A Kalman Decomposition for Possibly Controllable Uncertain Linear Systems
This paper considers the structure of uncertain linear systems building on concepts of robust unobservability and possible controllability which were introduced in previous papers. The paper presents a new geometric characterization of the possibly c…
Authors: Ian R. Petersen
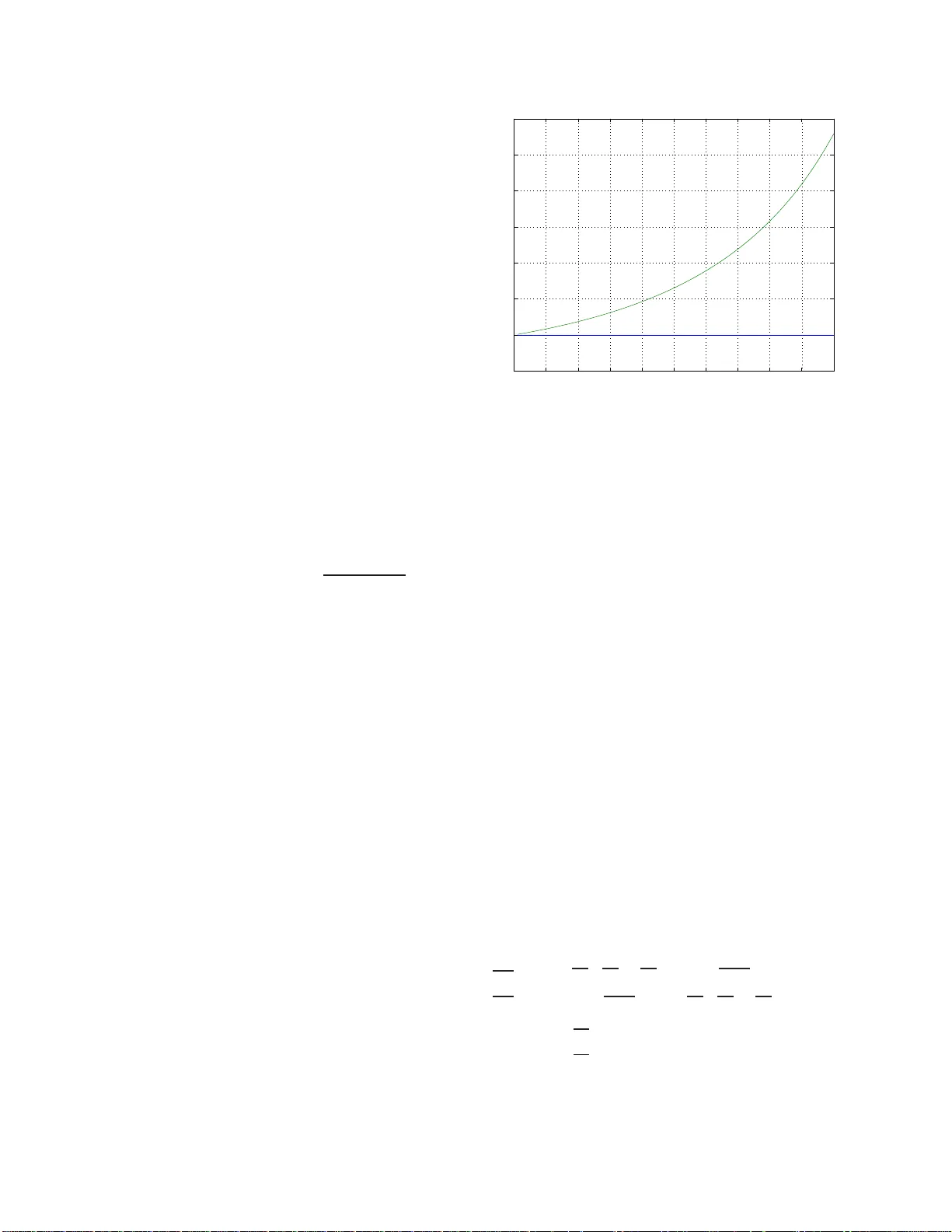
A Kalman D ecomp osition for P ossibly Controllable Uncertain Linear Systems ⋆ Ian R. Petersen ∗ ∗ Scho ol of Engine ering and Information T e chnolo gy, U niversity of New South Wales at the Austr alian Defenc e F or c e A c ademy, Canb err a ACT 2600, Austr alia (e-mail: i.r. p etersen@gmail.c om) Abstract This pap er considers th e structure of uncertain linear systems bu ilding on concepts of robust unobserv abilit y and p ossible contro llabilit y which w ere introdu ced in prev ious pap ers. The p ap er presents a new geometric characteri zation of th e p ossibly contro llable states. When com bined with previous geometric results on robust unobserv ability , the results of this paper lead to a general Kalman type d ecomposition for uncertain linear systems whic h can b e applied to the p roblem of obtaining redu ced order uncertain sy stem mo dels. 1 In tro duction Controllabilit y and observ ability a re fundamental prop- erties of a linear sys tem; e.g., see [1]. This pap er is co n- cerned with extending these notions to the case of un- certain linear sys tems with the aim of gaining gr eater understanding of the s tructure of uncertain linear sys- tems when applied to problems of reduced order mo d- elling and minimal realizatio n. One reaso n for consider ing the issue of controllabilit y for uncertain systems mig h t b e to determine if a robust state feedback cont roller can b e constructed for the sys- tem; e.g., see [2]. In this case, one w ould be in terested in the q uestion of whether the system is “controllable” for all p o ssible v alue s of the uncertaint y; e.g., see [3–8]. Sim- ilarly , one reason for consider ing observ ability for uncer- tain systems might b e to determine if a robust state es- timator can b e constructed for the sy stem; e.g ., se e [9]. In this case, one would b e in terested in the question o f whether th e system is “observ able” for all p ossible v alues of the uncertaint y; e.g., see [10]. Ho wev er, these q ues- tions of r obust controllability and robust obser v ability are not the questions b eing a ddressed in this pap er. F or the case o f linear sy stems, the notions of controlla- bilit y and observ ability are cen tral to realiza tion theory ; e.g., see [1]. F or example, it is known that if a linear ⋆ This w ork w as supp orted by the Au stralian Researc h Council. Preliminary ve rsions of some of the results of t his pap er appeared in the 46th IEEE Conference on Decision and Con trol, New O rleans and the 2008 I F AC W orld Congress , Seoul. system contains unobserv able or uncontrollable states , those states can b e r emov ed in order to o btain a reduced dimension rea liz ation of the system’s transfer function. F r om this point of view, a natural extensio n of the no- tion o f con trolla bility to the ca se of uncertain s ystems, would be to consider “p ossibly con trolla ble ” states which are controllable for so me p ossible v alues of the uncer - taint y . This idea was developed in the pa per [11] for the case of uncerta in linear sys tems with structured uncer- taint y s ub ject to av erag ed in tegral qua dratic constra ints (IQCs). Similarly , a natural e x tension of the notion o f observ abilit y to uncer tain systems is to consider robus tly unobserv able states whic h are “unobs erv a ble ” for all po s- sible v alues of the uncertaint y . This idea was developed in the pap ers [12, 13]. This pa pe r builds o n co ncepts of “r obust unobser v abil- it y and “p ossible c ontrollabilit y” develop ed in the pa- per s [11, 12]. The results presented in the pa per aim to provide insight in to the str ucture of uncertain systems as it relates to questions of r ealization theo r y and re- duced dimensio n modelling for uncertain sy s tems; e.g., see [14–16]. W e formally define notions of robus t unobserv ability and po ssible controllabilit y in terms o f certain constrained optimization problems. The notion of ro bust unobs erv- ability used in this pa per inv olves extending the standard linear systems definition of the observ abilit y Gra mian to the case of uncertain systems; se e also [17]. Also, the no- tion of p os sible controllability used in this pa pe r inv olves extending the standard linear systems definition of the controllabilit y Gramian to the case of uncer tain systems; see also [18]. W e then apply the S-pro cedure (e.g., see [2]) Preprint submitted to Automatica 6 August 2018 to obtain conditions for robust unobserv ability a nd p o s- sible controllability in terms of unconstra ined LQ opti- mal cont rol problems dep endent on Lagrang e m ultiplier parameters as in [11, 12]. F r om this, w e develop a g eo- metric c hara c terization for the set of r obustly unobserv- able states (as in [13]) and the s et of p oss ibly controllable states. The s e ch ara cterizations imply that the set of ro- bustly unobserv able states is in fact a linear subspace. Similarly , we show that the set of p oss ibly co n trollable states is a linear s ubspace; see also [3, 6, 7]. Thes e charac- terizations lead to a Kalman t ype decomp os itio n for the uncertain systems under consider ation; see also [19 ], [2 0] and Theorem 4 .3 in Cha pter 3 of [1]. This decomp osition is describ ed in the four p ossible cases for which an uncer- tain system mo del can have robus tly uno bserv a ble states or s ta tes which are not p ossibly controllable. These are the cases in which a reduced dimensio n uncertain sy s - tem model can b e obtained whic h reta ins the same set of input-output behaviours as the or iginal mo del. As compared to the pr evious pap ers [11–13], the results of this paper enable a complete geometrical picture to b e obtained which can be a pplied to problems of r educed dimension modelling of uncertain linear systems. Also, the results of this pa p er are muc h mor e co mputation- ally tractable than the res ults of the pa per s [11, 12]. The main assumption requir ed in this pap er as compared to the previous papers [11, 12] is the assumption that the uncertaint y is uns tr uctured and des crib ed b y a sing le av eraged uncer taint y co nstraint. The remainder of the pap er pro ce e ds as follows. In Sec- tion 2, the class of uncertain systems under considera- tion is in tro duced and definitions of robust unobser v- ability a nd p oss ible controllability are g iven. In Section 3, the existing g e o metrical results on robust o bs erv a bil- it y ar e summarized. In Sections 4, 5 , 6, our main results on p ossible con trollability ar e g iven. In Section 7, the re- sults a re c o mbin ed to obtain complete Ka lman decom- po sition results and in Section 8, an illustr ative example is given. T he pa per is concluded in Section 9. 2 Problem F o rm ulation W e consider the following linear time inv ariant uncer tain system: ˙ x ( t ) = Ax ( t ) + B 1 u ( t ) + B 2 ξ ( t ); z ( t ) = C 1 x ( t ) + D 1 u ( t ); y ( t ) = C 2 x ( t ) + D 2 ξ ( t ) (1) where x ∈ R n is the state , y ∈ R l is the me asur e d output , z ∈ R h is the u nc ert ainty output , u ∈ R m is the c ontr ol input , and ξ ∈ R r is the u nc ert ainty input . F o r the system (1), w e de fine the transfer function G ( s ) to b e the transfer function from the input ξ ( t ) to the output y ( t ); i.e ., G ( s ) = C 2 ( sI − A ) − 1 B 2 + D 2 . Also, we define the transfer function H ( s ) to b e the transfer function fro m the input u ( t ) to the output z ( t ); i.e., H ( s ) = C 1 ( sI − A ) − 1 B 1 + D 1 . System Unc ertainty. The uncertaint y in the uncerta in system (1) is required to satisfy a certain “Averaged Int egra l Quadr atic Constraint”. Aver age d Inte gr al Quadr atic Constr aint. Let the time in- terv a l [0 , T ], T > 0 be given and let d > 0 b e a giv en po sitive cons tant a s so ciated with the sy stem (1); see also [11, 12, 2 1]. W e will c o nsider sequences o f uncertain ty in- puts S = { ξ 1 ( · ) , ξ 2 ( · ) , . . . ξ q ( · ) } . The num ber of elements q in any such seq uence is ar bitrary . A sequence of uncer - taint y functions of the form S = { ξ 1 ( · ) , ξ 2 ( · ) , . . . ξ q ( · ) } is an admissible unc ertainty s e quenc e for the sys tem (1 ) if the following conditions hold: Given a n y ξ i ( · ) ∈ S and any corresp onding solution { x i ( · ) , ξ i ( · ) } to (1) defined on [0 , T ], then ξ i ( · ) ∈ L 2 [0 , T ], a nd 1 q q X i =1 Z T 0 k ξ i ( t ) k 2 − k z i ( t ) k 2 dt ≤ d. (2) The class of all such a dmiss ible uncertaint y se q uences is denoted Ξ . One wa y in which such uncerta in ty could be generated is v ia unstructured feedback uncertaint y as shown in the blo ck diagr am in Fig. 1. The averaged IQC uncertaint y description was intro- duced in [21] as a n approach to uncertaint y modelling which gives tigh t results in the ca s e of structured uncer- taint y . The pap er [11] gives a more detailed e xplanation concerning the use of the av eraged IQC uncertaint y de- scription. This pap er contin ues to use the av eraged IQC uncertaint y desc r iption even though it does not consider structured uncertainties since it builds on the r esults of [11, 12] which w ere derived using the averaged I Q C un- certaint y des c ription. It should b e possible to re-derive the results of [11 , 12] using the sta ndard rather than av- eraged IQC uncertain ty description such as co nsidered in [2 2]. These results could then b e us e d to obtain results corres p onding to the re sults of this pap er in the ca s e of a standard IQ C uncertaint y description ra ther than an av eraged IQ C uncer taint y description. Definition 1 The r obust unobse rv ability function for the unc ertain system (1), (2) define d on the time interval [0 , T ] is define d as L o ( x 0 , T ) ∆ = sup S ∈ Ξ 1 q q X i =1 Z T 0 k y ( t ) k 2 dt (3) 2 ✲ ✛ ✲ ✲ ∆( · ) u y ξ z Nominal System Fig. 1. U ncertain system blo ck d iagram’. wher e x (0) = x 0 in (1). This definition extends the s tandard definition of the observ abilit y Gramian for linear systems. Notation. D ∆ = { d : d > 0 } . Definition 2 A non-zer o state x 0 ∈ R n is said to b e robustly unobserv able for the un c ertain system (1), (2) define d on the time int erval [0 , T ] if inf d ∈D L o ( x 0 , T ) = 0 . The set of al l r obustly unobservable states for the unc er- tain system (1), (2) define d on the time interval [0 , T ] is r eferr e d to as the robustly unobs erv a ble s et U ; i.e., U ∆ = x ∈ R n : inf d ∈D L o ( x, T ) = 0 . Definition 3 The po s sible co ntrollability function for the unc ertain system (1), (2) define d on the time interval [0 , T ] is define d as L c ( x 0 , T ) ∆ = sup ǫ> 0 inf S ∈ Ξ inf U ∈ L q 2 [0 ,T ] 1 q q X i =1 " k x i ( T ) k 2 ǫ + R T 0 k u i ( t ) k 2 dt # (4) wher e x (0) = x 0 in (1). This definition extends the s tandard definition of the controllabilit y Gramian for linea r sys tems . In par ticular, in the spe cial case of systems without uncertaint y , this quantit y will b e infinite for uncontrollable states x 0 . Definition 4 A non-zer o state x 0 ∈ R n is said to b e po ssibly controllable on [0 , T ] for t he u nc ertain system (1), (2) if sup d ∈D L c ( x 0 , T ) < ∞ . This definition reduces to the definition of co n trollable states for the sp ecial case of systems without uncer - taint y ; e.g ., see [1]. Definition 5 A non-zer o state x 0 ∈ R n is said to b e (different ially) p os sibly controllable for the unc ertain system (1), (2) if it is p ossibly c ontr ol lable on [0 , T ] for al l T > 0 su fficiently smal l. The set of al l differ ential ly p ossibly c ontr ol lable states for the unc ertain system (1), ( 2) is r eferr e d to as the p os s ibly controllable set C . Remark 1 It is emphasize d in [11] that t he notion of p ossibly c ontr ol lability for unc ertain syst ems is an ex ten- sion of the standar d notion of c ont r ol lability in its appli- c ation t o pr oblems of minimal r e alization. In p articular, in t he se quel it wil l b e shown that t he existenc e of st ates which ar e not p ossibly c ont r ol lable in an unc ertain system mo del me ans that a r e duc e d dimension unc ertain system mo del c an b e obtaine d with the same input- output b e- haviour as the original mo del. In this sense, states which ar e n ot p ossibly c ontr ol lable c ontr ol lable c orr esp ond to unc ontr ol lable states in standar d line ar systems the ory; e.g., se e [1]. 3 Existing Results on Robust Unobserv abil it y In this sec tio n, we r ecall some existing r esults from [13 ] giving a g e o metrical characterization of r obust unob- serv abilit y . F o r the uncertain system (1), (2) defined on the time int erv al [0 , T ], we define a function V τ ( x 0 , T ) a s follows: V τ ( x 0 , T ) ∆ = inf ξ ( · ) ∈ L 2 [0 ,T ] Z T 0 −k y k 2 + τ k ξ k 2 − τ k z k 2 dt. (5) Here τ ≥ 0 is a given constant. ¯ Γ( x 0 , T ) ∆ = n τ : τ ≥ 0 and V τ ( x 0 , T ) > − ∞ o . Assumption 1 F or al l x 0 ∈ R n , ther e ex ists a c onstant τ ≥ 0 such t hat V τ ( x 0 , T ) > − ∞ . R emark: The abov e assumption is a technical a ssump- tion r equired to establish the r esults o f [13 ]. It represents an assumption on the size of the uncer taint y in the sys- tem rela tive to the time interv al [0 , T ] under cons idera- tion. In general, this assumption c a n alwa ys be s a tisfied by choosing a sufficient ly s mall T > 0. 3 Theorem 1 (Se e [13] for pr o of ). Consider the un c er- tain system (1), (2) and su pp ose that Assumption 1 is satisfie d. Also, supp ose that G ( s ) ≡ 0 . Then a state x 0 is r obust ly u nobservable if and only if it is an unobservable state for the p air ( C 2 , A ) . R emark: F rom the ab ove theorem a nd the fa c t that G ( s ) ≡ 0, it follows that we can apply the s ta ndard Kalman decomp osition to repre sent the uncertain sys- tem as shown in Fig. 2. u Observable Unobservable + y z z z ξ 1 2 ∆ Fig. 2. Observ able-Unobserv able decomp osition for the u n- certain system when G ( s ) ≡ 0. Note that in this cas e, all of the uncertaint y is in the unobserv able subsystem and the co upling b etw een the t wo subsy s tems. Theorem 2 (Se e [13] for pr o of ). Consider the un c er- tain system (1), (2) and su pp ose that Assumption 1 is satisfie d. Also, supp ose that G ( s ) 6≡ 0 . Then a state x 0 is r obust ly u nobservable if and only if it is an unobservable state for the p air ( " C 1 C 2 # , A ) . R emark: The a bove theo rem implies that whe n G ( s ) 6≡ 0, the r obustly unobserv able set is a linea r spa ce eq ual to the unobserv able subspace of the pair ( " C 1 C 2 # , A ). F rom this theo r em, it follows that we ca n a pply the standard Kalman decomp osition to repre sent the uncertain sys- tem as shown in Fig. 3. In this case , all of the uncertaint y is in the observ able subsystem or in the coupling betw een the t wo subsys- tems. u Unobservable Observable y z ∆ ξ Fig. 3. Observ able-Un observ able d ecomposition for the un - certain system when G ( s ) 6≡ 0. 4 Preliminary Results on P ossibl e Contr olla- bility In this section, we will recall the main results of [11] s pe- cialized to the class of uncertain s ystems with unstruc- tured uncertaint y considered in this pap er. 4.1 A F amily of Unc onstr aine d Optimization Pr oblems. F o r the uncertain system (1), (2) defined on the time interv al [0 , T ], we define functions W ǫ τ ( x 0 , λ, T ), W ǫ τ ( x 0 , T ) and W τ ( x 0 , T ) as follows: W ǫ τ ( x 0 , λ, T ) ∆ = inf [ ξ ( · ) ,u ( · )] ∈ L 2 [ λ,T ] k x ( T ) k 2 ǫ + Z T λ k u k 2 + τ k ξ k 2 − τ k z k 2 dt (6) sub ject to x ( λ ) = x 0 ; W ǫ τ ( x 0 , T ) ∆ = W ǫ τ ( x 0 , 0 , T ); W τ ( x 0 , T ) ∆ = sup ǫ> 0 W ǫ τ ( x 0 , T ) . Here τ ≥ 0 is a given constant. 4.2 A F ormula for the Possible Contr ol lability F unc- tion. Theorem 3 (Se e [11] for pr o of ). Consider the u nc ertain system (1), (2) define d on the time interval [0 , T ] and c orr esp onding p ossible c ontr ol lability function (4). Then for any x 0 ∈ R n , L c ( x 0 , T ) = sup ǫ> 0 sup τ ≥ 0 { W ǫ τ ( x 0 , T ) − τ d } ; = sup τ ≥ 0 { W τ ( x 0 , T ) − τ d } . (7) 4 Corollary 1 ( Se e [11] for pr o of ). If we define ˜ L c ( x 0 , T ) ∆ = sup d ∈D L c ( x 0 , T ) then ˜ L c ( x 0 , T ) = sup ǫ> 0 sup τ ≥ 0 W ǫ τ ( x 0 , T ) = s up τ ≥ 0 W τ ( x 0 , T ) . Observ ation 1 F r om the ab ove c or ol lary, it fol lows im- me diately that a non-zer o state x 0 ∈ R n is (differ en- tial ly) p ossibly c ontr ol lable for t he un c ertain system (1), (2) if and only if sup ǫ> 0 sup τ ≥ 0 W ǫ τ ( x 0 , T ) = s up τ ≥ 0 W τ ( x 0 , T ) < ∞ (8) for al l T > 0 sufficiently smal l. 5 Riccati Equation Solution to the Uncon- strained Optim ization Proble ms In o r der to calcula te W ǫ τ ( x 0 , λ, T ), w e note that if τ > 0, and the optimization pro blem (6) has a finite solution for all initial conditions, then it c a n b e solv ed in terms of the following Riccati differential equation (RDE): − ˙ P ǫ = A ′ P ǫ + P ǫ A − ( P ǫ B 1 − τ C ′ 1 D 1 ) ( I − τ D ′ 1 D 1 ) − 1 ( P ǫ B 1 − τ C ′ 1 D 1 ) ′ − P ǫ B 2 B ′ 2 P ǫ τ − τ C 1 C ′ 1 ; P ǫ ( T ) = I /ǫ (9) which is so lved backw ards in time. Lemma 1 Le t τ > 0 b e such that I − τ D ′ 1 D 1 > 0 . (10) Consider the system ( 1) define d on [0 , T ] and c ost func- tional (6) with λ ∈ [0 , T ) . Then W ǫ τ ( x 0 , λ, T ) > −∞ ∀ x 0 ∈ R n if and only if the RDE ( 9) has a solution P ǫ τ ( t ) define d on [ λ, T ] . In this c ase, W ǫ τ ( x 0 , λ, T ) = x ′ 0 P ǫ τ ( λ ) x 0 . (11) Pr o of. This lemma follows directly from a standar d LQR optimal control r esult; e.g., see pa ge 55 of [2 3]. ✷ In order to calculate W τ ( x 0 , T ) using the Riccati equa- tion approach of [1 1], w e will consider the following RDEs: ˙ S ǫ = AS ǫ + S ǫ A ′ − ( B 1 − τ S ǫ C ′ 1 D 1 ) ( I − τ D ′ 1 D 1 ) − 1 ( B 1 − τ S ǫ C ′ 1 D 1 ) ′ − B 2 B ′ 2 τ − τ S ǫ C 1 C ′ 1 S ǫ ; S ǫ ( T ) = ǫI ; (12) ˙ S = AS + S A ′ − ( B 1 − τ S C ′ 1 D 1 ) ( I − τ D ′ 1 D 1 ) − 1 ( B 1 − τ S C ′ 1 D 1 ) ′ − B 2 B ′ 2 τ − τ S C 1 C ′ 1 S ; S ( T ) = 0 (13) which are solved backw ards in time. Theorem 4 (se e [11] for pr o of.) L et τ > 0 b e such t hat I − τ D ′ 1 D 1 > 0 . Also supp ose ther e ex ists an ǫ 0 > 0 such that for al l ǫ ∈ (0 , ǫ 0 ) , al l non-zer o x 0 ∈ R n and al l λ ∈ [0 , T ] , then W ǫ τ ( x 0 , λ, T ) > 0 . Then for a ny ǫ ∈ (0 , ǫ 0 ) , the Ric c ati e quations ( 12) and (13) have solut ions S ǫ τ ( t ) > 0 and S τ ( t ) ≥ 0 define d on [0 , T ] and for any x 0 6 = 0 W ǫ τ ( x 0 , T ) = x ′ 0 [ S ǫ τ (0)] − 1 x 0 > 0 . Also , if S τ (0) > 0 t hen W τ ( x 0 , T ) = x ′ 0 [ S τ (0)] − 1 x 0 > 0 . F urthermor e, if t he matrix S τ (0) ≥ 0 is singular and x 0 is not c ontaine d within the ra nge sp ac e of S τ (0) , then W τ ( x 0 , T ) = ∞ . The following lemma shows that the time in terv al [0 , T ] can alwa ys b e chosen shor t enough to guarantee that solutions to the RDEs exist. Lemma 2 L et ǫ ∗ > 0 and τ ∗ > 0 b e given. Then ther e exists a sufficiently smal l ˜ T > 0 such that the RDEs (12) and (13) b oth have solutions on [0 , ˜ T ] and S ǫ ∗ τ ∗ ( t ) > 0 . Pr o of. This res ult follows from standard re sults on dif- ferential eq uations and the fact that S ǫ ∗ ( T ) = ǫ ∗ I > 0. ✷ Lemma 3 Corr esp onding t o the syst em (1), we c onsider the dual system: ˙ x ( t ) = − A ′ x ( t ) + C ′ 1 ξ ( t ); y ( t ) = B ′ 1 x ( t ) − D ′ 1 ξ ( t ); z ( t ) = B ′ 2 x ( t ) (14) 5 define d on the time interval [0 , T ] , with initial c ondition x ( λ ) = ˜ x 0 wher e λ ∈ [0 , T ) . Also, supp ose ǫ > 0 and τ > 0 ar e such that the RDEs (12 ) and (13) b oth have solutions on [0 , T ] . Then, we c an write ˜ x ′ 0 S ǫ τ ( λ ) ˜ x 0 = sup ξ ( · ) ∈ L 2 [ λ,T ] ( ǫ k x ( T ) k 2 + R T λ k y k 2 + 1 τ k z k 2 − 1 τ k ξ k 2 dt ) (15) and ˜ x ′ 0 S τ ( λ ) ˜ x 0 = sup ξ ( · ) ∈ L 2 [ λ,T ] Z T λ k y k 2 + 1 τ k z k 2 − 1 τ k ξ k 2 dt. (16) F urthermor e, for any λ ∈ [0 , T ) , we have S ǫ τ ( λ ) ≥ S τ ( λ ) ≥ 0 . (17) Pr o of. It follows via some straig ht forward algebraic ma- nipulations that the RDE (12 ) ca n b e re- written as ˙ S ǫ = AS ǫ + S ǫ A ′ − ( S ǫ C ′ 1 − B 1 D ′ 1 ) I τ − D 1 D ′ 1 − 1 ( S ǫ C ′ 1 − B 1 D ′ 1 ) ′ − B 2 B ′ 2 τ − B 1 B ′ 1 ; S ǫ ( T ) = ǫI . (18) Similarly , the RDE (13) can b e re-written as ˙ S = AS + S A ′ − ( S C ′ 1 − B 1 D ′ 1 ) I τ − D 1 D ′ 1 − 1 ( S C ′ 1 − B 1 D ′ 1 ) ′ − B 2 B ′ 2 τ − B 1 B ′ 1 ; S ( T ) = 0 . (19) Then, the formulas (15), (16) follow direc tly from a stan- dard re s ult on the linear quadratic reg ula tor problem; e.g., s e e page 55 of [23 ]. Also, the firs t inequality in (1 7) follows by compar ing (1 5) a nd (16), and the second in- equality in (17 follows by setting ξ ( · ) ≡ 0 in (16 ). ✷ The following simple linea r algebr a result will also b e useful in the pro of of our ma in results. Lemma 4 Le t N b e a given matrix and let M > 0 and ˜ M > 0 b e given p ositive definite matric es such that ˜ M = N N ′ + M If the ve ctor x 0 c an b e written as x 0 = N y 0 , we have x 0 ˜ M − 1 x 0 ≤ y ′ 0 y 0 . Pr o of. It follows from the Matrix Inv ersio n Lemma that we can write I − N ′ ( M + N N ′ ) − 1 N = I + N ′ M − 1 N − 1 . Hence, N ′ ( M + N N ′ ) − 1 N = I − I + N ′ M − 1 N − 1 ≤ I . Therefore, y ′ 0 N ′ ( M + N N ′ ) − 1 N y 0 = x ′ 0 ˜ M − 1 x 0 ≤ y ′ 0 y 0 . This completes the pro of of the lemma. ✷ 6 Main Results o n P ossible Controllability In this section, we pres e n t r esults which provide a geo- metric characterization of the differentially po ssibly co n- trollable states of the uncertain system (1), (2). W e first consider the ca se in which H ( s ) ≡ 0. Theorem 5 Consider the unc ertain system (1), (2). Also , s upp ose that H ( s ) ≡ 0 . Then a state x 0 is dif- fer ential ly p ossibly c ontr ol lable if and only if i t is a c ont ro l lable state for the p air ( A, B 1 ) . Pr o of. W e first supp ose x 0 is a differentially po ssibly con- trollable state for the uncertain system (1), (2). Hence, using Observ ation 1 it follows that sup ǫ> 0 sup τ ≥ 0 W ǫ τ ( x 0 , T ) < ∞ (20) for all T > 0 sufficiently small. Now let ǫ ∗ > 0 and τ ∗ > 0 be given and cho ose ˜ T > 0 sufficiently small a s in Lemma 2 . Now s ince H ( s ) ≡ 0 , we m ust have D 1 = 0 and it follows fr o m Lemma 3 that we can write ˜ x ′ 0 S τ ∗ ( λ ) ˜ x 0 = sup ξ ( · ) ∈ L 2 [ λ, ˜ T ] Z ˜ T λ k y k 2 + 1 τ ∗ k z k 2 − 1 τ ∗ k ξ k 2 ! dt = Z ˜ T λ B ′ 1 e − A ′ t ˜ x 0 2 dt + 1 τ ∗ sup ξ ( · ) ∈ L 2 [ λ, ˜ T ] Z ˜ T λ k z k 2 − k ξ k 2 dt = ˜ x ′ 0 W c ( λ, ˜ T ) ˜ x 0 + 1 τ ∗ ˜ x ′ 0 Q ( λ, ˜ T ) ˜ x 0 6 where ˜ x ′ 0 Q ( λ, ˜ T ) ˜ x 0 = sup ξ ( · ) ∈ L 2 [ λ, ˜ T ] Z ˜ T λ k z k 2 − k ξ k 2 dt ≥ 0 (21) and W c ( λ, ˜ T ) = Z ˜ T λ e − At B 1 B ′ 1 e − A ′ t dt is the controllability Gramian for the pair ( A, B 1 ); e.g ., see [1]. F rom this, we can conclude that S τ ( λ ) = W c ( λ, ˜ T ) + 1 τ Q ( λ, ˜ T ) (22) is monotone decreas ing as τ incr e a ses and hence, the RDE (13) do es not hav e a finite escap e time o n [0 , ˜ T ] for all τ ≥ τ ∗ . F urthermore, it follows from the c o nt inuit y of solutions to the RDEs (13) a nd (12 ) that for all τ ≥ τ ∗ , there exists a ǫ ∈ (0 , ǫ ∗ ) sufficiently sma ll such that the RDE (12 ) has a solution S ǫ τ ( t ) on [0 , ˜ T ]. W e now o bserve that S ǫ τ ( λ ) > S τ ( λ ) ≥ 0 for all λ ∈ [0 , ˜ T ]. Indeed, g iven any non- z ero ˜ x 0 ∈ R n , it follows from (15) and (16) that ˜ x ′ 0 S ǫ τ ( λ ) ˜ x 0 ≥ ˜ x ′ 0 S τ ( λ ) ˜ x 0 + ǫ k x ∗ ( T ) k 2 (23) where x ∗ ( t ) is the solution to (14 ) with initial condition x ( λ ) = ˜ x 0 and input ξ ∗ ( · ) whic h achiev es the supremum in (16 ). F urthermore, since S τ ( t ) the solutio n to RDE (13) exists on [0 , ˜ T ], it follows by a sta ndard result on linear quadra tic o ptimal co n trol (e.g., see [23 ]) that ξ ∗ ( · ) is defined b y the follo wing state feedback control law for (14) ξ ∗ ( t ) = − τ C 1 S τ ( t ) x ∗ ( t ) . Then, we can write x ∗ ( T ) = Φ( ˜ T , λ ) ˜ x 0 where Φ( ˜ T , λ ) is the state tr ansition matrix for the close d lo o p system ˙ x = ( − A ′ − τ C ′ 1 C 1 S τ ( t )) x. Hence, it follows from (23) tha t ˜ x ′ 0 S ǫ τ ( λ ) ˜ x 0 ≥ ˜ x ′ 0 S τ ( λ ) ˜ x 0 + ǫ k Φ( ˜ T , λ ) ˜ x 0 k 2 > ˜ x ′ 0 S τ ( λ ) ˜ x 0 . Thu s, w e can conclude that S ǫ τ ( λ ) > S τ ( λ ) ≥ 0 for all λ ∈ [0 , ˜ T ]. Also , it follows from Lemma 3, that for an y λ ∈ [0 , ˜ T ) that S ǫ τ ( λ ) is mo notone decreas ing as ǫ → 0. W e have now established that given any τ ≥ τ ∗ , there exists an ǫ ∈ (0 , ǫ ∗ ) such that S ǫ τ ( t ) the s olution to (12) exists on [0 , ˜ T ] and S ǫ τ ( t ) > 0 for a ll t ∈ [0 , ˜ T ]. F rom this, it follo ws that P ǫ τ ( t ) = [ S ǫ τ ( t )] − 1 > 0 is the solution to (9) o n [0 , ˜ T ]. Therefore, it follows fro m Theor em 4 that given any x 0 ∈ R n , then we can write W ǫ τ ( x 0 , ˜ T ) = x ′ 0 [ S ǫ τ (0)] − 1 x 0 . Now we return to the inequality (29) for our differen tially po ssibly controllable state x 0 and co nc lude that there exists a constant M ≥ 0 such that given any in teger k ≥ k 0 ≥ τ ∗ , there exists an ǫ k ∈ (0 , ǫ ∗ ) such tha t W ǫ k ( x 0 , ˜ T ) = x ′ 0 [ S ǫ k k (0)] − 1 x 0 ≤ M . (24) Also, we can as sume without loss of genera lit y that ǫ k → 0 as k → ∞ . W e now define a sequence { y k 0 } ∞ k = k 0 as y k 0 = [ S ǫ k k (0)] − 1 2 x 0 . Hence, we hav e x 0 = [ S ǫ k k (0)] 1 2 y k 0 ∀ k ≥ k 0 (25) and therefore it follows from (2 4) that k y k 0 k 2 ≤ M ∀ k ≥ k 0 . F r om this, w e can c onclude that the sequence { y k 0 } ∞ k = k 0 has a conv ergence subsequence { ˜ y k 0 } ∞ k = k 0 : ˜ y k 0 → ¯ y 0 . Now, using the fact tha t for any τ ≥ τ ∗ , then S ǫ τ (0) → S τ (0) as ǫ → 0, combined with (22), it follows fro m (25) that we can write x 0 = h W c (0 , ˜ T ) i 1 2 ¯ y 0 . That is , x 0 is in the r ange space of the controllability Gramian and hence, x 0 is a controllable state for the pair ( A, B 1 ). Conv ersely , supp ose x 0 is a controllable state for the pair ( A, B 1 ). L e t ǫ ∗ > 0 and τ ∗ > 0 b e any p ositive constants. Also let ˜ T > 0 b e any sufficiently small time horizon chosen as in Lemma 2. Then a s ab ov e, given a ny τ ≥ τ ∗ , S τ ( t ) the solution to (13 ) exists and is p os itive semidefinite on [0 , ˜ T ] a nd sa tis fie s (22). Also, it follows from (22) that for all τ > 0 , the solution to (13) exists and is p ositive semidefinite on [0 , ˜ T ]. F urthermo re a lso as ab ove, given any τ > 0, there exists a sufficiently small ǫ ∈ (0 , ǫ ∗ ) such that S ǫ τ ( t ) the solution to (12) exists and is p ositive definite o n [0 , ˜ T ]. Moreov er, we hav e S ǫ τ ( λ ) > S τ ( λ ) ≥ 0 and S ǫ τ ( λ ) → S τ ( λ ) as ǫ → 0 for all λ ∈ [0 , ˜ T ]. Hence, using (22), we can write S ǫ τ (0) = W c (0 , ˜ T ) + Φ ǫ (26) where Φ ǫ = S ǫ τ (0) − S τ (0) + 1 τ Q (0 , ˜ T ) > 0 a nd Q (0 , ˜ T ) ≥ 0 is defined as in (21). 7 Now using the fac t that x 0 is a controllable state for the pair ( A, B 1 ), it follows that we can write x 0 = h W c (0 , ˜ T ) i 1 2 y 0 for s ome vector y 0 where W c (0 , ˜ T ) is the controllabil- it y Gramian for the pair ( A, B 1 ). Th us, using (26) and Lemma 4, we co nclude that W ǫ τ ( x 0 , ˜ T ) = x ′ 0 [ S ǫ τ (0)] − 1 x 0 ≤ y ′ 0 y 0 . (27) Now for fixed τ > 0, it follows fro m the definition that W ǫ τ ( x 0 , ˜ T ) is monotonically increasing a s ǫ → 0 . Also , (27) holds for all sufficiently small ǫ > 0 . Thus, we must hav e W τ ( x 0 , ˜ T ) = sup ǫ> 0 W ǫ τ ( x 0 , ˜ T ) ≤ y ′ 0 y 0 (28) for all τ > 0. W e now consider the case of τ = 0. In this cas e, W ǫ 0 ( x 0 , 0 , ˜ T ) = inf [ ξ ( · ) ,u ( · )] ∈ L 2 [0 ,T ] k x ( T ) k 2 ǫ + Z T 0 k u k 2 dt. Now since x 0 is a controllable state for the pair ( A, B 1 ), it follows that there exists a control u ∗ ( · ) defined on [0 , ˜ T ] such that with ξ ( · ) ≡ 0 , then x ( T ) = 0. Hence, W ǫ 0 ( x 0 , 0 , ˜ T ) ≤ Z T 0 k u ∗ k 2 dt for all ǫ > 0 . Ther efore, we hav e W 0 ( x 0 , ˜ T ) = sup ǫ> 0 W ǫ 0 ( x 0 , ˜ T ) ≤ Z T 0 k u ∗ k 2 dt. W e hav e now shown that W τ ( x 0 , ˜ T ) < ∞ for all τ ≥ 0 and for a ll ˜ T > 0 sufficiently small. Thus, using Observ ation 1, we can co nclude that x 0 is a differ- ent ially po ssibly controllable s tate. This completes the pro of. ✷ R emark: The above theor e m implies that when H ( s ) ≡ 0 the p ossibly c o nt rolla ble set is a linear s pace equal to the controllable s ubspace of the pair ( A, B 1 ). F rom the ab ov e theor em and the fact that H ( s ) ≡ 0 , it follows that we can apply the standa rd Ka lman decomp osition to represent the uncertain sy stem a s shown in Fig. 4. + Controllable Uncontrollable y z ξ ∆ u Fig. 4. Control-Uncon trollable decomp osition for the uncer- tain system when H ( s ) ≡ 0. In this case, we only have uncer taint y in the uncontrol- lable subsystem or in the coupling b etw een the t w o sub- systems. W e now consider the case in which H ( s ) 6≡ 0. Theorem 6 Consider the u nc ert ain system (1), (2) and supp ose t hat H ( s ) 6≡ 0 . Then, a st ate x 0 is differ ent ial ly p ossibly c ontr ol lable if and only if x 0 is a c ontr ol lable state for the p air ( A, [ B 1 B 2 ]) . Pr o of. Supp ose x 0 is a differentially p ossibly controllable state for the uncertain system (1), (2). Hence, using Ob- serv ation 1 it follows that sup ǫ> 0 sup τ ≥ 0 W ǫ τ ( x 0 , T ) < ∞ (29) for T > 0 sufficiently small. Setting τ = 0 , it follo ws that there exists a constant M > 0 such that inf [ ξ ( · ) ,u ( · )] ∈ L 2 [0 ,T ] k x ( T ) k 2 ǫ + Z T 0 k u k 2 dt ≤ M ∀ ǫ > 0 where the inf is defined for the system (1) with initial condition x (0) = x 0 . F rom this it follows that inf [ ξ ( · ) ,u ( · )] ∈ L 2 [0 ,T ] k x ( T ) k 2 ≤ ǫM ∀ ǫ > 0 and hence, inf [ ξ ( · ) ,u ( · )] ∈ L 2 [0 ,T ] k x ( T ) k 2 = 0 . Therefore, the state x 0 m ust b e a con trollable state for the pair ( A, [ B 1 B 2 ]). W e now supp ose the state x 0 is a co n trolla ble sta te for the pair ( A, [ B 1 B 2 ]) and show that x 0 is a differentially 8 po ssibly controllable state for the uncertain sy stem (1), (2). In o rder to prov e that the state x 0 is p ossibly c o n- trollable, we must show that for all T > 0 s ufficiently small sup τ ≥ 0 W τ ( x 0 , T ) < ∞ . In or der to show this, w e let T > 0 b e given and establish the following claim: Claim. F o r the system (1 ), there ex ists a n input pair { u ∗ ( · ) , ξ ∗ ( · ) } defined on [0 , T ] such that x (0) = x 0 , x ( T ) = 0 and Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt ≤ 0 . T o establish this claim, we first supp os e that the sta n- dard Kalman decompos ition is applied to the pair ( A, B 1 ) to de c o mpo se it into controllable and uncon- trollable subsystems. That is, w e can assume without loss of g e ne r ality that the system (1) is such that the matrices A , B 1 , B 2 , C 1 and the vector x ar e of the for m A = " A 11 A 12 0 A 22 # ; B 1 = " B 11 0 # ; B 2 = " B 21 B 22 # ; C 1 = h C 11 C 12 i ; x = " x 1 x 2 # (30) where the pair ( A 11 , B 11 ) is controllable. Now consider an input pair { ¯ u ( · ) , ¯ ξ ( · ) } defined on [0 , T 3 ] such that x (0) = x 0 and x ( T 3 ) = 0. Such an input pair exists due to our assumption that x 0 is a controllable state for the pair ( A, [ B 1 B 2 ]). Then, we can write J 1 = Z T 3 0 k ¯ ξ k 2 − k ¯ z k 2 dt < ∞ . Now for t ∈ ( T 3 , 2 T 3 ], co nsider the input pair { ˆ u ( · ) , ˆ ξ ( · ) } defined so that ˆ ξ ( · ) ≡ 0 and so that ˆ u ( · ) is such that the corr esp onding uncertaint y output ˆ z ( · ) 6≡ 0. Such a n input ˆ u ( · ) exists since w e hav e assumed that H ( s ) 6≡ 0. Then, we let γ = Z 2 T 3 T 3 k ˆ z k 2 dt > 0 . Also, since x ( T 3 ) = 0 and ˆ ξ ( t ) = 0 for t ∈ ( T 3 , 2 T 3 ], it follows from (30 ) that x 2 ( t ) = 0 for t ∈ ( T 3 , 2 T 3 ]. Now for t ∈ ( 2 T 3 , T ], c o nsider the input pair { ˇ u ( · ) , ˇ ξ ( · ) } defined so that ˇ ξ ( · ) ≡ 0 and so that ˆ u ( · ) is such that x 1 ( T ) = 0 . Suc h a n input ˇ u ( · ) exists since w e hav e as- sumed tha t the pair ( A 11 , B 11 ) is co n trolla ble . Also, since x 2 ( 2 T 3 ) = 0 and ˇ ξ ( t ) = 0 fo r t ∈ ( 2 T 3 , T ], it follows from (30) that x 2 ( t ) = 0 for t ∈ ( 2 T 3 , T ]. W e let ˇ z ( t ) denote the corr esp onding uncer taint y output for t ∈ ( 2 T 3 , T ]. W e no w consider an input pair { u ∗ ( · ) , ξ ∗ ( · ) } defined as follows: u ∗ ( t ) = ¯ u ( t ) for t ∈ [0 , T 3 ]; ˆ u ( t ) for t ∈ ( T 3 , 2 T 3 ]; ˇ u ( t ) for t ∈ ( 2 T 3 , T ]; ξ ∗ ( t ) = ( ¯ ξ ( t ) for t ∈ [0 , T 3 ]; 0 for t ∈ ( T 3 , T ] . It follows fro m this construction that the pair { u ∗ ( · ) , ξ ∗ ( · ) } gives x ( T ) = 0 a nd Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt = Z T 3 0 k ¯ ξ k 2 − k ¯ z k 2 dt − Z 2 T 3 T 3 k ˆ z k 2 dt − Z T 2 T 3 k ˇ z k 2 dt ≤ J 1 − γ . W e now let µ > 0 b e a scaling parameter and intro duce a mo dified input pair { u ∗ ( · ) , ξ ∗ ( · ) } defined a s follows: u ∗ ( t ) = ¯ u ( t ) for t ∈ [0 , T 3 ]; µ ˆ u ( t ) for t ∈ ( T 3 , 2 T 3 ]; µ ˇ u ( t ) for t ∈ ( 2 T 3 , T ]; ξ ∗ ( t ) = ( ¯ ξ ( t ) for t ∈ [0 , T 3 ]; 0 for t ∈ ( T 3 , T ] . It is straightforward to verify that this input pair also leads to x ( T ) = 0 and Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt ≤ J 1 − µ 2 γ . Letting, µ = s J 1 γ it follows that Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt ≤ 0 9 and henc e , the conditions of the cla im are s atisfied. T his completes the pro of of the c la im. W e now use this cla im to complete the proo f. Indeed, for any τ ≥ 0 and ǫ > 0, we hav e W ǫ τ ( x 0 , T ) = inf [ ξ ( · ) ,u ( · )] ∈ L 2 [0 ,T ] k x ( T ) k 2 ǫ + Z T 0 k u k 2 + τ k ξ k 2 − τ k z k 2 dt ≤ Z T 0 k u ∗ k 2 + τ k ξ ∗ k 2 − τ k z ∗ k 2 dt (31) where the input pair { u ∗ ( · ) , ξ ∗ ( · ) } is cons tructed using the ab ov e cla im such tha t x (0) = x 0 and x ( T ) = 0 and Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt ≤ 0 . Also, z ∗ ( · ) is the cor resp onding uncertain ty output for the sys tem (1). Since ǫ > 0 was ar bitrary , it follo ws fro m (31) that W τ ( x 0 , T ) = sup ǫ> 0 W ǫ τ ( x 0 , T ) ≤ Z T 0 k u ∗ k 2 dt + τ Z T 0 k ξ ∗ k 2 − k z ∗ k 2 dt ≤ Z T 0 k u ∗ k 2 dt (32) for all τ ≥ 0. Thus, we can conclude that sup τ ≥ 0 W τ ( x 0 , T ) < ∞ . Since, T > 0 was arbitrar y , it follows from Observ ation 1 that x 0 is differentially p ossibly co n trollable . This com- pletes the pr o of of the theor em. ✷ R emark: The ab ov e theo rem implies that when H ( s ) 6≡ 0 the p oss ibly controllable set is a linea r space equa l to the controllable subspace of the pa ir ( A, [ B 1 B 2 ]). F r om the ab ov e theorem, it fo llows that we can apply the standa rd Kalma n decompo sition to r epresent the uncertain system a s shown in Fig . 5. In this case, we only have uncerta in ty in the controllable subsystem or in the coupling betw een the t wo subsys- tems. 7 Kalman Decomp ositions W e can now combine the results of Theorems 1 , 2, 5, and 6 to obtain a complete Ka lman decompositio n for the uncertain sys tem in the following cases: Uncontrollable Controllable ∆ ξ u + y + z Fig. 5. Con trol-Uncontrollable decomp osition for the un cer- tain system when H ( s ) 6≡ 0. Case 1 G ( s ) ≡ 0, H ( s ) ≡ 0 . In this case, w e ap- ply the standard Kalman dec o mpo sition to the triple ( C 2 , A, B 1 ) to obtain the situation as illustra ted in the blo ck diagra m shown in Fig. 6 . z Controllable Observable Uncontrollable Observable Controllable Unobservable Uncontrollable Unobservable u + y ∆ + ξ Fig. 6. K alman decomp osition for th e uncertain sy stem when G ( s ) ≡ 0, H ( s ) ≡ 0. This situatio n corr esp onds to uncerta in ty only in the uncontrollable-unobserv able block. Also there is uncertaint y in the coupling b etw een uncontrollable- observ able blo ck and the unco nt rolla ble-unobserv able blo ck. F urthermor e, there is uncer ta in ty in the coupling betw een the uncontrollable-unobser v able blo ck and the controllable-unobserv able block. Case 2 G ( s ) 6≡ 0, H ( s ) ≡ 0. In this case, we apply the standard Kalman decomp ositio n to the triple ( " C 1 C 2 # , A, B 1 ) to obtain the situation as illustrated in the blo ck diag ram shown in Fig. 7 . 10 Controllable Observable Uncontrollable Observable Controllable Unobservable Uncontrollable Unobservable u + ∆ z ξ y Fig. 7. K alman decomp osition for th e uncertain sy stem when G ( s ) 6≡ 0, H ( s ) ≡ 0. This s ituation corr esp onds to uncertaint y only in the uncontrollable-observ able blo ck. Also ther e is uncer- taint y in the coupling b etw een uncontrollable-observ able blo ck a nd the uncontrollable-unobserv able blo ck. F ur- thermore, there is uncer taint y in the coupling b etw een the uncont rolla ble obser v able block and the c o nt rolla ble- unobserv able blo ck. As well, there is uncertain ty in the coupling betw een the uncontrollable-o bs erv a ble blo ck and the co nt rolla ble-observ able block. Note that in or de r to guarantee tha t the condition H ( s ) ≡ 0 we needed to make a further re striction on the con trollable obser v able blo ck in the a bove dia g ram so that in fact it only has an output y . Case 3 G ( s ) ≡ 0, H ( s ) 6≡ 0 . In this case, we apply the standard Ka lma n decomp osition to the triple ( C 1 , A, [ B 1 B 2 ]) to obtain the situation as illustrated in the blo ck diag ram shown in Fig. 8. This s ituation corr esp onds to uncertaint y only in the controllable-unobserv able blo ck. Also ther e is uncer- taint y in the coupling b etw een controllable-o bs erv a ble blo ck and ea ch of the o ther blo cks. Case 4 G ( s ) 6≡ 0, H ( s ) 6≡ 0 . In this case, we apply the standard Ka lma n decomp osition to the triple ( " C 1 C 2 # , A, [ B 1 B 2 ]) to obtain the situation as illustrated in the blo ck diag ram shown in Fig. 9. This s ituation corr esp onds to uncertaint y only in the controllable-observ able blo ck. Also there is uncer- taint y in the coupling b etw een controllable-o bs erv a ble Controllable Observable Uncontrollable Observable Controllable Unobservable Uncontrollable Unobservable u ∆ z ξ y + + + + Fig. 8. K alman decomp osition for th e uncertain sy stem when G ( s ) ≡ 0, H ( s ) 6≡ 0. Controllable Observable Uncontrollable Observable Controllable Unobservable Uncontrollable Unobservable u ∆ z ξ y + + Fig. 9. K alman decomp osition for th e uncertain sy stem when G ( s ) 6≡ 0, H ( s ) 6≡ 0. blo ck and the uncontrollable-observ able blo ck. F ur- thermore, there is uncertaint y in the coupling b etw e en the controllable-o bserv a ble block and the controllable- unobserv able blo ck. As well, there is uncerta in ty in the coupling b etw een the uncontrollable-obse r v able blo ck and the controllable-unobser v able blo ck. R emark Note that each of the four cases considered above corres p onds to uncertaint y only in one of the four blo cks in the Kalma n decomp osition. It migh t b e conjectured that if s tructured uncerta in ty was allow ed then w e could distribute the uncertaint y blo cks around the fo ur blo cks in the Kalman decomp osition r ather than the current re- quirement that the s ingle unce r taint y blo ck cor resp onds to uncer taint y in one of the four blo cks in the Kalman decomp osition. 11 8 Illustrativ e Exampl e s 8.1 Example 1 In this example, we consider an uncer tain sys tem o f the form (1), (2) de fined by the following matr ic e s: A = " − 1 . 283 8 0 . 300 2 − 0 . 760 3 − 0 . 26 6 2 # ; B 1 = " 0 . 3911 0 . 4348 # ; B 2 = " 0 . 7251 0 . 8062 # ; C 1 = h 0 . 6534 − 0 . 0 9 08 i ; D 1 = 0; C 2 = h − 0 . 619 0 0 . 567 8 i ; D 2 = 0 . This system is a mo dificatio n of the system conside r ed in the e xample of [11] to consider the case of unstructured uncertaint y . W e wis h to deter mine if this uncerta in sys- tem co n tains a ny states which are not po ssibly control- lable in order to see if this uncer tain system mo del can be replaced by an equiv alent r educed dimension uncer - tain system mo del. W e first calculate the tra nsfer func- tion H ( s ) = C 1 ( sI − A ) − 1 B 1 + D 1 = 0 . 216 s +0 . 1296 s 2 +1 . 55 s +0 . 57 6≡ 0 . Hence, we apply Theor em 6 to this s ystem a nd con- sider the uncon trollable s tates of the pair ( A, [ B 1 B 2 ]); e.g., see [1]. Indeed, the eigenv alues a nd corr e spo nding left eigen vectors of the ma trix A ar e λ 1 = − 0 . 9500 , λ 2 = − 0 . 6 0 00, x 1 = " − 0 . 915 6 0 . 4020 # , and x 2 = " 0 . 7435 − 0 . 668 7 # . Also, we hav e B ′ 1 x 2 ≈ B ′ 2 x 2 ≈ 0. Hence (to the av ail- able numerical accuracy), x 2 is an uncontrollable s tate for the pair ( A, [ B 1 B 2 ]). Hence using Theo r em 6, w e ca n conclude that x 2 is not a p oss ibly co nt rolla ble state for this uncertain sys tem. W e show that x 2 is not a p ossibly controllable state using Theorem 4. Indeed, we let τ = 1 and so lve the Riccati differential equation (13) for differ en t v alue s of T ∈ [0 , 1]. A plot of the resulting eigen v alue s of S τ (0) v ersus T is shown in Fig. 1 0. F rom this plot, w e can see that the matrix S τ (0) is singula r for all T ∈ [0 , 1 ]. F urthermor e , we find that S τ (0) x 2 = 0 fo r all T ∈ [0 , 1 ]. Thus, using Theorem 4, it follows that with τ = 1 , W τ ( x 2 , T ) = ∞ for all T ∈ [0 , 1]. Hence, it follows fr om Definition 5 that the state x 2 is not (differen tially) p os sibly controllable. W e now apply the Kalman decomp osition to this un- certain system; e.g., see [1, 19, 20]. Indeed, if w e ap- ply the state space transforma tion ˜ x = T x with T = " − 0 . 743 5 0 . 668 7 0 . 6687 0 . 74 3 5 # to this uncertain sys tem, we obtain 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 −1 0 1 2 3 4 5 6 T λ min [S τ (0)], λ max [S τ (0)] Fig. 10. λ min [ S τ (0)] and λ max [ S τ (0)] versus T with τ = 1. an uncertain s y stem of the for m (1), (2) de fined by: ˜ A = " − 0 . 600 0 0 . 000 0 1 . 0605 − 0 . 9 5 00 # ; ˜ B 1 = " 0 . 0000 0 . 5848 # ; ˜ B 2 = " 0 . 0000 1 . 0843 # ; ˜ C 1 = h − 0 . 546 5 0 . 369 4 i ; ˜ D 1 = 0; ˜ C 2 = h 0 . 8399 0 . 00 8 2 i ; ˜ D 2 = 0 . F r om this, the co nt rol input u and the uncertain ty input ξ do not a ffect the first state of this system. Thus, we can remov e this state witho ut changing the input-output b e- havior of the system. This leads to a reduced dimens io n uncertain system de s crib ed by the s tate equations ˙ x = − 0 . 9 5 00 x + 0 . 58 4 8 u + 1 . 08 43 ξ ; z = 0 . 369 4 x ; y = 0 . 0 082 x and the av erag e d IQC (2). 8.2 Example 2 This example considers a n uncertain system co rresp ond- ing to the electrical c ir cuit shown in Figure 11. It is straightforward to der ive the fo llowing state s pace mo del for this circ uit: " dV 1 dt dV 2 dt # = − 1 C 1 1 R 3 + 1 R 1 − 1 R 3 C 1 − 1 R 3 C 2 − 1 C 2 1 R 3 + 1 R 2 " V 1 V 2 # + " 1 C 1 1 C 2 # u ; y = h 0 1 i " V 1 V 2 # . (33) 12 + − + − + − + − P S f r a g r e p la c e m e n t s u R 1 R 2 R 3 C 1 C 2 V 1 V 2 y Fig. 11. Electrical circuit corresponding to Examp le 2. In this example, we choos e the parameter v alues for the nominal to b e R 1 = 0 . 5Ω, R 2 = 1 . 0Ω, R 3 = 0 . 5Ω, C 1 = 2 . 0 F , and C 2 = 1 . 0 F . F or these par ameter v alues, the nominal system is not controllable. W e no w co nsider tw o cas es of uncertain pa rameters for this system. In the first ca se, we find that all non-zero states of the system ar e p ossibly c o nt rolla ble and no reduced dimension model can b e co nstructed using the Kalman deco mp os ition of Section 7. In the second case, we find that there exist non-zero states o f the system which a r e not p ossibly controllable. Then, w e use the Kalman dec ompo sition of Section 7 to construct a mo del of order one which do e s not change the input-output behavior of the system. Case 1. In this cas e, we supp ose that the conductance of the r esistor R 1 is uncer ta in a nd we wr ite 1 R 1 = 2 + ∆ where | ∆ | ≤ 1. This lea ds to an uncertain sys tem of the form (1) where A = " − 2 − 1 − 2 − 3 # ; B 1 = " 0 . 5 1 # ; B 2 = " − 0 . 5 0 # ; C 1 = h 1 0 i ; D 1 = 0; C 2 = h 0 1 i ; D 2 = 0 ; and ξ = ∆ z . Since | ∆ | ≤ 1 , it follows that the av eraged IQC (2) will b e satis fie d. F or this uncerta in sys tem, we calculate the tra nsfer functions G ( s ) and H ( s ) as G ( s ) = 1 s 2 + 5 s + 4 6≡ 0 ; H ( s ) = 0 . 5 s + 0 . 5 s 2 + 5 s + 4 6≡ 0 . F o r this uncertain system, the pair ( A, B 1 ) is not con- trollable. How ev er, the pair ( A, [ B 1 B 2 ]) is controllable. Thu s, it follows from Theore m 6 that the system has no states which are not differentially p os sibly controllable. Also, the pair ( " C 1 C 2 # , A ) is o bserv a ble and hence, us- ing Case 4 of the Kalman decomp os itio ns considered in Section 7, w e cannot c o nstruct an equiv alent reduce d di- mension uncertain system corr esp onding to this uncer- tain system. Note tha t the e xample considered in this case is such that the nominal s ystem is not c ontrollable, but the uncerta in system becomes co n trolla ble for non-zero v alues of the uncertain parameter ∆. If we change the par a meter C 1 to C 1 = 1 , we obtain an uncertain system for which the nominal system is controllable but for whic h the sy stem bec omes unco n trollable for one v alue of the uncertain parameter (∆ = − 1). Case 2. In this cas e, we supp ose that the conductance of the resis tor R 3 is uncer ta in a nd we write 1 R 3 = 2 + ∆ where | ∆ | ≤ 1. This lea ds to an uncertain sys tem of the form (1) where A = " − 2 − 1 − 2 − 3 # ; B 1 = " 0 . 5 1 # ; B 2 = " − 0 . 5 − 1 # ; C 1 = h 1 1 i ; D 1 = 0 ; C 2 = h 0 1 i ; D 2 = 0 ; and ξ = ∆ z . F or this uncertain system, we calc ula te the transfer functions G ( s ) and H ( s ) as G ( s ) = − s − 1 s 2 + 5 s + 4 6≡ 0 ; H ( s ) = 1 . 5 s + 1 . 5 s 2 + 5 s + 4 6≡ 0 . F o r this uncertain system, the pair ( A, [ B 1 B 2 ]) is not controllable. Thus, it follo ws from Theorem 6 that the system has non-zero states whic h are not differentially po ssibly controllable. Also, the pair ( " C 1 C 2 # , A ) is ob- serv able. W e now constr uct the Kalman decomp ositio n for this s ystem as in Ca se 4 of Sec tio n 7. Indeed, we apply a s ta te space transforma tion ˜ x = T x with T = " − 0 . 894 4 0 . 447 2 − 0 . 447 2 − 0 . 89 4 4 # to this uncertain sys tem to obtain an uncertain s y stem of the for m (1), (2) de fined by: ˜ A = " − 1 . 000 0 0 . 000 0 − 1 . 000 0 − 4 . 0 000 # ; ˜ B 1 = " 0 . 0000 − 1 . 118 0 # ; ˜ B 2 = " − 0 . 000 0 1 . 1180 # ; ˜ C 1 = h − 0 . 447 2 − 1 . 3 416 i ; ˜ D 1 = 0; ˜ C 2 = h 0 . 4472 − 0 . 8 9 44 i ; ˜ D 2 = 0 . F r om this, the co nt rol input u and the uncertain ty input ξ do not a ffect the first state of this system. Thus, we can remov e this state witho ut changing the input-output b e- havior of the system. This leads to a reduced dimens io n 13 uncertain system de s crib ed by the s tate equations ˙ x = − 4 . 0 x − 1 . 1 180 u + 1 . 11 80 ξ ; z = − 1 . 34 16 x ; y = − 0 . 894 4 x and the averaged IQC (2). 9 Conclusions and F uture R esearc h The results of this paper ha ve led to a geo metric char- acterization of the notion of possible con trollability for a class of uncertain linear sy stems. These results com- bined with a co rresp onding geometric characteriza tion of the no tion of ro bust unobserv ability hav e allowed us to pres ent a complete Kalman deco mp os ition for uncer- tain systems. Possible ar eas of future re search motiv ated by the results of this pap er include extending the re s ults of the pap er to the c a se of str uctured uncertaint y sub ject to m ultiple IQCs. References [1] P . J. Antsaklis and A. N. Michel, Line ar Systems , 2nd ed. Boston: Bir kh¨ auser, 2006. [2] I. R. Petersen, V. A. Ugrinovskii, and A. V. Savkin, R obust Contr ol D esign using H ∞ Metho ds . Springer-V erlag London, 2000. [3] S. P . Bhatta cha ryya, “G eneralized con trollability , ( a, b )- inv ariant subspace s and parameter inv ariant con trol,” SIAM J. Algebr aic Discr ete Metho ds , vo l. 4, no. 4, pp. 52–533, 1983. [4] I. R. Petersen, “Notions of stabilizability and con trollability for a class of uncertain linear systems,” International Journal of Contr ol , vol. 46, no. 2, pp. 409–422, 1987. [5] ——, “The matc hing condition and feedbac k co ntrollabilit y of uncertain li near systems,” in R obust Contr ol of Line ar Systems and Nonline ar Contr ol , M. A. Kaasho ek, J. H . v an Sc hup p en, and A. C. M. Ran, Eds. Boston: Bi rkh¨ auser, 1990. [6] G. Cont e, A. M. Perdon, and G. Marr o, “Computing the maximum robust con trolled inv ariant subspace,” Systems and Contr ol Letters , vol. 17, no. 2, pp. 131–135, 1991. [7] G. Basile and G. Marro, Contr ol le d and c onditione d invariants in line ar system the ory . Englew o od Cl iffs, NJ: Prent ice H all, 1992. [8] A. V. Savkin and I. R. Pet ersen, “W eak r obust controllabilit y and observ ability of uncertain l inear systems,” IEEE T r ansactions on Automatic Contr ol , vol. 44, no. 5, pp. 1037– 1041, 1999. [9] I. R. Petersen and A. V. Savkin, R obust Kalma n Filtering for Signals and Syst ems with L ar ge Unc ert ainties . Birkh¨ auser Boston, 1999. [10] I. R. Pet ersen, “Notions of observ ability for uncertain linear systems with structured uncertaint y ,” SIAM Journa l on Contr ol and O ptimization , v ol. 41, no. 2, pp. 345–361, 2002. [11] ——, “A notion of p ossible cont rollabil it y for uncertain linear systems with structured uncertaint y ,” Automatic a , vol. 45, no. 1, pp. 134–141, 2009. [12] ——, “Robust unobserv ability for uncertain li near systems with structured uncertain t y ,” IEEE T r ansactions on Au tomatic Contr ol , v ol. 52, no. 8, pp. 1461–1469, 2007. [13] ——, “A Kalman decomposition f or robustly unobserv able uncertain linear systems,” Syste ms and Contr ol L etters , v ol. 57, pp. 800–804, 2008. [14] C. L. Beck and J. C. Doyle, “A necessary and sufficien t minimality condition for uncertain systems,” IEEE T r ansactions on Automatic Contr ol , vol. 44, no. 10, pp. 1802– 1813, 1999. [15] C. Beck and R. D’ Andrea, “Noncommu ting multidimensional realization theory: Minimali t y , reac hability , and observ abili t y ,” IEEE T r ansactions on Autom atic Contr ol , v ol. 49, no. 10, pp. 1815–1820, 2004. [16] I. R. Petersen, “Equiv alen t realizations for uncertain systems with an IQC uncertain ty description,” Automatic a , v ol. 43, no. 1, pp. 44–55, 2007. [17] W. S. Gray and J. P . Mesko , “Observ ability f unctions for linear and nonlinear systems,” Syste ms and Contr ol Letters , v ol. 38, pp. 99–113, 1999. [18] J. Sche rp en an d W. G ray , “Minimality and lo cal state decompositions of a nonlinear state space realization using energy functions,” IEEE T r ansactions on Automatic Contr ol , v ol. 45, no. 11, pp. 2079–2086, 2000. [19] R. E. Kalm an, “Mathematical descriptions of linear systems,” SIAM Journa l on Contr ol and Optimization , vol. 1, pp. 152– 192, 1963. [20] ——, “On the computation of the reac hable/observ able canonical form,” SIAM Journal on Contr ol and Optimization , v ol. 20, no. 2, pp. 258–260, 1982. [21] A. V. Savkin and I. R. Petersen, “An uncertain ty av eraging approac h to optimal guarantee d cost control of uncertain systems with structured uncertaint y ,” Automatic a , vol. 31, no. 11, pp. 1649–165 4, 1995. [22] ——, “Recursiv e state estimation for uncertain systems with an integral quadratic constraint,” IEEE T r ansactions on Au tomatic Contr ol , v ol. 40, no. 6, pp. 1080–1083, 1995. [23] D. J. Clement s and B. D. O. A nderson, Singular Optimal Contr ol: The Line ar-Quadr atic Pr oblem . Berlin, Germany: Springer V erlag, 1978. 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment