On the scalability and convergence of simultaneous parameter identification and synchronization of dynamical systems
The synchronization of dynamical systems is a method that allows two systems to have identical state trajectories, appart from an error converging to zero. This method consists in an appropriate unidirectional coupling from one system (drive) to the …
Authors: ** Bruno Nery, Rodrigo Ventura **
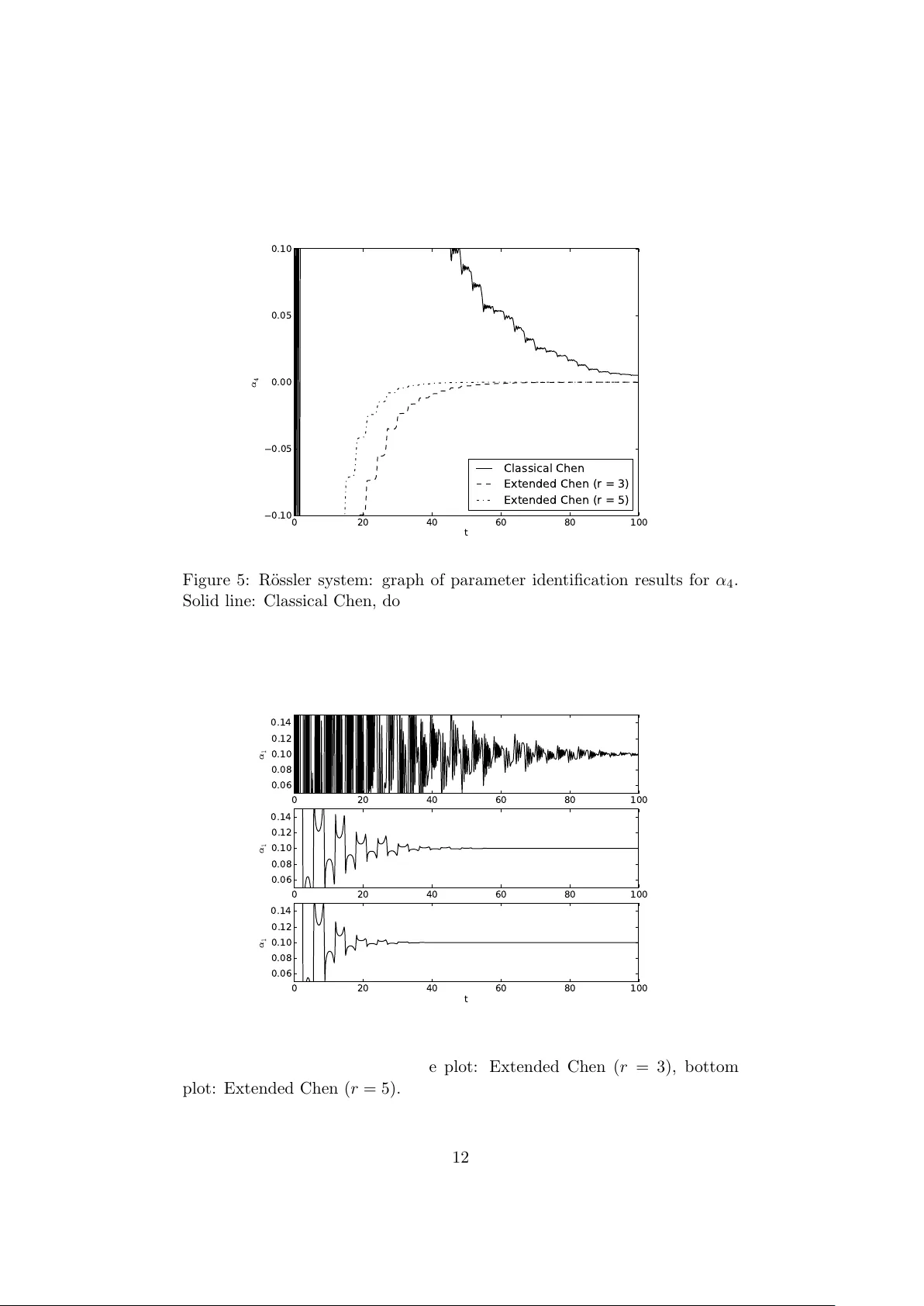
On the scalabilit y and con v ergence of sim ultaneous parameter iden tification and sync hronization of dynamical systems Bruno Nery Ro drigo V en tura Institute for Systems and Rob otics Instituto Sup erior T ´ ecnico, Lisb on, P ortugal Abstract The sync hronization of dynamical systems is a metho d that allows t wo systems to hav e identical state tra jectories, appart from an error con verging to zero. This metho d consists in an appropriate unidirec- tional coupling from one system (driv e) to the other (resp onse). This requires that the resp onse system shares the same dynamical model with the drive. F or the cases where the drive is unkno wn, Chen prop osed in 2002 a metho d to adapt the resp onse system such that sync hronization is ac hieved, pro vided that (1) the response dynamical mo del is linear with a vector of parameters, and (2) there is a param- eter vector that mak es b oth system dynamics identical. How ev er, this metho d has t wo limitations: first, it do es not scale well for complex parametric mo dels (e.g., if the num b er of parameters is greater than the state dimension), and second, the mo del parameters are not guar- an teed to conv erge, namely as the synchronization error approaches zero. This pap er presents an adaptation law addressing these t wo limitations. Stabilit y and con vergence pro ofs, using Ly apunov’s sec- ond metho d, support the prop osed adaptation law. Finally , numerical sim ulations illustrate the adv an tages of the prop osed metho d, namely sho wing cases where the Chen’s metho d fail, while the prop osed one do es not. 1 In tro duction Consider t wo iden tical contin uous time dynamical systems, designated drive (D) and r esp onse (R). It is well known that the state ev olution of each system, when taken separately , may differ radically if the initial condition for eac h system differ, namely in the case of c haotic dynamical systems [6, 4]. How ev er, in the presence of a unidirectional coupling from the drive to the resp onse system, synchronization of their state tra jectories is known to o ccur [10, 5, 8]. In this paper w e limit the discussion to the simplest coupling sc heme, in whic h the resp onse system receiv es the full state v ector from the 1 driv e. In this situation it is easy to design a con troller that synchronizes b oth systems, using feedbac k linearization (Section 2). Suc h sync hronization assumes that b oth drive and resp onse hav e the same dynamical mo del. This pap er addresses the problem of achieving syn- c hronization of a response system, when the dynamical mo del of the drive is unknown. In particular, w e target the problem of simultane ous adap- tation and synchr onization of a r esp onse system, given an unknown drive. Tw o assumptions are made: (1) the resp onse dynamical mo del dep ends lin- early on a parameter v ector, and (2) there is a v alue for this v ector that mak es b oth systems identical. In 2002, Chen and L ¨ u prop osed a metho d to simultaneously adapt this parameter vector and to make b oth systems sync hronized [3]. Ly apunov second metho d was used to prov e the feasibility of this metho d, ho wev er, due to the construction of the Lyapuno v function emplo yed, con vergence of the resp onse parameters is not guaranteed. This has t w o consequences that preven t the general usage of this metho d. Firstly , it do es not scale in complexit y: if the dimension of the parameter vector is greater than the dimension of the state vector, conv ergence is not guaran- teed. And secondly , ev en with a small num b er of parameters, Chen’s pro of do es not guaran tee effective con vergence of the parameters. In this pap er w e address b oth of these problems, presen ting a conv ergence pro of for the simultaneous sync hronization and adaptation of the resp onse to an arbitrary drive system. Moreo ver, numerical sim ulations comparing the prop osed approach with Chen’s metho d illustrate the b enefits of the approac h. Chaotic synchronization was first introduced b y P ecora and Carrol in 1990 [7]. Since then, man y publications hav e deep end our knowledge ab out this concept [1, 5, 8, 2]. A method for sync hronizing the R¨ ossler and the Chen chaotic systems using active control was prop osed b y Agiza and Y assen [2], how ever the approach is sp ecific to these particular systems. Chen and L ¨ u prop osed a metho d to p erform sim ultaneous identification and sync hronization of c haotic systems [3], but the results sho w some limitations, whic h are discussed in length and addressed in this paper. The pap er is structured a follows: section 2 states formally the problem, follo wed by the prop osed solution in section 3; exp erimen tal results are presen ted in section 4, and section 5 concludes the paper. 2 Problem statemen t Consider tw o dynamical systems, called drive and r esp onse , with a unidi- rectional coupling b etw een them. Throughout this pap er we will assume that b oth driv e and resp onse systems are identical, apart from a parameter v ector, which is unknown. The goal of the adaptation law is to determine 2 this parameter v ector. Consider the driv e system modeled b y ˙ x = f ( x ) + F ( x ) θ , (1) where x ( t ) ∈ R n is the state v ector, and θ ∈ R m is a parameter v ector. The nonlinear functions that supp ort the model are f : R n → R n and F : R n → R ( n × m ) . The coupling b et ween the driv e and the response systems consists in a bias term, called synchr onization input, from the driv e to the resp onse. The resp onse system is iden tical to the drive, except for the parameter vector α ∈ R m and the sync hronization input U, ˙ y = f ( y ) + F ( y ) α + U ( y , x, α ) , (2) where y ( t ) ∈ R n is the resp onse state vector, and U : R n × R n × R m → R n is the synchronization con trol function. This function U realizes the controller that, giv en the state input from the driv e, sync hronizes the response system. Define the state error e = y − x and the parameter error ∆ = α − θ ; the sim ultaneous adaptation and sync hronization problem consists in the design of a con troller U and of a parameter adaptation law for α such that b oth lim t →∞ e ( t ) = 0 and lim t →∞ ∆( t ) = 0. Chen proposes in [3] a solution to this problem in the form of an adap- tation law for α . Assumption 1. Ther e is a c ontr ol ler U and a sc alar function V ( e ) that, for α = θ , satisfies b oth (i) c 1 || e || 2 ≤ V ( e ) ≤ c 2 || e || 2 and (ii) ˙ V ( e ) ≤ − W ( e ) , for c 1 , c 2 p ositive c onstants, W ( e ) a p ositive definite function, and U ( x, x, u, θ ) = 0 . F or example, the controller U ( y , x, θ ) = − e + f ( x ) − f ( y ) + [ F ( x ) − F ( y )] θ , (3) and the function V ( e ) = 1 2 e T e satisfy this assumption. Theorem 1. Under Assumption 1, the adaptation law ˙ α = − F T ( x ) [grad V ( e )] T (4) stabilizes the system at the e quilibrium p oint e = 0 , α = θ . Pr o of. See [3]. In the proof of this theorem, Chen employs the Lyapuno v function V 1 ( e, α ) = 1 2 e T e + 1 2 ∆ T ∆ . (5) There is an hidden assumption in the pro of: it only holds if U ( y , x, α ) − U ( y , x, θ ) = [ F ( x ) − F ( y )] ∆ (whic h is true if con troller (3) is used). 3 Still, tw o problems remain that compromise the applicabilit y of this re- sult. The first one is that (4) do es not guaran tee strict definite p ositiveness of − ˙ V 1 ; in particular, ˙ V 1 (0 , α ) = 0 for all v alues of α . This means that, as the sync hronization error e approac hes zero, the magnitude of the param- eter error ∆ is not guaran teed to decrease. The second problem concerns the null space of F T ( x ): according to (4), the parameter vector α remains c hanged, as long as grad V ( e ) lies in the n ull space of F T ( x ). T aking for instance V ( e ) = 1 2 e T e , while the state error e lies in this null space, the parameter vector α remains unc hanged, even if α 6 = θ . 3 Prop osed solution Let us first obtain a con troller function U that achiev es sync hronization, assuming that the true v alue of the parameter v ector is known, α = θ . In this situation, the error state e has the follo wing dynamics ˙ e = f ( y ) − f ( x ) + [ F ( y ) − F ( x )] θ + U ( y , x, θ ) . (6) Considering now the p ositive definite Lyapuno v function V ( e ) = 1 2 e T e, (7) its time deriv ativ e is ˙ V = e T ˙ e . T aking the con troller U ( y , x, θ ) = − K e − f ( y ) + f ( x ) − [ F ( y ) − F ( x )] θ , (8) where K is a ( n × n ) p ositive definite matrix, w e hav e that ˙ e = − K e . Ma- trix K is thus related with the synchronization rate. Since − ˙ V = e T K e is a p ositive definite function, for a positive definite K , system (6) is globally uniformly asymptotically stable [11] at the equilibrium p oint e = 0. Note that this controller satisfies Chen’s Assumption referred in the previous sec- tion. Consider now the p ositive definite Lyapuno v function V ( e, ∆) = 1 2 e T e + 1 2 ∆ T ∆ . (9) This function is zero if and only if both the response is sync hronized with the drive, and its parameters equal the drive ones. The dynamics of the error e , while using the con troller (8), is then ˙ e = − K e + F ( x ) ∆ . (10) By left multiplying this equation b y F T ( x ) L , where L is a ( n × n ) p ositive definite matrix (which is related with the adaptation rate; see b elow), and transp osing the result, one gets the relation ∆ T F T ( x ) L T F ( x ) = ˙ e T L T F ( x ) + e T K T L T F ( x ) . (11) W e are no w in condition to pro v e the main result of this pap er: 4 Theorem 2. Assuming that ther e is a c onstant matrix L such that G ( x ) = F T ( x ) L T F ( x ) is p ositive definite for al l x , the adaptation law ˙ α = − F T ( x ) [( L K + I ) e + L ˙ e ] , (12) to gether with the c ontr ol ler (8) , glob al ly uniformly stabilizes b oth the err or system (10) at e = 0 , and the p ar ameter err or at ∆ = 0 . Pr o of. Considering the Lyapu nov function (9), w e ha ve ˙ V = e T ˙ e + ∆ T ˙ ∆. T aking the adaptation la w (12) together with (11), while noting that ˙ ∆ = ˙ α , one obtains ˙ V = − e T K e − ∆ T G ( x )∆ . (13) Since G ( x ) is assumed p ositive definite, − ˙ V is also p ositiv e definite, from whic h we can conclude that ( e, ∆) = (0 , 0) is a globally uniformly asymp- totically stable [11] equilibrium p oint of (10). This theorem implies b oth sync hronization ( y = x ) and correct iden tifi- cation of the parameters ( α = θ ). Note that the practical use of the prop osed adaptation law (12) requires knowledge of the error time deriv ativ e ˙ e , which in principle can b e obtained (or estimated) from the error evolution. The c hoice of the constant matrices K and L hav e impact on the conv er- gence rate. If α = θ , the error system is ˙ e = − K e , meaning that the error decreases asymptotically to zero according to a first-order linear dynamics with a time constant determined by K . If e = 0, the parameter error has the dynamics ˙ ∆ = − F T ( x ) L F ( x ) ∆, and thus the magnitude of L impacts on the con vergence rate of the parameters. Simple choices for K and L are diagonal matrices with constant v alues, K = k I and L = l I , for k and l t wo p ositive scalars. Thus, the state and parameter error dynamics b ecome ˙ e = − k e and ˙ ∆ = − l F T ( x ) F ( x ) ∆. Since F ( x ) is a ( n × m ) matrix, its rank is low er or equal to min( n, m ), and thus the rank of G ( x ) is also lo wer and equal to min( n, m ). Ho wev er, in order for G ( x ) to be p ositive definite, its rank has to b e equal to m (the dimension of the parameter v ector θ ), and thus n ≥ m is a necessary condition for G ( x ) to b e full rank. This means that there is an upp er b ound to the amount or parameters m , in order for con v ergence to be guaranteed. This largely limits the flexibility of the response system to adapt to arbitrary driv e systems, in particular with a large amoun t of parameters. T o tackle this problem we propose augmenting the F ( x ) matrix with extra rows, as many as needed, in order for G ( x ) to b ecome full rank. First, let us designate b y x ∗ ( t ) a new state vector consisting in the concatenation of time dela y ed v ersions of the original state v ector x ( t ), x ∗ = [ x 0 x 1 · · · x r ] T , (14) 5 where x i ( t ) = x ( t − i δ ), for i = 1 . . . r and a δ > 0. Using this state vector, the drive system b ecomes ˙ x ∗ = f ∗ ( x ∗ ) + F ∗ ( x ∗ ) θ , (15) where f ∗ ( x ∗ ) = f ( x 0 ) . . . f ( x r ) and F ∗ ( x ∗ ) = F ( x 0 ) . . . F ( x r ) . (16) This augmen ted system is equiv alen t to (1), as the additional state dimension corresp onds to time dela yed versions of the original system. The resp onse system, with state v ector y ∗ ∈ R ( r +1) n tak es the form ˙ y ∗ = f ∗ ( y ∗ ) + F ∗ ( y ∗ ) α + U ∗ ( y ∗ , x ∗ , α ) . (17) These t wo coupled systems (15) and (17) with state vectors x ∗ and y ∗ can b e viewed as a new pair of drive and resp onse systems b y themselves, with error vector e ∗ = y ∗ − x ∗ . Thus, the results obtained ab o ve can be directly applied here: the sync hronization controller b ecomes U ∗ ( y ∗ , x ∗ , α ) = − K ∗ e ∗ − f ∗ ( y ∗ ) + f ∗ ( x ∗ ) − [ F ∗ ( y ∗ ) − F ∗ ( x ∗ )] α, (18) where the matrix K ∗ can be a (( r + 1) n × ( r + 1) n ) blo c k diagonal formed b y K matrices, K ∗ = K 0 0 0 K 0 0 0 . . . . (19) The adaptation la w b ecomes then ˙ α = − F ∗ T ( x ∗ ) [( L ∗ K ∗ + I ) e ∗ + L ∗ ˙ e ∗ ] , (20) where L ∗ is a (( r + 1) n × ( r + 1) n ) matrix, whic h can also tak e the form of a blo ck diagonal in the same fashion as K ∗ ab o ve, L ∗ = L 0 0 0 L 0 0 0 . . . . (21) If b oth K ∗ and L ∗ ha ve the blo ck diagonal structure as in (19) and (21), the adaptation la w (20) can b e simplified into ˙ α = − r X i =0 F T ( x i ) [( L K + I ) e i + ˙ e i ] , (22) where e i = y i − x i and ˙ e i = ˙ y i − ˙ x i . With the ab o ve augmented system, w e can prov e con vergence when n < m with the follo wing Corollary: 6 Corollary 1. If matrix G ∗ ( x ) = ( F ∗ )( x ) T ( L ∗ ) T F ∗ ( x ) is ful l r ank for al l x , then the r esp onse system (17) , to gether with the adaptation law (20) , glob al ly uniformly stabilizes b oth the err or system (10) at e = 0 , and the p ar ameter err or at ∆ = 0 . Pr o of. The equiv alent driv e (15) and the resp onse (17) systems satisfy the conditions of Theorem 2, as long as G ∗ ( x ) is full rank. The rank of G ∗ ( x ) cannot b e guaran teed a priori, but a necessary condition Corollary can still b e stated: Corollary 2. If F has r ank n < m , then r ≥ d m n − 1 e is a ne c essary c ondition for G ∗ to b e ful l r ank. Pr o of. The rank of G ∗ = ( F ∗ ) T ( L ∗ ) T F ∗ is at most min[( r + 1) n, m ]. Since G ∗ is a m × m matrix, in order to b e full rank, ( r + 1) n ≥ m has to hold. Therefore, r ≥ m n − 1, but since r is an in teger, its low er b ound is d m n − 1 e . In general, as r is arbitrary , one can expect that there is a v alue of r large enough that mak es G ∗ full rank. Comparing the obtained adaptation la w (22) with (12) ab ov e, one can observ e that the gradient of the parameters depends on several time dela yed samples of the error e (as well as on their deriv atives ˙ e ). A p ossible in tuition to this result comes from the observ ation that, if m > n , the degrees of freedom of e are not enough to pro duce a meaningful gradien t for α , if the la w (12) is emplo yed. Ho wev er, with (22), whic h dep ends on e ∗ with ( r + 1) n degrees of freedom, the gradien t of α can hav e the full dimensionality of m . 4 Exp erimen tal results This section presents n umerical results illustrating the theoretical results deriv ed ab o ve. Two classical c haotic systems were used: the Lorenz os- cillator [12], commonly used in the chaotic sync hronization literature for n umerical simulations [5, 8, 3], and the R¨ ossler attractor, designed to b e- ha ve similarly to the Lorenz system while being easier to understand [9]. Sim ultaneous identification and synchronization is sim ulated, while com- paring the p erformance of Chen’s metho d [3] with the one prop osed here. F or the Chen’s metho d w e used con troller (3) with the adaptation la w (4), and for our metho d we used controller (18) with the adaptation law (22). The Lorenz oscillator is a three-dimensional dynamical system that b e- ha ves chaotically for a certain set of parameters [12]. In the form of (1), it can b e written as ˙ x ˙ y ˙ z = 0 − y − xz xy + y − x 0 0 0 x 0 0 0 − z θ 1 θ 2 θ 3 (23) 7 0 50 100 150 200 t 0.4 0.3 0.2 0.1 0.0 0.1 α 4 Classical Chen Extended Chen (r = 3) Extended Chen (r = 5) Figure 1: Lorenz system: graph of parameter iden tification results for α 4 . Solid line: Chen’s method (4), dotted and dash-dotted lines: prop osed metho d (22) for r = 3 and for r = 5. where x , y and z are state v ariables and θ 1 , θ 2 and θ 3 are system parameters. The Lorenz oscillator was synchronized with a response system, whic h is sp ecified by four parameters. In the form of (2), it can be written as ˙ u ˙ v ˙ w = 0 − v − uw uv + v − u 0 0 0 0 u 0 0 0 0 − w 1 α 1 α 2 α 3 α 4 + u 1 u 2 u 3 (24) where u , v and w are state v ariables and α 1 , α 2 , α 3 and α 4 are the param- eters. Note that the rank of the F ( x ) matrix in (24) is at most 3, while the resp onse systems uses 4 parameters: α 4 is an unnecessary parameter that is not presen t in the driv e (23), b eing artificially in tro duced to comparing the tw o approac hes when m > n . As it w as sho wn b efore, under these conditions Chen’s metho d is not guaranteed to con verge, while Corollary 2 requires r ≥ 1 for G ∗ to b e full rank, and th us a necessary condition for con vergence (as Corollary 1). F or this simulation, the classical parameter v alues for the Lorenz sys- tem were used: [ θ 1 , θ 2 , θ 3 , θ 4 ] T = [10 , 28 , 8 / 3 , 0] T . The initial states of the driv e system and the con trolled system were arbitrarily set to [8 , 9 , 10] T and [3 , 4 , 5] T , resp ectiv ely . The parameters of the resp onse system had zero initial condition. The L and K parameters were set to 10 I and 0 . 1 I . 8 0 200 400 600 800 1000 t 0.4 0.3 0.2 0.1 0.0 0.1 α 4 Figure 2: Lorenz system: graph of parameter identification results for α 4 using Chen’s method (4). 0 20 40 60 80 100 2.60 2.65 2.70 2.75 α 3 0 20 40 60 80 100 2.60 2.65 2.70 2.75 α 3 0 20 40 60 80 100 t 2.60 2.65 2.70 2.75 α 3 Figure 3: Lorenz system: plot of parameter iden tification results for α 3 . T op plot: Chen’s metho d (4), middle and bottom plots: prop osed method (22) for r = 3 and for r = 5. 9 0 2 4 6 8 10 0 50 100 150 200 250 300 350 400 V 0 2 4 6 8 10 t 0 20 40 60 80 100 V Figure 4: Lorenz system: graph of Lyapuno v function for sync hronization error. T op plot: Chen’s metho d (4), b ottom plot: prop osed metho d (22) for r = 3. Figure 1 sho ws the numerical results 1 of parameter iden tification for pa- rameter α 4 . Note the trend for the parameter con vergence to b e faster for higher v alues of r . Figure 2 sho ws the results of parameter iden tification for the parameter α 4 for Chen’s metho d ov er a longer time horizon. While Chen’s metho d is not able to iden tify this parameter even after 1000 seconds, our method allo ws for a significan tly faster con vergence (under 200 seconds). Figure 3 shows the results of parameter iden tification for α 3 . T able 4 shows the time it tak es for the parameter iden tification error to fall b elo w a p er- cen tage of the real parameter v alue. Note again that the con vergence is faster for higher v alues of r . It is interesting to note that, for instance, during the last 20 seconds of the sim ulation, the co efficien t of v ariation 2 of the ro ot mean square error is of 4 . 42 × 10 − 3 for Chen’s metho d, while for our metho d it is of 1 . 21 × 10 − 4 ( r = 3) and 1 . 36 × 10 − 6 ( r = 5). Chen’s metho d is not able to correctly iden tify this parameter, with its v alue oscil- lating around the true v alue of θ 3 . Our metho d, how ever, allows for a lo wer v ariance in the parameter identification. Figure 4 shows the sync hroniza- tion error, as measured b y the Ly apunov function (7). Both Chen’s metho d and ours are able to drive the synchronization error to zero. Our metho d, ho wev er, shows near-instan taneous conv ergence. Also, the magnitude of the 1 All sim ulations were p erformed using Python together with SciPy and PyDDE li- braries. 2 The co efficient of v ariation is defined as the ratio σ / | µ | , where σ is the standard deviation and µ the sample mean. 10 T able 1: Time to reac h iden tification error ranges for parameter α 3 (in sim ulation seconds) Metho d Iden tification error 1% 0.1% 0.01% 0.001% Classical Chen 203.0 1609.8 3026.9 4640.3 Extended Chen r = 1 0.4 261.5 612.1 942.7 r = 2 10.3 104.8 226.7 308.5 r = 3 2.5 58.4 106.5 163.8 r = 4 2.5 31.1 70.9 94.8 r = 5 2.5 21.6 43.5 67.3 error is reduced b y comparison to Chen’s metho d. Similar results w ere obtained using the R¨ ossler attractor. In the form of (1), it can b e written as ˙ x ˙ y ˙ z = − y − z x xz + 0 0 0 y 0 0 0 1 − z θ 1 θ 2 θ 3 (25) where x , y and z are state v ariables and θ 1 , θ 2 and θ 3 are system parameters. The R¨ ossler system was synchronized with a resp onse system sp ecified by four parameters. In the form of (2), it can b e written as ˙ u ˙ v ˙ w = − v − w u uw + 0 0 0 0 v 0 0 1 0 1 − w 0 α 1 α 2 α 3 α 4 + u 1 u 2 u 3 (26) where u , v and w are state v ariables and α 1 , α 2 , α 3 and α 4 are the pa- rameters. Again, the rank of the F ( x ) matrix is 3, while the num b er of parameters is 4. F or this simulation, the commonly used parameter v alues for the R¨ ossler system were used: [ θ 1 , θ 2 , θ 3 , θ 4 ] T = [0 . 1 , 0 . 1 , 14 , 0] T . The initial states of the drive system and the controlled system were arbitrarily set to [8 , 9 , 10] T and [3 , 4 , 5] T , resp ectiv ely . The parameters of the resp onse system had zero initial condition. The L and K parameters w ere set to 10 I and 0 . 1 I (for I b eing the iden tit y matrix with appropriate dimensions). The improv ed con vergence p erformance of the prop osed metho d ov er Chen’s is clearly visible in Figure 5, while parameter conv ergence is faster for higher v alues of r . Figure 6 shows the results of parameter iden tification for α 1 , which, together with α 4 , sp ecifies the ev olution of the state v ariable v . During the last 20 seconds of the exp erimen t, the coefficient of v ariation of the root mean square error is of 2 . 96 × 10 − 2 for Chen’s m ethod, while for our method it is of 6 . 11 × 10 − 5 ( r = 3) and 3 . 32 × 10 − 7 ( r = 5). Chen’s 11 0 20 40 60 80 100 t 0.10 0.05 0.00 0.05 0.10 α 4 Classical Chen Extended Chen (r = 3) Extended Chen (r = 5) Figure 5: R¨ ossler system: graph of parameter iden tification results for α 4 . Solid line: Classical Chen, dotted line: Extended Chen ( r = 3, dash-dotted line: Extended Chen ( r = 5). 0 20 40 60 80 100 0.06 0.08 0.10 0.12 0.14 α 1 0 20 40 60 80 100 0.06 0.08 0.10 0.12 0.14 α 1 0 20 40 60 80 100 t 0.06 0.08 0.10 0.12 0.14 α 1 Figure 6: R¨ ossler system: plot of parameter identification results for α 3 . T op plot: Classical Chen, middle plot: Extended Chen ( r = 3), bottom plot: Extended Chen ( r = 5). 12 0 5 10 15 20 0 10 20 30 40 50 60 V 0 5 10 15 20 t 0 5 10 15 20 25 30 V Figure 7: R¨ ossler system: graph of Lyapuno v function for synchronization error. T op plot: Classical Chen, b ottom plot: Extended Chen ( r = 3). metho d cannot identify this parameter correctly , with its v alue oscillating around the true v alue of θ 3 . On the other hand, our metho d allo ws for stable parameter identification. Again, conv ergence is faster for greater v alues of r . Finally , Figure 7 shows the synchronization error, as measured by the Ly apunov function (7). Both metho ds driv e the synchronization error to zero, while our metho d shows a significan tly faster conv ergence. Also, the magnitude of the error is reduced by comparison to Chen’s method. 5 Conclusions Building up on previous work in sim ultaneous parameters identification and sync hronization of dynamical systems, this pap er prop oses an improv ed metho d that addresses limitations of the previously published Chen’s metho d [3]. The prop osed metho d is capable of handling arbitrarily large parame- ter space dimensions. Con vergence pro of of the metho d is pro vided, using the Lyapuno v’s second metho d. Numerical results illustrate the prop osed metho d, comparing it to Chen’s and showing b etter p erformance in terms of b oth faster and less noisy parameter identification. References [1] V. S. Afraimovic h, N. N. V eric hev, and M. I. Rabino vich. Sto chastic sync hronization of oscillation in dissipative systems. R adiophysics and 13 Quantum Ele ctr onics , 29(9):795–803, 1986. [2] H.N. Agiza and M.T. Y assen. Sync hronization of rossler and chen c haotic dynamical systems using active control. Physics L etters A , 278(4):191–197, 2001. [3] Shih ua Chen and Jinhu L ¨ u. Parameters iden tification and synchroniza- tion of chaoti c systems based up on adaptiv e control. Physics L etters A , 299:353–358, 2002. [4] C. Greb ogi, E. Ott, and J.A. Y orke. Chaos, strange attractors, and fractal basin b oundaries in nonlinear dynamics. Scienc e , 238(4827):632– 638, 1987. [5] L. Ko carev and U. Parlitz. Generalized sync hronization, predictabilit y , and equiv alence of unidirectionally coupled dynamical systems. Physic al R eview L etters , 76(11):1816–1819, Marc h 1996. [6] E.N. Lorenz. Deterministic Nonp erio dic Flo w1. A tmos. Sci , 1963. [7] Louis M. P ecora and Thomas L. Carroll. Sync hronization in chaotic systems. Physic al R eview L etters , 64(8):821–825, 1990. [8] Louis M. P ecora, Thomas L. Carroll, Gregg A. Johnson, and Douglas J. Mar. F undamentals of sync hronization in chaotic systems, concepts, and applications. Chaos , 7(4):520–543, 1997. [9] O.E. R¨ ossler. An equation for contin uous c haos. Physics L etters A , 57(5):397–398, 1976. [10] Nik olai F. Rulk ov, Mikhail M. Sushchik, Lev S. Tsimring, and Henry D. I. Abarbanel. Generalized sync hronization of c haos in directionally coupled c haotic systems. Physic al R eview E , 51(2):980–994, F ebruary 1995. [11] Shank ar Sastry . Nonline ar Systems: Analysis, Stability, and Contr ol . Springer, 1999. [12] W. T uck er. The Lorenz attractor exists. Comptes R endus de l’A c ad´ emie des Scienc es-Series I-Mathematics , 328(12):1197–1202, 1999. 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment