Bluetooth, magnetic field, sound, etc [10]. The set of observed ambient radio signals provides unique radio signal signatures for many points in indoor environments. These radio signal signatures can be used as landmarks to detect unique locations in the environment. Thus, the radio signal signatures are often used as the fin- gerprint of the related location. However , building the fin- gerprinting database of radio signals is a labor -intensive and time-consuming task. Moreover , the fingerprint database is prone to environment changes. This means whenever there is a modification of the physical indoor envir onment, the previous database will be outdated, and a new one has to be built. Therefor e, the traditional fingerprinting approach is not suitable for lar ge-scale scenarios. Some localization methods have been pr oposed considering magnetic field measurements. By using some advanced data fusion mech- anisms (i.e., particle filters), some works propose to use magnetic field r eadings as alternative [11] or as complement to W i-Fi signatures [26] to further improve the positioning accuracy . However , due to the intrinsic disturbances caused by electrical appliances and building materials, the change of the magnetic field with location is quite significant in SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 2 indoor environments. Moreover , magnetic field fingerprints can not be unique, which yields to localization errors. Indoor localization can be seen as a likelihood estima- tion problem. Ther eby , locating a target is the problem of estimating the location of a target given a set of available ob- servations [16]. T o achieve high accuracy , Kalman filters or particle filters are often used to fuse this set of observations to derive accurate localization estimations. However , filter- based data fusion normally requires intensive computation resour ces, which makes the real-time localization a challeng- ing task for smartphones with limited resources. Therefor e, optimization of the data fusion algorithm is key for efficient smartphone indoor localization systems. In this work, we propose a discriminative learning-based smartphone indoor localization system aiming at reducing the site survey efforts while attaining high localization ac- curacy . Our appr oach provides localization by fusing W i- Fi radio readings, magnetic field readings and floor plan information in an enhanced particle filter . Our approach is able to exploit historical environmental information from a learning phase as well as on-line information to provide high and stable localization accuracy . Our approach inte- grates discriminative learning-based landmark detection, range-based localization models, and a graph-based floor plan representation in an enhanced particle filter . Moreover , since our localization method exploits landmark detection with room level accuracy , we r educe the effort and time in building the learning phase compared to traditional fingerprinting-based and landmark-based localization ap- proaches. Our landmark fingerprint database is built by taking W i-Fi and magnetic field measurements while walk- ing randomly through the envir onment, which requires only room labeled samples in a very short time period. W e pr ototype our appr oach on commodity smartphones, with all the localization algorithms run on the smartphone itself. T o validate our localization system, we conduct ex- tensive experiments in a complex office-like envir onment. Evaluation results show that our approach can achieve an average localization error of 1 . 55 m with standard deviation of 0 . 73 m with significantly reduced site survey efforts, which makes it suitable for large-scale deployments. The main contributions of this work are as follows. • W e propose an efficient indoor localization system for smartphones that is able to significantly reduce the site survey effort while still achieving high lo- calization accuracy . Since our approach r equires only room level landmark detection (i.e., room recogni- tion), the landmark fingerprint database is built by collecting W i-Fi and magnetic field measurements by simply walking randomly through the envir on- ment. Thus, we reduce cost, manpower , effort, com- plexity and survey time in building the learning phase compared to traditional fingerprinting-based and landmark-based localization approaches. • W e propose an enhanced particle filter to integrate machine learning-based landmark detections, range- based localization models and a graph-based floor plan representation to pr ovide highly accurate and stable localization results. Our approach is able to fuse historical envir onmental information from a learning phase and perform on-line localization with stable localization accuracy . • W e perform a set of experiments and analysis to validate the performance of our localization method. Several configuration parameters, such as the num- ber of particles as well as the number and position of W i-Fi access points are tested to show that our system can significantly reduce the site survey ef forts while preserving high accuracy . The rest of the paper is organized as follows. In Section II we present some related work. The localization approach is reviewed in Section III. Section IV presents the implemen- tation of the terminal-based system and the experiments’ setup. Section V presents the performance evaluation results of our approach. Section VI concludes the paper . 2 R E L AT E D W O R K The current commercial and social importance of indoor location-based applications has attracted significant atten- tion in r ecent years. Indeed, indoor localization has been investigated lately and many solutions have been presented. Radio frequency (RF) based approaches include technolo- gies such as GPS, wireless local area networks (WLAN) and RFID localization. Non-RF-based solutions include laser , au- dio, visual, ultrasonic and infrar ed sensors [8]. In [13], a non- RF-based localization approach is pr oposed. This solution estimates the user location based on surveillance cameras. Any wearable device is needed by the user . However , the calibration process for the system becomes complex. In [15] the localization system is deployed using special infrastruc- tures such as infrar ed and acoustic sensors. Despite the fact that the localization system can achieve high accuracy , building these kinds of infrastructure is very costly . Due to the high vulnerability to envir onmental disruptions, most of the non-RF-based localization approaches require demand- ing calibration processes [8]. Among RF-based indoor localization approaches, trilat- eration has been regarded as a popular solution [22] [23]. T rilateration determines the position of the target based on the distances to some anchor nodes. However , unlike outdoor localization, trilateration does not work well in indoor environments because of the presence of obstacles and room partitions [9]. Therefore, as an alternative to trilateration, the process of signal collection and association with indoor locations has become a promising approach for indoor environments. This process is called fingerprinting. Fingerprinting approaches ar e conducted in two phases: the learning phase is performed off-line and the query phase that is executed on-line. The off-line phase is conducted to build or update a < signature, location > database, which consists of a set of refer ence points with known coordinates and the signatur es collected fr om available sensors. Then, the on-line phase is aimed to find the closest match between the features of the measured signatur es and those stored in the database. [7]. RADAR [24] was the first work that utilized W i-Fi fingerprinting. In RADAR, the interest area is divided into a grid of 1x1 m. RSS measur ements are taken at each cell intersection to create the radio map database. Then in the on-line phase, RSS received is compared to the radio map database to estimate the target location. SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 3 In addition to RF signals, the earth’s magnetic field M F g eo and magnetic field fluctuations in indoor environ- ments can also be potentially leveraged for indoor local- ization. There are several works that show the feasibility of using anomalies of the magnetic field to provide indoor localization [11] [26] [21] [27]. However , due to ferromag- netic material and electrical objects, magnetic signatures have many ambiguities in indoor environments (i.e., similar magnetic field value in different locations). Therefor e, MF measurements should be fused with other indoor sensor measurements to derive accurate locations. Recently , landmark-based approaches have been proposed. Similar to fingerprinting-based approaches, landmark-based approaches utilize smartphone sensors to detect unique positions in the indoor environment [10] [36]. In [10], two types of landmarks are defined: seed landmarks and organic landmarks. Seed landmarks are positions that can be associated with specific objects in the environment such as stairs and elevators and are used to bootstrap the system. Organic landmarks are detected based on their unique signatur e on the sensors, and are identified by ambient radio signatures such as magnetic field or W i-Fi. The defined landmarks are used to calibrate the localization errors, which means that a car efully-designed landmark selection procedur e is the key to high performance. Although, landmark-based localization approaches can achieve high accuracy , the localization pr ocess relies heavily on the presence of numerous predefined landmarks in the environment (e.g., stairs, escalators, elevators, doors). Thus, building the landmark fingerprint database becomes an intensive effort demanding process. V arious machine learning-based approaches have been proposed that uses fingerprinting to estimate user indoor locations. Machine learning-based indoor localization can be classified into generative or discriminative methods, which builds the model using a joint probability or con- ditional probability respectively [14] [30]. K-nearest neigh- bors (KNN) is the most basic and popular discriminative technique. Based on a similarity measure such as a dis- tance function, the KNN algorithm determines the k closest matches in the signal space to the target. Then, the loca- tion of the tar get can be estimated as the average of the coordinates of the k neighbors [25]. Generative localization methods apply statistical approaches, e.g., Hidden Markov Model [28], Bayesian Infer ence [31], Gaussian Pr ocesses [29], on the fingerprint database. Thus, the accuracy can obviously be improved by adding more measurements. In [29] for instance, Gaussian Processes are used to estimate the signal propagation model through an indoor environment. There is a limited number of works that have focused in reducing off-line efforts in learning-based approaches for indoor localization [3] [4] [5]. These approaches reduce the off-line effort by r educing either the number of samples collected at each survey point or the number of survey points or both of them (i.e., reducing number of collected samples and number of survey points). Then, a generative model is applied to reinfor ce the sample collection data. In [3] for instance, a linear interpolation method is used. In [4], a Bayesian model is applied. In [5], authors propose an propagation method to generate data from collected sam- ples. In [30], authors combine characteristics of generative Figure 1: Indoor Localization System Architecture. and discriminative models in a hybrid model. Although this hybrid model reduces of fline efforts, it still r elies on a number of samples collected from fixed survey points (i.e., labeled samples) along the environment. Therefor e, to maintain high accuracy , the number of survey points shall be increased in larger environments. Thus, collecting samples from numer ous survey points will become a de- manding process, which makes the system unsuitable to large environments. Although generative approaches can handle the miss- ing value problem, discriminative approaches often achieve better performance. Generally speaking, all the machine learning-based localization methods using fingerprinting can achieve good accuracy , if a large number of labeled samples are available. However , such a sample collection process could take severals hours or days for small or big areas, which is very labor expensive and time consuming. Therefor e, it is essential to r educe the ef forts in offline sample collection pr ocedures while still maintaining high localization accuracy . Therefor e, this work proposes to combine radio signal transmission features along with magnetic field disturbance to reduce ambiguity conflicts. Moreover , our approach in- corporates a room level landmark detection in the localiza- tion process to accurately converge to the actual position. Differ ent from previous landmark-based approaches, we need only few landmarks, which significantly reduces site survey efforts. W e only define subareas in the environment as landmarks (e.g. rooms). Then, the target is first located at room level, and then applying our ranging model and particle filter algorithm, its location inside the room is derived. 3 S Y S T E M O V E R V I E W This section pr esents the design details of the proposed indoor localization problem. Figure 1 summarizes the struc- ture of our proposed approach, which includes four key subcomponents: a discrete system state space model, a discriminative learning-based room landmark recognition module, a W i-Fi ranging model, and an enhanced particle filer module. Details of each subcomponent ar e described below . SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 4 Figure 2: Discrete System State Space. Nodes (circles) are interconnected by edges. Edges define the transition model nodes. 3.1 Discrete System State Space In order to minimize computational overhead, our system defines a discrete structure to replace the conventional floor map. Thus, all the system states (i.e., indoor positions) can be repr esented by a discrete set of locations by converting from a continuous state space to a discrete state space. Figure 2 shows an example of a graphical representation of the discrete state space of our system. Nodes represent positions in the physical environment, wher eas edges define the transition model between nodes. For instance, in Figure 2 e 1 defines a potential transition from node v 1 to node v 2 and vise-versa. Thus, the essential connectivity and accessi- bility of a complex indoor environment is repr esented as an undirected graph. W e consider the physical environment G as a spatial data structur e that defines space as an array of nodes arranged in rows and columns. G can be defined as follows: G = (Υ , I , ξ ) , (1) where Υ is a set of nodes. I is a set of features defining each node υ in Υ . ξ is a set of edges e defining connections between nodes υ . The grid extraction can be carried out in a few simple steps as follows: • Specifying the areas where it is permissible to walk in rooms, corridors, etc. • Building a grid of nodes for each permitted ar ea. Nodes are separated by 0 . 25 m fr om each other in the room and column. Each node corresponds to an element υ in Υ . • Generating the subset of features i ∈ I for each υ ∈ Υ . Each subset i contains three elements related to a υ element: coordinates ( X , Y ) and an identifier of the room to which υ belongs. • Generating set ξ of node connections. Each node is connected with their immediate neighbors in the grid. 3.2 Discriminative Learning-based Landmark Detec- tion W e pr opose to use a discriminative learning-based appr oach to provide landmark recognition with r oom level accu- racy . For the purpose of indoor localization, we consider a landmark as a location point where readings of at least one sensor show a stable and discriminative pattern. This pattern is referred as the signatur e of the landmark. W e define each ar ea separated by walls as an independent r oom landmark in the indoor envir onment. In this manner , the process of building the landmark fingerprint database is simplified to collect some fingerprints by walking randomly through each predefined room. Thereby , the required effort and time to accomplish this task is significantly reduced compared to traditional fingerprinting-based and landmark- based localization approaches. Most of the indoor environments offer some ubiquitous radio signatures in different sensing domains [10]. In this work, we propose to use W i-Fi radio and magnetic field signatures to provide room landmark detection. Thus, land- mark fingerprints are composed by W i-Fi and magnetic field signatures. The tuple < f ing er print, l ocation > defines the instances in the landmark fingerprint database. W i-Fi-based landmark detection is one of the most widely used techniques, since it can make use of already deployed W i-Fi access points (APs) or anchor nodes (ANs). Additionally , it can provide landmark detection without any knowledge of the access point location or the signal propagation model [7]. However , physical configuration of the indoor environment can influence accuracy . Unlike most of the existing landmark-based approaches that define many landmarks to correct the localization err or , we use landmarks for a different purpose. In our approach, we only define landmarks at room level, and the landmark detection is applied to recognize which room a target is. Afterwards, we use this information and apply our ranging model and particle filter algorithm to further derive more accurate locations within the detected room. Therefore, we do not need to measure a lot of landmarks, which is a labor intensive task. Indoor magnetic field data combine the geomagnetic field M F g eo of the Earth and the magnetic field from fer- romagnetic objects M F env . Magnetic field readings change significantly with locations, but the magnetic field is stable over time [11]. However , distortions of the magnetic field produced by ferromagnetic material and electrical objects lead to ambiguities in the magnetic field in indoor environ- ments. Thus, using magnetic field fingerprints alone is not accurate. [21]. A smartphone’s magnetometer measures the indoor magnetic field vector M F p . Equation 2 shows the relation- ship among M F p , M F g eo and M F env in the absence of noise. M F p = M F g eo + M F env , (2) where M F p = ( M F x , M F y , M F z ) is a three- dimensional vector repr esenting the magnetic field value on the phone local coordinate system. Ther efore, M F p becomes error prone due to its phone orientation dependence. As an alternative and similar to [11], we propose to use the gravity sensor to extract the vertical M F v and horizontal M F h component of the magnetic field. Thus, the magnetic field signature is defined by the vector M F = ( M F v , M F h ) . According to the No Fr ee Lunch theorem [35], ther e is no single learning algorithm that universally performs SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 5 best across all application domains. Therefore, for indoor localization problems, a number of classifiers should be tested to validate their performance under a specific indoor environment. In fingerprinting-based landmark detection approaches, the k-nearest Neighbors (k-NN) method is a widely used technique. However , k-NN provides poor es- timation performance due to the large variability of radio signals [8]. An alternative approach is to consider the lo- calization problem as an approximation function problem. Therefor e, discriminative learning models such as KStar , Multilayer Perceptr on (MLP), J48 and Support V ector Ma- chine (SVM) can be applied for fingerprinting localization purposes. W e setup the room landmark detection method based on some experimental result analysis. Experiments were performed with KStar , Multilayer Perceptron (MLP), J48 and Support V ector Machine (SVM). Results show that in our specific setups, KStar overcomes MLP , J48, SVM in terms of landmark detection accuracy . Moreover , KStar is able to provide high r oom landmark detection accuracy . Thereby , we set up KStar as discriminative algorithm to provide room landmark r ecognition in our localization approach. KStar is an instance-based learner . It means that classification is performed based on pre-classified samples. The funda- mental assumption is that similar instances should have similar classifications [32]. In KStar , similarity is established by a distance function. Thus, distance between instances is defined as the complexity of transforming one instance into another . A detailed evaluation of the proposed landmark detection model and performance comparison of differ ent machine learning algorithms can be found in subsection 5.1. 3.3 Ranging Method W ith the derived room information, we focus on how to use the ranging model to derive more accurate location within that r oom. Range is defined as the propagation distance between the target and the ANs. Ranges can be derived by using signal parameters such as RSSI. In theory , RSSI monotonically decreases with increasing propagation distance [1]. Some models to relate RSSI to the propagation distance have been proposed e.g., Log Distance Path Loss (LDPL) [12], Nonlinear Regression Model (NLR) [1]. These models are called radio propagation models. The radio propagation model that describes the LDPL can be described by Equation 3: P ( r ) = P ( r 0 ) − 10 · γ · log 10 ( r r 0 ) , (3) where P ( r ) is the r eceived signal power in a certain location, P ( r 0 ) refers to the power loss in a fr ee space. γ is the path loss efficient. Therefore, r can be calculated as follows: r = 10 ( P ( r 0 ) − P ( r ) 10 · γ ) , (4) The NLR model is defined by Equation 5: r = α · e ( β · P ( r )) , (5) where d is the distance between the transmitter and the receiver . Both α and β are environmental variables. In indoor environments the accuracy of the radio prop- agation models is af fected by multipath and Non Line of Sight (NLOS) pr opagation [1]. Thus, to reduce ranging errors introduced by NLOS and multipath propagation, we propose a new propagation model by combining LDPL and NLR. In LDPL, P ( r 0 ) is defined under Line of Sight (LOS) propagation (i.e., free space), wher eas, NLR parameters are estimated by considering LOS and NLOS propagation. Thereby , it is expected that LDPL will perform better under LOS and short distances, whereas NLR will achieve better performance under NLOS and lar ge distances. Hence, based on these observations, we define our ranging model as follows: r = ( 10 ( P ( r 0 ) − P ( r ) 10 · γ ) if P(r) > P ( r 5 ) dB α · e ( β · P ( r )) if P ( r ) ≤ P ( r 5 ) dB (6) where P ( r 5 ) is the received signal power under LOS condi- tions (i.e., in short distance, usually 5 m ). 3.4 Enhanced Particle Filter Filtering is the problem of estimating the state of a system when a set of observations becomes available on-line [16]. W e consider indoor localization as a filtering pr oblem, in which the conver gence results predict the position of the target from a set of environmental measurements. Hence, the key component of our localization approach is the enhanced particle filter we propose. Particle filter is a pow- erful tool that is able to represent a probability distribution function (PDF) over the target area that r epresents the in- door environment [16]. Indoor localization can be modeled as estimating system state by processing a sequence of noisy measurements. Particle filters estimate the posterior distribution of the state system based on some conditioned measurements Z t at time t [2]. Thus, we define the system state vector X t at time t as follows: X t = [ x t , y t ] , (7) where ( x t , y t ) ar e the Cartesian coordinates of the target object. The set of N weighted particles can be defined as: P t = [ X i t , W i t ] , i = 1 , ..., N , (8) where X i t is the state vector with W i t of the i th particle at time t . 3.4.1 P ar ticle Initialization and Sampling Sampling function decides the location of particles. Algo- rithm 1 describes the sampling function S . At the beginning of the localization process, N particles are generated uni- formly distributed over the whole system state space. Equal weight W i t = 1 N , i ∈ [1 , N ] is assigned to each particle in P t . After initialization, all particles move according to the sampling function S . Function S introduces variety based on P t as follows: • N 0 % of the particles are spread uniformly distributed over the whole System State Space G . N 0 is the percentage of particles with lower weights. N 0 is an empirically chosen constant. • The position of particles with higher weights is up- dated based on a random function. Ther e are two SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 6 Algorithm 1: Sampling Function Input : P t − 1 = [ X i t − 1 , W i t − 1 ] ,State Space, N 0 % Output: P t = [ X i t , W i t ] 1 Order X i t − 1 ascending according w i t − 1 2 Sampling step 3 foreach n=1,... N 0 · N / 100 do 4 Position x t − 1 = draw uniformly distributed 5 end 6 foreach n=1,... N 0 · N / 100 ,... N do 7 Position x t − 1 = randomly chosen from immediate neighbor from Υ 8 end 9 Update P t from P t − 1 10 foreach X t − 1 do 11 Set x t = x t − 1 12 end possibilities, either the particle stays on the same position v ∈ Υ or it is updated to one immediate neighbor on Υ . 3.4.2 W eight Update and Resampling The associated weights W i t of the propagated particles must be corrected after updating their positions. The associated weight should be updated based on the likelihood of the ob- servations conditioned on each particle p ( Z t | X i t ) at time t . The observation vector is defined by the estimated ranges to differ ent ANs and the result of the machine learning-based room landmark detection approach. Thus, the range obser- vation vector at time t is defined as Z r t = [ d j t ] , j = 1 ...N AN , where N AN is the number of ANs. The r oom landmark observation vector at time t is defined as Z l d t . W e can assume that the ranging and the landmark detection process are independent fr om each other . Thus, the pr obability p ( Z t | X i t ) can be determined as follows: p ( Z t | X i t ) = p ( Z r t | X i t ) · p ( Z l d t | X i t ) = p ( d j t | X i t ) · p ( Z l d t | X i t ) (9) In this phase, the associated weight W i t of each particle is given by the ranging and r oom landmark information. There, at time t , small weight values will be assigned to particles with low probability to observe Z r t and Z ld t in their positions. Particles with large associated weights will have a stronger contribution in the determination of the state belief of the system. In order to avoid confusion between dif ferent likelihoods used in this work, hereafter we refer to p ( d t | X i t ) as the ranging likelihood, p ( Z l d t | X i t ) as the room landmark likelihood and p ( Z t | X i t ) as the overall likelihood. W e can assume that the ranges to dif ferent ANs ar e inde- pendent from each other . Therefore, the ranging likelihood can be defined as follows: p ( Z r t | X i t ) = N Y j =1 p ( ˆ d j,t | X i t ) , (10) where ˆ d j,t is the measured distance to the AN j at time t . Hereafter , p ( ˆ d j,t | X i t ) will be referred as the individual likelihood. Each individual likelihood can be written as: p ( ˆ d j,t | X i t ) = 1 σ j √ 2 π exp − [ ˆ d j,t − √ ( x i − x j ) 2 +( y i − y j ) 2 ] 2 2 σ 2 j , (11) where ( x j , y j ) ar e the coordinates of the j th AN. In complex indoor envir onments W i-Fi signals suffer from some random variations during transmission. This random behaviour is produced by the presence of multiple obstacles such as walls, furnitur e, ceiling, etc. Obstacles introduce a mixed transmission between Line of Sight (LOS) and Non-LOS (NLOS) conditions. NLOS propagation in- troduces a significant bias in power-based ranging [17]. T o mitigate the influence of ranging errors on the definition of the ranging likelihood p ( ˆ d k | X i t ) , we propose to adopt the same weighting technique used in our previous work [18]. The weighting technique magnifies the contribution of the individual likelihood with smaller errors and suppr esses the contribution of larger ranging errors. Therefore, the weight- ing technique is defined on each individual likelihood as follows: p ( Z t | X i t ) = N Y j =1 p ( ˆ d j | X i t ) m j , (12) where m j is the exponential weight for the individual likelihood of the j th AN. In general, estimation of larger distances introduce more errors than small distances. Thus, the exponential weight m j can be defined as being inversely proportional to the estimated range outputs [18]: m j = 1 d j P N ap n =1 1 d n , (13) where N ap is the number of ANs. Room landmark likelihood p ( Z ld t | X i t ) is provided by the machine learning-based room landmark detection approach. In section 3.2 we analyze the performance of some machine learning algorithms to detect landmarks in our indoor environment. These experiments show that the KStar algorithm achieves the best landmark detection per- formance. Thus, KStar is selected as machine learning land- mark detection algorithm for our proposed localization ap- proach. The KStar [32] classifier calculates the entropy-based distance sums over all possible transformations between two instances. Then, the probability function is defined as the probability of all transformational paths from instance a to b . The r esampling step is a crucial but computationally expensive component of a particle filter approach. This phase is adopted to eliminate particles with small associated weights by replacing them by particles with lar ge associated weights. Thus, after updating each particle in the prediction phase, we perform a resampling process in a systematic manner . The resampling process in this phase relies on the individual likelihood p ( d t | X i t ) and the room landmark likelihood p ( Z l d t | X i t ) . It means that the associated weight of each particle is calculated by using observations related to range and room landmark estimations. Afterwards, the SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 7 Figure 3: System Implementation Overview . The localization algorithms are deployed in a smartphone. weighted center given by all the particles is calculated as the estimated position of the target object. 4 I M P L E M E N TA T I O N A N D E X P E R I M E N T S 4.1 Implementation details W e have implemented a terminal-based system for accurate indoor localization. The system comprises two main compo- nents: a mobile target and many W i-Fi Anchor Nodes (ANs). The proposed localization algorithms are running on the mobile target. Figure 3 presents the overview of the system. ANs are some commercial W i-Fi access points deployed at known or unknown locations along the area of interest. Positions of the known location ANs are chosen to provide the maximum coverage inside the area of interest. Thus, the locations of ANs are defined on the boundary corners and the boundary itself. W e have adopted D-Link D-635 and D-Link DAP-2553 as W i-Fi ANs in this work. The beacon period is configured to 100 ms for ANs. The mobile target can be any commer cial Android smart- phone, which supports W i-Fi RSSI readings and magnetic field sensors readings. W e have implemented the localiza- tion algorithms in a Motorola Nexus 6 smartphone. Here- after , we refer to Motorola Nexus 6 as mobile target (MT). In order to save resour ces in the smartphone, we set the sampling rate of magnetic field sensor to 14Hz. However , the W i-Fi sampling frequency is much lower , i.e., 3Hz. T able 1 shows the main characteristics of the mobile target used in this work. Additionally , it is necessary to know the floor plan of the area of interest. The system requir es information related with r estricted areas such as sizes of walls and corridors. Particles are not allowed to be spread over restricted areas. The system reports the location of the target in real time. W e have conducted a set of experiments in office-like indoor environments to evaluate the performance of our proposed localization system. Experiments were conducted in the building of the Institute of Computer Science (INF) at the University of Bern. A part of the third floor with an area of 288 m 2 ( 18 m x 16 m ) was chosen to deploy the localization T able 1: Mobile T arget Specifications Model Platform MT Model: Motorola Nexus 6; OS: Android 5.1.1 CPU: Quad-core 2.7 GHz; RAM: 3GB WLAN: W i-Fi a/b/g/n Accelerometer: Resolution:0.039 Range:19.613 Magnetometer: Resolution: 0.150 Range:9830 system. T o evaluate the performance of each subcompo- nent in the proposed architectur e, we perform individual experiments to validate the performance of the discrimina- tive learning-based r oom landmark detection module and differ ent signal propagation models in the ranging module respectively . 4.2 Room Landmark Detection Experiment Setups Considering that the landmark detection accuracy can be influenced by some parameters of the environment, we conduct some experiments to determine how environmen- tal parameters such as position of AP or number of APs influence the accuracy of the W i-Fi-based fingerprinting landmark detection approach. Additionally , we perform experiments to show how the accuracy is impr oved by integrating magnetic field (MF) values and W i-Fi readings to establish the fingerprinting data. As shown in Figure 4, we define 9 wall separated areas in our environment. Her eafter , we refer to these areas as rooms. In order to study the effect of different environmental configurations, we define two scenarios by varying some environmental parameters: the first scenario contains 5 ANs, the second scenario includes 8 ANs. In scenario 1 the positions of the 5 ANs are known, whereas in scenario 2 the positions of AN7 and AN8 are unknown. Figure 4 presents the physical distribution of ANs in both scenarios. Internal parameters of learning-based algorithms are op- timized from training data. Additionally , certain algorithms also have parameters that are not optimized during the training process. These parameters are called hyperparame- ters of the learning-based algorithm. Due to hyperparam- eters have significant impact on the performance of the learning-based algorithm, we use a nested cross validation technique to adjust them [34]. The nested cross validation technique defines an inner and outer cross validation. The inner cross validation is intended to select the model with optimized hyperparameters, whereas outer cross validation is used to obtain an estimation of the generalization error . T en-fold cross validation was applied on both inner and outer cross validation. The classifiers were optimized over a key of hyperparameters. For KStar , we optimized global blend percentage ratio hyperparameter , kernel type func- tion, c and γ for SVM, the confidence factor for J48, number of hidden layers and neur ons per layer for MLP . Based on the parameter optimization process, we established the optimal hyperparameter values for the classifiers as follows: global percent ratio of 30% for KStar , single order polyno- mial kernel, c = 1 , γ = 0 . 0 for SVM, single hidden layer with 10 neurons for MLP , and confidence factor of 0.25 for J48. SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 8 AN 1 AN 2 AN 3 AN 4 AN 5 1 2 3 4 5 6 7 8 9 X Axis (meters) 0 2 4 6 8 10 12 14 16 18 Y Axis (meters) 0 2 4 6 8 10 12 14 16 (a) Scenario 1 (5 ANs) AN 1 AN 2 AN 3 AN 4 AN 5 AN 6 AN 7 AN 8 1 2 3 4 5 6 7 8 9 X Axis (meters) 0 2 4 6 8 10 12 14 16 18 Y Axis (meters) 0 2 4 6 8 10 12 14 16 (b) Scenario 2 (8 ANs) Figure 4: Anchor Nodes distribution and room definition (Square Points: Anchor Nodes; blue numbers: room identifier). 5 ANs are considered in scenario 1, whereas 8 ANs are deployed in scenario 2. T o test the room landmark detection performance, we performed three experiments. The first experiment tests room recognition performance in scenario 1. For this exper- iment, the landmark fingerprinting database for landmark detection contains 3712 instances, which were collected from the whole indoor environment. Additionally , we test two approaches regarding the structure of the fingerprint: W i-Fi readings alone and W i-Fi with magnetic field. The second experiment tests the influence of the position of the ANs over the room recognition accuracy . In this experiment we use the same number of ANs (AN1,AN2,AN3,AN4,AN5) as in experiment 1. Positions of AN3 and AN4 change with respect to scenario 1. Distance between AN4 and AN5 is incr eased. AN3 is placed on the right down corner of room 8. Figure 4b shows the physical positions of the ANs. The landmark fingerprint database contains 3700 instances, which wer e collected over the whole environment. The thir d experiment is intended to test the influence of the number of W i-Fi ANs that are used to define the fingerprint instance. This experiment was performed in scenario 2. The results of the landmark detection experiments can be found in subsection 5.1. T o build the landmark fingerprint database we ask a per - son to walk randomly around each room holding the phone in the hand. Instances must be collected equally distributed along the whole area in each room. Instance collection rate is only constrained by computational capabilities of the W iFi sensor of the smartphone. Thus, in our experiments each instance was collected at a rate of 3 instances/second. Be- cause our approach doest not need to predefine any survey point, the time needed to build the landmark fingerprint database is proportional to the number of collected instances multiplied by the instance collection rate. T able 8 shows the time r equired to build the landmark fingerprint database for the landmark detection method. 4.3 Ranging Experiment Setups The first step in ranging estimation is to take the initial measurements, which are aimed to train the environmental parameters α and β requir ed for the NLR model. Similar to our previous work [2], we estimate α and β values based on several stationary points. These reference points are spread over the whole floor plan. Please find details about the NLR ranging method in our previous work [2]. T o analyze the performance of LDPL and NLR over our indoor environment, we define 40 test points over the whole scenario 2. Ranges between AN6 and the 40 test points are calculated with NLR, LDPL and PFML ranging models. The differ ence between ranges reported by the propagation model and ground truth ranges are considered as the ranging error . 4.4 Localization Experiment Setups In order to determine the localization errors, 20 testing positions were defined in the interested area. The MT was held by a person who was asked to stand still at each testing point during the localization process. The Euclidean distance between positions reported by the localization sys- tem and ground truth positions is considered as localization error . Red points in Figure 4b represent the evaluated posi- tions for experiments. All the system parameters were determined beforehand. T able 2 shows the environmental parameters α , β defined for the NLR model and γ , P ( r 0 ) parameters defined for the LDPL model. Parameter N 0 of the sampling function is set to 10%. The experiment includes two phases: an off- line learning phase, and an on-line query phase. During the learning phase, a person holding the smartphone continu- ously walks through the indoor areas and collects the finger- prints and other correlated data. As mentioned before, our approach only requir es room landmark detection. Thereby , the off-line learning efforts and implementation complexity SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 9 T able 2: Environmental parameters for NLR ranging model AN α β γ P ( r 0 ) AN1 1.264 -0.03614 2.7 -30 AN2 1.278 -0.03711 2.7 -32 AN3 0.3701 -0.05153 2.7 -30 AN4 0.5663 -0.05153 2.7 -31 AN5 0.3496 -0.05328 2.7 -30 AN6 0.9739 -0.03578 2.7 -30 Discriminative learning method Experiment 2 Experiment 1 Correctly classified instances (%) 60 65 70 75 80 85 90 95 100 KStar (WiFi and MF) KStar (WiFi) MLP (WiFi and MF) MLP (WiFi) J48 (WiFi and MF) J48 (WiFi) SVM (WiFi and MF) SVM (WiFi) Figure 5: Landmark prediction performance in Experiment 1 and Experiment 2. are significantly reduced. During the on-line query phase, a person holds the smartphone and walks through the areas and her/his locations are presented on the smartphone in real-time. 5 E X P E R I M E N T R E S U L T S In this section, we discuss and analyze the results of each individual subcomponents, and the integrated real-time lo- calization accuracy . 5.1 Landmark Detection Accuracy This section discusses the accuracy of the landmark de- tection model when different classifiers are used. When comparing the performance of classifiers, it is impossible to define a single metric that provides a fair comparison in all possible applications. Ther efore, several measurements have been proposed in the literatur e [33]. W e focus on the metrics of prediction accuracy and model building time. Accuracy refers to the percentages of correct room detection, and the model building time refers to the time that the algorithm requir es to build the classification model. Figure 5 shows performance validation of the selected learning-based classifiers obtained from Experiment 1. The best performance is reached by the KStar classifier , which achieves 86% of instances correctly classified when the fingerprint is composed by W i-Fi and MF r eadings. By using W i-Fi and MF readings in the room recognition process, the accuracy is improved in all tested classifiers. The maxi- mum improvement takes place on SVM with 6%. However , the KStar classifier achieves the best overall performance with 86% of instances correctly classified. Figure 5 shows the evaluation results of the classifiers obtained from ex- periment 2. Percentage of corr ectly classified instances is increased for all tested classifiers. This is due to the fact that the similarity of signatur es in r oom 3 and room 7 decreases when the distance between AN4 and A5 increases. Therefor e, this experiment shows that the position of the ANs influences room recognition accuracy . The KStar clas- sifier achieves the best performance with 94.5% of instances correctly classified. T able 3 presents the classifier validation results obtained from Experiment 3. KStar achieves the best performance, its percentage of instances correctly classified increases in 2.8% by incr easing the number of ANs from 5 to 8. However , the improvement is just 0.1% from 7 to 8 ANs. Therefor e, increasing the number of ANs improves the accuracy of the classifier . Nevertheless, after a certain number of APs is used, the improvement of adding more APs is almost negligible in all tested classifiers. T able 3: Classification performance vs number of ANs, Ex- periment 3 (scenario 2). ANs Classifier Accuracy (%) T raining time (s) 6 ANs KStar 96.2 0 MLP 94.0 6.88 J48 92.3 0.04 SVM 91.6 3.16 7 ANs KStar 97.2 0 MLP 95.3 8.17 J48 93.1 0.15 SVM 94.4 12.87 8 ANs KStar 97.3 0 MLP 95.8 8.53 J48 92.3 0.23 SVM 95.5 12.93 In indoor environments, measured values of RSSI vary according to locations. However , it is expected that these values will remain similar on nearby positions. For example, on locations close to landmark borders, high similarities will be observed on RSSI values. These similarities could lead to misclassification problems. The KStar classifier outperforms J48, SVM and MLP in terms of accuracy and building time on the three experiments. This is because KStar is an instance-based learner algorithm, which uses entropy as a distance measur e to determine how similar two instances are. Distance between instances is defined as the complexity of transforming one instance into another . Thus, this method is more sensitive to slight variations upon the instance as unity . Unlike KStar , J48 builds the classification model by parsing the entr opy of information at attribute level. It means that J48 measures entropy in the attribute domain to decide which attribute goes in a decision node. Therefore, the classification model is prone to misclassification in this specific landmark detection problem. Although SVM shows good performance, optimized hyperparameter values affect the smoothness of the decision boundary . It could lead to a certain degree of overfitting on the model. Moreover , build- ing time on SVM is the highest compar ed to other classifiers. MLP , by means of sigmoid function, achieves about 95.8% of accuracy when using 8 ANs. However , its building time is 99.99% and 99.98% higher than KStar and J48 respectively . Therefor e, as shown on T able 3, it is clear that the KStar classifier achieves better performance than J48, SVM and MLP for the room landmark detection problem. SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 10 Range interval (meters) [0-2) [2-4) [4-6) [6-8) [8-10) [10-13] Mean error (meters) 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 NLR Model LDPL Model Figure 6: Propagation Models Error in Range intervals. LDPL perform better in short distances, whereas NLR per- form better in large distances. 5.2 Ranging Accuracy This section discusses the r esults of the proposed ranging model. Figure 6 shows the mean error of NLR and LDPL models considering range intervals. T able 4 summarizes the ranging mean error of NLR, LDPL and NLR-LDPL models. Figure 7 depicts the CDF of ranging errors for the signal propagation models. Considering the 40 test points, NLR achieves 1 . 48 m of mean error , whereas LDPL achieves 1 . 79 m. Therefore, NLR accomplishes better performance than LDPL. However , it is worth to notice that LDPL performs better than NLR when the range is shorter than 5 m , meaning that LDPL over comes NLR in LOS condi- tions. In this case, LDPL achieves 1 . 01 m of mean ranging error , whereas the mean error of NLR is 1 . 79 m . Ther eby , LDPL achieves better performance for short distances, and NLR achieves better performance for large distances. This is because parameters of the LDPL model are defined in LOS conditions, whereas parameters of NLR ar e defined considering LOS and NLOS conditions. As shown in T able4, our proposed NLR-LDPL ranging model outperforms NLR and LDPL. This is because NLR-LDPL considers LOS and NLOS conditions to apply the most suitable ranging method between NLR and LDPL. T able 4: NLR and LDPL ranging errors. Model Error(all points) Error( < 5m points) NLR 1.48 m. 1.79 m. LDPL 3.16 m. 1.01 m. NLR-LDPL 1.31 m. 1.01 m. 5.3 Localization Accuracy In this section we focus on the performance of the whole localization approach. A performance comparison between our approach and state of the art fingerprinting-based and landmark-based appr oaches would be biased. This is be- cause most of those approaches are environmentally de- pendent (i.e., they rely on the presence of numerous land- marks in the environment). Ther efore, their performance Error(in meters) 0 1 2 3 4 5 6 7 8 CDF(%) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 NLR-LDPL NLR NLPD Figure 7: CDF ranging methods will vary on different environment conditions. Moreover , unlike afor ementioned approaches, our localization solution only requires room landmark detection. However , to show the performance superiority of our solution, we compare the performance of our method with the Nonlinear Least Squares trilateration (NLST) algorithm, K-nearest neigh- bors (KNN) fingerprinting and Kalman Filter-based (KF) localization methods. Hereafter , we r efer to our particle filter machine learning localization approach as the PFML localization method. For evaluation, we collect the metrics of CDF (Cumu- lative Distribution Function) of localization errors, mean tracking error , and standard deviation of localization errors. 5.3.1 P erf or mance vs Number of P ar ticles This set of experiments was conducted in scenario 2 with 6 ANs for ranging estimation and 8 ANs for landmark recognition. Further details about the environment configuration can be seen in Figure 4b. The number of particles are 600, 1500, 2500. Figure 8a depicts the confidence intervals resulting from this set of experiments. Figure 8b shows the CDF of localization err ors for PFML localization methods. T able 7 summarizes the average of localization err ors, standar d deviation and 90% accuracy . PFML achieves the minimum mean error of 1 . 55 m with 2500 particles, which spend approximately 455 milliseconds of processing time. It is worth to notice that this configuration also yields the lowest standard deviation: 0 . 73 m . Our localization appr oach achieves the best performance by using 2500 particles. However , there is not a big gap among the performance values in all tested particle numbers in this experiment. This is because PFML defines a discrete system space to repr esent the environment. Thus, most of the potential system states fr om the posterior distribution can be covered by small number of particles. More particles will significantly increase the computation overhead, which degrades the overall system performance. 5.3.2 P erf or mance vs Number of Ranging ANs In this experiment we validate the robustness of our local- ization approach by varying the number of ranging ANs. SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 11 Number of Particles 500 1000 1500 2000 2500 3000 Mean Error 0.5 1 1.5 2 2.5 3 (a) Confidence Interval Error(in meters) 0 1 2 3 4 5 CDF(%) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 PFML 2500 Particles PFML 1500 Particles PFML 600 Particles (b) Localization error CDF Figure 8: Localization performance vs number of particles Error(in meters) 0 1 2 3 4 5 6 7 8 9 10 11 CDF(%) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 PFML 2500 Particles NLS-trilateration KNN (K=3) Kalman Filter Figure 9: Localization err or CDF PFML, NLST , KNN and KF Localization Methods PFML KF NLST KNN(K=3) Mean Error 0 1 2 3 4 5 6 Figure 10: Confidence interval PFML,NLST ,KNN W e select the number of particles that yield the best perfor- mance of PFML. Therefor e, we setup the PFML method to 2500 particles. Mor eover , we compare the performance of the PFML approach to NLST . Figure 11a depicts the mean localization error achieved by PFML and NLST methods. Figure 11b shows the CDF of localization errors of our pro- posed localization approach. T able 5 summarizes the mean T able 5: PFML Performance vs Number of ranging ANs Configuration Mean error S.D 90% Acc. PFML 6 ANs 1.55m 0.73m 2.8m PFML 5 ANs 1.7m 1.1m 2.7m PFML 4 ANs 1.95m 1.22m 3.0m PFML 3 ANs 2.09m 1.26m 2.5m NLST 6 ANs 3.05m 2.74m 7.1m T able 6: NLST Performance vs Number of ranging ANs Configuration Mean error S.D NLST 6 ANs 3.05m 2.74m NLST 5 ANs 3.22m 2.48m NLST 4 ANs 3.07m 1.3m NLST 3 ANs 3.46m 1.42m localization error , standard deviation and 90% accuracy of the PFML method. T able 6 shows the mean localization error and standard deviation of NLST . Based on these results, we can highlight the following observations. First, PFML achieves more stable and higher accuracy than the NLST method in all tested cases. This is because unlike NLST , PFML determines the target localiza- tion from a Posterior Probability Distribution (PPD). This PPD is built after considering multiple information sources such as ranges and room landmark detection. Second, by using 5 ranging ANs, PFML outperforms NLST by around 47 . 2% considering mean err or . The standard deviation of PFML is 55 . 6% smaller than for NLST . Thir d, by considering 4 ranging ANs, the standard deviation of our localization approach is 6 . 15% smaller than for NLST . PFML performs better than NLST by around 36 . 5% considering the mean error . Fourth, by considering 3 ranging ANs, PFML outper- forms NLST by around 39 . 59% and 11 . 2% regarding mean error and standard deviation, respectively . Experiment results show that the accuracy of PFML increases as mor e ranging ANs are used, whereas NLST accuracy does not significantly change. This reflects that unlike NLST , our localization approach is able to exploit diverse envir onment information sour ces (e.g., SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 12 Ranging Anchor Nodes 3 ANs 4 ANs 5 ANs 6 ANs Mean error (meters) 0 0.5 1 1.5 2 2.5 3 3.5 4 PFML 2500 Ptcl. NLS-trilat. (a) Localization error vs number of ranging ANs Error(in meters) 0 1 2 3 4 5 6 CDF(%) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 PFML(6 ANs) PFML (5 ANs) PFML (4 ANs) PFML (3 ANs) (b) PFML Localization error CDF vs number of ranging ANs Figure 11: Localization performance vs number of ranging ANs T able 7: Performance vs Number of Particles Configuration Mean error S.D 90% Acc. PFML (2500 Ptc.) 1.55m 0.73m 2.8m PFML (1500 Ptc.) 1.71m 1.073m 2.62m PFML (600 Ptc.) 1.91m 1.01m 3.5m NLST 3.79m 2.52m 8.0m KNN (N=1) 3.51m 2.1m 6.2m KNN (K=3) 3.32m 1.89m 6.1m Kalman Filter 3.36m 1.11m 4.1m magnetic filed and wireless signal propagation) to increase localization accuracy . 5.3.3 Comparison with Other Systems Performance comparison with existing solutions can proof the superiority of the proposed system. However , for indoor localization, it is rather hard to implement all the specific details of an existing solution and repeat the identical experiment to get the same results that were collected in another physical indoor environment. Therefore, similar to many other indoor localization systems, we compare our system with classical indoor localization solutions, such as fingerprinting, Kalman filter-based (KF) and trilateration approaches. Figure 9 depicts the CDF of localization error for the best performance of PFML, NLST and the KNN method (K=3), whereas Figure 10 shows the confidence intervals of the best performance of PFML, KF , NLST and KNN (K=3) methods. As shown in T able 7, NLST achieves around 8 . 0 m for 90% accuracy , the mean error is 3 . 79 m and the standard deviation is 2 . 52 m . For K = 3 , the KNN localization method achieves around 6 . 1 m for 90% accuracy , the mean error is 3 . 32 m and the standard deviation is 1 . 89 m . The KF approach achieves around 4 . 1 m for 90% accuracy , the mean error is 3 . 36 m and the standard deviation is 1 . 11 m . Our localization approach outperforms NLST by around 65% , KNN by around 54 . 1% and KF by around 31 . 7% regar ding 90% accuracy . Moreover , confidence intervals of PFML are around 20% smaller than for KF and 50% smaller T able 8: Offline survey time of different approaches Localization method Instances Survey time PFML(landmark detection + ranging) 3712+20 21+28=49 min KNN 5060 460 min NLST (ranging) 20 28 min LS-SVM-W A [30] 8056 403 min than for NLST and KNN. The mean error of the PFML approach is 53 . 8% , 59 . 1% and 53 . 31% better than for KF , NLST , and KNN respectively . Standard deviation is 71 . 03% smaller than for NLST and 61 . 4% smaller than for KNN. Moreover , it is worth to mention that because PFML requir es only room landmark detection, the survey time of PFML is around 88% smaller than the survey time employed to build the KNN fingerprinting database. Experiment r esults show that because of the integra- tion of machine learning-based room landmark detection, ranging models and particle filter methods, our localization method outperforms KF , NLST and KNN for accuracy and stability . Moreover , PFML can significantly reduce the off- line survey ef fort compared to common fingerprint-based and landmark-based localization approaches. Furthermore, although the ranging method for both PFML and NLST is the same, PFML is able to achieve higher localization accuracy than NLST . 5.4 Adv antage of Using PFML Localization Method As mentioned before, PFML is able to reduce the off-line phase effort while still achieving high accuracy . Unlike tra- ditional fingerprinting-based indoor localization methods, PFML does not define any fixed survey point to build the landmark fingerprint database. Thus, the offline phase becomes a simple process. The time requir ed to build the landmark fingerprint database depends only on the number of collected instances and the instance collection rate given by the W i-Fi sensor of the smartphone (i.e., 3Hz). Therefore, the time required to complete the offline phase in PFML is defined as follows: T of f line,P F M L = I · S rate + T rang ing , (14) SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 13 where I is the number of collected instances, S rate is the instance collection rate. The landmark fingerprint database of the PFML local- ization method contains 3712 instances. Thus, building this database takes around 3712 / (3 · 60) = 21 minutes. Addi- tionally , to estimate α and β values for the ranging method, we define 20 r eference points. This process takes around 28 minutes. Thus, the required time to complete the offline phase in PFML is around 21 + 28 = 49 minutes. The KNN radio map database contains 5060 instances. W e define the indoor area as a grid of square cells of l = 1 m . Each cell intersection defines a survey point. Thus, 85 survey points were defined in the whole area of interest. Around 60 instances were collected in each survey point. In or der to compar e KNN with our approach, we relate the requir ed time to complete the offline phase in fingerprinting-based approaches to the number of survey points, the time needed to define each survey point, the time needed to go from one survey point to another during the site survey phase, number of collected instances and the instance collection rate. Therefor e, the total offline time in KNN is defined as follows: T of f line,K N N = S p · ( t sp + t sw ) + I · S rate , (15) where S p is the number of survey points, t sp is the time needed to measur e the coor dinates of each survey point, t sw is the time needed to go from one survey point to another during the site survey phase, I is the number of collected instances, S rate is the instance collection rate. Empirically , we approximate t sp and t sw to 300 and 5 seconds respectively . Ther efore, the requir ed time to com- plete the offline phase in KNN is around 460 minutes. Assuming that the effort is proportional to the time spent in the offline phase, PFML reduces the offline effort by around 89% compared to fingerprint-based appr oaches. In LS-SVM- W A [30], 80 labeled and 72 unlabeled samples are collected on 53 fixed survey points, which takes (53 · 305 + 8056) / 60 = 403 minutes. T able 8 summarizes number of data instances that have been collected during the experiments and survey time of PFML, KNN, NLST , and LS-SVM-W A [30]. Clearly , PFML takes much less time and effort to deploy the system and perform the data measurement when compared to fingerprinting-based, landmark-based appr oaches and other works that focus on reducing the calibration efforts. 6 C O N C L U S I O N S This work exploits an enhanced particle filter appr oach to fuse discriminative learning-based landmark detection, ranging methods and physical information of the envi- ronment to achieve high localization accuracy in complex indoor scenarios for smartphones. Since our approach re- quires only room landmark detection, we are able to signifi- cantly reduce the effort and time requir ed in processing the off-line phase compared to traditional fingerprinting-based and landmark-based approaches. Moreover , to incorporate a suitable discriminative learning-based landmark detec- tion method, we assess the room recognition performance with the most popular discriminative learning algorithms. W e conduct experiments to analyze the impacts of anchor nodes’ position on the landmark detection accuracy . Addi- tionally , based on ranging experiment r esults, we propose a composed NLR-LDPL ranging method. T o evaluate our localization system, we conducted extensive experiments in a complex of fice-like environment. Experiment results show that our appr oach can achieve an average tracking error of 1 . 55 m and 90% accuracy is 2 . 8 m . Compared to fingerprinting-based and landmark-based approaches, our solution r equires much less time in the of fline process, while keeping the accuracy at a high level. Our solution is more accurate and stable than the commonly used Kalman filter , nonlinear least square trilateration and KNN-fingerprinting methods. Furthermor e, our pr oposed appr oach enables r eal- time localization at the smartphone without assistance of any additional server . A C K N OW L E D G M E N T This work was partly supported by the Swiss National Sci- ence Foundation via the SwissSenseSynergy project under grant number 154458. R E F E R E N C E S [1] Z. Li and T . Braun and D. Dimitr ova, A Passive W i-Fi Source Localization System Based on fine-grained power-based trilateration. Proceedings of the IEEE International Symposium on a W orld of W ireless, Mobile and Multimedia Networks (W oWMoM), 2015. [2] J. Carrera and Z. Li and Z. Zhao and T . Braun and A. Neto, A Real-time Indoor T racking System in Smartphones. Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of W ireless and Mobile Systems (MSW iM), 2016. [3] X. Chai and Q. Y ang, Reducing the calibration Effort for Probabilistic Indoor Location Estimation. IEEE T ran. Mobile Computing, vol 6, no 6, pp. 649-662, 2016. [4] D. Madigan and E. Einahrawy and R. Martin and W . Ju and P . krishnan and A. Krishnakumar , Bayesian Indoor Positioning Systems. IEEE. INFOCOM, vol 2, pp. 1217-1227, 2005. [5] S. Liu and H. Luo and S. Zou, A Low-Cost and Accurate Indoor Localization Algorithm Using Label Propagation based Semi Supervised Learning. Fifth International Conference Mobile Ad-Hoc and Sensor Networks, pp. 108-111, 2009. [6] R. Ouyang and A. W ong, Indoor Location Estimation with Reduced Cal- ibration Exploiting Unlabeled Data via Hybrid Generative/Discriminative Learning. IEEE T ransactions On Mobile Computing, vol. 11, no. 11, pp. 1613-1626, November 2012. [7] Y .Li and P . Zhang and X. Ni, Real-time Indoor Navigation using Smart- phone Sensors. International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2015. [8] M.Moreno-Cano and M. Zamora-Izquierdo and J. Santa and A. Skarmeta An indoor localization system based on artificial neural net- works and particle filters applied to intelligent buildings. ELSEVIER Neurocomputing, 2013. [9] S. He and G. Chan Wi-Fi Fingerprint-Based Indoor Positioning:Recent Advances and Comparisons. IEEE COMMUNICA TIONS SUR VEYS & TUTORIALS, 2016. [10] H. Abdelnasser and R. Mohamed and A. Elgohary and M. Alzan- tot and H. W ang and S. Sen and R. Choudhury and M. Y oussef Se- manticSLAM: Using Environment Landmarks for Unsupervised Indoor Localization. IEEE T ransactions on Mobile Computing, 2016. [11] H. Xie and T . Gu and X. T ao and H. Y e and J. Lu A Reliability- Augmented Particle Filter for Magnetic Fingerprinting Based Indoor Lo- calization on Smartphone. IEEE T ransactions on Mobile Computing. [12] S. Seidel and T . Rappaport 914 MHz Path Loss Predictions Models for Indoor Wir eless Communications in Multi-floored Buildings. IEEE T ransactions on Antennas and Propagation, 1992. [13] J. Krumm and S. Harris and B. Meyers and B. Brumitt and M. Hale and S. Shafer Multi-camera multi-person tracking for EasyLiving. Third IEEE International W orkshop on V isual Surveillance, 2002. SUBMITTED T O IEEE TRANSACTIONS ON MOBILE COMPUTING 14 [14] S. He and S. Chan Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE COMMUNICA TIONS SUR VEYS & TUTORIALS, 2016. [15] A. W ard and A. Jones A. Hopper A new location technique for the active office. IEEE Personal Communications, 1997. [16] R. van der Merwe and A. Doucet and N. Freitas and E. W an The Unscented Particle Filter . Advances in Neural Information Processing System, 2001. [17] C. W u and Z. Y ang and Z. Zhou and K. Qian and Y . Y unhao and M. Liu PhaseU: Real-time LOS Identification with Wi-Fi. IEEE Conference on Computer Communications (INFOCOM), 2015. [18] Z. Li and D. Burbano and Z. Zhao and Jose Carrera and T . Braun Fine-grained Indoor T racking by Fusing Inertial Sensor and Physical Layer Information in WLANs. IEEE International Conference on Communications, 2016. [19] T . Kavzoglu and I. Colkesen Entropic distance based K-star algorithm for remote sensing image classification. Fresenius Environmental Bulletin, 2011. [20] J. Cleary and L. T rigg K*: An Instance-based Learner Using Entropic Distance Measure. International conference on Machine Learning. [21] J. Jung and S. Lee and H. Myung Indoor Mobile Robot Localization and Mapping Based on Ambient Magnetic Fields and Aiding Radio Sources. IEEE T ransactions on Instr umentation and Measur ements, 2015. [22] B. Li and C. Rizos and A. Demper and J. Barnes Hybrid Method for Localization Using WLAN. The Spatial Sciences Conference, 2005. [23] B. Li and J. Salter and A. Dempster and Chris Rizo Indoor Posi- tioning T echniques Based on Wir eless LAN. The IEEE international Conference on W ireless Broadband and Ultra W ideband Commu- nications, 2006. [24] V . Padmanabhan and V . Bahl RADAR: An In-building RF-based User Location and T racking System. IEEE 19th International Conference on Computer Communications, 2000. [25] B. Lakmali and W . W ijesinghe and K. de SIva and K. Liyanagama and S. Dias Design, Implementation & T esting of Positioning T echniques in Mobile Networks. The 3rd International Conference on Informa- tion and Automation for Sustainability , 2007. [26] Y . Shu and C. Bo and G. Shen and C. Zhao and L. Li and F . Zhao Magicol: Indoor Localization Using Pervasive Magnetic Field and Opportunistic Wi-Fi Sensing. IEEE Journal on Selected Areas in Communications, 2015. [27] Y . Shu and C. Bo and G. Shen and C. Zhao and L. Li and F . Zhao SignalSLAM: Simultaneous localization and mapping with mixed Wi-Fi, Bluetooth, L TE and magnetic signals. International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2014. [28] Z. Ghahramani An Introduction to Hidden Markov Models and Bayesian Networks. International Journal of Pattern Recognition and Artificial Intelligence, 2001. [29] B. Ferris and D. Hahnel and D. Fox Gaussian Processes for Signal Strength-based Location Estimation. Procedur es of Robotics Science and Systems, 2006. [30] R. W . Ouyang and A. K. S. W ong and C. T . Lea and M. Chiang Indoor Location Estimation with Reduced Calibration Exploiting Un- labeled Data via Hybrid Generative/Discriminative Learning. IEEE T ransactions on Mobile Computing, 2012. [31] O. Bousquet and U. von Luxburg and G. Ratsch Bayesian Infer- ence: An Introduction to Principles and Practice in Machine Learning. Fresenius Environmental Bulletin 20(5), 2004. [32] J. Cleary and L. T rigg K*: An Instance-based Learner Using an Entropic Distance Measure. In: 12th International Conference on Machine Learning, 108-114, 1995. [33] D. Amancio and C. Comin and D. Casanova and G. T ravieso and O. Martinez and F . Rodrigues and L. Costa A Systematic Comparison of Supervised Classifiers. PLoS ONE 9(4): e94137. [34] K.-R. Mller and M. Krauledat and G. Dornhege and G. Curio and B. Blankertz Machine learning techniques for brain-computer interfaces. BIOMEDICAL ENGINEERING, 11-22, 2004. [35] D. W olpert and W . Macready and H. David and G. W illiam No Free Lunch Theorems for Search. T echnical Report SFI-TR-95-02-010. [36] Z.-A. Deng Deng and G. W ang and D. Qin and Z. Na and Y . Cui and J. Chen Continuous Indoor Positioning Fusing WiFi, Smartphone Sensors and Landmarks. Sensors, vol. 16, no. 9, p. 1427, Sep. 2016. Jos ´ e Luis. Carrera V . received the B.S.E. de- gree from the National Polytechnic School from Equator and the MSc. degree in computer sci- ences from the Swiss Joint Master of Science in Computer Science prog ram of the universities of Neuch ˆ atel, F ribourg and Bern in 2015. He is currently working tow ard the Ph.D . degree in the Institute of Computer Sciences of the University of Ber n. His research interests include Ar tificial Intelligence, Machine Learning, indoor localiza- tion and distributed systems. Zhongliang Zhao receiv ed the Ph.D . degree from the University of Ber n in 2014. He was a Senior Researcher with the University of Ber n since then. He was m ultiple W ork P ackage lead- ers in the EU FP7 project Mobile Cloud Net- working, a Co-PI of the Sino-Swiss Science and T echnology Cooperation project M3WSN. He is currently the T echnical Coordinator of the Swiss National Science Foundation project SwissSenseSynergy , and Orange-funded Con- text A wareness Engine industry project. T orsten Braun received the Ph.D . degree from the University of Kar lsruhe, Ger many , in 1993. Since 1998, he has been a Full Professor in computer science with the Univ ersity of Bern. He has been the Vice President of the SWITCH Foundation since 2011. He received the Best P aper A ward from the IEEE LCN 2001, WWIC 2007, EE-LSDS 2013, IFIP WMNC 2014, ARM- SCC 2014 Workshop , and the GI-K uVS Commu- nications Software A ward in 2009. Haiyong Luo received the B.S . degree from Huazhong Univ ersity of Science and T echnol- ogy , Wuhan, China, in 1989, M.S. degree from the Beijing University of Posts and T elecommu- nications, Beijing, China, in 2002, and Ph.D . de- gree from the University of Chinese Academy of Sciences (CAS), Beijing, China, in 2008. He is currently an Associate Professor at the Insti- tute of Computing T echnology , CAS. His main research interests include per v asive computing, mobile computing, and the Internet of Things. Fang Zhao received the B.S . degree from Huazhong Univ ersity of Science and T echnol- ogy , Wuhan, China, in 1990, M.S . and Ph.D . degrees from Beijing University of P osts and T elecommunications (BUPT), Beijing, China, in 2004 and 2009. She is currently a Professor in School of Software Engineering, BUPT . Her current research interests include mobile com- puting, location-based services, and computer network.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment