Generalized Labeled Multi-Bernoulli Approximation of Multi-Object Densities
In multi-object inference, the multi-object probability density captures the uncertainty in the number and the states of the objects as well as the statistical dependence between the objects. Exact computation of the multi-object density is generally…
Authors: Francesco Papi, Ba-Ngu Vo, Ba-Tuong Vo
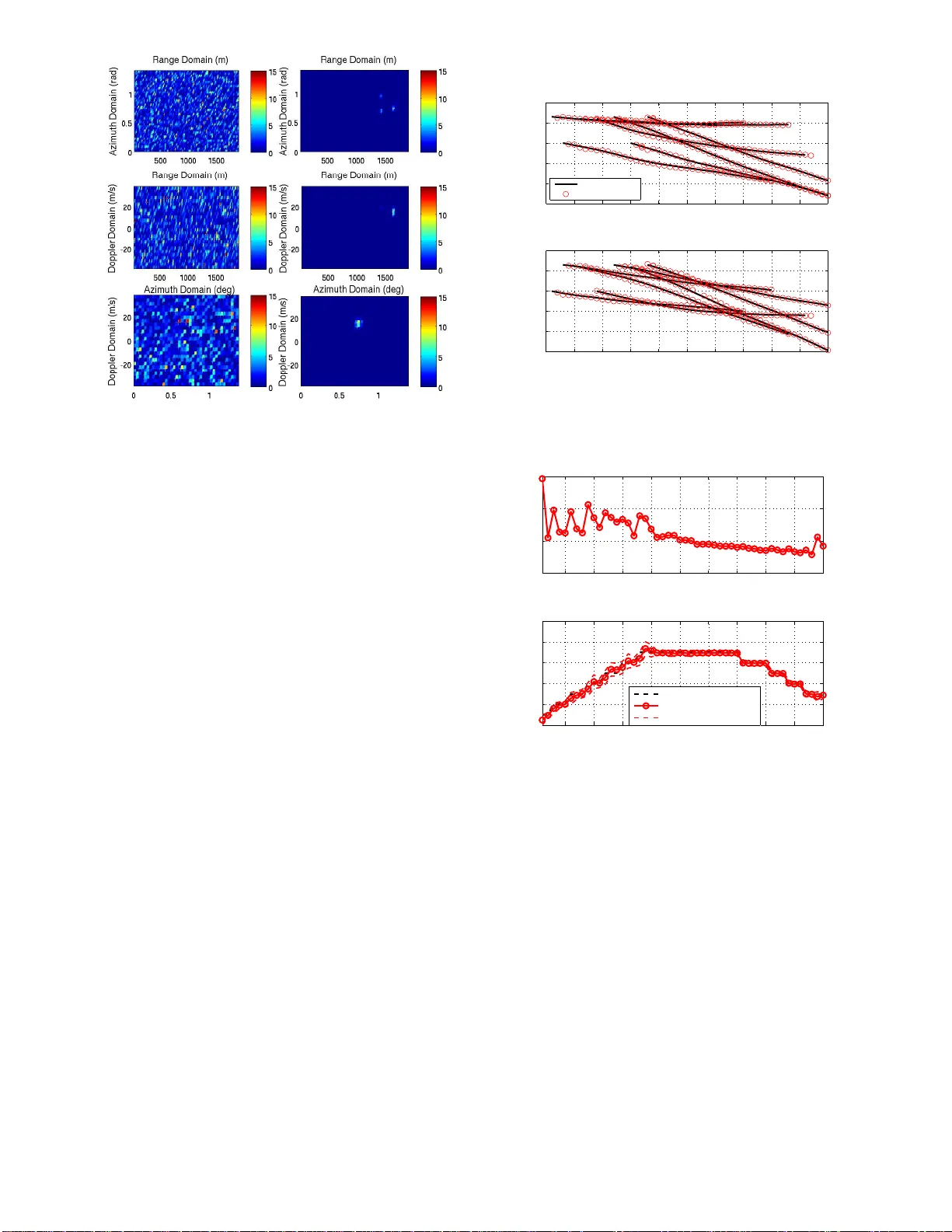
1 Generaliz ed Labeled Multi-Ber noulli A ppr ox imation of Multi-Obje ct Densities Francesc o Papi, Ba-Ngu V o, Ba-T uong V o, Claudio Fantacci, a nd Michael Beard Abstract —In multi-object inference , the multi-object prob- ability density captu res the uncertainty in the nu mber and the states of the objects a s well as the statistical dependence between the objects. Exact computation of the multi-object density is generally intracta ble and tractable implementations usually require statistical independen ce assumptions between objects. In this paper we propose a tractable mu lti-object density approximation that can captur e statistical dependence between objects. In particular , we derive a t ractable Generalized Labeled Multi-Bernoulli (GLMB) d ensity th at matches the cardinality distribution and the fi rst moment of the labeled mu lti-object distribution of interest. It is also shown that the proposed approx - imation minimizes the Kullback-Leib ler div erg ence ov er a sp ecial tractable class of GLMB densities. Based on the p roposed GLMB approximation we further demonstrate a tractable multi-object tracking algorithm for generic measurement models. Simul ation results for a multi-object T rack-Befo re-Detect example using radar measurements i n low signal-to-noise ratio (SNR) scenarios verify the applicability of the proposed approac h. Index T erms —RFS, FISST , Multi-Object T racking, PHD. I . I N T RO D U C T I O N I N multi-ob ject infe rence the objective is the estimation of an unknown nu mber o f objec ts and their ind i vidual states from n oisy obser vations. Mu lti-object estimatio n is a core problem in sp atial statistics [1], [2], and multi-target tracking [3], [4], span ning a diverse range of ap plications. Imp ortant applications of spatial statistics inclu de ag riculture/f orestry [5]–[7], epidemiology/p ublic health [1], [2], [ 8], communi- cations n etworks [9]–[1 1], while application s of multi-target tracking in clude radar /sonar [12]–[14], co mputer v ision [15]– [18], autonomou s vehicles [19]–[22], autom otiv e safety [ 23], [24] and sensor networks [25]–[28]. The multi-object probabil- ity density is fundam ental in multi-objec t estimation because it capture s the uncertainty in the nu mber and the states of the objects as well as the statistical depend ence between the objects. Statistical de penden ce between objects tr anspires via the data when we consider the multi-o bject po sterior density , or from the interactions between o bjects as in Markov point processes [29], [ 30] or de terminantal point pro cesses [31]– [33]. Ackno wled gement: This work is supported by the Australian Research Council under schemes DP130104404 and DE120102388. Francesco Papi, Ba-Ngu V o, and Ba-T uong V o are with the Department of Electric al and Computer Engineering , Curt in Uni ve rsity , Bentley , W A 6102, Australia . E-m ail: {francesco.papi, ba-tuong, ba-ngu.vo}@cur tin.edu.au Claudi o Fant acci i s with the Dipartiment o di Inge gneria dell’Inf ormazione ,Uni ve rsità di Firenze, Florence 50139, Italy . E-m ail: claudi o.fant acci @unifi.it Michae l Beard i s with Maritime Divisi on, Defence Scien ce and T echnology Organisati on, Rockingham, W A 6958, A ustrali a. E -mail: michael .beard@dsto .defence .gov .au Computing the multi-object d ensity is ge nerally intractable and ap proxim ations ar e n ecessary . T ractable m ulti-object den - sities usually assum e statistical inde penden ce betwe en the objects. For example, the Prob ability Hyp othesis De nsity (PHD) [34], Cardinalized PHD (CPHD) [3 5], and m ulti- Bernoulli filters [36], are deriv ed from multi-ob ject densities in which objects are statistically independ ent. On the othe r h and, multi-objec t track ing a pproach es such as Multiple Hy potheses T racking (MHT) [13], [37], [3 8] and Joint Prob abilistic Data Association (JPD A) [14] are capable of modeling the statistical depend ence between o bjects. Howe ver, MHT doe s not have the notion of m ulti-object density while JPD A only has the notion of multi-o bject density for a known numb er of objects. A tractable family of multi-ob ject densities that can capture the statistical depend ence between the obje cts is the r ecently pro- posed Generalized Labeled Multi-Berno ulli (GLMB) family , which is conju gate with respe ct to the standard measurem ent likelihood f unction [39], [40]. The bulk of multi-object estimatio n algo rithms in the lit- erature, in cluding those d iscussed ab ove, are designed for the so-called standard measuremen t model, where data has been preproce ssed into point measurements or detections [12]– [14], [3 5], [3 6]. For a gene ric measuremen t mo del the GLMB density is not necessarily a conjugate prior, i.e. the multi-ob ject posterior density is not a GLMB. This is th e case in Track- Before-Detect (TBD) [41]– [46], tracking with sup erpositiona l measuremen ts [47], [48], me rged measuremen ts [49], and video measurements [50], [17]. I n general, the multi-object density is numerically intractable in applications inv olving non-stand ard mea surement models. A simple strategy th at drastically reduce s the nume rical complexity is to appr oximate the m easuremen t likelihood by a sep arable likelihoo d [50] for which Poisson, indep endently a nd identically distributed ( IID) cluster , multi-Bernou lli and GLMB densities are c onjugate. While this app roximatio n can f acilitate a trad e o ff between tractability and perf ormanc e, b iased estimates typica lly arise when the sep arable assumption is vio lated. Inspired by Mahler’ s IID clu ster ap proxim ation in the CPHD filter [ 35], in th is pap er we co nsider the ap proxim ation of a g eneral lab eled R FS density using a special tractable class of GL MBs. In particu lar , we derive from this class of GLMBs, an approx imation to any labeled RFS density which preserves the cardin ality distribution and the first moment. It is also established that our appro ximation minimizes the Kullback-Leibler divergence (KLD) over this class of GLMB densities. This app roximatio n is then applied to de velop an efficient multi- object track ing filter for a generic m easuremen t model. As an example applicatio n, we con sider a rad ar m ulti- 2 object TBD problem with low signal-to -noise ratio (SNR) and closely spaced targets. Simulation results verify th at the propo sed approx imation yields e ffecti ve tr acking perform ance in challenging scenarios. The paper is structured as follows: in Section II we recall some definitions and results for Labeled rand om finite sets (RFSs) and GLMB d ensities. I n Section III we p ropose the G LMB ap proxim ation to multi- object distributions v ia car di- nality , first mo ment ma tching an d KLD min imization. I n Sec- tion IV we describe the application of our result to multi-object tracking pro blems with non-standar d measur ement models. Simulation results for challenging , low SNR, multi-target TBD in radar scenarios ar e shown in Section V . Conclusion s and future research directions are re ported in Section VI. I I . B AC K G R O U N D This section briefly p resents backg round ma terial o n multi- object filtering and labeled RFS which form the b asis for th e formu lation of our multi-object estimation problem. A. Labeled RFS An RFS on a space X is sim ply a random variable taking values in F ( X ) , the space of all finite subsets of X . T he space F ( X ) doe s no t in herit th e Eu clidean notion of integra- tion and den sity . None theless, Mah ler’ s Finite Set Statistics (FISST) provides powerful yet practical mathem atical tools for dealing with RFSs [3], [34], [51] based on a notion of integration/den sity that is con sistent w ith m easure th eory [5 2]. A labe led RFS is an RFS whose elements are assigned unique distinct lab els [39]. In this m odel, the single- object state space X is the Cartesian pr oduct X × L , wh ere X is the kinematic/fea ture space an d L is the (discrete) label space. Let L : X × L → L b e the projection L (( x, ℓ )) = ℓ . A finite subset set X of X × L has distinct labels if X and its labels L ( X ) , { ℓ : ( x, ℓ ) ∈ X } ha ve the same card inality . An RFS on X × L with distinct labe ls is called a lab eled RFS [ 39]. For the rest of the paper, we use the stan dard inner prod uct notation h f , g i , ´ f ( x ) g ( x ) dx , an d mu lti-object expon ential notation h X , Q x ∈ X h ( x ) , where h is a real-valued f unction, with h ∅ = 1 b y con vention. W e denote a generalizatio n of the Kroneker d elta an d the inclusion functio n wh ich take arbitra ry arguments such as sets, vectors, etc, by δ Y ( X ) , 1 , if X = Y 0 , o therwise 1 Y ( X ) , 1 , if X ⊆ Y 0 , o therwise W e also wr ite 1 Y ( x ) in place o f 1 Y ( { x } ) when X = { x } . Single-ob ject states are r epresented by lowercase letter s, e.g . x , x , while multi-ob ject states are rep resented by upperca se letters, e.g. X , X , symbo ls fo r labeled states and their distri- butions are bolded to distingu ish them from unlabeled ones, e.g. x , X , π , etc, spa ces are repr esented by blackbo ard bold e.g. X , Z , L , etc. The integral o f a function f on X × L is giv en by ˆ f ( x ) d x = X ℓ ∈ L ˆ f ( x, ℓ ) dx. T wo impo rtant statistics o f an RFS relev ant to this paper are the cardinality d istribution ρ ( · ) and the PHD v ( · ) [3]: ρ ( n ) = 1 n ! ˆ π ( { x 1 , ..., x n } ) d ( x 1 , ..., x n ) (1) v ( x, ℓ ) = ˆ π ( { ( x, ℓ ) } ∪ X ) δ X (2) where the integral is a set in te gral defin ed fo r any fun ction f on F ( X ) by ˆ f ( X ) δ X = ∞ X i =0 1 i ! ˆ f ( { x 1 , ..., x i } ) d ( x 1 , ..., x i ) . The PHD in (2) and the unlabeled PHD in [39], i.e. the PHD of the unlabeled version, are related by v ( x ) = P ℓ ∈ L v ( x, ℓ ) . Hence, v ( · , ℓ ) can be in terpreted as the contribution from label ℓ to the unlabeled PHD. B. Generalized Labeled Multi-Berno ulli An important class of labeled RFS is the gener alized labeled multi-Berno ulli (GLMB) family [39], whic h for ms the ba sis of an analytic solutio n to the Bayes mu lti-object filter [40]. Under the standa rd multi-object likelihood , the GLMB is a conjuga te pr ior , which is a lso closed under the Chapman - K olmogorov equatio n [3 9]. Th us if initial prior is a GLM B density , then the multi-object prediction and posterior densities at all subsequent tim es are also GLMB den sities. A GLMB is an RFS of X × L distributed acco rding to π ( X ) = ∆( X ) X c ∈ C w ( c ) ( L ( X )) h p ( c ) i X (3) where ∆( X ) , δ | X | ( |L ( X ) | ) deno tes the distinct lab el in dica- tor , C is a discrete index set, and w ( c ) , p ( c ) satisfy: X L ⊆ L X c ∈ C w ( c ) ( L ) = 1 , (4) ˆ p ( c ) ( x, ℓ ) dx = 1 . (5 ) The GLMB den sity (3) can be interp reted as a mixtu re of multi-objec t expo nentials. Ea ch term in (3) consists of a we ight w ( c ) ( L ( X )) that d epends only on the labels of X , an d a multi-objec t exponen tial p ( c ) X that depends on the labels and kinematics/featur es of X . The car dinality distribution and PHD of a GLMB are, respectively , given by [39] ρ ( n ) = X c ∈ C X L ⊆ L δ n ( | L | ) w ( c ) ( L ) , (6) v ( x, ℓ ) = X c ∈ C p ( c ) ( x, ℓ ) X L ⊆ L 1 L ( ℓ ) w ( c ) ( L ) . (7) A Labeled Multi-Ber noulli (LMB) density is a special case of the GL MB density with one term (in which case the superscript ( c ) is not need ed) an d a specific for m for the only weight w ( · ) [39], [53]: w ( L ) = Y ℓ ∈ M 1 − r ( ℓ ) Y ℓ ∈ L 1 M ( ℓ ) r ( ℓ ) 1 − r ( ℓ ) , (8) 3 where r ( ℓ ) for ℓ ∈ M ⊆ L represents th e existence probab ility of track ℓ , and p ( · , ℓ ) is th e probability density of the kinematic state of track ℓ co nditional up on existence [3 9]. No te that the LMB density can always be factored in to a product o f terms over the elements of X . T he LMB density can thus be interpreted as c omprising mu ltiple in depend ent tr acks. The LMB den sity is in fact the basis o f the LMB filter, a principled and efficient appr oximation o f th e Bayes multi-ob ject track ing filter , which is highly paralleliza ble and capab le of track ing large n umbers of targets [53], [54]. I I I . M U LT I - O B J E C T E S T I M A T I O N W I T H G L M B S In this section we discuss the multi- object estimation prob- lem with GLMBs. I n particu lar , in subsection I II-A we p resent a simp le app roxima tion through a separable likelihood func- tion which exploits the conju gacy o f the GLMB distributions, while in subsection III- B we pr opose a mor e princip led approa ch for ap proxim ating a g eneral labeled RFS density with a special for m GLMB that matches both the PHD and cardinality distribution. A. Conjugacy with r espect to Separable Lik elihoods A separable mu lti-object likelihoo d o f the state X given the measuremen t z is one of the fo rm [50]: g ( z | X ) ∝ γ X z = Y x ∈ X γ z ( x ) (9) where γ z ( · ) is a non-negative function d efined on X . It was shown in [ 50] that Poisson, IID cluster an d mu lti- Bernoulli d ensities are con jugate with respe ct to separab le multi-objec t likelihoo d f unctions. Moreover, th is conjug acy is easily extented to the family of GLM Bs. Proposition 1. If the multi-o bject prior density π is a GLMB of th e form (3) a nd the multi-object likelihood is separable of th e form (9), th en the multi-object posterior d ensity is a GLMB of the fo rm: π ( X | z ) ∝ ∆( X ) X c ∈ C w ( c ) z ( L ( X )) h p ( c ) ( ·| z ) i X (10) wher e w ( c ) z ( L ) = [ η z ] L w ( c ) ( L ) (11) p ( c ) ( x, ℓ | z ) = p ( c ) ( x, ℓ ) γ z ( x, ℓ ) /η z ( ℓ ) (12) η z ( ℓ ) = D p ( c ) ( · , ℓ ) , γ z ( · , ℓ ) E (13) Pr oo f: π ( X | z ) ∝ γ X z π ( X ) = ∆( X ) X c ∈ C w ( c ) ( L ( X )) γ X z [ p ( c ) ] X = ∆( X ) X c ∈ C w ( c ) ( L ( X )) [ η z ] L ( X ) γ z p ( c ) X [ η z ] L ( X ) = ∆( X ) X c ∈ C w ( c ) z ( L ( X )) h p ( c ) ( ·| z ) i X . In general, the true multi-ob ject likelihood is not separa- ble, however the separable likelihoo d assumption can be a reasonable approxim ation if the objects do not overlap in the measuremen t space [50]. B. Labeled RFS Den sity Appr ox imation In this su bsection we p ropose a tra ctable GLMB den sity approx imation to an arbitrary labeled m ulti-object density π . T ractable GLMB densities are nu merically ev a luated via the so-called δ -GL MB form whic h in v olves explicit en umeratio n of the label sets ( for more details see [ 39], [40]). Since there is no general inform ation o n the f orm of π , a natural choice is the class of δ - GLMBs of th e form ¯ π ( X ) = ∆( X ) X L ∈F ( L ) ¯ w ( L ) δ L ( L ( X )) h ¯ p ( L ) i X (14) where eac h ¯ p ( L ) ( · , ℓ ) is a d ensity on X , an d each weight ¯ w ( L ) is no n-negative such tha t P L ⊆ L w ( L ) = 1 . It f ollows f rom (6) and (7) that the c ardinality distrib ution and PHD of (14) are giv en, re spectiv ely , by ¯ ρ ( n ) = X L ⊆ L δ n ( | L | ) ¯ w ( L ) , (15) ¯ v ( x, ℓ ) = X L ⊆ L 1 L ( ℓ ) ¯ w ( L ) ¯ p ( L ) ( x, ℓ ) . (16) Note that such δ -GLMB is comp letely char acterised by th e parameter set { ( ¯ w ( L ) , ¯ p ( L ) ) } L ∈F ( L ) . Our objective is to seek a density , via its parameter set, from this class of δ -GLMBs, which matches the PHD and cardina lity d istribution of π . The strategy of match ing the PHD and cardin ality d istribu- tion is inspir ed by Mah ler’ s IID cluster approximatio n in the CPHD filt er [ 35], which has p roven to be very e ffecti ve in practice [4], [ 55], [56]. While our result is u sed to develop a m ulti-object trac king algorithm in the next sectio n, it is not necessarily r estricted to tracking applicatio ns, an d can be used in more general mu lti-object estima tion problems. Our result fo llows from the following repr esentation for labeled RFS. Definition 1. Gi ven a labeled multi-ob ject density π o n F ( X × L ) , and any positive integer n , we defin e the jo int exis tence pr oba bility o f the label set { ℓ 1 , ..., ℓ n } by w ( { ℓ 1 , ..., ℓ n } ) , ˆ π ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) (17 ) and the join t pr o bability density ( on X n ) of x 1 , ..., x n , con di- tional on their corr espon ding lab els ℓ 1 , ..., ℓ n , by p ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) , π ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) w ( { ℓ 1 , ..., ℓ n } ) (18) For n = 0 , we d efine w ( ∅ ) , π ( ∅ ) an d p ( ∅ ) , 1 . It is implicit that p ( X ) is defined to be zero when ev er w ( L ( X )) is zero . Consequen tly , the labeled mu lti-object density can be expressed as π ( X ) = w ( L ( X )) p ( X ) (19) 4 Remark 1 . Note that P L ∈F ( L ) w ( L ) = 1 , and since π is symmetric in its argu ments it fo llows from Lemma 1 that w ( · ) is also symmetr ic in ℓ 1 , ..., ℓ n . Hence w ( · ) is indeed a probab ility distribution on F ( L ) . Lemma 1. Let f : ( X × Y ) n → R b e symmetric. Then g : X n → R given by g ( x 1 , ..., x n ) = ˆ f (( x 1 , y 1 ) , ..., ( x n , y n )) d ( y 1 , ..., y n ) is also symmetric o n X n . Pr oo f: L et σ b e a permutation o f { 1 , ..., n } , th en g ( x σ (1) , ..., x σ ( n ) ) = ˆ f (( x σ (1) , y σ (1) ) , ..., ( x σ ( n ) , y σ ( n ) )) d ( y σ (1) , ..., y σ ( n ) ) = ˆ f (( x 1 , y 1 ) , ..., ( x n , y n )) d ( y σ (1) , ..., y σ ( n ) ) = ˆ f (( x 1 , y 1 ) , ..., ( x n , y n )) d ( y 1 , ..., y n ) where the last step follows from the fact th at the order of integration is interc hangeab le. Proposition 2. Given any lab eled multi-ob ject density π , the δ -GLMB density in the class defined by (1 4) which preser ves the cardinality distribution and P HD of π , and minimizes the K u llback-Leibler diver gence fr om π , is given by ˆ π ( X ) = ∆( X ) X I ∈F ( L ) ˆ w ( I ) δ I ( L ( X )) h ˆ p ( I ) i X (20) wher e ˆ w ( I ) = w ( I ) , (21) ˆ p ( I ) ( x, ℓ ) = 1 I ( ℓ ) p I −{ ℓ } ( x, ℓ ) , (22) p { ℓ 1 ,...,ℓ n } ( x, ℓ ) = ˆ p ( { ( x, ℓ ) , ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) . ( 23) Remark 2 . Note from the definition of ˆ p ( I ) ( x, ℓ ) in (22) that ˆ p ( { ℓ,ℓ 1 ,...,ℓ n } ) ( x, ℓ ) = ˆ p ( { ( x, ℓ ) , ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) (24) Hence, ˆ p ( { ℓ 1 ,...,ℓ n } ) ( · , ℓ i ) , i = 1 , ..., n , defined in (22) are the marginals o f the lab el-conditio ned joint de nsity p ( { ( · , ℓ 1 ) , ..., ( · , ℓ n ) } ) of π . Proposition 2 states that replacin g the lab el-cond itioned joint densities, of a labeled multi-o bject density π , by the produ cts of their marginals yields a δ -GLM B o f the f orm (1 4), which min imises the Kullback -Leibler div ergence from π , an d matches its PHD and ca rdinality distrib ution. Pr oo f: Since p { ℓ 1 ,...,ℓ n } ( x, ℓ ) is symmetric in ℓ 1 , ..., ℓ n , via Lemm a 1, ˆ p ( I ) ( x, ℓ ) is indee d a fun ction of the set I . The pr oof uses the fact (14) ca n b e rewritten as ¯ π ( X ) = ¯ w ( L ( X )) ¯ p ( X ) where ¯ w ( L ) = ¯ w ( L ) , ¯ p ( X ) = ∆( X ) h ¯ p ( L ( X )) i X . T o show that ˆ π preserves the cardinality o f π , observe that the c ardinality distrib ution of any labe led RFS is completely determined by the jo int existence p robabilities of the lab els w ( · ) , i. e. ρ ( n ) = 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n ˆ w ( { ℓ 1 , ..., ℓ n } ) × p ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) = X L ⊆ L δ n ( | L | ) w ( L ) Since both ˆ π and π h av e the same joint existence probabilities, i.e. ˆ w ( L ) = ˆ w ( L ) = w ( L ) , the ir cardinality distributions a re the same. T o sh ow tha t the PHDs of ˆ π and π are the sam e, note from (16) that the PHD of ˆ π can be expanded as ˆ v ( x, ℓ ) = ∞ X n =0 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n ˆ w ( { ℓ,ℓ 1 ,...,ℓ n } ) ˆ p ( { ℓ,ℓ 1 ,...,ℓ n } ) ( x, ℓ ) = ∞ X n =0 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n w ( { ℓ , ℓ 1 , ..., ℓ n } ) × ˆ p ( { ( x, ℓ ) , ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) where the last step follows by substitutin g (21) an d (24). The right hand side of the above equation is the set integral ´ π ( { ( x, ℓ ) } ∪ X ) δ X . Hence ˆ v ( x, ℓ ) = v ( x, ℓ ) . The Kullback-Leibler divergence fr om π and any δ -GLMB of the form ( 14) is gi ven by D K L ( π ; ¯ π ) = ˆ log w ( L ( X )) p ( X ) ¯ w ( L ( X )) ¯ p ( X ) w ( L ( X )) p ( X ) δ X = ∞ X n =0 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n log w ( { ℓ 1 , ..., ℓ n } ) ¯ w ( { ℓ 1 , ..., ℓ n } ) × w ( { ℓ 1 , ..., ℓ n } ) ˆ p ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) + ∞ X n =0 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n ˆ log p ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) Q n i =1 ¯ p ( { ℓ 1 ,...,ℓ n } ) ( x i , ℓ i ) × w ( { ℓ 1 , ..., ℓ n } ) p ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) Noting that p ( { ( · , ℓ 1 ) , ..., ( · , ℓ n ) } ) integrates to 1, we have D K L ( π ; ¯ π ) = D K L ( w ; ¯ w ) + ∞ X n =0 1 n ! X ( ℓ 1 ,...,ℓ n ) ∈ L n w ( { ℓ 1 , ..., ℓ n } ) × D K L p ( { ( · , ℓ 1 ) , ..., ( · , ℓ n ) } ); n Y i =1 ¯ p ( { ℓ 1 ,...,ℓ n } ) ( · , ℓ i ) ! Setting ¯ π = ˆ π we hav e D K L ( w ; ˆ w ) = 0 since ˆ w ( I ) = w ( I ) . Moreover , for each n and each { ℓ 1 , ..., ℓ n } , ˆ p ( { ℓ 1 ,...,ℓ n } ) ( · , ℓ i ) , i = 1 , ..., n , ar e the marginals of p ( { ( · , ℓ 1 ) , ..., ( · , ℓ n ) } ) . Hence, it follows from [57] th at eac h Kullback- Leibler div er- gence in the above sum is minimiz ed. Theref ore, D K L ( π ; ˆ π ) is minimized over the class of δ -GLMB of the f orm (14). 5 The cardinality a nd PHD matchin g st rategy in the above Proposition can be read ily extended to the ap proxima tion of any lab eled multi-object den sity o f the form π ( X ) = ∆( X ) X c ∈ C w ( c ) ( L ( X )) p ( c ) ( X ) (25) where the w eights w ( c ) ( · ) satisfy (4) an d ˆ p ( c ) ( { ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) = 1 (26) by approximating each p ( c ) ( { ( · , ℓ 1 ) , ..., ( · , ℓ n ) } ) by the product of its m arginals. This is a better approximatio n than directly applying Pr oposition 2 to (25), which only approxim ates the label-cond itioned joint densities of (25 ). Howe ver, it is difficult to establish any re sults on the Kullback-Le ibler div ergence for this more general cla ss. Proposition 3. Given an y labeled multi-object density o f the form (25) a δ -GLMB which pr eserves the car d inality distribution an d the PHD of π is given by ˆ π ( X ) = ∆( X ) X ( c,I ) ∈ C ×F ( L ) δ I ( L ( X )) ˆ w ( c,I ) h ˆ p ( c,I ) i X (27) wher e ˆ w ( c,I ) = w ( c ) ( I ) , (28) ˆ p ( c,I ) ( x, ℓ ) = 1 I ( ℓ ) p ( c ) I −{ ℓ } ( x, ℓ ) , (29) p ( c ) { ℓ 1 ,...,ℓ n } ( x, ℓ ) = ˆ p ( c ) ( { ( x, ℓ ) , ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) d ( x 1 , ..., x n ) . (30 ) The proof follows along the same lin es as Proposition 2. Remark 3 . No te that in [49, Sec. V] a δ -GLMB was p roposed to app roximate a p articular family o f labeled RFS densities that a rises from multi-target filter ing with merged measur e- ments. Our results sho w that the ap proxim ation used in [49, Sec. V] p reserves the card inality d istribution and the PHD. In multi-obje ct track ing, th e ma tching of the cardin ality distribution an d PHD in Pro position 2 is a strong er r esult than simply matching the PHD alon e. Notice that this prop erty does not hold for the LMB filter, as shown in [53] (Section III) , due to the im posed multi-Bernou lli parameterization of the cardinality distribution. I V . A P P L I C A T I O N T O M U LT I - TA R G E T T R AC K I N G In this section we propose a multi-target trackin g filter for generic measuremen t models by apply ing the GLMB approx imation result of Prop osition 2. Specifically , we present the p rediction and update o f the Bayes m ulti-target filter (32)- (33) fo r the standard multi-target dynam ic model as well as a generic measurement model. A. Multi-tar get F iltering Follo wing [39], [ 40], to ensur e distinct labels we assign each target an o rdered p air of integers ℓ = ( k , i ) , where k is the time of birth and i is a un ique in dex to d istinguish targets born at the sam e time . The label space for ta rgets b orn at time k is denoted by L k , and the label space for targets at time k (includin g those born prior to k ) is denoted as L 0: k . No te tha t L k and L 0: k − 1 are disjoint and L 0: k = L 0: k − 1 ∪ L k . A mu lti-target state X k at time k , is a finite subset of X = X × L 0: k . Similar to the standard state space mo del, the multi-target system mod el ca n be sp ecified, fo r each time step k , via the multi-target transition density f k | k − 1 ( ·|· ) and th e multi-tar get lik elihood functio n g k ( ·|· ) , using the FISST notion of inte gration/d ensity . T he multi-tar get posterior density (or simply multi-target posterior ) conta ins all inf ormation o n the multi-target states g i ven the measur ement history . Th e multi-target posterior rec ursion generalizes d irectly from th e posterior recu rsion for vector-v alued states [58], i.e. for k ≥ 1 π 0: k ( X 0: k | z 1: k ) ∝ g k ( z k | X k ) f k | k − 1 ( X k | X k − 1 ) π 0: k − 1 ( X 0: k − 1 | z 1: k − 1 ) , (31 ) w here X 0: k = ( X 0 , ..., X k ) is the multi-target state h istory , and z 1: k = ( z 1 , ..., z k ) is the measurement history with z k denoting th e measure ment at tim e k . T arget trajecto ries or tracks are accommoda ted in this formu lation th rough the inclusion of a distinct label in the target’ s state vector [3], [39], [51], [59]. The multi-target p osterior (31) then co ntains all infor mation on the rando m finite set of track s, given th e measuremen t history . In this work we are in terested in the multi-targ et filtering density π k , a marginal o f th e multi-target p osterior, which can be pr opagated forward recursively by the multi- tar get Bayes filter [3], [34] π k ( X k | z k ) = g k ( z k | X k ) π k | k − 1 ( X k ) ´ g k ( z k | X ) π k | k − 1 ( X ) δ X , (32) π k +1 | k ( X k +1 ) = ˆ f k +1 | k ( X k +1 | X ) π k ( X | z k ) δ X , (33 ) where π k +1 | k is the multi-tar get prediction d ensity to time k + 1 (the d ependen ce on the d ata is omitted for c ompactne ss). An an alytic so lution to the multi-target Bayes filter for labeled states and track e stimation fro m the multi-target filtering density is given in [39]. Note that a large v o lume of work in multi-target tracking is based o n filtering , and often the term "mu lti-target p osterior" is used in place of "multi-target filtering density". In this work we shall not distinguish between the filtering d ensity and the posterior d ensity . B. Update In this sectio n w e ap ply the pr oposed δ -GLMB approx - imation to multi-target tracking with a gener ic measurement model. W e do not assume any p articular structure for the multi- target likelihood fu nction g ( ·|· ) and hence the appro ach in this section is a pplicable to any measurem ent m odel in cluding point detections, sup erpositional sensors and impr ecise mea- surements [3], [60]. If th e multi-target pr ediction den sity is a δ -GLMB of the form π k | k − 1 ( X ) = ∆( X ) X I ∈F ( L 0: k ) δ I ( L ( X )) w ( I ) k | k − 1 h p ( I ) k | k − 1 i X , (34 ) 6 then the multi-target posterior density (32) becomes π k ( X | z k ) = ∆( X ) X I ∈F ( L 0: k ) δ I ( L ( X )) w ( I ) k ( z k ) p ( I ) k ( X | z k ) , (35) where w ( I ) k ( z k ) ∝ w ( I ) k | k − 1 η z k ( I ) , (36) p ( I ) k ( X | z ) = g ( z k | X )[ p ( I ) k | k − 1 ] X /η z k ( I ) , (37) η z k ( { ℓ 1 , ..., ℓ n } ) = ˆ g ( z k |{ ( x 1 , ℓ 1 ) , ..., ( x n , ℓ n ) } ) × n Y i =1 p ( { ℓ 1 ,...,ℓ n } ) k | k − 1 ( x i , ℓ i ) d ( x 1 , ..., x n ) . (38 ) Note from (37) tha t after the u pdate each multi-o bject exponential [ p ( I ) k | k − 1 ] X from the prior δ -GLM B becomes p ( I ) k ( X | z k ) , whic h is n ot necessarily a multi-o bject exponen- tial. Hence, in ge neral, (35) is no t a GLMB den sity . 1) Separable Lik elihood: I f targets are well separated in the measuremen t space, we can approximate the likelihood by a separable one, i.e. g ( z k | X ) ≈ γ X z k , and obtain an ap proxim ate GLMB posterior from Proposition 1 : ˆ π k ( X | z k ) = ∆( X ) X I ∈F ( L 0: k ) δ I ( L ( X )) ˆ w ( I ) k ( z k ) h ˆ p ( I ) k ( ·| z k ) i X , (3 9) where ˆ w ( I ) k ( z k ) ∝ w ( I ) k | k − 1 [ η z k ] I , (40) ˆ p ( I ) k ( x, ℓ | z k ) = p ( I ) k | k − 1 ( x, ℓ ) γ z k ( x, ℓ ) /η z k ( ℓ ) , (41) η z k ( ℓ ) = D p ( I ) k | k − 1 ( · , ℓ ) , γ z k ( · , ℓ ) E . (42) 2) General Case: If instead targets a re closely spaced, the separable likelihoo d assumption is violated, the n it b ecomes necessary to directly appro ximate the multi- target posterior in (35) which can be rewritten as: π k ( X | z k ) = w ( L ( X )) k ( z k )∆( X ) p ( L ( X )) k ( X | z k ) (43) It follows from Pr oposition 2 th at an a pprox imate δ -GLM B of the form ( 14), wh ich match es the cardinality and PHD o f the above multi-target posterior, as well as m inimizing the Kullback-Leibler d iv ergence from it, is given by ˆ π k ( X | z k ) = ∆( X ) X I ∈F ( L 0: k ) δ I ( L ( X )) w ( I ) k ( z k ) h ˆ p ( I ) k ( ·| z k ) i X , (4 4) where for ea ch label set I = { ℓ 1 , ..., ℓ n } , the d ensi- ties ˆ p ( { ℓ 1 ,...,ℓ n } ) k ( · , ℓ i | z k ) , i = 1 , ..., n are the margin als of p ( { ℓ 1 ,...,ℓ n } ) k { ( · , ℓ 1 ) , ..., ( · , ℓ n ) }| z k ) . Notice that we retain ed the weights w ( I ) k ( z k ) , giv en by (36), from the true posterior ( 35). C. Pr ediction The standard multi-target dy namic m odel is described as follows. Gi ven the cu rrent multi-target state X ′ , each state ( x ′ , ℓ ′ ) ∈ X ′ either continu es to exist at the n ext time step with probab ility p S ( x ′ , ℓ ′ ) and ev o lves to a new state ( x, ℓ ) with pro bability d ensity f k +1 | k ( x | x ′ , ℓ ′ ) δ ℓ ( ℓ ′ ) , or d ies with probab ility 1 − p S ( x ′ , ℓ ′ ) . Th e multi-target state at the next time is the sup erposition of sur viving and new born targets. The set of new targets born at th e next time step is distributed accordin g to a birth density f B on F ( X × L k +1 ) , giv en by f B ( Y ) = ∆( Y ) w B ( L ( Y )) [ p B ] Y (45) This birth mo del covers labeled Poisson, labeled II D cluster and LMB. W e use an LMB birth model with w B ( L ) = Y i ∈ L k 1 − r ( i ) B Y ℓ ∈ L 1 L k ( ℓ ) r ( ℓ ) B 1 − r ( ℓ ) B , (46) p B ( x, ℓ ) = p ( ℓ ) B ( x ) . (47) Follo wing [39], if th e current multi-target po sterior has the following δ - GLMB f orm π k ( X ) = ∆( X ) X I ∈F ( L 0: k ) δ I ( L ( X )) w ( I ) k h p ( I ) k i X , (48) then the m ulti-target pr ediction (33) is also a δ -GLMB: π k +1 | k ( X ) = ∆( X ) X I ∈F ( L 0: k +1 ) δ I ( L ( X )) w ( I ) k +1 | k h p ( I ) k +1 | k i X (49) where w ( I ) k +1 | k = w ( I ) S ( I ∩ L 0: k ) w B ( I ∩ L k +1 ) , w ( I ) S ( L ) = [ η ( I ) S ] L X J ⊆ L 0: k 1 J ( L )[1 − η ( I ) S ] J − L w ( I ) k ( J ) , p ( I ) k +1 | k ( x, ℓ ) = 1 L 0: k ( ℓ ) p ( I ) S ( x, ℓ ) + (1 − 1 L 0: k ( ℓ )) p B ( x, ℓ ) , p ( I ) S ( x, ℓ ) = D p S ( · , ℓ ) f k +1 | k ( x |· , ℓ ) , p ( I ) k ( · , ℓ ) E η ( I ) S ( ℓ ) , η ( I ) S ( ℓ ) = D p S ( · , ℓ ) , p ( I ) k ( · , ℓ ) E . T he ab ove Eqs. explicitly describe the calculatio n of the parameters of the predicte d multi-ta rget de nsity from the parameters of th e previous multi-target den sity [40]. V . N U M E R I C A L R E S U LT S In this section we verify the propo sed GLMB approxim ation technique via an application to recursiv e multi-target tracking with radar p ower measurem ents. T arget track ing is usually perfor med on da ta that have been preprocessed into p oint measuremen ts or detections. The bulk o f m ulti-target track ing algorithm s in the literatur e are d esigned for this type of data [3], [1 2], [ 61], [6 2]. Compr essing inform ation from the raw measuremen t into a fin ite set of poin ts is very effectiv e for a wide rang e of applications. Howe ver, for application s with lo w SNR, this appro ach may not be adequa te as the information loss incurre d in the compression b ecomes significant. Conse- quently , it become s necessary to make use of all info rmation contained in th e pre-detection measur ements, wh ich in turn requires more advanced sen sor models a nd algorithms. W e first d escribe the single- target dynamic mod el and multi-target measure ment eq uation used to simulate the radar power measure ments. W e then repor t num erical r esults for the separable likelihood approximation an d GLMB posterior ap- proxim ation. T hroug hout this section our recursive multi-target tracker is implem ented with a p article filter appro ximation [58], [63] o f the GLMB d ensity gi ven in [40]. 7 A. Dynamic Model The kin ematic part of th e single-target state x k = ( x k , ℓ k ) at time k comp rises the plan ar po sition, velocity vectors in 2D Cartesian c oordin ates, and the un known m odulus of the target complex amplitude ζ k , respectively , i.e. x k = [ p x,k , ˙ p x,k , p y ,k , ˙ p y ,k , ζ k ] T . A Nearly Constant V elocity (NCV) model is used to describ e the target dynam ics, while a zero- mean Gau ssian rando m walk is used to model the fluctuation s of the target complex a mplitude, i.e. x k +1 = F x k + v k , v k ∼ N (0 ; Q ) where F = diag ( F 1 , F 1 , 1 ) , Q = d iag ( q Q 1 , q Q 1 , a ζ T s ) , F 1 = 1 T s 0 1 , Q 1 = " T 3 s 3 T 2 s 2 T 2 s 2 T s # with T s , q , and a ζ denoting the radar samplin g time, th e power spe ctral d ensity of th e proce ss n oise, and the amplitude fluctuation in linear d omain, respectiv ely . B. TBD Measur ement Eq uation A target x ∈ X illuminates a set of cells C ( x ) , usually re- ferred to as the tar get templa te . A radar positioned at the Carte- sian origin co llects a vector m easurement z = [ z (1) , ..., z ( m ) ] consisting of the power signal r eturns z ( i ) = | z ( i ) A | 2 , w here z ( i ) A = X x ∈ X 1 C ( x ) ( i ) A ( x ) h ( i ) A ( x ) + w ( i ) is the complex signal in cell i , with: • w ( i ) denoting zero-mean white circularly symmetric com- plex Gau ssian n oise with v ariance 2 σ 2 w ; • h ( i ) A ( x ) denoting the point spread fun ction value in cell i from a ta rget with state x h ( i ) A ( x ) = exp − ( r i − r ( x )) 2 2 R − ( d i − d ( x )) 2 2 D − ( b i − b ( x )) 2 2 B where R , D , B are r esolutions for range, Doppler, bear- ing; r ( x ) = q p 2 x + p 2 y , d ( x ) = − ( ˙ p x p x + ˙ p y p y ) /r ( x ) , b ( x ) = atan 2 ( p y , p x ) are r ange, Do ppler, be aring, g iv en the target state x ; and r i , d i , b i are cell c entroids; • A ( x ) d enoting the comp lex echo o f tar get x , which for a Swerling 0 mo del is co nstant in modulus A ( x ) = ¯ Ae j θ , θ ∼ U [0 , 2 π ) . Let ˆ z ( i ) = | ˆ z ( i ) A | 2 be th e no iseless power return in cell i , where ˆ z ( i ) A = X x ∈ X 1 C ( x ) ( i ) ¯ Ah ( i ) A ( x ) . The measurem ent z ( i ) in each cell f ollows a n on-cen tral chi- squared distribution with 2 degrees of f reedom an d no n- centrality parameter ˆ z ( i ) A , and simplifies to a centr al ch i- squared distribution with 2 degrees of f reedom when ˆ z ( i ) A = 0 . Consequently , the likelihood ra tio f or cell ( i ) is given by: ℓ ( z ( i ) | X ) = exp − 0 . 5 ˆ z ( i ) I 0 p z ( i ) ˆ z ( i ) (50) where I 0 ( · ) is the mo dified Bessel fu nction, which ca n be ev alu ated u sing the approximatio n g iv en in [64]. Giv en a vector measur ement z the lik elihood fu nction of the multi-target state X takes th e form g ( z | X ) ∝ Y i ∈ ∪ x ∈ X C ( x ) ℓ ( z ( i ) | X ) , (51) Notice that eqs. (5 0)-(51) cap ture the superpositional nature of the power returns for each m easuremen t bin due to the possibility of clo sely sp aced targets target, i.e. overlapping target templates. Th e separable likelihood assumption is ob - tained from eqs. ( 50)-(51) by assumin g th at a t mo st o ne target contributes to the power retur n fr om each c ell ( i ) , ˆ z ( i ) = | ˆ z ( i ) A | 2 = ( | ¯ Ah ( i ) A ( x ) | 2 , ∃ x ∈ X : i ∈ C ( x ) 0 , otherwise In the n umerical examples we use 1 0 log ¯ A 2 / (2 σ 2 w ) as the signal-to-n oise r atio (SNR) definition, and cho osing σ 2 w = 1 implies ¯ A = √ 2 · 10 S N R/ 10 . T able I C O M M O N P A R A M E T E R S U S E D I N S I M U L A T I O N S Parame ter Symbol V alue Signal-t o-Noise Ratio SNR 7 dB Po wer Spectral Density q 3 m 2 / s 3 Amplitude Fluctuation a ρ 1 1 st Birth Point Coordinat es x 1 B [1250 , − 10 , 1000 , − 10] 2 nd Birth Point Coordinates x 2 B [1000 , − 10 , 1250 , − 10] 3 r d Birth Point Coordinates x 3 B [1250 , − 10 , 1250 , − 10] Birth Probabil ity P B 0 . 01 Survi v al Probabilit y P S 0 . 99 n ◦ of particles per targe t N p 1000 T able II S E PA R A B L E L I K E L I H O O D P A R A M E T E R S Parame ter Symbol V alue Range Resolution R 5 m Azimuth Resoluti on B 1 ◦ Doppler Resolut ion D 1 m / s Sampling Ti me T s 2 s Birth Cov ariance Q B diag ([25 , 4 , 25 , 4]) C. Se parable Likelihood Results In this section we rep ort simulation results fo r a radar TBD scenario u nder the separable likelihood assump tion, which is valid when targets do not overlap at any time. This implies that the birth density is relatively informative co mpared to the targets kin ematics. This ap parently obvious req uirement is necessary to avoid a b ias in th e estimated number of targets due to new target o r b irth h ypothe ses which a lw ays vio late the separable likelihood assumptio n. The considered scen ario is depicted in Fig. 1: we have a time varying numb er of targets due to various births and deaths with a maximum of 5 targets present mid scen ario. The par ameters are rep orted in T ables I and II. Fig. 2 shows the estimation resu lts f or a single tr ial along the x and y coordin ates, an d Fig. 3 sh ows th e Monte Carlo results for the estimated nu mber of targets and po sitional OSP A distance. Notice that the average estimated num ber of targets slightly differs from th e tr ue n umber d ue to clo sely sp aced targets ( see Fig. 1), b ut the overall perfo rmance is satisfactory given the low SNR of 7 dB. 8 700 800 900 1000 1100 1200 1300 500 600 700 800 900 1000 1100 1200 1300 C oo rd in a te x ( m ) C o o r d in at e y ( m) S ta rt Poi n t En d Po i n t T ra ject o r ies Est im a tes Fig. 1. Sepa rable lik eliho od scenario. T arge ts appear from the top right corner and move closer to the radar positioned at the Cartesian origin. 2 4 6 8 10 12 14 16 18 20 700 800 900 1000 1100 1200 1300 S im u l a ti o n S ca n (n ) x - co o rd i n a t e ( m ) T ra jecto ri es Esti m a t es 2 4 6 8 10 12 14 16 18 20 400 600 800 1000 1200 1400 S im u l a ti o n S ca n (n ) y -co o rd i n a te (m ) Fig. 2. Separable like lihood scenario. Estimated traje ctorie s along the x and y coordina tes. D. Non -Sepa rable Likelihood Results In this section we consider a m ore difficult rad ar TBD scenario where the separable likelihood assumption w ould lead to a bias on the estimated numb er of targets. Fig. 4 shows a time varying numb er of targets due to various births and deaths with a max imum of 7 targets present mid scen ario. Fig. 5 sh ows r ange-azim uth, range-Do ppler, a nd azimu th-Dopp ler maps of the receiv ed power returns. No tice th at fo r each 2D map, the index of the 3 r d coordin ate is such that all maps refer to the sam e grou p of targets. Specifically , the target reflection around ( 1500 m, 0 . 8 ◦ , 18 m/s) is due to tw o targets in the same Radar cell. This leads to the so-called unr esolved target prob lem, which u sually results in track lo ss when using a standar d detection b ased app roach or a separable likelihood assumption. The param eters u sed in simulation ar e r eported in T ables I and III. 2 4 6 8 10 12 14 16 18 20 0 5 10 15 20 25 30 S im ula tio n Sc an ( n ) O S P A D ist . ( m ) 2 4 6 8 10 12 14 16 18 20 0 1 2 3 4 5 6 S im ula tio n Sc an ( n ) n ◦ o f T a rg e ts T rue Nu m be r E s t im a te d Nu m be r E s t . n ◦ ± st d . d ev . Fig. 3. Separable likelihoo d scenario. Monte Carlo resul ts for estimated number of targets (top) and the OSP A distance (bottom) with cut-of f c = 50 m T able III N O N - S E PA R A B L E L I K E L I H O O D P A R A M E T E R S Parame ter Symbol V alue Range Resolution R 20 m Azimuth Resoluti on B 2 ◦ Doppler Resolut ion D 2 m / s Sampling Ti me T s 1 s Birth Cov ariance Q B diag ([400 , 100 , 400 , 100]) The estimation results for a sin gle trial a long the x and y coordin ates are shown in Fig . 6, and the Monte Carlo results for the estimated num ber of targets a nd positional OSP A error is shown in Fig. 7. The r esults demon strate that the propo sed GLMB appr oximation exhibits satisfactory tracking perfor mance. 400 600 800 1000 1200 1400 400 500 600 700 800 900 1000 1100 1200 1300 1400 C oo rd in a te x ( m ) C o o r d in a t e y (m ) Fig. 4. Non-separable likel ihood scenari o. T ar gets appea r from the top right corner and move closer to the radar positione d at the Cartesian origin. 9 Fig. 5. Non-separabl e likeliho od s cenari o. Range-Azi muth, Range -Doppler , and Azimuth-Doppler maps at time in stant k = 19 . Idea l or noiseless measurement ( right column ), and noi sy measurement ( left co lumn ). Notice that for each 2D map, the index of the 3 r d coordina te is such that all maps refer to the same group of targets. Specifically , the targe t reflection around ( 1500 m, 0 . 8 ◦ , 18 m/s) is due to two targ ets in the s ame Radar cell. V I . C O N C L U S I O N S This pap er has pro posed a tractable class of GLMB ap - proxim ations fo r labeled RFS densities. In particular, we derived from this class of GLMBs an a pprox imation that can capture the statistical de penden ce between targets, p reserves the card inality d istribution a nd the PHD, as w ell as m inimizes the Kullback-Leibler div ergence. The result h as par ticular significance in multi-target tracking since it leads to tractable recursive filter implem entations with formal track estimates for a wide rang e of n on-stand ard mea surement mod els. A radar based TBD example with low SNR and a time varying number o f closely spaced targets was presented to verify the theoretical result. Th e key result presented in Section III is not only impo rtant to recursive multi-target filtering but is also generally applicable to statistical estimation p roblems in volving point processes o r rando m finite sets. R E F E R E N C E S [1] N. Cressie, Statistics for Spatial Data . John Wile y & Sons, 1993. [2] P . Diggle, Statistical Analysis of Spati al P oint P atterns, 2nd edition . Arnold Publishers, 2003. [3] R. Mahle r , Statistic al Multisou rc e-Mult itar get Informat ion Fusion . Artech H ouse, 2007. [4] ——, Advances in Statisti cal Multisour ce-Mu ltita rg et Information Fu- sion . Artech House, 2014. [5] K. Drall e and M. Rudemo, “Auto matic estimati on of indi vidual tree positions from aerial photos, ” Can. J . F orest Res , vol. 27, pp. 1728– 1736, 1997. [6] J. Lund and M. Rudemo, “Models for point processe s observed with noise, ” Biometrika , vol. 87, no. 2, pp. 235–249, 2000. [7] J. Moll er and R. W aagepeterson, “Modern Stat istic s for Spatial Point Processes, ” Scandinavia n Journal of Stati stics , vol. 34, pp. 643–684, 2006. [8] L. W aller and C. Gotwa y , Applied Spatial Statistics for Public Health Data . John Wile y & Sons, 2004. [9] F . Baccelli , M. Klein, M. Lebourges, and S. Zuyev , “Stocha stic geom- etry and archite cture of communic ation networks, ” T elecommunic ation Systems , vol. 7, no. 1-3, pp. 209–227, 1997. 0 5 10 15 20 25 30 35 40 45 50 400 600 800 1000 1200 1400 S im ula t ion Sc an ( n ) x -c oo rdin at e ( m ) T raje c t orie s E s t ima t e s 0 5 10 15 20 25 30 35 40 45 50 400 600 800 1000 1200 1400 S im ula t ion Sc an ( n ) y -c oo rdin at e ( m ) Fig. 6. Non-sepa rable likelih ood scenario.Estimat ed traject ories along the x and y coordinate s. 5 10 15 20 25 30 35 40 45 50 0 10 20 30 S im ula tio n Sc an ( n ) O S P A D ist . (m ) 5 10 15 20 25 30 35 40 45 50 0 2 4 6 8 10 S im ula tio n Sc an ( n ) n ◦ o f T a rg e ts T rue Nu m be r E s t im a te d Nu m be r E s t . n ◦ ± st d . d ev . Fig. 7. N on-separa ble like lihood scenari o. Monte Carl o result s for estimated number of ta rge ts (top) and the OSP A distance (bottom) with cut-o f f c = 50 m. [10] M. Haenggi, “On distances in uniformly random networks, ” IE EE T rans. Inf. Theory , vol. 51, no. 10, pp. 3584–3586, 2005. [11] M. Haenggi, J . Andrews, F . Baccelli, O. Dousse, and M. Francesche tti, “Stocha stic geometry and random graphs for the analysis and design of wireless netw orks, ” IE EE J. Sel . Areas Commun. , vol . 27, no. 7, pp. 1029–1046, 2009. [12] S. Bla ckman and R. Popoli, Design and Analysis of Modern T rackin g Systems . Artech House, 1999. [13] S. Blackman, “Multipl e hypothesis tracking for multiple targe t tracking, ” IEEE T rans. Aerosp. Electr on. Syst. , vol. 19, no. 1, pp. 5–18, Jan 2004. [14] Y . Bar -Shalom and T . Fortmann, T rackin g and Data As sociati on . Aca- demic Press, 1988. [15] A. Baddele y and M. van Lieshout, Computational Statistics . Heidel- berg: Physica/Sprin ger , 1992, vol. 2, ch. ICM for object reco gnition , pp. 271–286. [16] E . Maggi o, M. T aj, and A. Ca valla ro, “Efficie nt multitar get visual tracki ng using random finite sets, ” IEEE T rans. Circui ts Syst. V ideo T echnol. , vol. 18, no. 8, pp. 1016–1027, 2008. [17] R. Hoseinnezha d, B.-N. V o, D. Suter , and B.-T . V o, “V isual tracking of numerous tar gets via multi-Bern oulli filtering of image data, ” P attern Recogn ition , vol. 45, no. 10, pp. 3625–3635, 2012. [18] R. Hoseinnezha d, B.-N. V o, and B.-T . V o, “V isual Tracking in Back- 10 ground Subtract ed Image Sequence s via Multi-Be rnoulli Filtering, ” IEEE Tr ans. Signal Proc ess. , vol. 61, no. 2, pp. 392–397, 2013. [19] J . Mullane, B.-N. V o, M. Adams, and B.-T . V o, “A Random Finite Set Approach to Bayesian SL AM, ” IE EE T rans. Robot. , vol. 27, no. 2, pp. 268–282, 2011. [20] C. L undquist, L. Hammarstrand, and F . Gustafsson, “Road Intensity Based Mapping using Radar Measurements with a Probability Hypoth- esis Density Filter , ” IEE E T rans. Signal P r oce ss. , vol. 59, no. 4, pp. 1397–1408, 2011. [21] C. Lee, D. Clark, and J. Salvi , “SLAM with dynamic targets via single- cluster PHD filtering, ” IEEE J. Sel. T opics Signal Pr ocess. , vol. 7, no. 3, pp. 543–552., 2013. [22] M. Adams, B.-N. V o, R. Mahler , and J. Mullane, “SLAM Gets a PHD: Ne w Concepts in Map Estimation, ” in IEEE Robot. Autom. Mag , 2014, pp. 26–37. [23] G. Bat tistel li, L. Chisci, S. Morroc chi, F . Papi, A. Benav oli, A. Di Lallo, A. Fa rina, an d A. Gra ziano, “T raf fic in tensity estimat ion via PHD filterin g, ” in E ur opean Radar Confere nce , 2008, pp. 340–343. [24] D. Meissner , S. Reu ter , and K. Dietmayer , “Road use r tr acking at intersec tions using a multiple- model PHD filter , ” in Intellig ent V ehicles Symposium (IV), 2013 IE EE , 2013, pp. 377–382. [25] X. Zhang, “ Adapti ve Contr ol and Reconfigurat ion of Mobile W ireless Sensor Networks for Dyn amic Multi-T arget Tracki ng, ” IE EE T rans. Autom. Contr ol , vol. 56, no. 10, pp. 2429–2444, 2011. [26] J . Lee and K. Y ao, “Init iali zati on of multi-Bernoull i Random Finite Sets ov er a sensor tree, ” in Int. Conf. Acoustics, Speec h & Signal Pr oce ssing (ICASSP) , 2012, pp. 25–30. [27] G. Battistel li, L. Chisc i, C. Fant acci, A. Fa rina, and A. Graziano, “Consensus CPHD Filter for Distributed Multitar get T rac king, ” IEEE J . Sel. T opics Signal Proc ess. , vol. 7, no. 3, pp. 508–520, 2013. [28] M. Uney , D. Clark, and S. Julier , “Distrib uted Fusion of PHD Filter s V ia Exponential Mixture Densities, ” IEEE J . Sel. T opics Signal P r oce ss. , vol. 7, no. 3, pp. 521–531, 2013. [29] B. D. Riple y and F . P . Kelly , “Mark ov Point Processes, ” Journal of the London Mathematical Socie ty , vol. 2, no. 1, pp. 188–192, 1977. [30] M. N. M. V an Lieshout , Marko v point pr ocesses and their applic ations . London: Imperial Colle ge Press, 2000. [31] O. Macchi , “The coincidence approac h to stochastic poin t proc esses, ” Advances in A pplied P r obabil ity , vol. 7, pp. 83–122, 1975. [32] A. Soshnik ov , “Determinan tal random point fields, ” Russian Mathemat- ical Surve ys , vol . 55, pp. 923–975, 2000. [33] J . B. Hough, M. Krishnapur , Y . Peres, and B. V irág , Zer os of Gaussian analyti c function s and determinan tal point pr oce sses. Uni versity Lecture Series 51. Pro viden ce, RI: Am erican Mathemati cal Societ y , 2009. [34] R. Mahler , “Multi-t arg et Bayes filtering via first-order multi-tar get moments, ” IE EE T rans. Aer osp. Electr on. Syst. , vol. 39, no. 4, pp. 1152– 1178, 2003. [35] ——, “PHD filt ers of higher order i n targe t number , ” IEEE T rans. Aer osp. Electr on. Syst. , vol. 43(3), pp. 1523–1543, July 2007. [36] B.-T . V o, B. -N. V o, and A. Cantoni , “The Cardinal ity Balance d Multi- targ et Multi-Bernoul li filter and its implementat ions, ” IEEE T rans. Sig. Pr oc. , vol. 57, no. 2, pp. 409–423, 2009. [37] D. Reid, “An algorithm for tracking multiple target s, ” IEEE T ran s. Autom. Contr ol , vol. 24, no. 6, pp. 843–854, 1979. [38] T . K urien, “Issues in the de sign of pract ical m ultit arge t tracking al- gorithms, ” in Multitar get -Multi sensor T rac king: Advanced A pplica tions , Y . Bar-Shal om, E d. Artech House, 1990, ch. 3, pp. 43–83. [39] B.-T . V o and B.-N. V o, “Labeled Random Finite Sets and Multi-Obje ct Conjuga te Priors, ” IEEE T ran s. Sig. Proc. , vol. 61, no. 13, pp. 3460– 3475, 2013. [40] B.-N. V o, B.-T . V o, and D. Phung, “Labele d Random Finite Sets and the Bayes Multi-T arget Track ing Filter, ” IEEE T rans. Sig. Proc . , vol. 62, no. 24, pp. 6554–6567, 2014. [41] Y . Boers and J. Driessen, “Particl e Filter based Detection for T racking , ” in Pr oc. American Contr ol Confer ence , 2001, pp. 4393–4397. [42] D. Salmond and H. Birch, “A particl e filter for track-be fore-det ect, ” in Pr oc. American Contr ol Confer ence , 2001, pp. 3755–3760. [43] B. Ristic, M. Arulampal am, and N. Gordon, “Detection and Tracki ng of Stealthy T arge ts, ” in B e yond the Kalman Fil ter: P article Fi lter s for T racki ng Applications . Artech House, 2004, ch. 11, pp. 239–259. [44] S. Dave y , M. Rutten, and N. Gordon, “Tra ck-Bef ore-Dete ct T echniqu es, ” in Inte grated T rac king , Classification, and Sensor Manag ement: Theory and Application s , M. Mallick, V . Krish namurty , and B.-N. V o, Eds. W ile y/IEEE, 2012, ch. 8, pp. 311–361. [45] M. Boc quel, F . Papi, M. Podt, and Y . Driessen, “Multitar get Tracking W ith Multiscan Knowle dge Exploitati on Us ing Sequential MCMC Sam- pling, ” IE EE J . Sel. T opics Signal P r ocess , vol. 7, no. 3, pp. 532–542, 2013. [46] F . Pa pi, B.-T . V o, M. Bocquel, and B.-N. V o, “Mul ti-ta rget Track-B efore- Detect using labe led random finite set, ” in Contr ol, Automat ion and Informatio n Sciences (ICCAIS), 2013 International Confer ence on , Nov 2013, pp. 116–121. [47] S. Nannur u, M. Coate s, and R. Mahler , “Computa tiona lly-T ract able Approximate PHD an d CPHD Filte rs for Superposit ional Sensors, ” IEE E J . Sel. T opics Signal Proc ess. , vol. 7, no. 3, pp. 410–420, June 2013. [48] R. Mahler and A. El-Falla h, “An approximate CPHD filter for superpo- sitiona l sensors, ” in P r oc. SPIE , vol. 8392, 2012, pp. 83 920K–83 920K– 11. [49] M. Beard, B.-T . V o, and B.-N. V o, “Bayesian Multi-tar get Tracking with Merged Measuremen ts Using Labell ed Random Finite Sets, ” IEEE T rans. Signal Pr ocess. , vol. 63, no. 6, pp. 1433 – 1447, 2015. [50] B.-N. V o, B.-T . V o, N. Pham, and D. Suter , “Joint Detecti on and Estimation of Multi ple Objec ts From Im age Observati ons, ” IEE E T rans. Signal P r ocess. , vol. 58, no. 10, pp. 5129–5241, 2010. [51] I. Goodman, R. Mahler , and H. Nguyen, Mathema tics of Data Fusion . Kluwer Academic Publishers, 1997. [52] B.-N. V o, S. Singh, and A. Doucet, “Sequent ial Monte Carlo methods for Multi-targ et filtering with Random Finite Sets, ” IEE E T rans. Aero sp. Electr on. Syst. , vol. 41, no. 4, pp. 1224–1245, 2005. [53] S. Reuter , B.-T . V o, B.-N. V o, and K. Dietmaye r , “The labelled multi- Bernoull i filter, ” IEEE Tr ans. Signal P r ocess. , vol . 62, no. 12, pp. 3246– 3260, 2014. [54] B.-N. V o, B.-T . V o, S. Reut er , Q. Lam, and K. Diet mayer , “T ow ards larg e scal e multi -tar get track ing, ” in SPIE Defense+ Securit y , vol . 9085, 2014, pp. 90 850W –90 850W –12. [55] R. Georg escu, S. Schoen eck er , and P . Will ett, “GM-CPHD and ML PD A applie d to the SE AB AR07 and TNO-blind multi-static sonar data, ” in Informatio n Fusion (FUSION), 2009 12th Internation al Confer ence on. IEEE , 2009. [56] D. Svensson, J. W inte nby , an d L. Sven sson, “Performance e v aluat ion of MHT a nd GM-CPHD in a ground ta rget t racking scena rio, ” in Informatio n Fusion (FUSION), 2009 12th Internation al Confer ence on. IEEE , 2009. [57] J . Cardoso, “Dependence , correla tion and Gaussianity in independent component analysis, ” J. Mach. Learn. Res. , vol. 4, pp. 1177–1203, 2003. [58] A. Douce t, S. J. Godsill, and C. Andrieu, “On sequential monte carlo sampling methods for baye sian filteri ng, ” Stat. Comp. , vol. 10, pp. 197– 208, 2000. [59] T . V u, B.-N. V o, and R. J. Evans, “A Part icle Margi nal Metropolis- Hastings Multi-t arge t Tra cke r, ” IEEE T rans. Signal Pro cess. , vol . 62, no. 15, pp. 3953 – 3964, 2014. [60] F . Papi , M. Bocquel, M. Podt, and Y . Boers, “Fixed-Lag Smoothing for Bayes Optimal Knowledge Exploita tion in T arget Tracking, ” IEEE T rans. Signal Pr ocess. , vol. 62, no. 12, pp. 3143–3152, 2014. [61] Y . Bar-Shalom, P . K. Will ett, and X. Tian, T racki ng and Data Fusion: A Handbook of A lgorithms . YBS Publishing, 2011. [62] M. Mallick, V . Krishna murthy , and B.-N. V o, Inte grated T racki ng, Classificat ion, and Sensor Mana ge ment: Theory and Applicat ions . Wi- ley /IEEE, 2012. [63] N. Gordon, D. Salmond, and A. Smith, “Nov el approach to nonline ar/non-Ga ussian Bayesia n state estimat ion , ” IEE Proce edings F on Radar and Signal Proce ssing , vol. 140, no. 2, pp. 107–113, 1993. [64] B. Brewster Geelen, “Accurate solution for the modified Bessel function of the first kind, ” Advances in Engineering Software , vol. 23, no. 2, pp. 105–109, 1995.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment